2.今月の課題
3.今後の授業スケジュール
4.お知らせ
1. 7月授業内容
1.0 <スタートアップ>
割愛します。

1.1 <プライマリーコース『ウッシーくん』>
割愛します。
1.2 <ベーシックコース『横綱ロボ』>
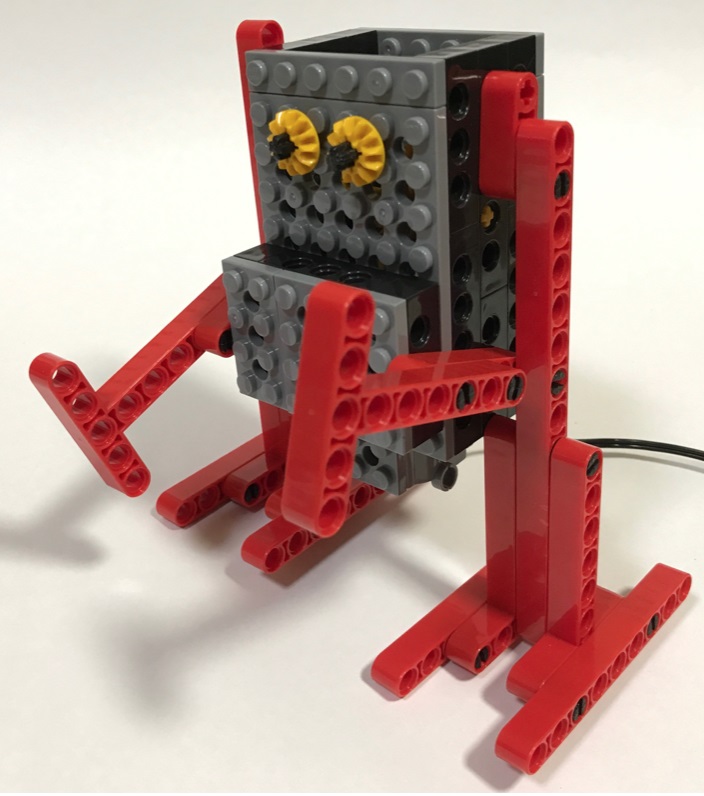
力士ロボットです。1日目で基本形の製作は完了するものの、足を運ぶ度(たび)にヨタヨタと左右に上体を揺(ゆ)らし、足裏はツルツルと滑ります。
まるで慣(な)れないスケートリンクで立ち往生する初心者のような、何とも頼りない横綱です。

2日目にはシャフトを通して足幅(あしはば)を広げ、輪ゴムやグロメット(ゴム管)で摩擦力を稼(かせ)ぎ、ようやく大地を掴(つか)んで歩む勇(いさ)ましさが出てきました。
途中、重たいモーターを低い位置に取り付けた基本設計を変え、脚(あし)をひょろ長くして重心を高くしてみましたが、
背が高くなって貫禄(かんろく)は上がるものの、転びやすくなって、相撲取りに大事な安定感はいまいちとなることも試しました。
力士が腰を低くして取り組むのも、重心を下げて倒れにくくするためですね。
2日目最後の競技は、当然、相撲試合です!
土俵(どひょう)の上で両者をにらみ合わせ、「はっけよーい、のこった!」
どれも似たような動きしかしていないように見えて、いざ取り組ませると、ロボットの実力差が現れました。
テキストや先生の話をヒントに改良したロボットが強い結果を残す一方、
弱々しい力士は、バランスが悪くて勝手に転ぶか、足がツルツルですぐに相手に押し出されていました。
見た目の飾り付けに気を取られ、太い眉(まゆ)を付けて“目力”を上げたり、立派なちょんまげを結(ゆ)っても強くはならなかったね。
