2.7月の課題
3.6月の解答
4.今後の授業スケジュール
5.お知らせ
1. 7月授業内容
1.0 <スタートアップ(全コース)>
割愛します。
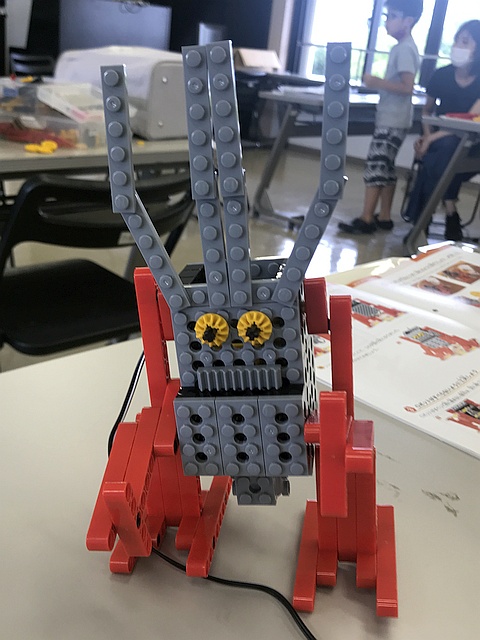
1.1 <プライマリーコース『ウッシーくん』>
割愛します。

1.2 <ベーシックコース『横綱ロボ』>
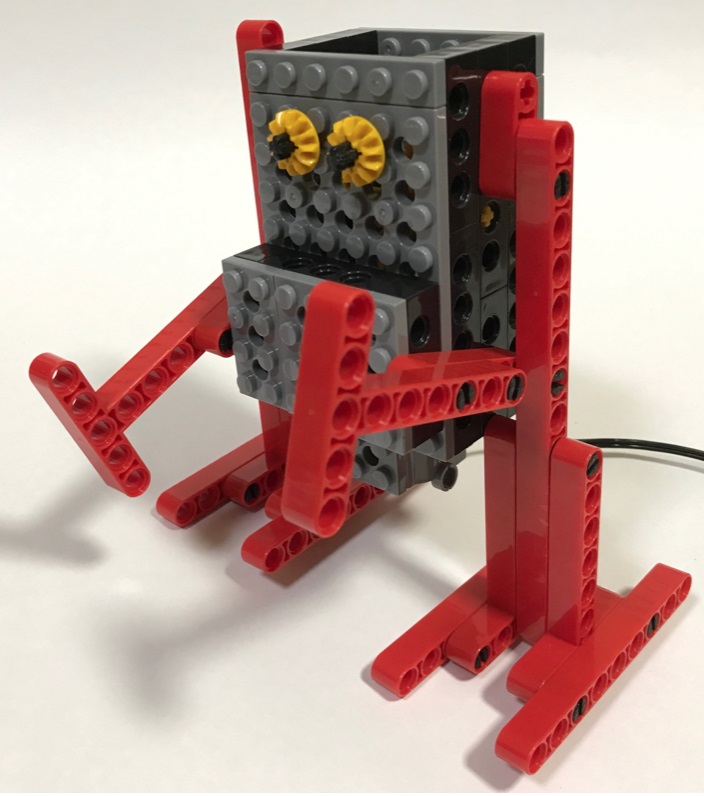
力士ロボットです。1日目で基本形の製作は完了するものの、足を運ぶ度(たび)にヨタヨタと左右に上体を揺(ゆ)らし、足裏はツルツルと滑ります。
まるで慣(な)れないスケートリンクで立ち往生(おうじょう)する初心者のような、何とも頼りない横綱です。
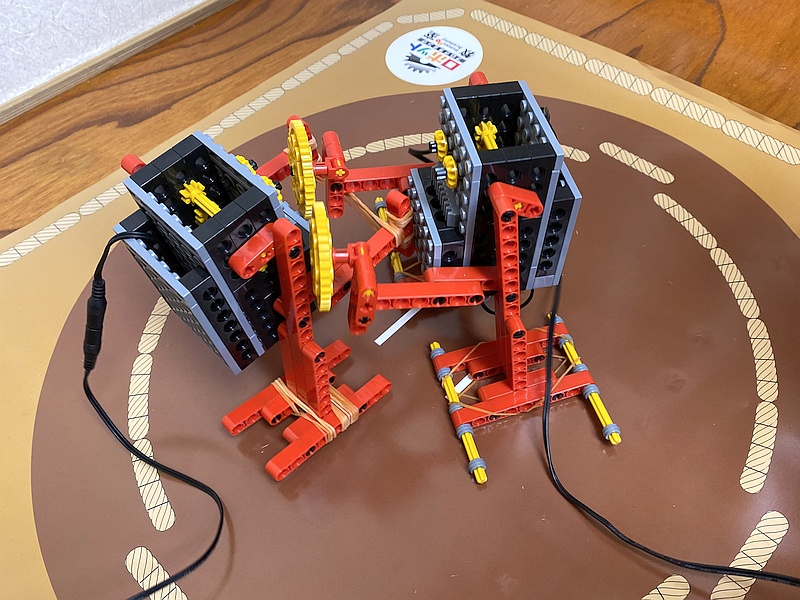
 2日目にはシャフトを通して足幅(あしはば)を広げ、輪ゴムやグロメット(ゴム管)で摩擦(まさつ)力を稼(かせ)ぎ、ようやく大地を掴(つか)んで歩む勇(いさ)ましさが出てきました。
2日目にはシャフトを通して足幅(あしはば)を広げ、輪ゴムやグロメット(ゴム管)で摩擦(まさつ)力を稼(かせ)ぎ、ようやく大地を掴(つか)んで歩む勇(いさ)ましさが出てきました。途中、重たいモーターを低い位置に取り付けた基本設計を変え、脚(あし)をひょろ長くして重心を高くしてみましたが、
背が高くなって貫禄(かんろく)は上がるものの、転びやすくなって、相撲取りに大事な安定感はいまいちとなることも試しました。
力士が腰(こし)を低くして取り組むのも、重心を下げて倒れにくくするためですね。
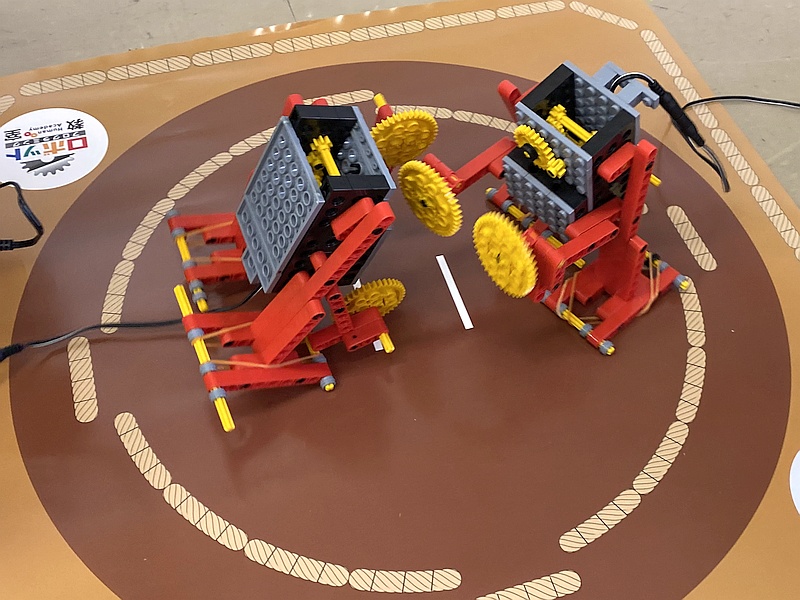
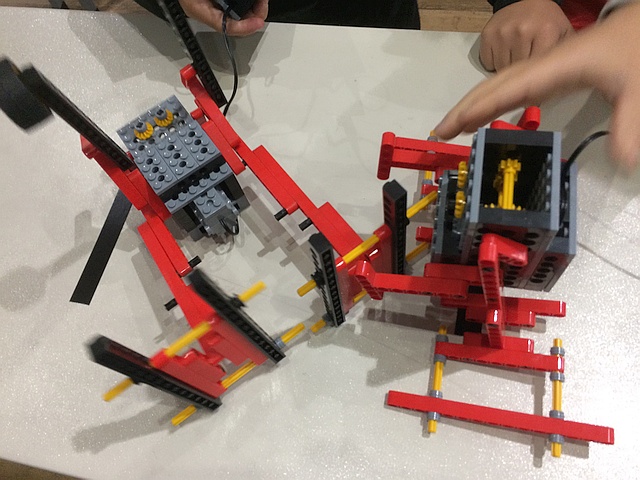
 2日目最後の競技は、当然、相撲試合です!
