2.10月の課題
3.9月の解答
4.11月の授業予告
5.今後の授業スケジュール
6.お知らせ
1. 10月授業まとめ
1.0 <スタートアップ(全コース)>
割愛します。
1.1 <プレプライマリーコース『ロボレール』>
対象者はいません。
1.2 <プライマリーコース『SLロボロコ』>
割愛します。
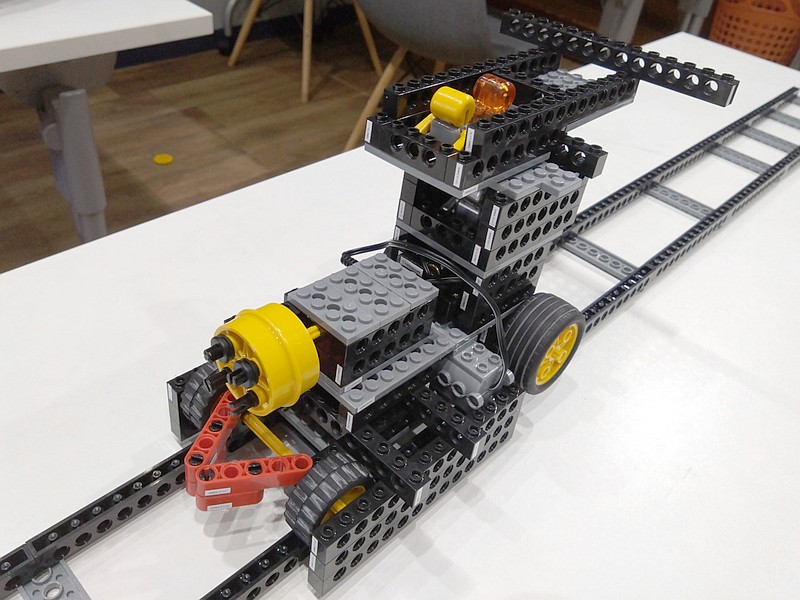




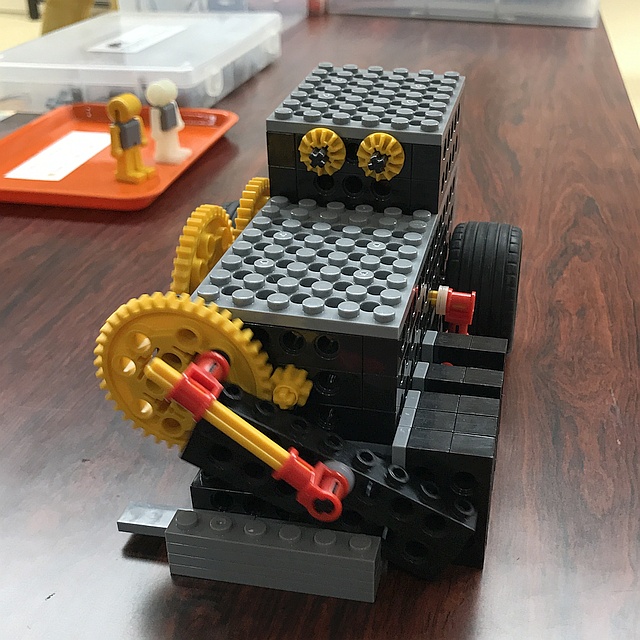
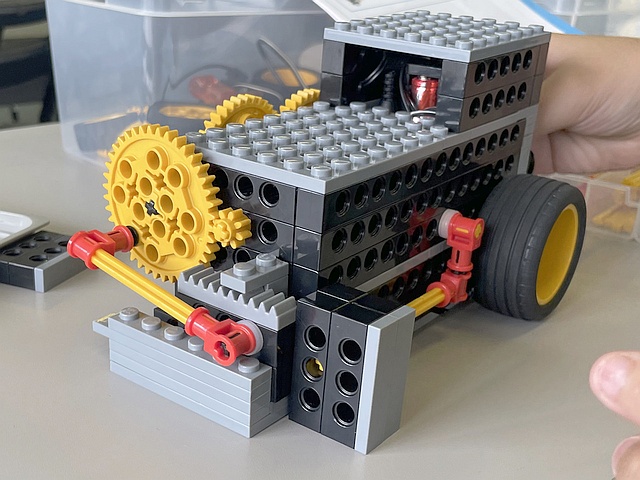
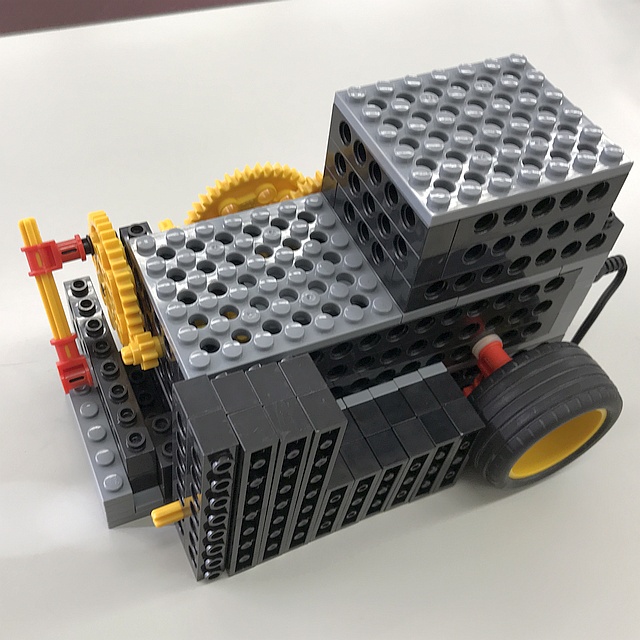
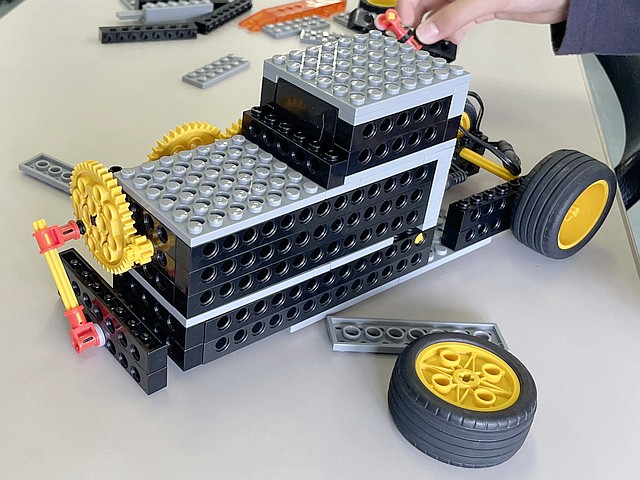
1.3 <ベーシックコース『ロボドミーノ』>


第8回アイデアコンテスト全国大会(2018年)特別賞作品(当時小5)がベースの、ドミノ配列マシンです。
簡単なパーツでドミノになって、ありそうでなかったロボット。
アイデアの着想(ちゃくそう)そのものが素晴(すば)らしいですね。
ドミノを並(なら)べる方式として、
A) 本体にドミノを載(の)せておき、1枚ずつ置く
B) ドミノを地面に集めておき、間隔(かんかく)を空(あ)けていく
などが考えられますが、ロボドミーノは A) のように見えて B) に近い方式と言えます。
テキストp.20に図解の通り、仕組みは難(むつか)しくありませんが、
下記を調整(ちょうせい)しなければスムーズに動かず、とても大切です。
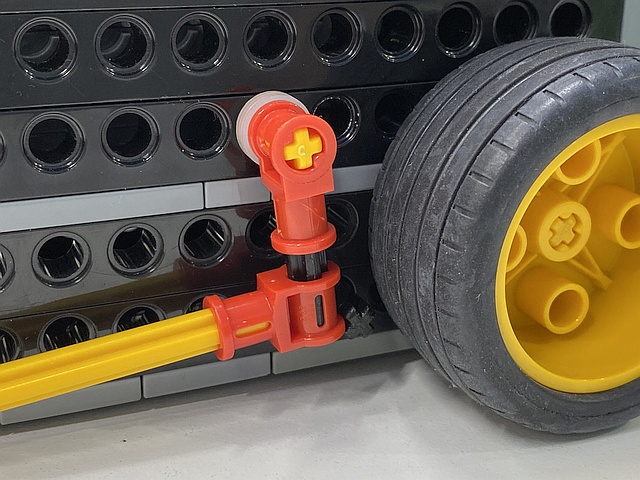 1) Tジョイントがシャフトペグに当たること(テキストp.18)
1) Tジョイントがシャフトペグに当たること(テキストp.18)シャフトペグに当たるくらいまでTジョイントを下げておかないと、後ろの方のドミノが地面から浮(う)いてしまい、前に出てこなくなります。
またTジョイントを下げすぎても、前の方のドミノが地面から浮いてしまいます。
2) 押し出すビーム8ポチの位置(テキストp.19)
テキスト写真の通りに位置を調整しないと、ビーム8ポチを十分に押し出したり、完全に引っ込(こ)めたりできず、1枚ずつ安定してドミノを出せなくなります。
 3) ビーム8ポチがスライドしやすいように溝(みぞ)を広げる
3) ビーム8ポチがスライドしやすいように溝(みぞ)を広げる見た目では分かりませんが、ビーム8ポチがスライドする溝(みぞ)の幅(はば)がわずかでも狭(せま)いと、ビーム8ポチが強く擦(こす)れてスムーズに動けませんので、
少し広げておく(見た目は変わらない)か、溝を浅(あさ)く作ります。