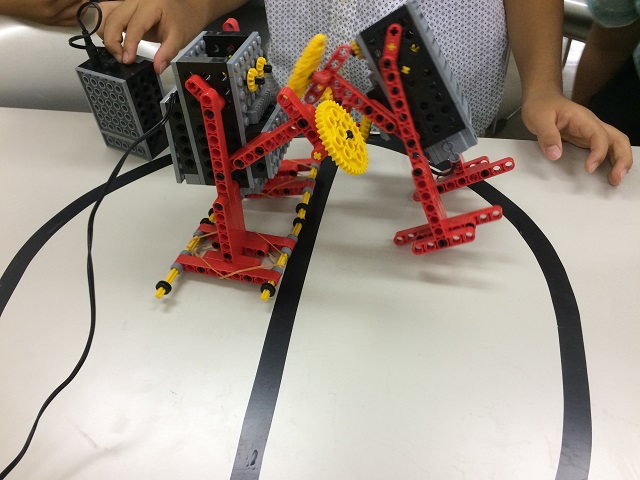
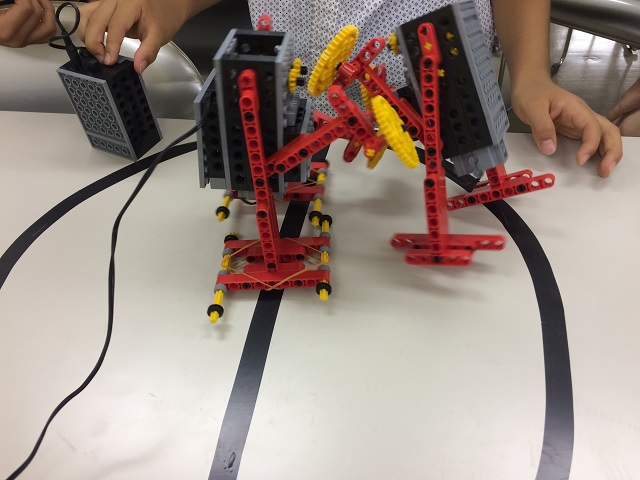
1.3 <ミドルコース『ロボベーター』>
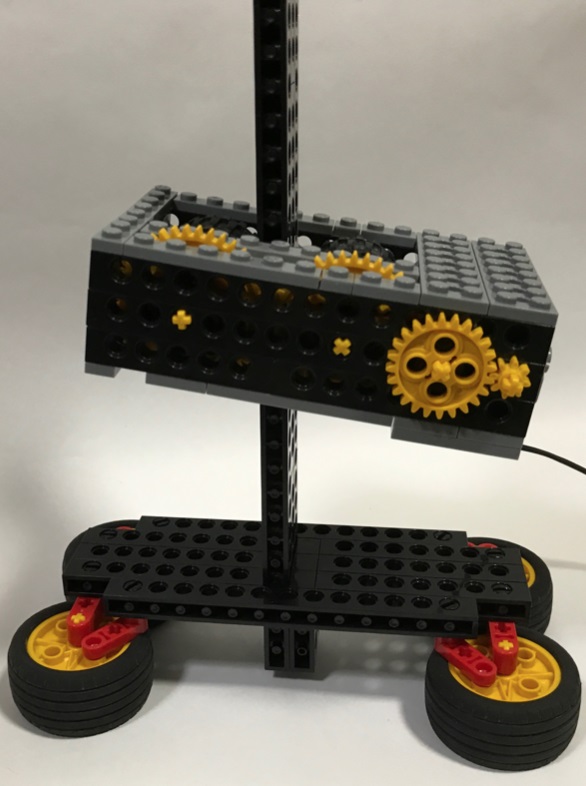
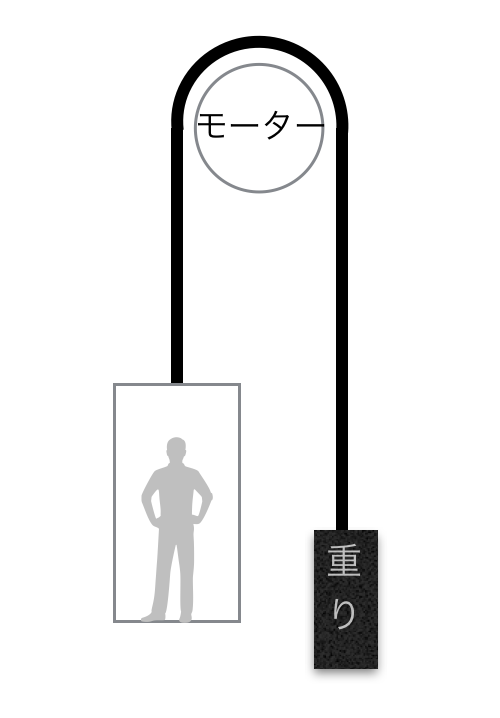
今回はエレベーター!
時々登場する「ロボットというよりも…」シリーズで、毎回とても面白く感動モノです。
製作難易度は高くなく、学習ポイントもさほど高度ではないのですが、
このキットでエレベーターを考案し、アイデアコンテスト全国大会で最優秀賞を獲得した当時小学4年生のアイデアに脱帽です。
見た目としては、エレベーターのかご(運動部位)が水平から少し傾いてしまいますが、
このことにより、駆動ローラー(タイヤ)をレール柱に押し付け、滑らないように摩擦力を稼(かせ)ぐことができるのです。
このために、かごの重心を一方(モーター搭載側)に偏(かたよ)らせているとも言えます。
かごの重心バランス次第で、好みの摩擦力に調整できるということでもあります。
実際のエレベーターとは方式が異なることも学習しましたが、それは知識であって、実物を模(も)さないことで何より大事な創造力をいかんなく発揮したことが推し量れます。

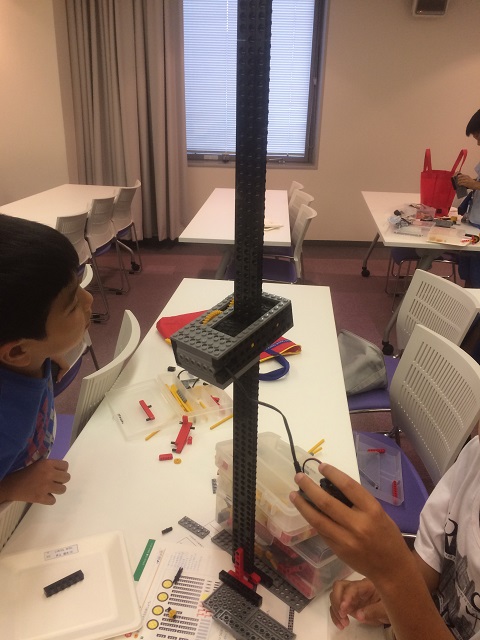
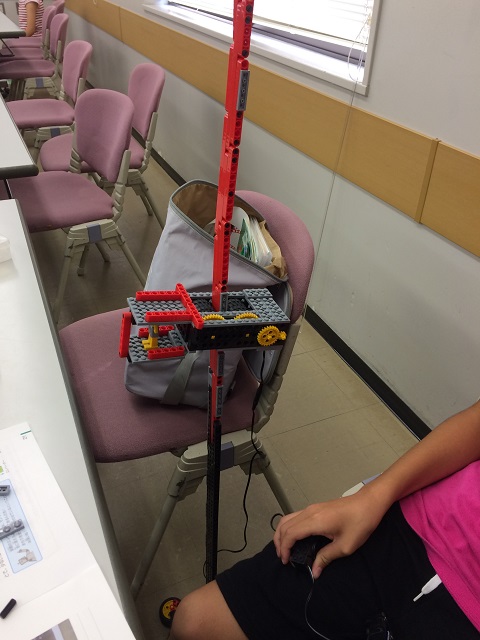
1日目では、下降し終えて底に着いてもモーターは唸(うな)りを上げたままになり、上昇し終えると柱から外れて落下するという“恐怖のエレベーター”!