2日目最後の競技は、当然、相撲試合です!土俵(どひょう)の上で両者をにらみ合わせ、「はっけよーい、のこった!」
どれも似たような動きしかしていないように見えて、いざ取り組ませると、ロボットの実力差が現れました。
テキストや先生の話をヒントに改良したロボットが強い結果を残す一方、
弱々しい力士は、バランスが悪くて勝手に転ぶか、足がツルツルですぐに相手に押し出されていました。
太い眉(まゆ)を付けて“目力”を上げたり、立派なちょんまげを結(ゆ)っても強くはならなかったね。
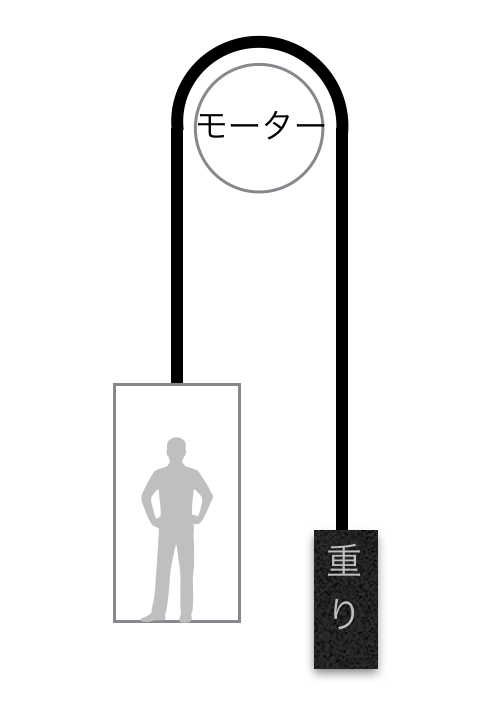
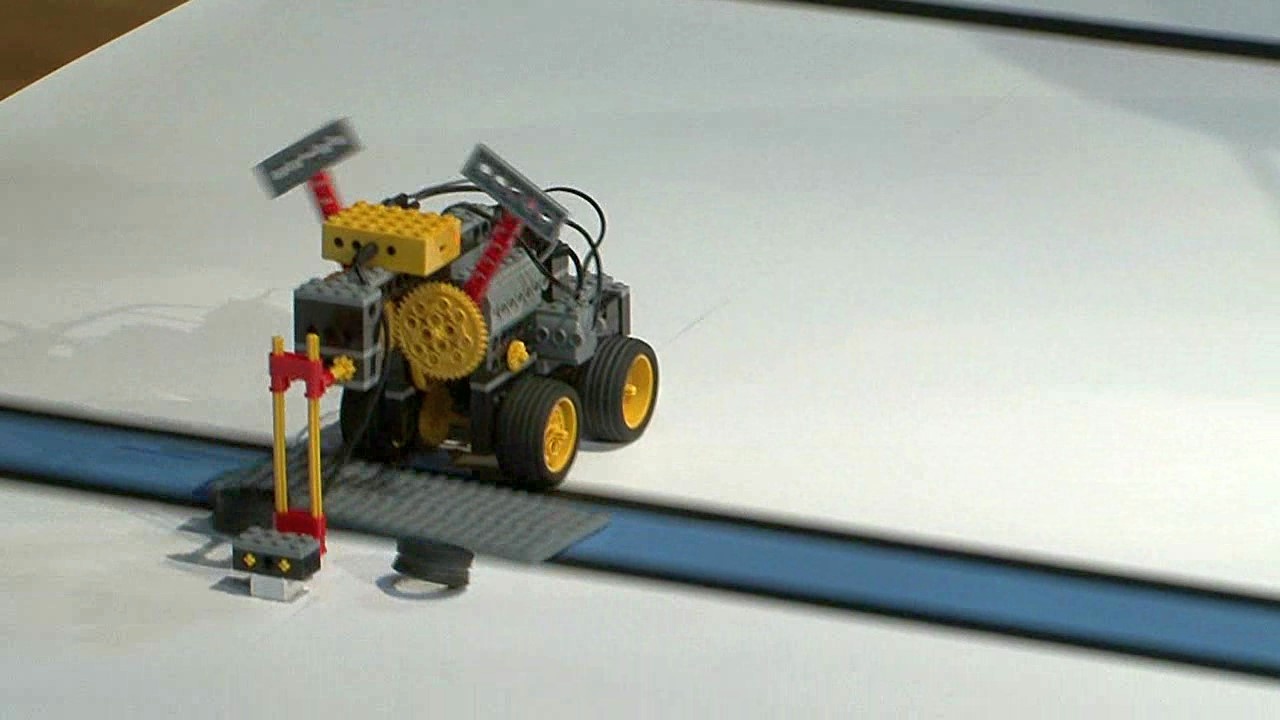
1.3 <ミドルコース『ロボベーター』>
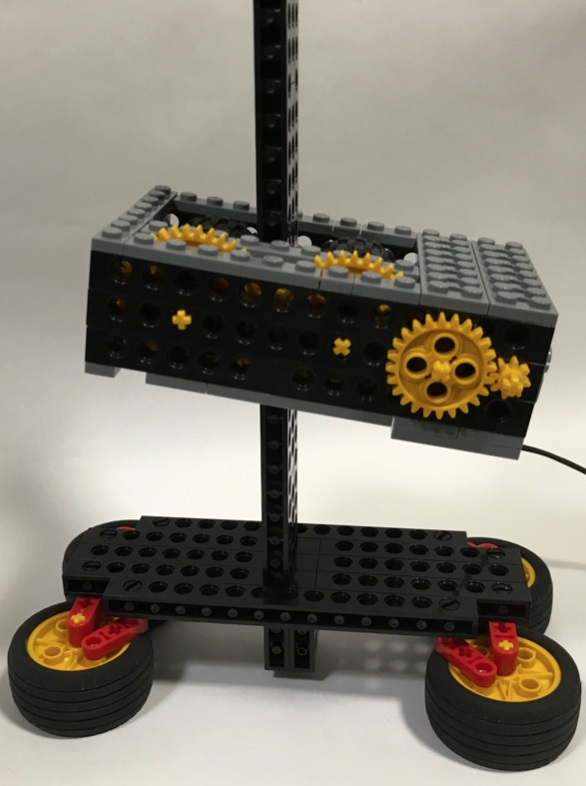
今回はエレベーター!