その上で、スライド用ビームが浮き上がらないようカバーを付けるのも良いですね。

さて、並べたドミノが倒(たお)れるように、狭(せま)い間隔(かんかく)でドミノを押し出すために、
●押し出すスピードは素早(すばや)く
●走行スピードは遅(おそ)く
せねばなりません。
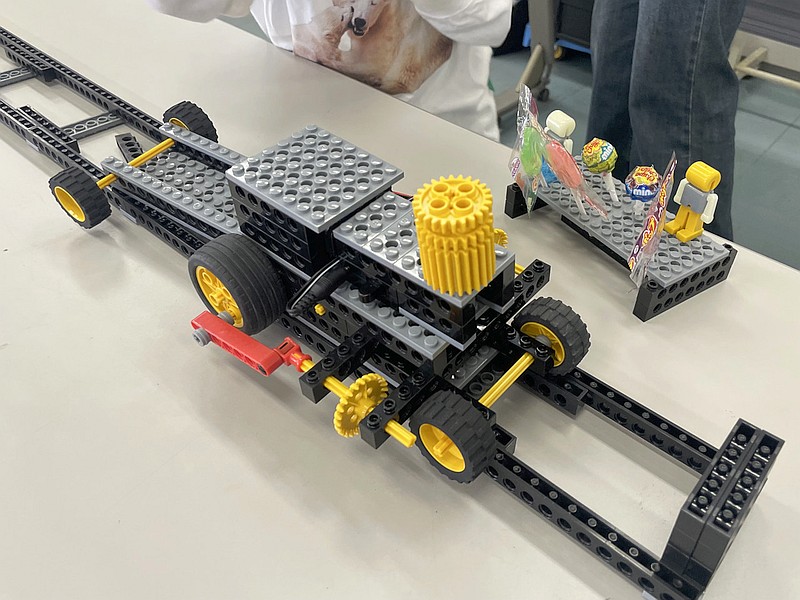
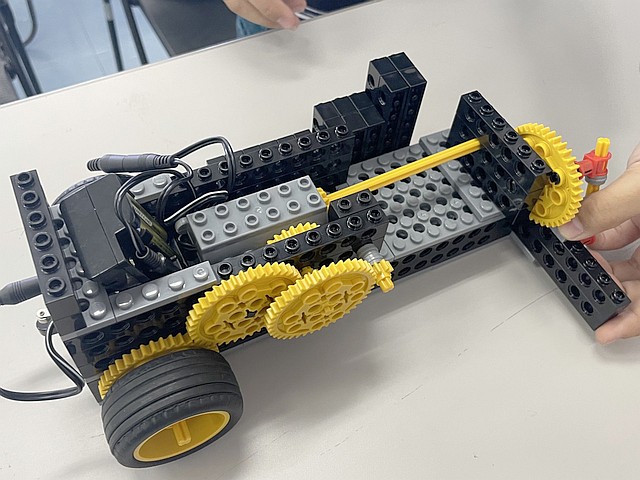
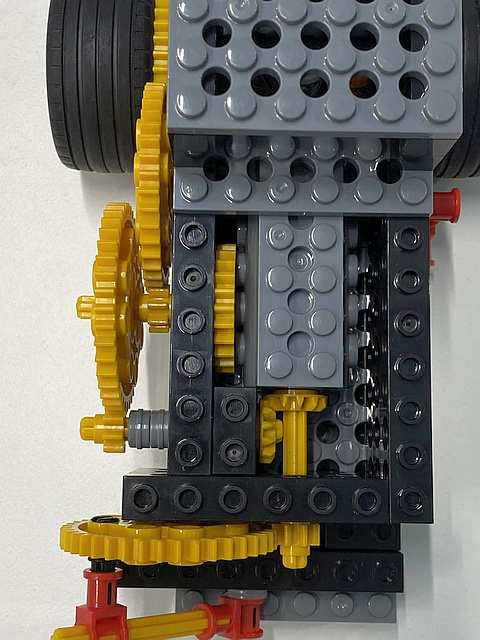 ビーム8ポチを押し出す正面のギアLは、モーターに取り付けたピニオンギアから回され、5倍おそく(1/5に)なっています。
ビーム8ポチを押し出す正面のギアLは、モーターに取り付けたピニオンギアから回され、5倍おそく(1/5に)なっています。タイヤLは、同じように5倍おそくなる箇所(かしょ)が2段あるので、5×5=25倍おそく(1/25に)なっています。
よって、タイヤLの方が5倍おそく、正面のギアLの方を5倍速(はや)くしています。
タイヤを回すために、マイタギア2枚を噛(か)み合わせて、正面のギアLを回すシャフトから右方向に回転軸(じく)を分配する設計も美しいです。
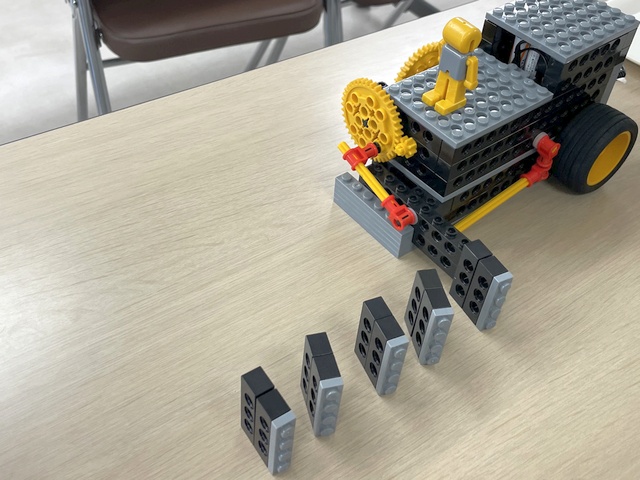
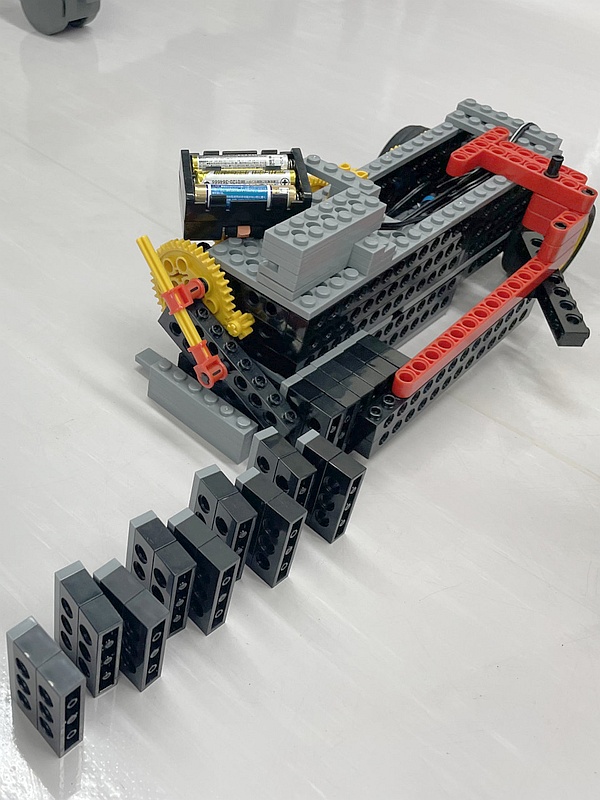
このマシンでは、多くても7枚のドミノしか並べられないのが少し物足(ものた)りませんね。
ドミノを刺(さ)すシャフト8ポチを12ポチに替(か)えると、最高で11枚並べられるようになります。
もしくは、本体を長くして、シャフトを使わずドミノホルダーを付けた改造でもっと並べるのに成功した生徒さんもいました。

自動で並べたドミノの列に、今度はロボドミーノを向かわせ、うまく連続して倒せた本数を競(きそ)うのも面白いゲームになります(*1)。

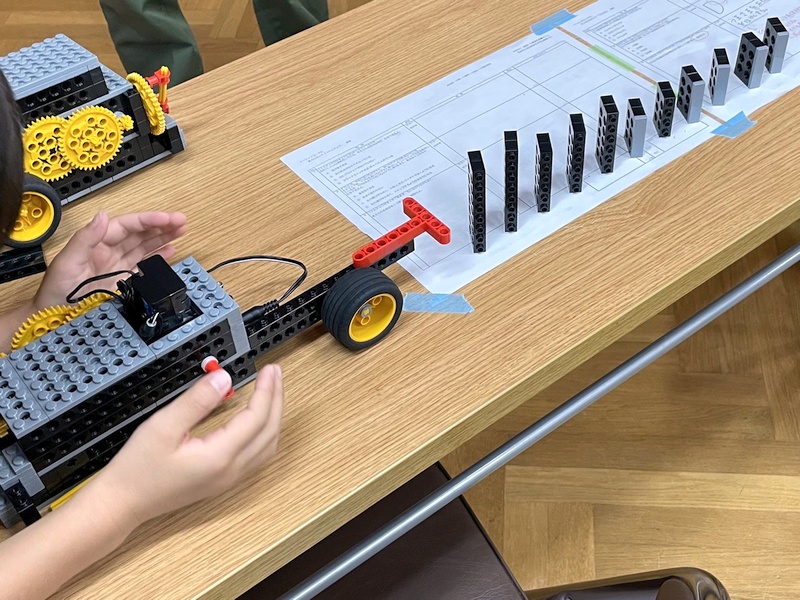
*1 ロボドミーノを普通に前進させても、ドミノの下部に当たり、押しのけるだけで倒れませんので、ドミノの上部を押せる突起(とっき)を取り付けたり、最後のドミノを倒れやすい高さにするなどの工夫が必要でした。
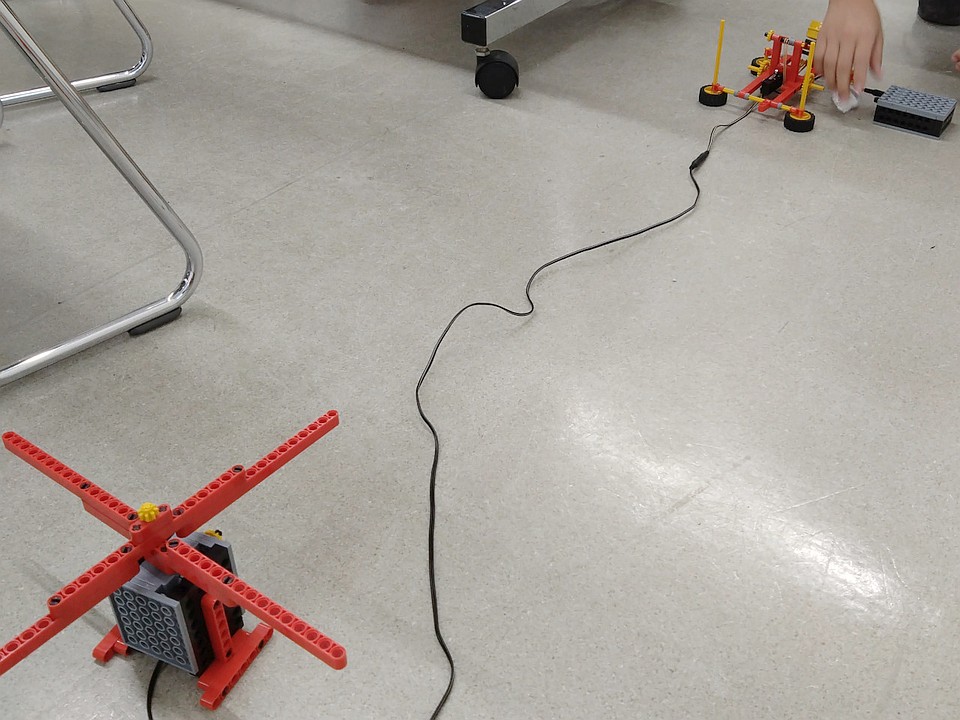
1.4 <ミドルコース『ロボバッター』>

ピッチャーとバッターの2部構成です。
モーターは1つだけなので、その動力はバッターに譲って、ピッチングは輪ゴムを使います。
逆に設計することもできますが、この方がコントロールし易いでしょう(*1)。
ピッチャーロボ(ピッチングマシン)の構造は、中世の戦争で利用された投石器そのものです。