実物なら絶対に乗りたくありません。

2日目でようやく、タッチセンサーの働きにより、地上でも頂上でも自動停止する安心エレベーターになりました。
実物でも、年を追うごとにセンサー類が多くなって安全性が高まっています。

最後の競技は、一部で品評会としました。その前に、プレゼン(テーション)ですね。
各自で改造や装飾をしたロボベーターの動作を見せ、機能や工夫点をアピールしてもらいます。
皆さん、発表に慣(な)れていないようです。
せっかく和気あいあいと面白い改造に勤(いそ)しんでいても、このような段になると急に押し黙ること!
「特にないです」「いや、普通に…」って、そんな筈(はず)はありません。

確かに、テキスト通りに製作しているだけでは、それが最終目的になって、随所にある工夫点に気付かない面があります。
オリジナルの設計を疑問に感じて、改変して、失敗して、成功して、新たな知見を築いていって欲しいと思います。
1.4 <アドバンスコース『ロボエレファン』/『テクニカルコンテスト予選』>
1ヶ月目の授業です。
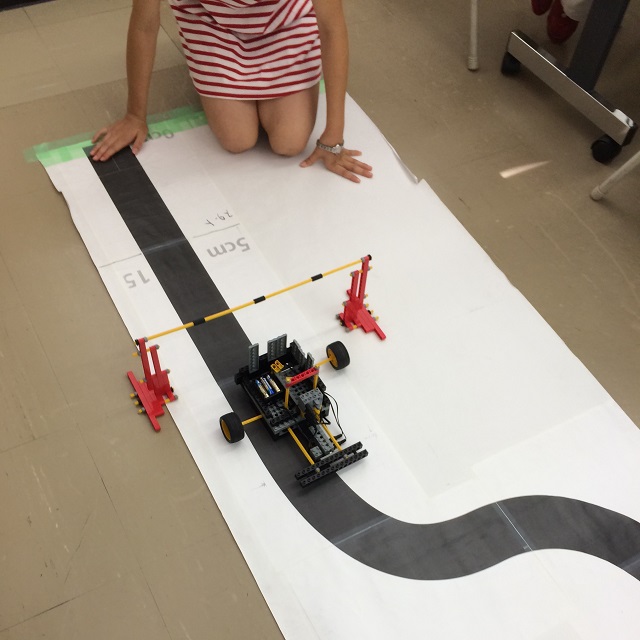
2ヶ月目にかけて、ボール前で自動停止し、音に反応してシュートするPK戦に持ち込みますが、1日目は、先ず、黒ライン(の縁)を辿(たど)る基本形ロボットを製作しました。
前面でボールをドリブルさせるように、回転ブラシのようなメカを組み付けていますが、ロボット本体は、ちょうど間もなくテクニカルコンテスト予選で競うライントレーサそのものです。
進路を黒ラインに決められたロボットでドリブルがうまくいく筈もなく、2日目は、手元のリモコンスイッチによる手動操縦型に作り変えてサッカー対戦する流れですが、
コンテスト予選を前にライントレーサを壊すのも忍びなく、サッカーロボの続きは2ヶ月目に集約し、予行・研究会も別途設定して、ライントレーサの改良に集中することにしました。
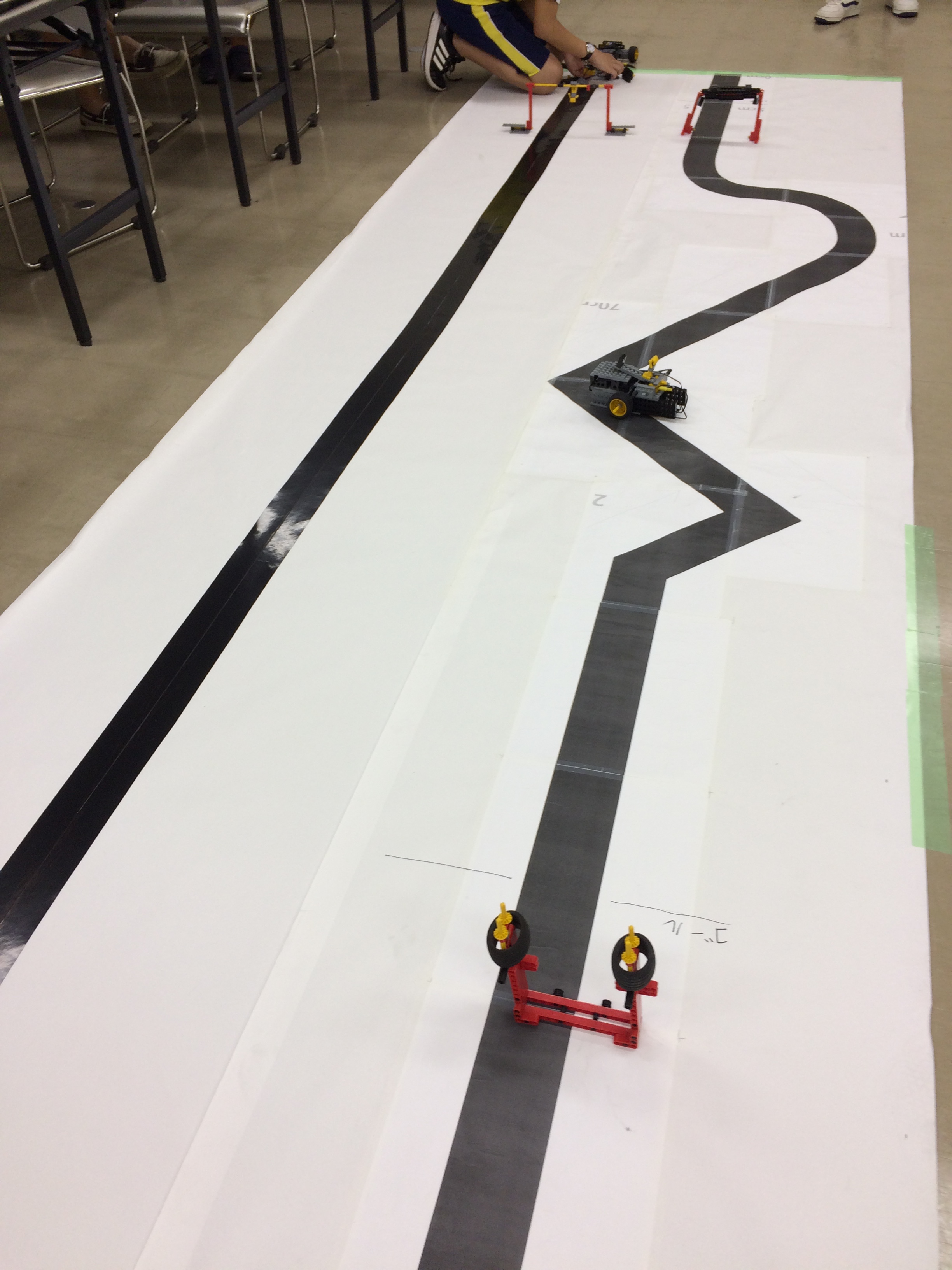
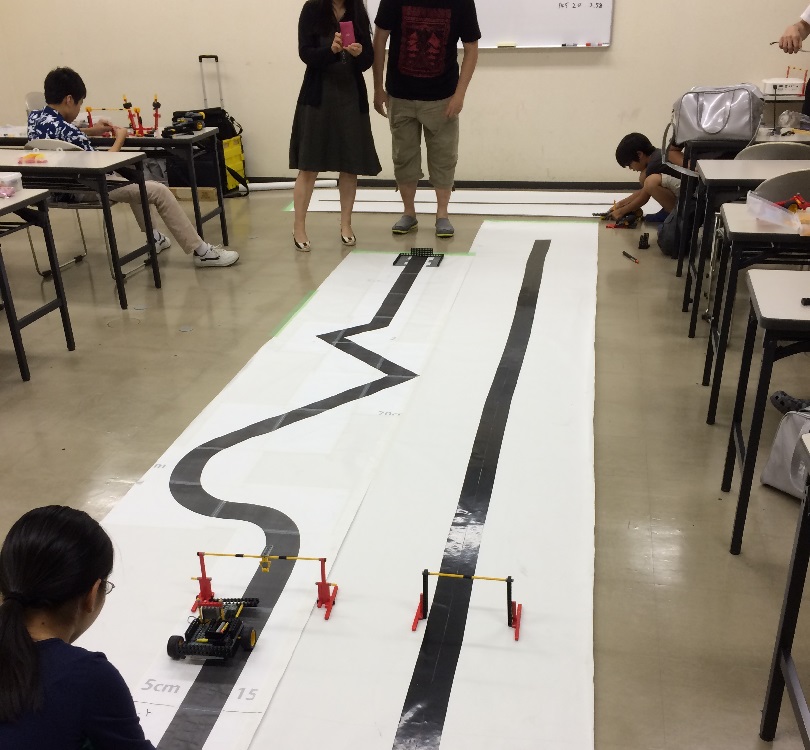
コンビニと教室のプリンタで、1/1スケールの模擬コース(4.3メートル!)を2枚用意したものの、教室で印刷した黒ラインの赤外線反射率が高いようで、光センサーがうまく黒判定してくれません(*1)。
教室で印刷した方がより黒く見えるのに…です。人間の目とは違って見える世界(*2)は予測がつきません。
他教室の予行結果で、7秒を切るタイムが出ているとの情報が7/19に入りました。我らが教室連合では、10秒を切れば速い方です。
いや、スピードアップ自体は簡単なのですが、曲がり切れず脱線したり、曲がり過ぎて無駄にスピンしたり、最悪180°ターンして逆走してしまうのです。