時々登場する「ロボットというよりも…」シリーズで、毎回とても面白く感動モノです。
製作難易度は高くなく、学習ポイントもさほど高度ではないのですが、
このキットでエレベーターを考案し、アイデアコンテスト全国大会で最優秀賞を獲得した当時小学4年生のアイデアに脱帽です。
 見た目としては、エレベーターのかご(運動部位)が水平から少し傾いてしまいますが、
見た目としては、エレベーターのかご(運動部位)が水平から少し傾いてしまいますが、このことにより、駆動ローラー(タイヤ)をレール柱に押し付け、滑らないように摩擦力を稼(かせ)ぐことができるのです。
このために、かごの重心を一方(モーター搭載側)に偏(かたよ)らせているとも言えます。
かごの水平バランス次第で、好みの摩擦力に調整できるということでもあります。
実際のエレベーターとは方式が異なることも学習しましたが、それは知識であって、実物を模(も)さないことで何より大事な創造力をいかんなく発揮したことが推(お)し量れます。
 1日目では、下降し終えて底に着いてもモーターは唸(うな)りを上げたままになり、上昇し終えると柱から外れて落下するという“恐怖のエレベーター”!
1日目では、下降し終えて底に着いてもモーターは唸(うな)りを上げたままになり、上昇し終えると柱から外れて落下するという“恐怖のエレベーター”!実物なら絶対に乗りたくありません。
 2日目でようやく、タッチセンサーやプログラムの働きにより、地上でも頂上でも自動停止する安心エレベーターになりました。
2日目でようやく、タッチセンサーやプログラムの働きにより、地上でも頂上でも自動停止する安心エレベーターになりました。実物でも、年を追うごとにセンサー類が多くなって安全性が高まっています。
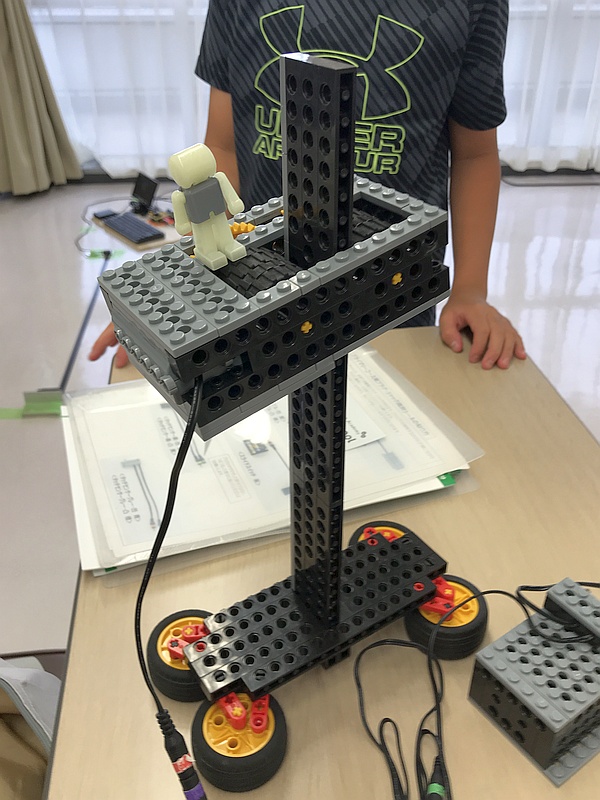
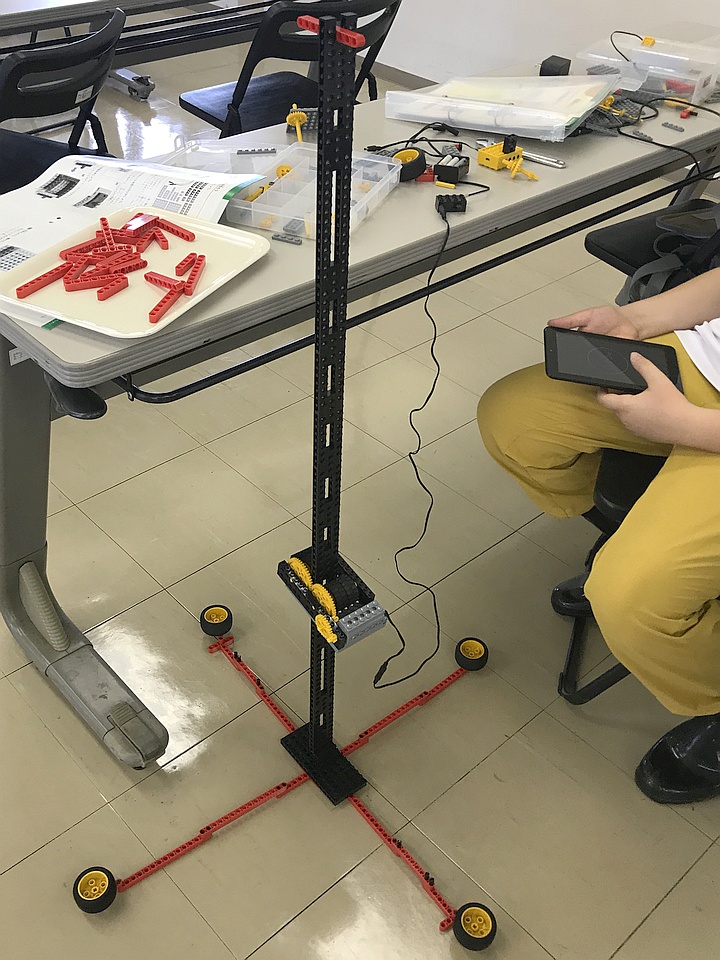