いろんな物を投げ飛ばして、飛距離を観察してみました。
 そこそこ重い物(ギアの塊)で体積が同程度なら、軽い方が遠くまで飛びました。
そこそこ重い物(ギアの塊)で体積が同程度なら、軽い方が遠くまで飛びました。限られた輪ゴムのパワー(弾性エネルギー)で加速させ易いためです。
同程度に軽い物(ボール状に丸めた紙やティッシュ)なら、堅(かた)く丸めて体積を小さくした方が飛びました。
空気抵抗を受け難くなるためですね。
さて、投げられた物をバッティングするのは至難の業(しなんのわざ)です。
バットを振るタイミングの問題もありますが、そもそもピッチングが安定せず、同じ物を投げても飛距離がばらばら。
玉が加速中にバケット(ピッチャーの手)の中で動いてしまい、飛ばす方向やスピードが変わるからと考えられます(*2)。
まして、バッティングマシンのスイッチを手動でオンにする1日目のロボットでは、全くと言っていいほど玉に当たりません。


2日目にこれを自動化します。
電池ボックスから出たケーブルは、先ずはピッチャーに備(そな)え付けたタッチセンサー(黒)を経由させ、延長ケーブルを通して遠くのバッターに接続します。
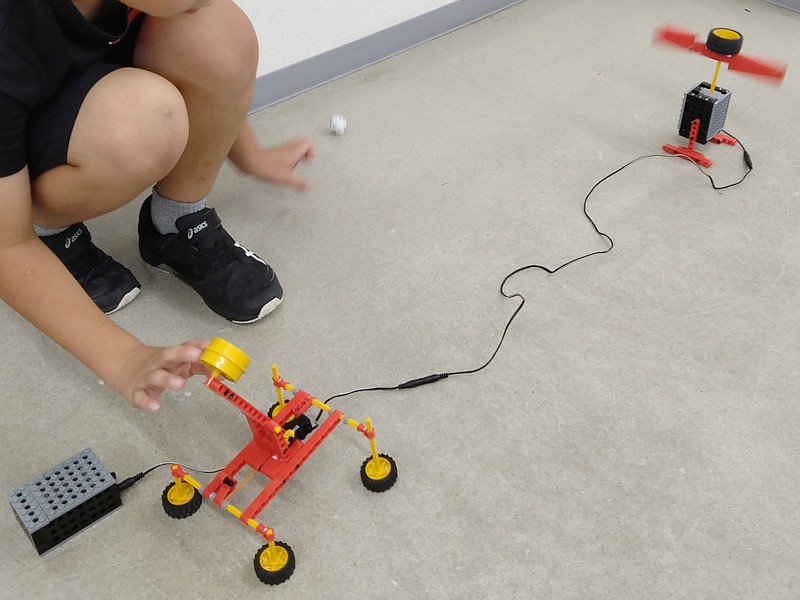
 タッチセンサー(黒)の代わりに、マイコンと音センサーを使えば、ピッチング音を感知した後どのくらい(時間・勢い)でバットを振るか、プログラムで柔軟にタイミング調整できますね。
タッチセンサー(黒)の代わりに、マイコンと音センサーを使えば、ピッチング音を感知した後どのくらい(時間・勢い)でバットを振るか、プログラムで柔軟にタイミング調整できますね。こうして、ピッチャーが玉を投げ終わった瞬間にバッター内のモーターが回り始め、バットを自動的に振るようになります。
さらに、いつまでもバットをぶん回し続けているのも格好悪いので、振り終わった位置にタッチセンサー(グレー)を備え付け、モーターを止めます。
これでバットを一回転分振るだけの、省エネ野球部になりました。
電池ボックス ⇒ タッチセンサー(黒) ⇒ タッチセンサー(グレー) ⇒ モーター
または
電池ボックス ⇒ マイコン/音センサー ⇒ タッチセンサー(グレー) ⇒ モーター
のような直列接続により、両方のセンサーがオンになる間だけ通電する仕組みができ上がります。
さて、肝心のバッティング精度ですが、ピッチングが安定しない中、タイミングだけは再現性を出せるので、二者間の距離や投球角度(*3)を調整すれば、5回中1回くらいは当てられるようになります。
ピッチングを安定化させた人なら、90%以上の確度で当たるでしょう。
こうして我々人間は、機械化の恩恵(おんけい)に与(あずか)るわけですね。