下記が鍵となりそうです。
1) 軽量化…機敏な加速や方向転換に、慣性質量を小さく
2) 旋回性…重量物を旋回軸(≒駆動輪)付近に集め、慣性モーメントを小さく
3) 保守性…電池交換、左右タイヤ距離(トレッド)変更、光センサーの位置・感度調整
4) 堅牢性…誤って衝撃を受けても分解し難い構造
とは言え、事は複雑で、これらのバランスが大事です。
最適解は試行錯誤に頼らざるを得ない面と、成否の再現性が高くない(運頼みの)面が大きいのも泣き所です。
それでも、速いロボットと遅いロボットとの差というのも厳然としてありますので、データを蓄積しながら、科学的思考でマシンの限界性能を追求した者が勝つという、エンジニアリングの一面も体験します。
ここから、九州地区予選の戦況を記します。
7/25(火) 11:30、アクロス福岡 円形ホールに入場。
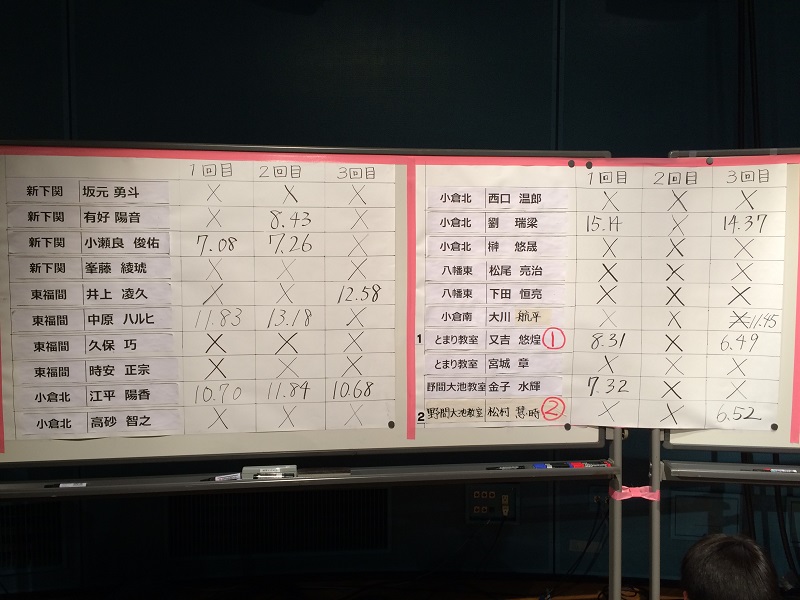
全国大会2名進出の枠をかけて、7教室(新下関・東福間・八幡東・小倉北・小倉南・野間大池・とまり)から20名がエントリー。
大勢の家族が見守る中、12:00まで練習走行を重ねます。
脱線したり、コーナーで無用にぐるぐるターンを繰り返したり、途中で引き返してしまったり…、
本番コースの黒ラインに光センサー(感度およびステアリング応答)を適応させるのに皆が苦心していました。
それは、本番中も変わらず。
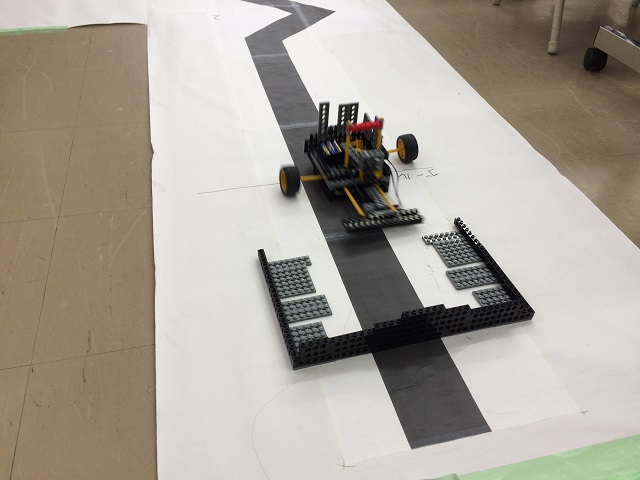
加えて、今年のレギュレーションは、
●スタート後に外部からパイロットを取り込むこと
●ゴール後に3秒以上自動停止すること
の2点が課され、コースアウトすることなく、これらをクリアしなければなりません。
12:15、予選開始。我らが教室連合からは12名エントリーで過半数(*3)、数打てば当たる戦略(?)も振るわず、結果は惨敗(失格を除く10名中6~10位)でした。
完走したマシンは、一言で言えば“遅い”のです。
重さや摩擦が仇(あだ)になった例もありました(*4)。
また、“余裕たっぷり安定して”ラインを辿(たど)るのは、もったいないことです。
スピードを上げれば別の課題が見えてきます。与えられた3回とも完走するような安定志向では甘いと言えます(*5)。
3回ともコースアウトやレギュレーション失格でリタイアしたマシンも10台(当教室連合では7/12台)と半数を占め、本番の難しさを物語りましたが、
調整やシミュレーション不足の面も否めないのは自他共に認めるところでしょう(*6)。
様々なマシンを観察した結果と、科学的考察が合致して分かってきましたが、
トレッド(左右タイヤ距離)と光センサー位置(駆動軸からの距離)について、