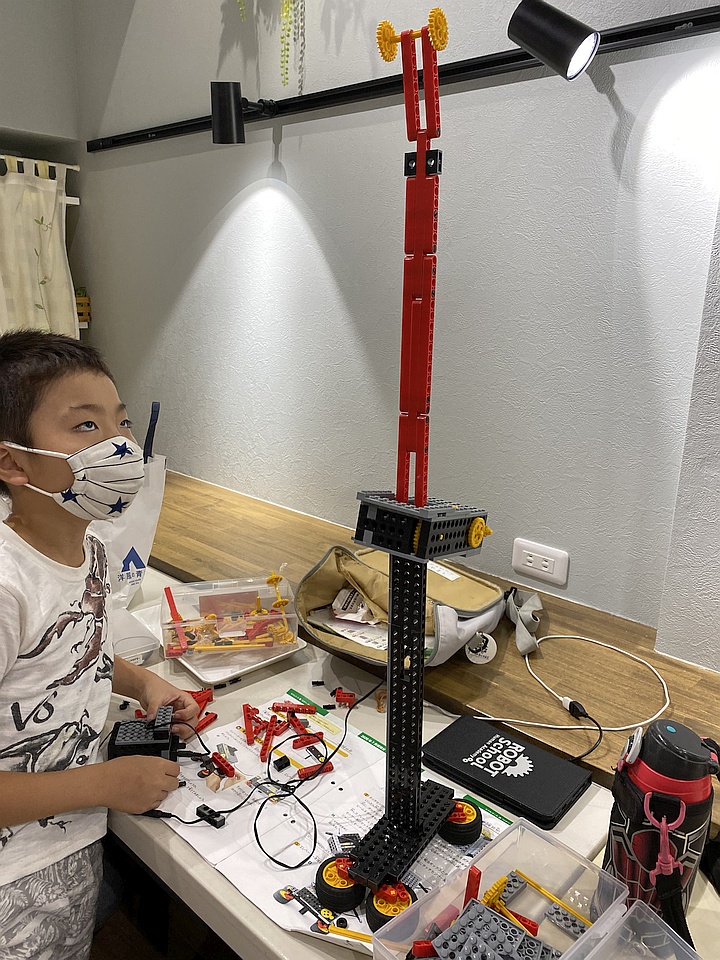
最後の競技は、高層エレベーターチャレンジ!
安全性はさておき、どこまで柱を高くして昇れたかを競います。
限られたパーツ数で、重たいかごが伝っても折れないギリギリの強度を保ちながら(*1)、いかに長く(高く)伸ばすかが工夫のポイントです。
テキストでは30cmそこそこであるのに対し、3倍、4倍と記録が伸びていき、中には140cmを超えんとする破竹(はちく)の勢いも見られました(*2)。
もうここまでひょろ長くすると、レール柱が竹のように撓(しな)り、今にも大事故になりそうで見ている方もハラハラでしたが、実物を設計するときは安全第一でね。


*1 かごの重心が偏っているので、上昇するほど柱が曲がり、倒れやすくなります。
*2 柱の高さではなく、かごが上昇する行程で測りました。
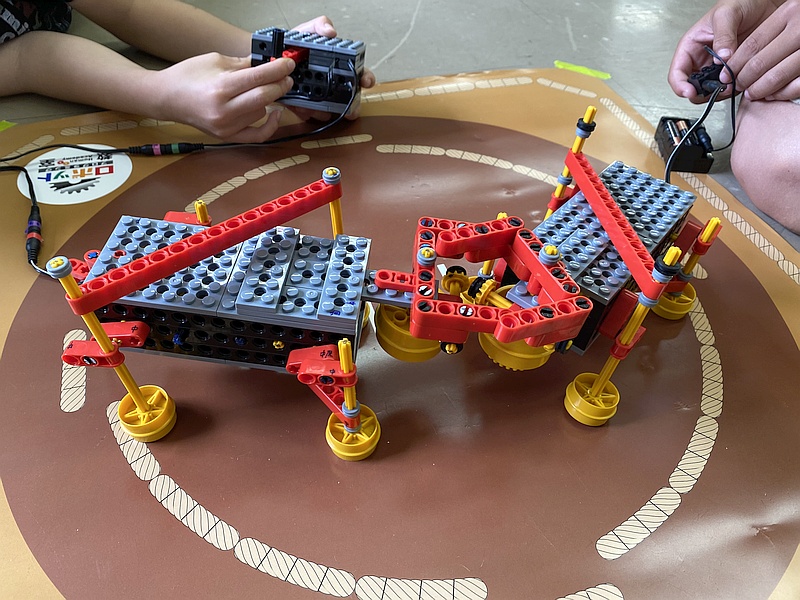
1.4 <アドバンスコース『ホイールローダー/フォークリフト(2)』>
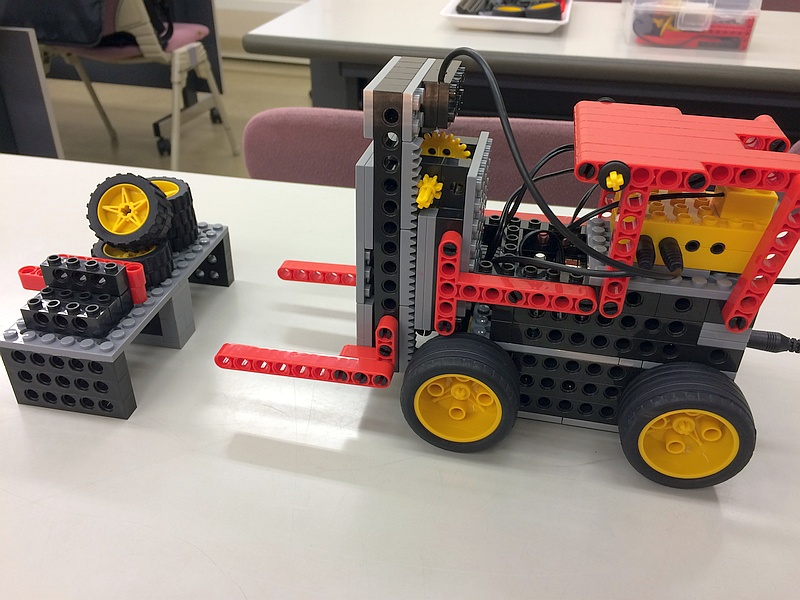 ロボットレース大会向けマシン注力の為、割愛します。
ロボットレース大会向けマシン注力の為、割愛します。これら建機ロボットだけでなく、多様な方式でミッションを達成するマシンが生まれてはスクラップされていきました…
1.5 <プロ2年目コース『アームロボット(1)』>
(7月ロボットレース大会向け計測機器開発の為、8月挽回予定内容です)
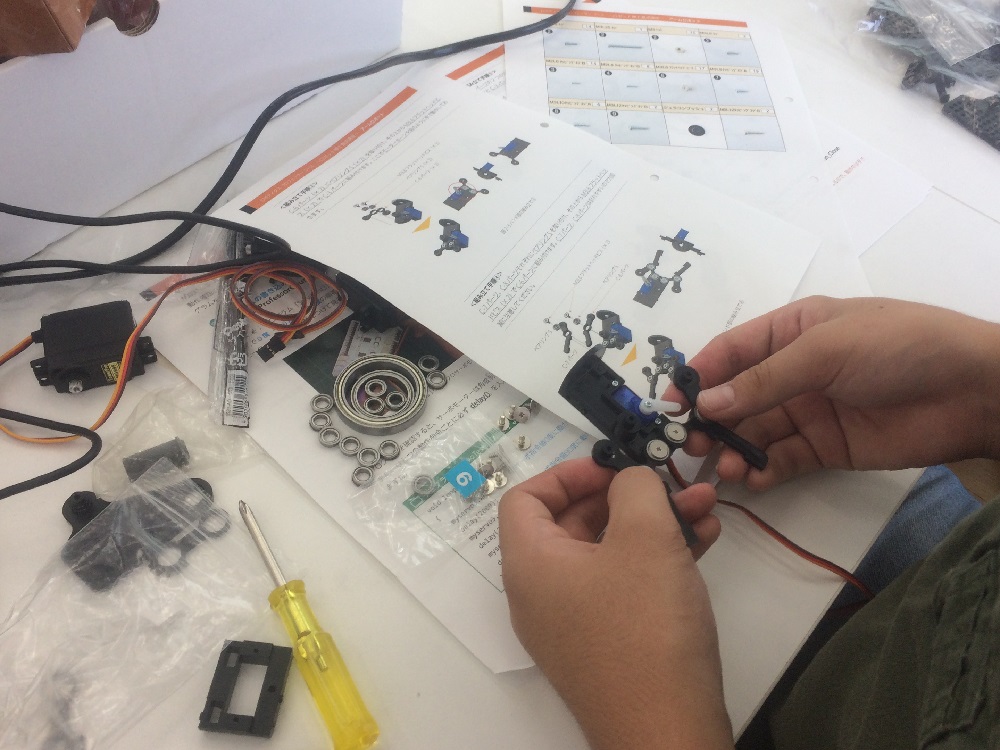
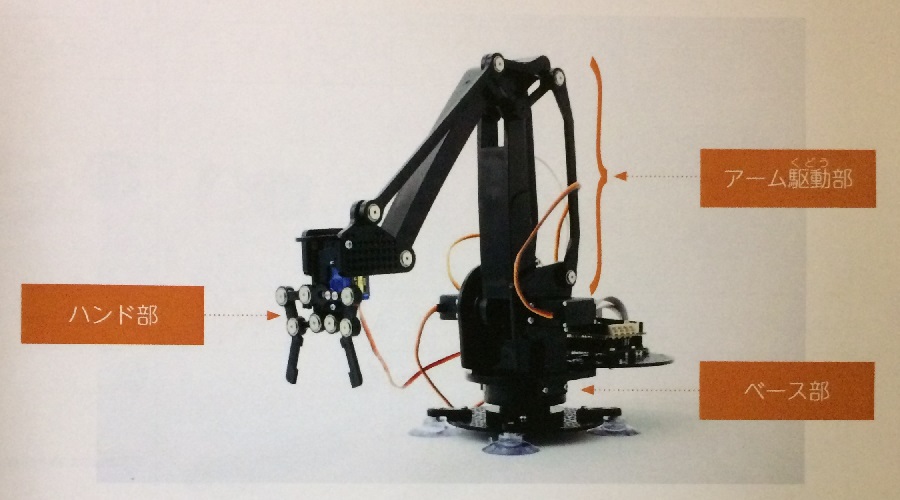 2年目の生徒さんお待ちかね、アームロボットの登場です。