バットを大きくしたり、二刀流にしてみたりする改造も確率アップにつながります。


紅白に分かれ、陣地を狙って打ち合う玉入れや合戦も盛り上がりました。

*1 その大きな理由は、くねくね曲がっていても構わない延長ケーブルを使って、瞬時に電気エネルギーを遠くへ輸送できるからで、投げた直後にバットを振らせるのが簡単です。
自動車も、電気化するほどコントロール性に優れます。
*2 つまり、バケットの中でぐらつかない大きさの玉にすることが、ピッチングを安定化するためのコツです。
*3 同じ初速度でも、投げ上げる角度によって飛距離が変わります。一般に45°が最も飛ぶと言われますが、実際は玉によって異なる空気抵抗を受けるため、40°前後になるようです。
一方、バットに当たりやすいのは、もっと低く水平に近いのが理想ですが、低いほど玉の速度を上げねば届かず、それも当たりにくくなりますので、スローボールで15~30°位が理想でしょうか。
初速度と角度は、アームが止まった(ピッチャーの手を離れた)瞬間で決まります。
1.5 <アドバンスコース『カメラボ①』>
撮影ロボット『カメラボ』では、タブレットのカメラ機能を使います。
 カメラ起動中に音量ボタンを押すことでもシャッターをきれますので、プログラムからシャッターを操作できるようロボットを作りました。
カメラ起動中に音量ボタンを押すことでもシャッターをきれますので、プログラムからシャッターを操作できるようロボットを作りました。モータ軸に取り付けたロッド3アナを一瞬回して、音量ボタンに当てるだけで写真が撮れます。
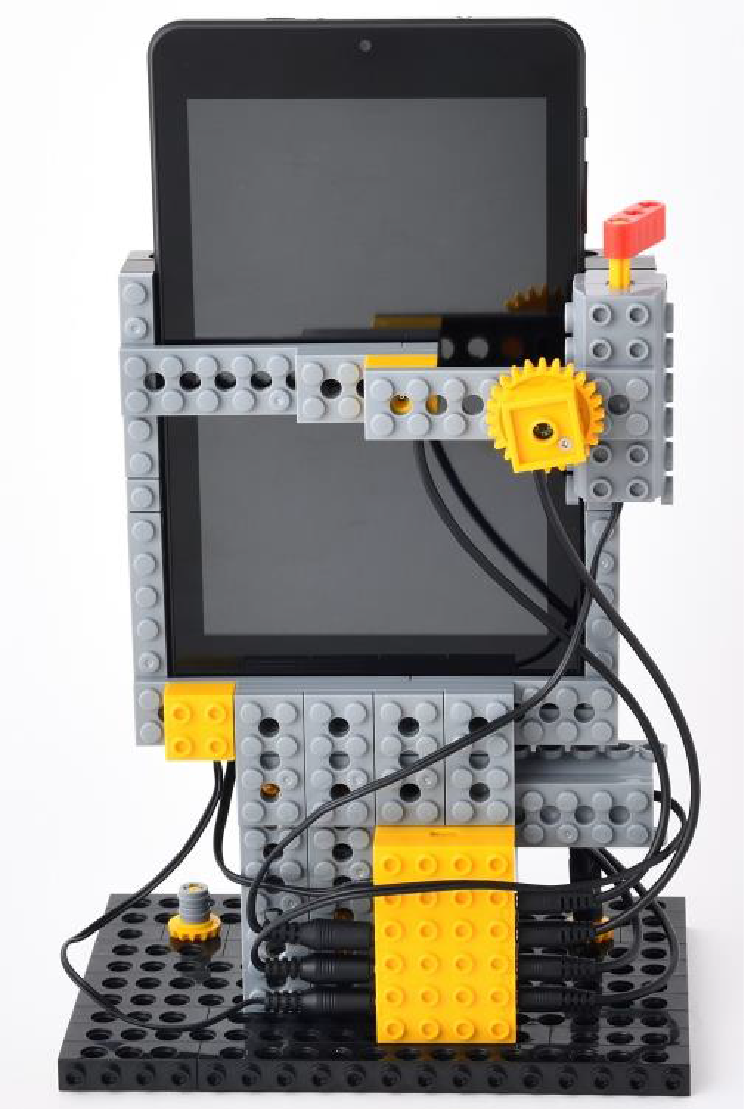 カメラボを2日目まで組み立て、首振り機能や音センサー、光センサーを追加しました。
カメラボを2日目まで組み立て、首振り機能や音センサー、光センサーを追加しました。センサーを用いることで、時間経過以外のきっかけ(トリガー)で写真を撮影することができます。
首振り機能を活用すれば、カメラの視角範囲外の撮影も可能です。
プログラムとセンサーの組み合わせ次第で、いろいろな使い方が考えられます。
光センサーや音センサーからの情報を使い、周囲の異変を検知する防犯カメラ。
首振り機能を活かし、部屋をぐるりと360°撮影できる監視カメラ。
定点撮影を一定間隔で行い、小さな変化を早送りすることで大きな変化として見ることのできるタイムラプスなどがあります。
このタイムラプスは、普段は見過ごしがちなスローな変化を改めて教えてくれますので、いろいろな対象物を撮影してみてください。
YouTubeなどで面白い動画に慣れきった皆さんに、タイムラプスの楽しさを伝えるために以下の動画作品を作ってみました!