◆遅いが脱線し難い安定マシン … トレッド長め・光センサー近め(旋回性・ふらつき↑)
◆速いが脱線し易い挑戦マシン … トレッド短め・光センサー遠め(旋回性・ふらつき↓)
の傾向が出ますので、自他のマシンをビデオで比べる等、省(かえり)みてみましょう。
教室としても、まだまだ、大いに勉強・反省すべき点を残す結果となりました。
来年以降も挑戦し、強豪教室に成長して参ります。
<記録>
・1位 … 6.49秒[とまり教室]
・2位 … 6.52秒[野間大池教室]
・6~10位 … 10.68~14.37秒[東福間・小倉北・小倉南教室]
*1 コンビニはレーザー式、教室はインクジェット式という違いがありますが、一般的な傾向として、黒インクがダメなのかどうかは不明です。
3色カラーを重ねて印刷すれば真の“黒”になる(減法混色)かもしれませんが、ただでさえ高価なカラーインクを浪費して失敗する可能性も拭(ぬぐ)えません…。
*2 赤外線カメラがあれば見えたでしょう。
*3 参加人数の多さこそ、大会への多大な貢献であり、価値ある教室の指標です!と断言できます。皆様の温かいご協力に心から感謝します。
*4 中には、スタート地点のパイロット取り込み用ゲートをなぎ倒してゴールまで引き摺ったマシンも…。それはタイムに響きますね。
*5 しかし、予選で3回とも完走した唯一のマシンが5名(6~10位)中で最速であり、かつ再現性も高く、安定志向の真面目さが着実な結果に表れた感です。
*6 勿論、教室側としても、もっと入念なヒントやコース環境を提供できれば、また違った結果を生んだものと省みます。
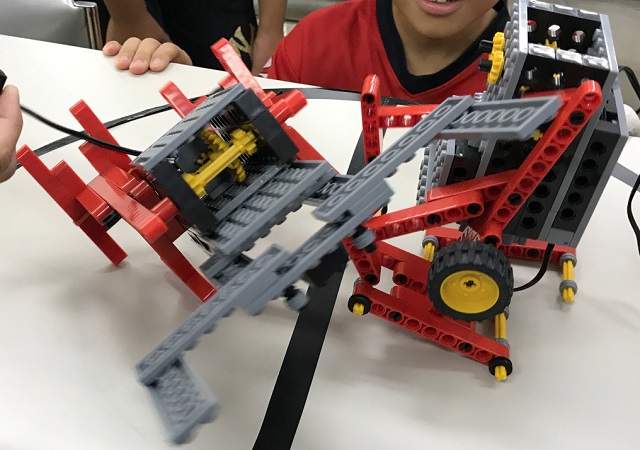
1.5 <プロ2年目コース『アームロボット』>
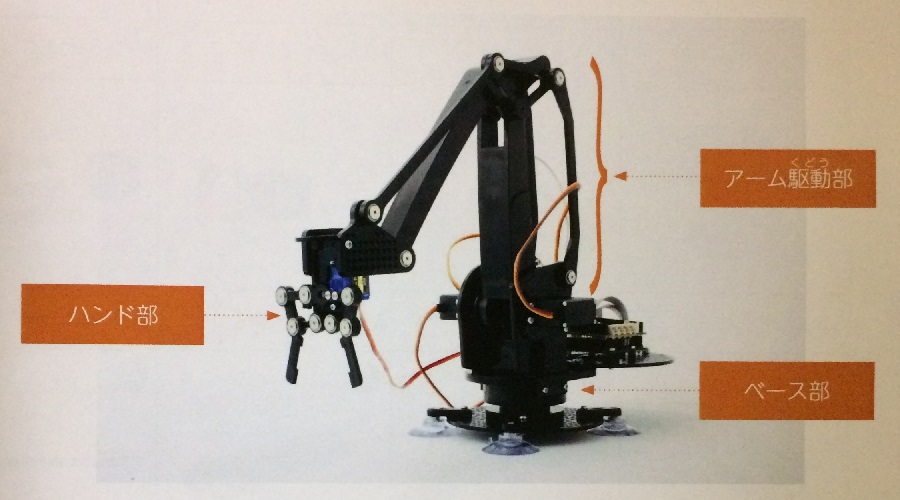
2年目の生徒さんお待ちかね、アームロボットの登場です。
人間の腕のように、複数の関節を曲げて、手先の位置と開閉を自在に操ります(*1)。
自動車の組み立てラインなどで活躍していますね。
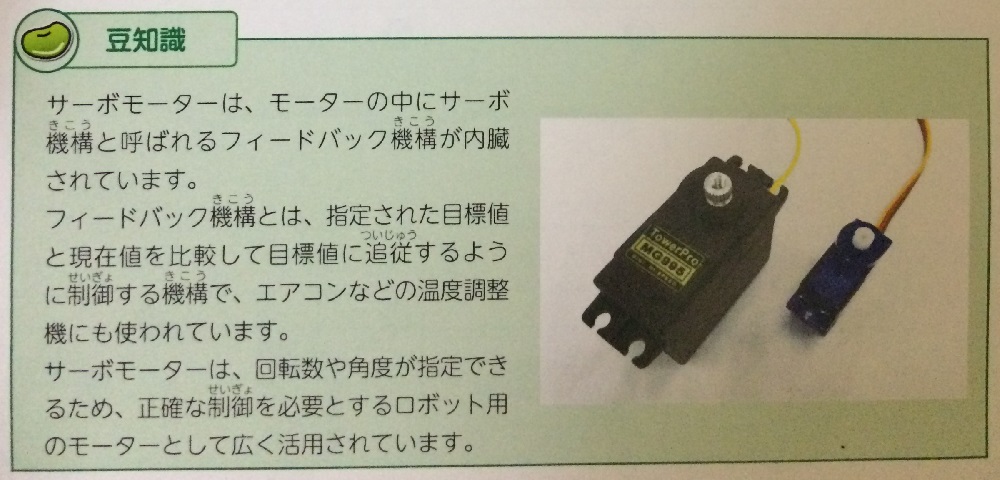
関節の動き(回転)を司るのは、やはりモーターです。
それも、所望の角度分だけサッと回転してピタッと止まれる、サーボモーターの出番です(*2)。
サーボモーターは、民生品では、CD/DVDのトラッキング(*3)や、ラジコン飛行機のエンジンスロットル・フラップの開閉などに使われています。
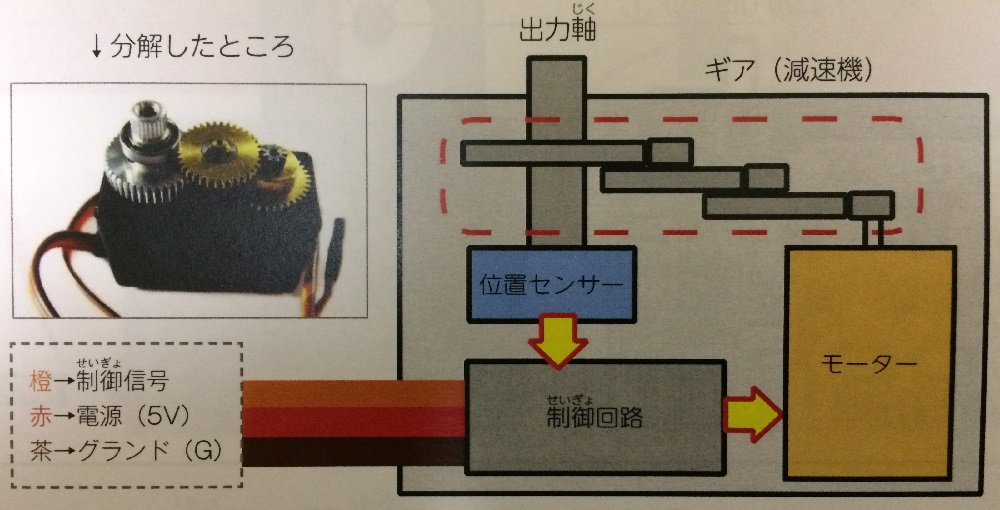
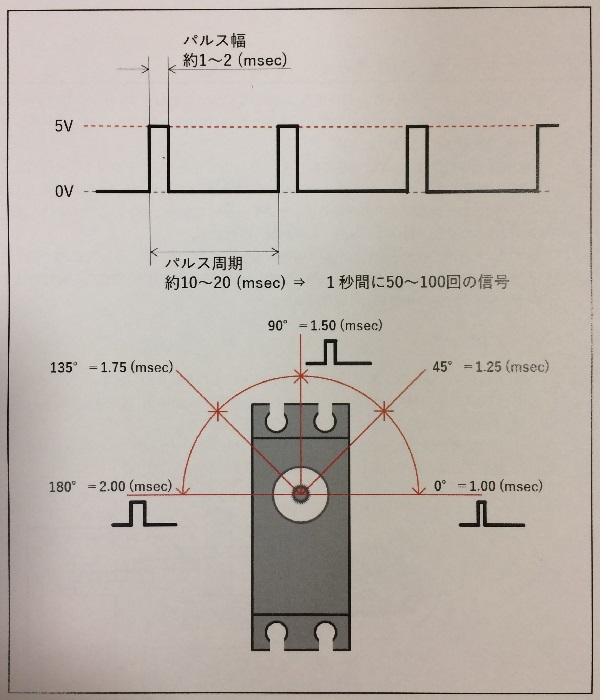