2年目の生徒さんお待ちかね、アームロボットの登場です。人間の腕のように、複数の関節を曲げて、手先の位置と開閉を自在に操ります(*1)。
自動車の組み立てラインなどで活躍していますね。
 関節の動き(回転)を司るのは、やはりモーターです。
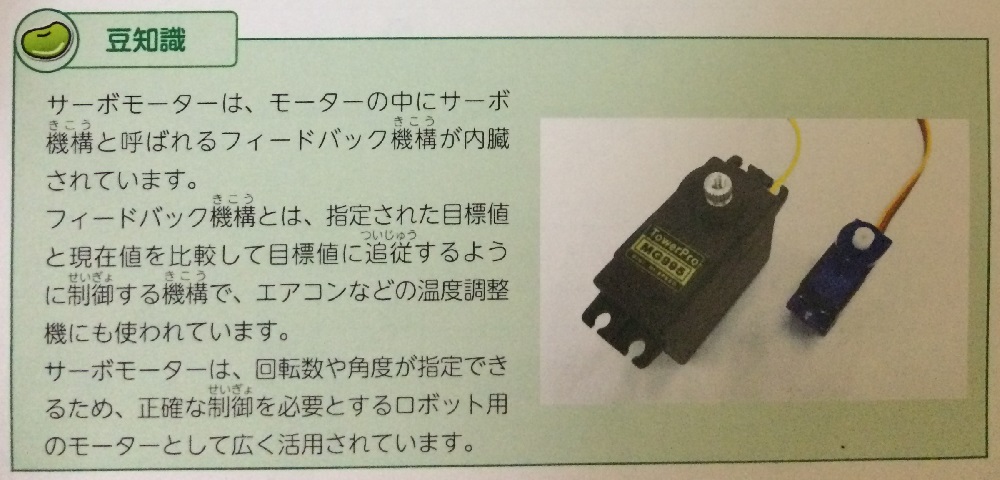
関節の動き(回転)を司るのは、やはりモーターです。それも、所望の角度分だけサッと回転してピタッと止まれる、サーボモーターの出番です(*2)。
サーボモーターは、民生品では、CD/DVDのトラッキング(*3)や、ラジコン飛行機のエンジンスロットル・フラップの開閉などに使われています。
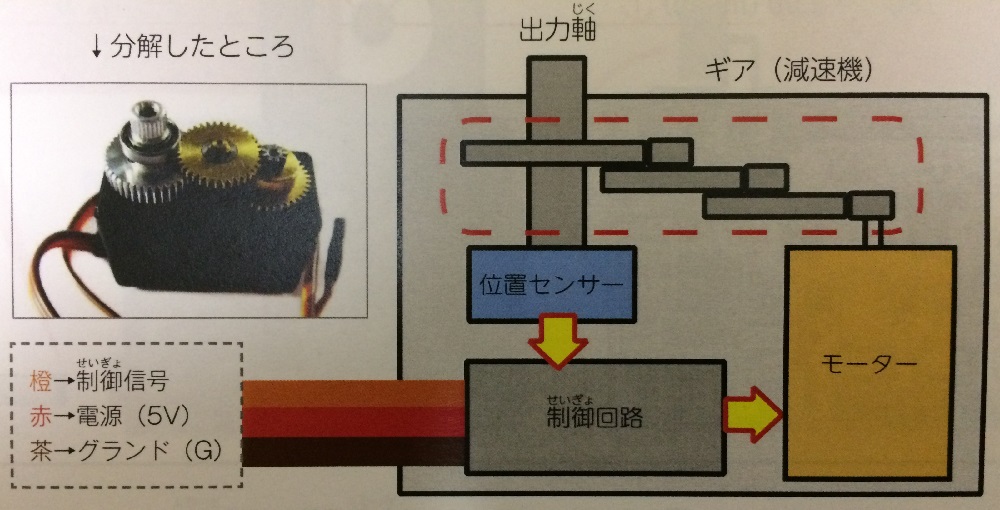
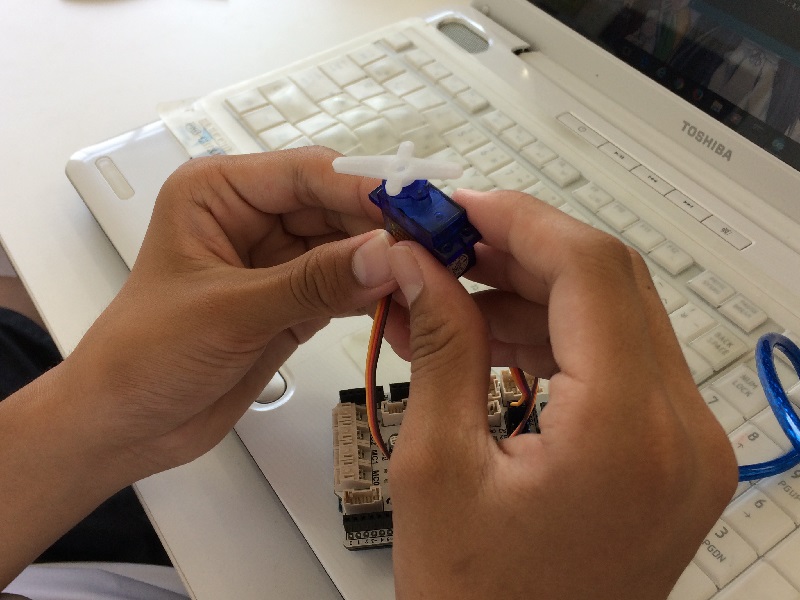
 サーボモーターには、電源線2本と、目標の位置(回転角)を伝える制御信号線の、計3本が伸びています。
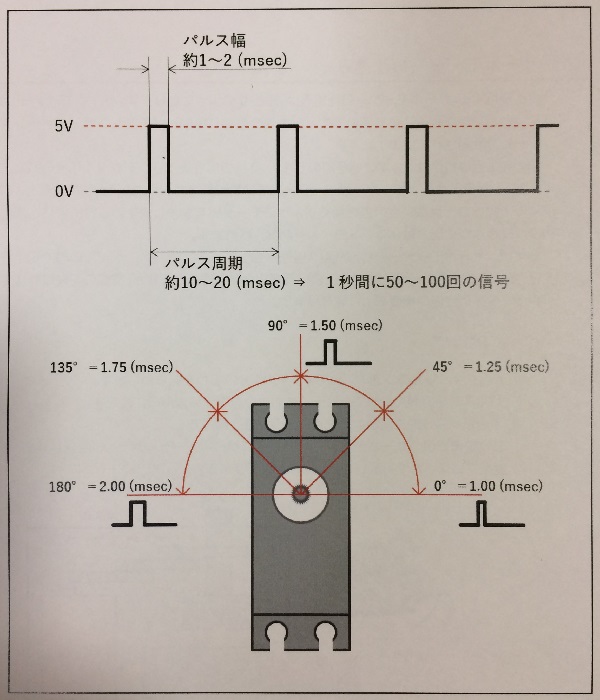
サーボモーターには、電源線2本と、目標の位置(回転角)を伝える制御信号線の、計3本が伸びています。小型ロボット・ホビー用として一般的なサーボモーターの信号線には、回転角に応じたパルス幅 1~2ミリ秒で、50~100HzのPWM矩形波(くけいは)(*4)を与えます。
 このサーボモーターは、指示された位置まで全力で回転し、行き過ぎると全力で戻ろうとし、または、
このサーボモーターは、指示された位置まで全力で回転し、行き過ぎると全力で戻ろうとし、または、これを小刻みに繰り返して振動(ハンチング)することもあり、瞬発的な電力を消費しますので、別途ACアダプターで電源を供給しました。
高負荷(手で止めたり)や連続で動作させた場合の発熱にも注意が必要です。
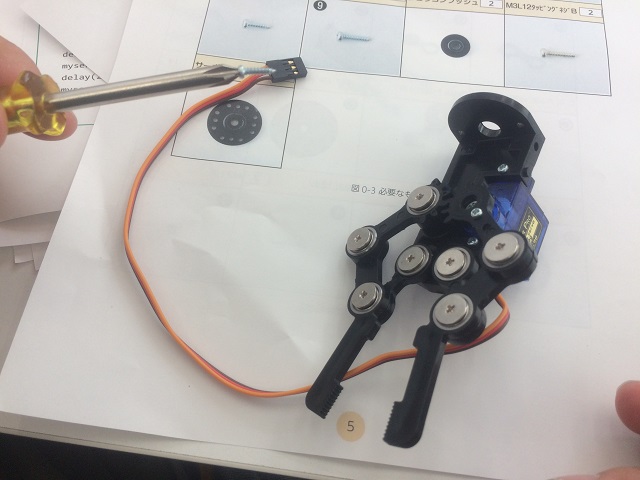