【マジカル・ルイボスティー】
コップにお茶を少しずつ注ぎ足しては撮影します。
この連続写真をつなげると、コップのお茶が勝手に増えていく不思議な動画になります。
【忍び寄る影】 - 15秒おきに撮影
陽が射し込む部屋の様子を撮影したものです。影がだんだんと伸びていく様子が見て取れます。
タイムラプス撮影によって時間を早回しでき、普段は気づかない小さな変化を大きな変化として確認できます。
【キャッツ】 - 15秒おきに撮影
お家にペットがいるなら、撮影対象にすると新たな発見があるかもしれません。
この動画からは、キジ猫ちゃんはよく動くけど、黒猫ちゃんはほとんど寝てることが分かりますね。

【マイ・ドライブレコーダー】 - 3秒おきに撮影
カメラボを車のダッシュボードに据え付け、車窓を連続撮影しました。
実際には20分ほど時間が経過してますが、15秒ほどにギュッと縮められました。
道順も分かるため、道案内動画などに応用できそうですね。

【フル・ムーン】 - 15秒おきに撮影
定番の天体撮影です。このタブレットでは星の撮影は難しいので、月を狙いました。
カメラを東の夜空に向けてセットし、20時頃から1時間ほど連続撮影を行います。
月が昇っていく様子がよく分かりますね。
あまり月を長時間眺める機会などありませんから、興味深い動画となりました。

この他、コマ撮りを利用した皆さんの作品を紹介します。
【融合】7コマ撮り - 八幡東 鑓水 作
【ゾンビ】57コマ撮り - 東福間 守屋 作
【人造人間】31コマ撮り - 小倉北 砂川(ひ) 作
【鉄板運び】67コマ撮り - 小倉北 川田 作
【解体屋】57コマ撮り - 小倉南 栗本 作
【透明人間】63コマ撮り - 小倉南 高木 作
一昔前だと、写真を撮るためのコストが高く、このような遊びはできませんでした。
デジカメがプログラムやアプリから制御できるようになり、誰もがこのような撮影を楽しめるようになりました。
アイデア次第では、100万回再生を突破する動画アップも難しくないでしょう!?
ロボット本体の設計にこだわるのも良いですが、移動体視点のビデオ撮影も含めて、今タームは映像作品に制作力を注いでみてはいかがでしょうか。
1.6 <プロ1年目コース『リンクロボット①』>
Autumn(秋)タームとして、多脚リンクロボットを製作し、プログラム制御するまでの3ヶ月が始まりました。
脚がうにょうにょ動き、にょろにょろ走り回る姿態を空想して、否応無しに期待感が高まります。
 1ヶ月目は、2本1組の脚リンクから組み立てていきます。
1ヶ月目は、2本1組の脚リンクから組み立てていきます。1組2本の脚だけでも、うねうねと有機的な動きを見せます。
これが6組12本も組み合わさるとなれば、それは壮麗なのか、不気味なのか、いずれにせよ楽しみです。
図面や説明文の読解、パーツの向きや重ねる順番の照合、ネジやナット締め等、単体でも苦労する脚リンクを複雑に組み合わせるのですから、
空間認知、合理的思考、工作的センス(力加減、器用さ)に始まる、あらゆる能力を総動員して完成せねばなりません。
過去にも、大半の生徒さんが授業時間内には終わらず、家庭で進めて完成しても動かないか、動きがギクシャクしたり、自己分解してしまったり…。組み立てミスも続出するような代物です。
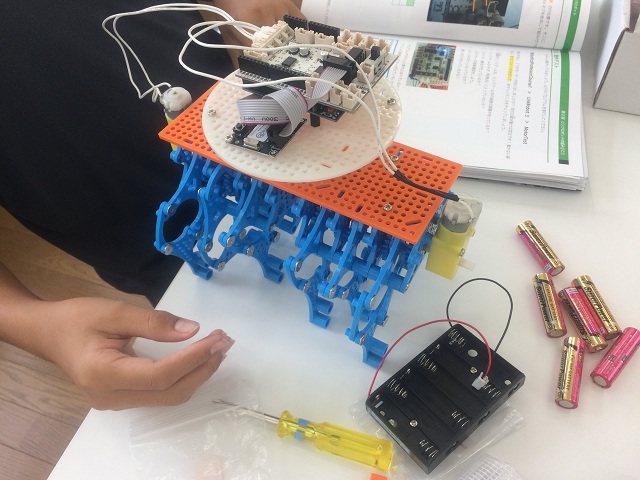 2日目に、マイコンボードや無線モジュールを搭載し、モーターを回して脚の動きをチェックするところですが…
2日目に、マイコンボードや無線モジュールを搭載し、モーターを回して脚の動きをチェックするところですが…手順を誤った脚の組み直しに迫られ、ほぼ間に合ってませんね。
完成すると、苦労の甲斐あって、その動きは有機的というか、節足動物的というか、初めて目にする者をゾッとさせる異様さがあります。
非日常性を奏するには十分過ぎるインパクトです。
大変な苦労をしてまで、何故こんな奇妙なリンクお化けを作らされるのかと言えば、
オランダのテオ・ヤンセン氏が考案した『ストランド・ビースト』という、世界中で崇(あが)められている有名なモゾモゾ歩行体があり、それを模しているからです。
アドバンスコース『モゾット』もそうでしたが、より忠実なリンク比率で再現したのが本ロボットです。
このリンク機構の何が優れているのか、『モゾット』で紹介したYouTube動画でおさらいしましょう。
■テオ・ヤンセンの歩行機構 Theo Jansen Mechanism
https://www.youtube.com/watch?v=uWzw7Jq9xBc
■【人工生命体】テオ・ヤンセンのストランドビーストがめちゃくちゃかっこいい【物理エンジン】
https://www.youtube.com/watch?v=mM_yJIEIqkA
■STRANDBEEST EVOLUTION 2017
https://www.youtube.com/watch?v=LewVEF2B_pM
次月では、コントローラーとプログラムを使って、思い通りにロボットを操縦します。
1.7 <プロ2年目コース『センサーロボット①』>
 これから3ヶ月で学習する『センサーロボット』は、1年目のオムニホイールロボットに、1年目の超音波センサー2個とカラーセンサーを取り付けたものです。