サーボモーターには、電源線2本と、目標の位置(回転角)を伝える制御信号線の、計3本が伸びています。
小型ロボット・ホビー用として一般的なサーボモーターの信号線には、回転角に応じたパルス幅 1~2ミリ秒で、50~100HzのPWM矩形波(くけいは)(*4)を与えます。
このサーボモーターは、指示された位置まで全力で回転し、行き過ぎると全力で戻ろうとし、または、
これを小刻みに繰り返して振動(ハンチング)することもあり、瞬発的な電力を消費しますので、別途ACアダプターで電源を供給しました。
高負荷(手で止めたり)や連続で動作させた場合の発熱にも注意が必要です。
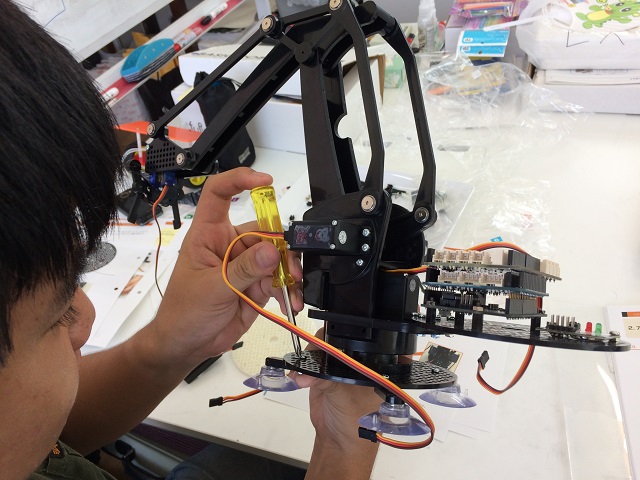
また、原点位置から±90°と可動域が決まっていますので、初期位置に注意して、組み付けていきます。
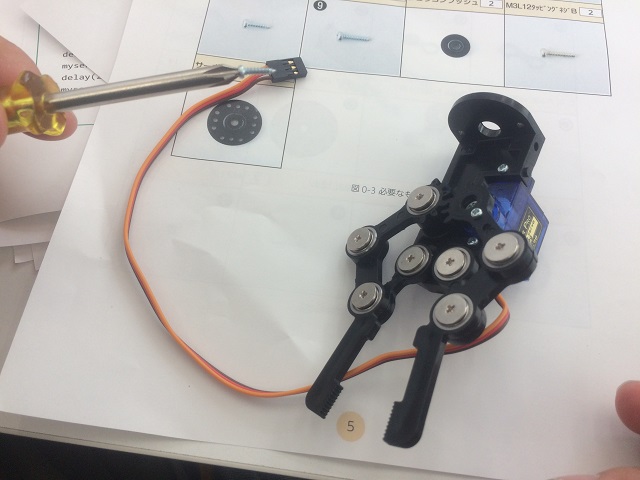
2回とも時間の大半を製作に当て、アーム部の開閉に2個、ベース部の旋回に1個のサーボモーターと、ハンド部の開閉にマイクロサーボモーター1個の、計4個のサーボモーターを備える本格派の完成です。
無線コントローラー(ゲームパッド)で各関節を操作するプログラムが、ハサミ(グラップル)付きパワーショベルのように、アーム・ハンドの開閉を簡単にさせてくれます。
次回は、このアームロボットの制御方法について、解明していきます。
*1 手首の関節が無いので、手先の向き(ネジ回し等に必要)は変えられません。
*2 普通のモーターと、回転部に備え付けたエンコーダ(符号化装置)で回転数や角度を検出して、マイコン(プログラム)で制御する方法もありますが、
制御のスピードや精度が要求される用途では、通例、これら(モーター+エンコーダ+制御回路)をパッケージングしたサーボモーターを使います。
*3 CD/DVDのデータ記録ピット(微細な凹凸)は、うずまき状(ブレあり)に並んでおり、再生中レーザースポットを内周から外周へ移動・追従させ続けるトラッキングサーボが必要です。
加えて、盤面の歪みに応じて上下動し、レーザー焦点を合わせ続けるフォーカシングサーボも必要です。
*4 一周期ごとに、ONとOFFの時間の比(デューティー比)を変えることでアナログ量を表す、デジタルパルス波形のこと。
2. 今月の課題
全国大会への取り組みを奨励し、7月の図面・設問プリントは休止しました。<スタートアップ>
特にありません
<プライマリーコース>
- 特にありません
<ベーシックコース>
- 上記授業内容を精読する(概ね3年生以上/低学年は補助の下で)
<ミドルコース>
- 上記授業内容を精読する
<アドバンスコース>
- 上記授業内容を精読する
<プロ2年目コース>