 また、原点位置から±90°と可動域が決まっていますので、初期位置に注意して、組み付けていきます。
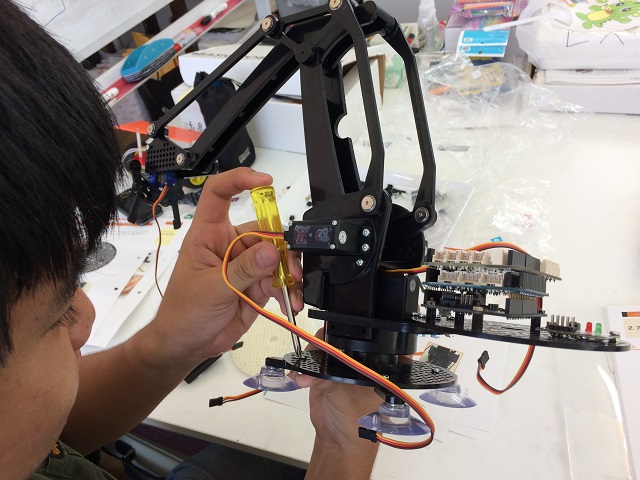
また、原点位置から±90°と可動域が決まっていますので、初期位置に注意して、組み付けていきます。2回とも時間の大半を製作に当て、アーム部の開閉に2個、ベース部の旋回に1個のサーボモーターと、ハンド部の開閉にマイクロサーボモーター1個の、計4個のサーボモーターを備える本格派の完成です。
無線コントローラー(ゲームパッド)で各関節を操作するプログラムが、ハサミ(グラップル)付きパワーショベルのように、アーム・ハンドの開閉を簡単にさせてくれます。
次回は、このアームロボットの制御方法について、解明していきます。
*1 手首の関節が無いので、手先の向き(ネジ回し等に必要)は変えられません。
*2 普通のモーターと、回転部に備え付けたエンコーダ(符号化装置)で回転数や角度を検出して、マイコン(プログラム)で制御する方法もありますが、
制御のスピードや精度が要求される用途では、通例、これら(モーター+エンコーダ+制御回路)をパッケージングしたサーボモーターを使います。
*3 CD/DVDのデータ記録ピット(微細な凹凸)は、うずまき状(ブレあり)に並んでおり、再生中レーザースポットを内周から外周へ移動・追従させ続けるトラッキングサーボが必要です。
加えて、盤面の歪みに応じて上下動し、レーザー焦点を合わせ続けるフォーカシングサーボも必要です。
*4 一周期ごとに、ONとOFFの時間の比(デューティー比)を変えることでアナログ量を表す、デジタルパルス波形のこと。
2. 7月の課題
<スタートアップ(全コース)>
特にありません
<プライマリーコース>
- オリジナル図形プリント