これから3ヶ月で学習する『センサーロボット』は、1年目のオムニホイールロボットに、1年目の超音波センサー2個とカラーセンサーを取り付けたものです。表示部の8×8ドットLEDマトリクスだけ、2年目パーツから7セグメントLED(*1)を取り出して代用したように見えますが、中身が大事ですよ。
 中身とはプログラムですね。少ない感覚器官や肢体のロボットでは、それをどう使いこなすかが重要です。
中身とはプログラムですね。少ない感覚器官や肢体のロボットでは、それをどう使いこなすかが重要です。1年目のプログラミングではまだまだ、これらのセンサーを複合的に使いこなせていません。
元来、思い込みや勘違いだらけの人間に、一縷(いちる)の誤りも許されないプログラミングは向いていません。
今のところ、他にやる主体が無いので、その中で、比較的向いている人や、好きな人がやっているだけです。
プログラムには間違い(バグ)が付き物です。
それどころか、正しいプログラムにすら、それを読む人間(それを書いた張本人すら)が誤った解釈をし、誤った改造(バグ)を入れます。
もう、どうしようもないですね、人間は。
だから、パソコンやスマホのOSもアプリも、アップデートだらけですね。数学と異なり、間違いは仕方がないものとされています。
しかし、それでも、品質を向上させる方策は必要です。その一つが「フローチャート(流れ図)」なのです。
やはり、文章(プログラム)と図(フローチャート)の直感的理解度・スピードは桁違いです。
書くべき作文の構想を練るときに、短い言葉で流れ図のようなメモを書くのと同じで、全景や過不足が把握しやすくなります。
一人でプログラミングする際は、このフローチャートを描くことが億劫で、ついサボりがちなのですが、およそ3ヶ月後の自分を苦しめます。
それ以上に、他人が製作し、自分とは異次元の設計思想に従った機械やプログラムをメンテナンスすることほど、苦労するものはありません。
そんなときに、設計図やフローチャートがあることでどんなに救われるか、どんなに嬉しいものか、計り知れません。
そんな見方を味わうことになるモノです。

 テキスト以上の詳細な解説はナンセンスにつき割愛しますが、
テキスト以上の詳細な解説はナンセンスにつき割愛しますが、各種のセンサー動作プログラムを試しながら、せっかくのフローチャートを参考に、少し高度化したプログラムの流れを把握し、いろいろ弄(いじ)ってみてください。
*1 通称「7セグ」で、7本の棒で数字を表示するデジタル表示器のこと。
これを先進性の象徴として多用した映画『バック・トゥ・ザ・フューチャー』世代のオジサンは今でもロマンを感じますが、高解像度ディスプレイが当たり前になった現代っ子には、ローテクの象徴のように見えるのでしょうか。
1.8 <プロ3年目コース『不思議アイテムIII-2①』>
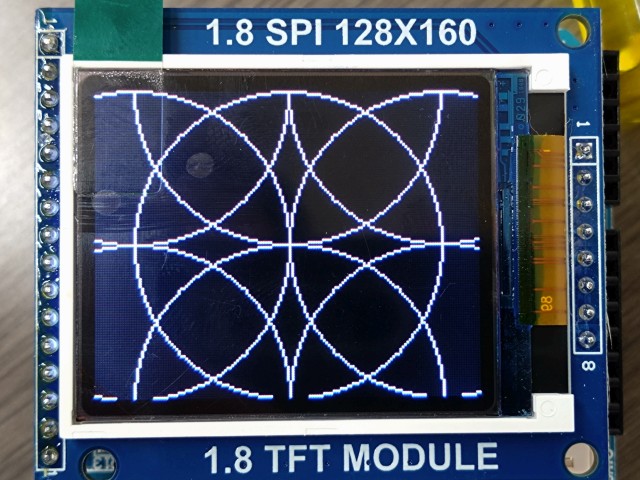
ついに3年目コースの目玉、フルカラーLCD(液晶ディスプレイ)に触れます。
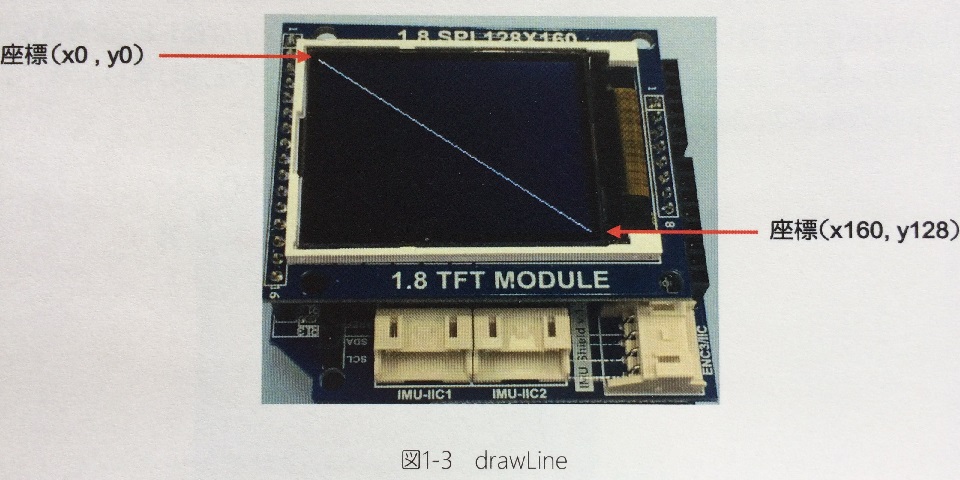 ドット数は160×128と、一昔前のガラケー画面並みですが、それでも、1・2年目でそれなりに遊べた8×8ドット赤色(1ビット単色)LEDマトリクスが320個も入るドット数で、さらに24ビットフルカラーですから、320×24=7680倍の情報量です(*1)。
ドット数は160×128と、一昔前のガラケー画面並みですが、それでも、1・2年目でそれなりに遊べた8×8ドット赤色(1ビット単色)LEDマトリクスが320個も入るドット数で、さらに24ビットフルカラーですから、320×24=7680倍の情報量です(*1)。本格的なゲームも作れる解像度ですから(*2)、CPUとメモリを相当に喰いそうですが、一段とレベルの高いCGプログラミングに応えてくれそうです。
 といっても、直線や四角形・円などを描画するのは、8×8マトリクス同様の関数が用意されていますから、考え方は同じです。
といっても、直線や四角形・円などを描画するのは、8×8マトリクス同様の関数が用意されていますから、考え方は同じです。同じような使い方でもCGがキレイになり、さらにカラー指定関数や引数が増えて楽しくなっただけです。損はありませんね。
2日目では、テキスト文字表示関数 TFT::text("文字列",x,y) を使って、画面上に任意のメッセージを書いてみました。色も大きさも簡単に変えられます。
やはり、アルファベット1文字か数字2桁がやっとの8×8マトリクスとは表現力が格段に違いますね。もう戻れません(*3)。
決まったプログラム描画ばかりじゃつまらないので、「各種センサーからの入力情報を処理して表示に反映させよう!」という段取りも、もはや定番です。
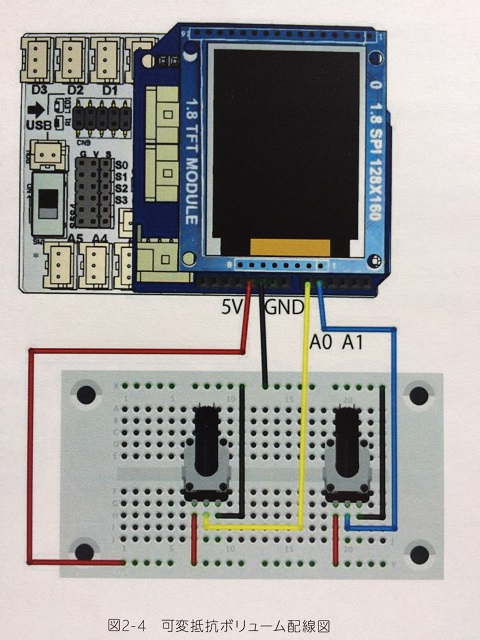
タッチセンサーやタクトスイッチ等のデジタル入力なら digitalRead()、可変抵抗ボリューム等のアナログ入力なら analogRead() で読み取れます。
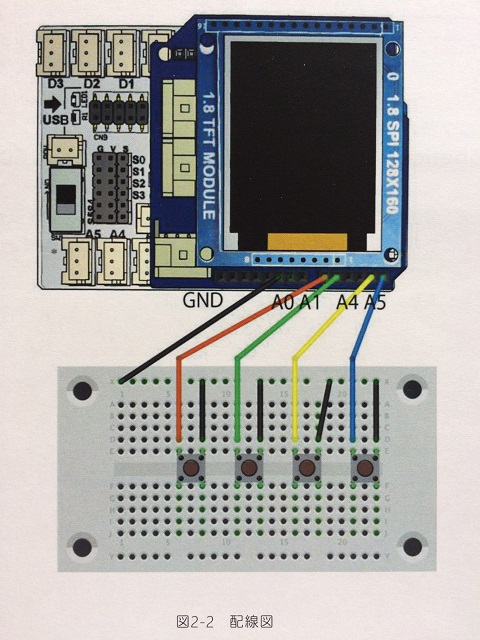
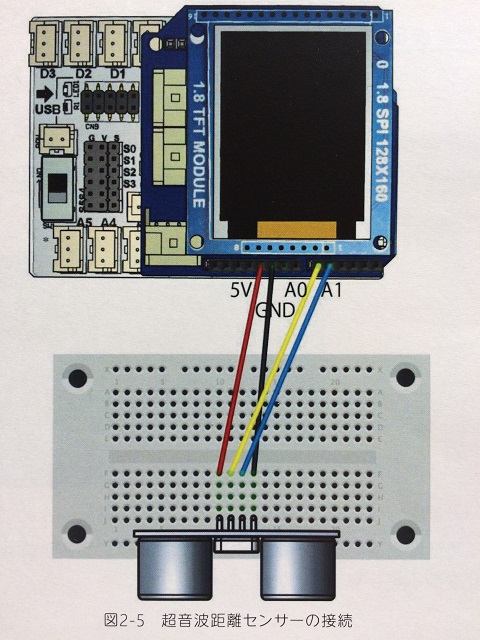