- 上記授業内容を精読する(該当テキストページを見ながら)
- アームロボットを完成させる
3. 今後の授業スケジュール
8/13(日)を休む為、東福間プロ・小倉北・南教室の8月第1回は一週前倒しになります。
日付の()は臨時、!は原則外、?は予定の意です。
――――――――――【佐藤教室長】――――――――――
[東福間]第1・3土原則
- 10:30~ ミドル/アドバンス
- 13:30~ ベーシック/プライマリ
(- 15:30~ ミドル/アドバンス振替)
・8/5, 19, 9/2, 16, 10/7, 21
[東福間プロ]第2・4日原則
- 12:45~ プロ2年目
- 15:30~ プロ3年目
・8/6!, 27, 9/10, 24, 10/8, 22
[中間]第2・4土原則<なかまハーモニーホール>
- 13:30~ ベーシック/プライマリ
- 15:15~ ミドル(/アドバンス振替)
・8/12 第1回 3F会議室2
・8/26 第2回 3F会議室2
・9/9, 23, 10/14※, 28
※10/14はハーモニーホール利用不可の為、代替施設(未定)で開催します。
[小倉北]第1・3日原則<ムーブ>
- 10:00~ ベーシック/プライマリ
- 13:00~ ミドル
- 15:00~ アドバンス/ベーシック第2部
・7/30! 第1回 5F小セミ
・8/20 第2回 5F小セミ
・9/3, 17, 10/1, 15
――――――――――【菅本教室長】――――――――――
[とばた]第2・4土原則<ウェルとばた8F>
- 13:00~ 全コース(プロを除く)
・8/12, 26, 9/9, 23, 10/14, 28
――――――――――【中野教室長】――――――――――
[八幡東]第1・3土原則<レインボープラザ4F>
- 13:30~ ベーシック
- 15:30~ ミドル
- 17:30~ アドバンス
・8/5, 19, 9/2, 16, 10/7, 21
[小倉南]第2・4日原則<総合農事センター2F>
- 10:30~ ベーシック/プライマリ
- 13:00~ ミドル /アドバンス
・8/6!, 27, 9/10, 24, 10/8, 22
4. お知らせ
1) ロボット教室 九州地区大会
7/25(火)アクロス福岡 円形ホールで開催されました。
福岡の他、山口・宮崎・鹿児島・沖縄各県の教室からも参加があり、130名を超える観覧の中、
ライントレーサによるスピード競技や、創作ロボットの発表、高橋智隆氏のユーモラスな講演と写真撮影・サイン会が続き、盛況でした。
来年はもっと盛り上がるでしょうし、当教室としても取り組みを強化して参ります。
出場者の皆さん、お疲れ様でした。
【テクニカルコンテスト部門】