超音波距離センサーなら、便利な関数ライブラリを利用しましょう(*4)。
テレビを録画したければ、お気に入りのレコーダーの説明書を読んで使い方が分かれば良いだけで、レコーダーの構造を解析する必要はないのと同じです。
もう、ゲームが作りたくてウズウズし始めましたか? それを理解度のパラメータにしてください。
*1 背景色 TFT::background(B値,G値,R値) や線の色 TFT::stroke(B値,G値,R値) などの指定関数には、RGB各値を0~255(8ビット256通り)で指定して、24ビット1677万通りの色分けができますが、LCDの実際の能力は16ビット65,536色までのようです。
*2 Nintendoゲームボーイ 160×144ドット×2ビット(モノクロ4階調)~6ビット(56色) よりも豊かでしょう。
ゲームボーイアドバンスで 240×160ドット×15ビット(32768色)、
DSは上下画面とも256×192ドット×18ビット(26万色)、
3DS/2DSは上(下)画面 400(320)×240ドット×24ビット(1677万色) と進化しています。
*3 人間とは、そういう生き物です。幸福は、ステップを踏んで徐々に味わうのがコツなのに、いきなり最先端のスマホや3Dゲームで遊ぶ幼子(おさなご)は不憫(ふびん)です。
こうして、テクノロジーが進化し続けない限り、幸せが続かない人間生活が続くのですね…。
*4 従来、1・2年目では RPlib::ussRead() を使ってきましたが、今回は NewPing::ping_cm() を使っています。
委細(いさい)の仕事をAさんに頼むかBさんに頼むかの違いで、使い易い方を選べば良いのです。
2. 10月の課題
<スタートアップ(全コース)>
特にありません
<プレプライマリーコース> (プライマリーではありません)
- オリジナル図形プリント
https://robocobo.sakura.ne.jp/blog/HW/RobotPP2410-Q.pdf
<プライマリーコース> (難しければプレプライマリー↑でもOK)
- オリジナル図形プリント
https://robocobo.sakura.ne.jp/blog/HW/RobotP2410-Q.pdf
<ベーシックコース>
- 授業まとめを精読する(概ね3年生以上/低学年は補助の下で)
- オリジナル課題プリント(3面図+設問)
https://robocobo.sakura.ne.jp/blog/HW/RobotB2410-Q.pdf
<ミドルコース>
- 授業まとめを精読する
- オリジナル課題プリント(3面図+設問)
https://robocobo.sakura.ne.jp/blog/HW/RobotM2410-Q.pdf
<アドバンスコース>
- 授業まとめを精読する
- オリジナル課題プリント(見取図+設問)
https://robocobo.sakura.ne.jp/blog/HW/RobotA2410-Q.pdf (来月まで分)
<プロ1年目コース>
- リンクロボット製作を完了する
- 授業まとめに紹介した動画(YouTube)を視聴する
<プロ2年目コース>
- 授業まとめを精読する
<プロ3年目コース>
- 授業まとめを精読する(該当テキストページを見ながら)
-《第2回テキストp.18 やってみよう!》
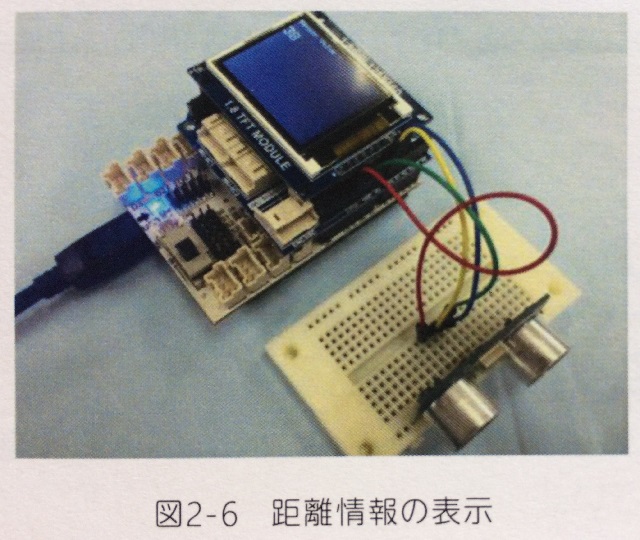
[UltrasonicLCD3/4]をベースに、超音波センサーの値に応じて大きさが変化する四角を表示する
⇒解答例 [UltrasonicLCD5]
-《第2回テキストp.18 やってみよう! 拡張》
[UltrasonicLCD5]をベースに、四角の中心(対角線の交点)を画面の中央(80,64)に固定し、アスペクト比を保った(相似形の)まま表示する
3. 9月の解答
<プレプライマリーコース>
https://robocobo.sakura.ne.jp/blog/HW/RobotPP2409-A.pdf
<プライマリーコース>
https://robocobo.sakura.ne.jp/blog/HW/RobotP2409-A.pdf
<ベーシックコース>
https://robocobo.sakura.ne.jp/blog/HW/RobotB2409-A.pdf
<ミドルコース>
https://robocobo.sakura.ne.jp/blog/HW/RobotM2409-A.pdf
<アドバンスコース>
https://robocobo.sakura.ne.jp/blog/HW/RobotA2408-A.pdf
4. 11月の授業予告
https://robocobo.sakura.ne.jp/blog/hap/robo-2411.pdf<プレプライマリーコース>『ゆらリン』… 対象者はいません
<プライマリーコース>『うおうさおう』
<ベーシックコース>『ホッピンバード』
<ミドルコース> 『アメンロボ』
<アドバンスコース>『カメラボ②』
<プロ1年目コース>『リンクロボット②』
<プロ2年目コース>『センサーロボット②』
<プロ3年目コース>『不思議アイテムIII-2②』
5. 今後の授業スケジュール
◆中間11/23(土・祝)→11/30へシフトします。
◆小倉南12/22は〔山田緑地〕で開催します。
――――――――――<佐藤教室長>――――――――――
[東福間]第1・3土原則<学習ルームでこぼこ>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドバンス
⇒ 11/2, 16, 12/7, 21, 1/4, 18
[東福間プロ]第2・4日原則<学習ルームでこぼこ>
- 10:00~ プロ1年目
- 13:00~ プロ2年目
- 16:00~ プロ3年目
⇒ 11/10, 24, 12/8, 22, 1/12, 26
[中間]第2・4土原則<ハピネスなかま別館>
- 15:30~ ミドル(/ベーシック/プライマリ振替)
- 17:30~ アドバンス
⇒11/ 9 第1回 ハピネスなかま別館1F 工芸実習室
11/30※第2回 ハピネスなかま別館1F 研修室2B
12/14, 28
※11/23(土・祝)はハピネスなかま休館日につき11/30へシフトします
(アドバンス~11月/ミドル~12月 終了)
[小倉北]第1・3日原則<ムーブ>
- 10:30~ ベーシック/プライマリ
- 13:00~ ミドル
- 15:00~ アドバンス
- 12:30~ プロ1・2年目
- 15:00~ プロ3年目
⇒11/ 3 第1回 5F企画ルーム1・2
11/17 第2回 5F企画ルーム1・2
12/1, 15, 1/5, 19
――――――――――<中野教室長>――――――――――
[八幡東]第1・3土原則<レインボープラザ4F>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドバンス
⇒ 11/2, 16, 12/7, 21, 1/4, 18
[小倉南]第2・4日原則<総合農事センター2F>
- 10:30~ ベーシック/プライマリ
- 13:00~ ミドル
- 15:00~ アドバンス
⇒ 11/10, 24, 12/8, 22※, 1/12, 26
※12/22は農事センター利用不可につき〔山田緑地〕で開催します
6. お知らせ
1) 新「えんぴつピアノ」電子工作講座 11/23(土・祝)
🎅今年のクリスマスソングは一味ちがった自作楽器で奏でてみては❓
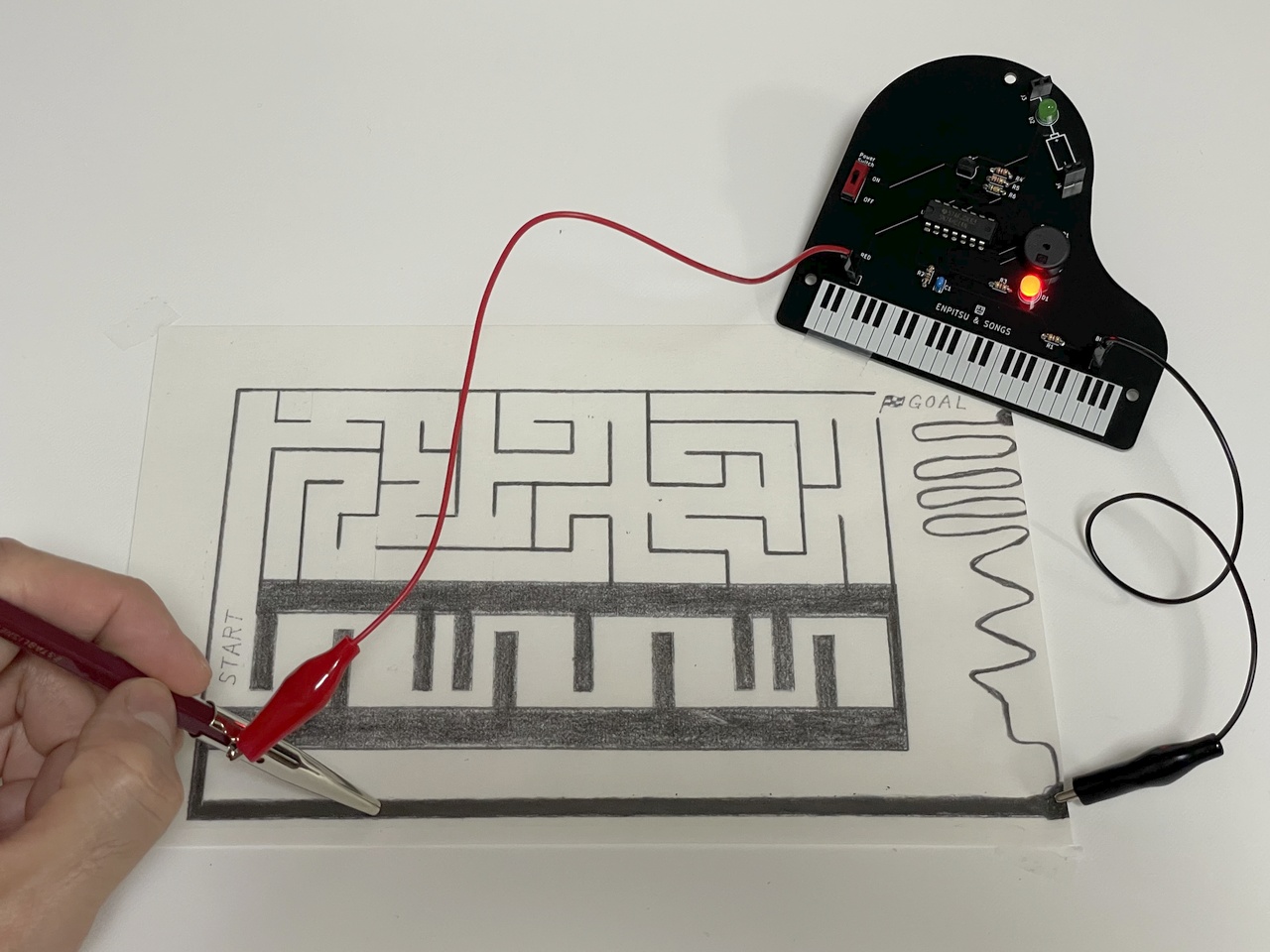
鉛筆✏で描いたピアノ鍵盤🎹で演奏できるオリジナル電子工作です。
紙に描いたパターンに電気を流すことで楽器🥁になったり、迷路ゲーム👾になったり、水分センサー💧になったりと、意外な電子回路を作って遊びます。
基板をピアノ型にした旧「RCドレミ」リニューアル版、12組限定です❣
練習編もありますので、初めてのはんだ付けでも安心してご参加ください。
【チラシ(配布しません)】
https://robocobo.sakura.ne.jp/blog/lab/RCdoremi-2024.pdf
【講座名】
オリジナル電子工作『新 えんぴつピアノ はんだ付け講座』
【内容】
はんだこてを使って、電子部品やICのはんだ付け作業を練習した後、
身近な物をオルガン鍵盤にしてしまうガジェットを製作して遊びます。
【講師】中野・佐藤
【会場】北九州パレス(勤労青少年文化センター) 2F 写真室
【時間】11/23(土・祝)
A) 10:00~10:50 (50分) はんだ付け練習
B) 11:00~12:00 (60分) はんだ付け本番
‐ 12:00~13:00 昼休み
C) 13:00~14:30 (90分) けんばん工作&演奏
【対象】ロボット教室生・お友達 小3~高校生 12組(ご家族2名まで同伴可)
【参加料】
A) ~ C) 7,700円(受講料5,830+材料費1,320+はんだセットレンタル代550)
B) & C) 6,600円(受講料4,950+材料費1,100+はんだセットレンタル代550)
C) のみ 4,400円(受講料3,300+材料費1,100)
【申込方法】メールにてお申込み下さい。11/9〆切・先着順です。
【申込条件】
- 原則として、最少催行人数4名とし、11/13に開催決定させて頂きます。
- 原則として、12月お引落し額(1月分)に加算して徴収させて頂きます。
キャンセル・欠席により空席が発生した場合は返金できません。
(キットと製作テキストのみお渡しします)
2) 11月景品交換会
3ヶ月毎の宿題ポイント交換会を下記授業日に開催します。
ポイントカードを忘れずに、早めに来て下さい。
[東福間]11/16
[八幡東]11/16
[小倉北]11/17
[小倉南]11/24
[中 間]11/30
3) 9月課題 高得点者 []内は教室と学年
◆プライマリ【6名平均 図形3.8】
5点…中野[東福間2], 橋村[小倉北3]
◆ベーシック【9名平均 図面2.7+設問1.8=4.4】
10点…なし
9点…なし
8点…井上[小倉南4]
7点…なし
6点…なし
◆ミドル【8名平均 図面2.9+設問2.5=5.4】
10点…なし
9点…なし
8点…染森[東福間4]
7点…亀平[八幡東3], 原[小倉南5]
◆アドバンス
15点…藤津[中間8]
東福間・中間・小倉北教室 佐藤 / 八幡東・小倉南教室 中野