[東福間]井上さん・中原さん・久保さん・時安さん
[八幡東]下田さん・松尾さん
[小倉北]江平さん・高砂さん・西口さん・劉さん・榊さん
[小倉南]大川さん
【アイデアコンテスト部門】
[中 間]B…大塚さん
[八幡東]A…下田さん B…正元さん
[小倉北]M…吉廣さん
[小倉南]M…辻さん・吉良さん B…波多さん
ライントレーサ部門は、全国大会出場(上位2/20名)ならず残念でしたが、
引き続き、アイデア部門の審査結果(発表期日8/10)に期待します。
地区大会の様子を動画で撮影しておりますので、研究用に活用下さい。
下記URLからダウンロードしてご覧下さい。
https://www.dropbox.com/sh/kcavowteth52ekg/AACzHWyDN4Zf8fnoTMkdMeE1a?dl=0
2) ロボプロ全国大会 開催決定
ロボティクスプロフェッサーコース全国大会(仮称)を開催することが決定しました。
大会の概要・実施競技などの詳細は別途ご報告します。
第1回 ロボティクスプロフェッサーコース全国大会
in 千葉工業大学スカイツリータウンキャンパス
2017年12月2日(土) 開催決定!
3)【洩れ訂正】5月課題 高得点者 []内は教室と学年
◆プライマリ【4名平均 図面5.0】
5点…廣渡[東福間1], 河原[中間1], 渡邉[中間1], 村田[小倉北 年長]
◆ベーシック【33名平均 図面3.2+設問3.2=6.4】
10点…桑村[中間3], 谷川[八幡東4], 橋本[小倉北3]
9点…佐藤[東福間4]
8点…川村[中間4], 宮尾[八幡東4], 荒木[小倉北3], 宮田[小倉北4], 荻山[小倉南3], 波多[小倉南4]
◆ミドル【12名平均 図面4.0+設問2.9=6.9】
10点…吉良[小倉南6]
9点…田中[東福間5]
8点…岩熊[中間6], 山本[中間5], 劉[小倉北7], 辻[小倉南6]
4) 6月課題 高得点者 []内は教室と学年
◆プライマリ【4名平均 図面5.0】
5点…廣渡[東福間1], 河原[中間1], 渡邉[中間1], 村田[小倉北 年長]
◆ベーシック【32名平均 図面3.2+設問2.9=6.1】
10点…宮尾[八幡東4]
9点…佐藤[東福間4], 森崎[八幡東2], 原[小倉北4]
8点…川村[中間4], 荒木[小倉北3], 空閑[小倉南2], 塚野[小倉南2], 波多[小倉南4]
◆ミドル【10名平均 図面3.9+設問1.7=5.6】
10点…なし
9点…なし
8点…山本[中間5], 吉良[小倉南6]
7点…辻[小倉南6]
《景品の製作ページ》
http://robocobo.blogspot.com/
東福間・中間・小倉北教室 佐藤 / 八幡東・小倉南教室 中野