http://robocobo.sakura.ne.jp/blog/HW/RobotP2007-Q.pdf
<ベーシックコース>
- 上記授業内容を精読する(概ね3年生以上/低学年は補助の下で)
- オリジナル課題プリント(3面図+設問)
http://robocobo.sakura.ne.jp/blog/HW/RobotB2007-Q.pdf
<ミドルコース>
- 上記授業内容を精読する
- オリジナル課題プリント(3面図+設問)
http://robocobo.sakura.ne.jp/blog/HW/RobotM2007-Q.pdf
<アドバンスコース>
⇒ロボットレース大会向けマシン注力の為、割愛しました
<プロ2年目コース>
⇒ロボットレース大会向け計測機器開発の為、ありません
3. 6月の解答
<プライマリーコース>
http://robocobo.sakura.ne.jp/blog/HW/RobotP2006-A.pdf
<ベーシックコース>
http://robocobo.sakura.ne.jp/blog/HW/RobotB2006-A.pdf
<ミドルコース>
http://robocobo.sakura.ne.jp/blog/HW/RobotM2006-A.pdf
<アドバンスコース>
⇒ロボットレース大会向けマシン注力の為、割愛しました
4. 今後の授業スケジュール
◆8月第2回目は一週遅れます
――――――――――【佐藤教室長】――――――――――
[東福間]第1・3土原則<学習ルームでこぼこ>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドバンス
⇒ 8/1, 22※, 9/5, 19, 10/3, 17
※一週遅れます
[中間]第2・4土原則<なかまハーモニーホール>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドバンス
⇒8/ 8 第1回 3F会議室2
8/29※第2回 3F会議室2
8/8, 29※, 9/12, 26, 10/10, 24
※一週遅れます
[小倉北]第1・3日原則<ムーブ>
- 10:30~ ベーシック/プライマリ
- 13:00~ ミドル/ロボプロ2年目
- 15:00~ アドバンス
⇒8/ 2 第1回 5F小セミ
8/23※第2回 5F小セミ
9/6, 20, 10/4, 18
※一週遅れます
――――――――――【中野教室長】――――――――――
[八幡東]第1・3土原則<レインボープラザ4F>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドバンス
⇒ 8/1, 22※, 9/5, 19, 10/3, 17
※一週遅れます
[小倉南]第2・4日原則<総合農事センター2F>
- 10:30~ ベーシック/プライマリ
- 13:00~ ミドル
- 15:00~ アドバンス
⇒ 8/9, 30※, 9/13, 27, 10/11, 25
※一週遅れます
5. お知らせ
1) アイデアコンテスト全国大会 応募〆切8/39/6(日)オンライン開催されます。Web応募できます。
応募〆切が 7/31(金) → 8/3(月) 17:00 に延長されています。
例年の冊子配布はありませんので、詳細は下記をご覧下さい。
https://kids.athuman.com/robo/event/convention/2020/
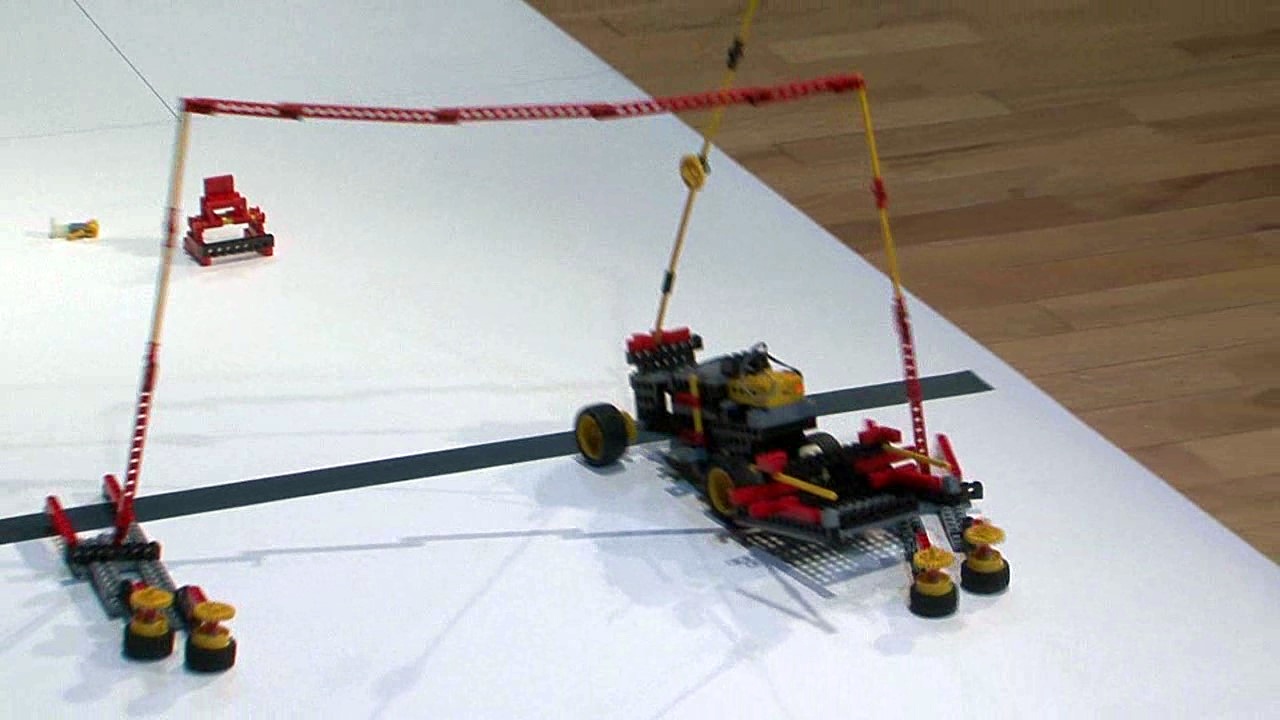
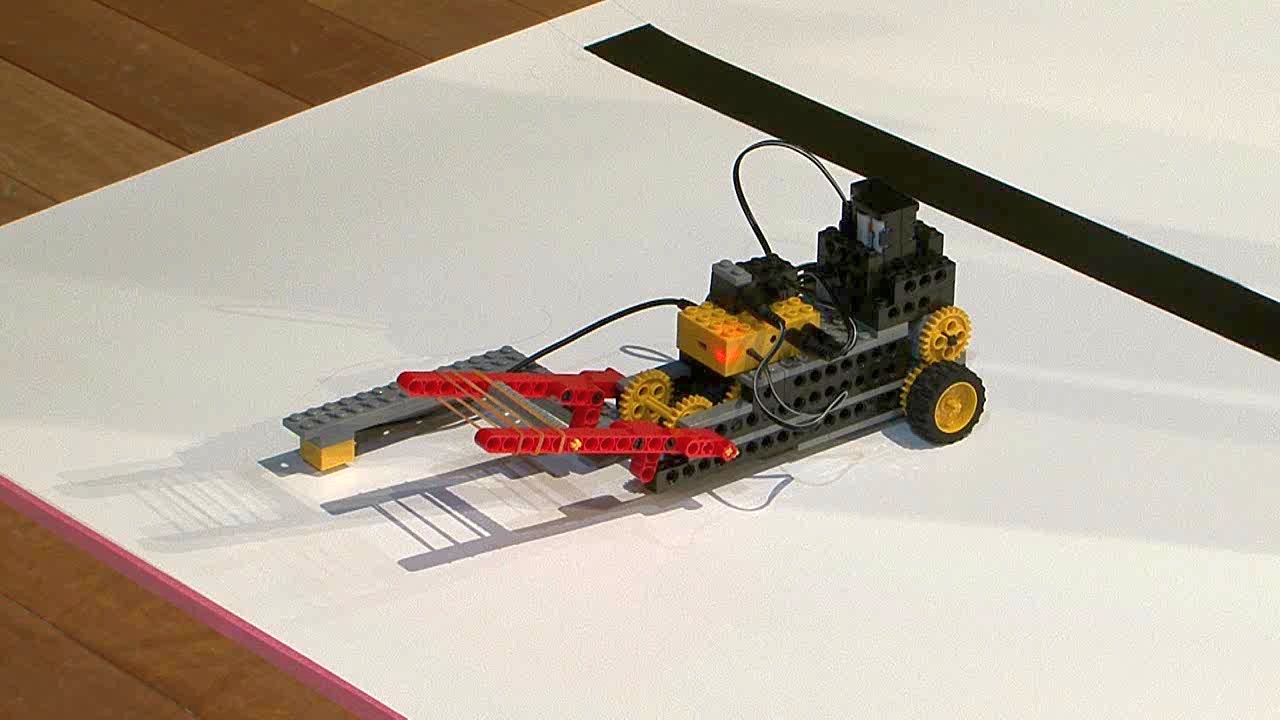
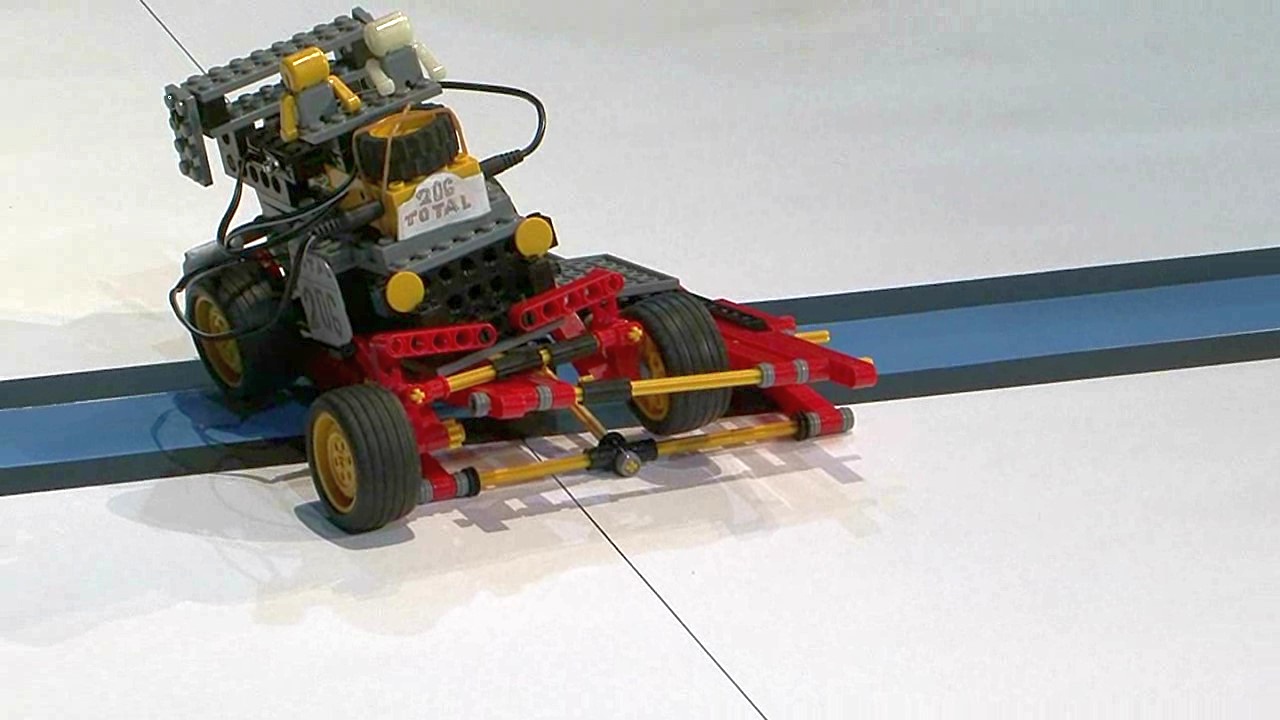
2) 5教室合同ロボットレース大会 終了
 7/24(金)ユメニティーのおがた 小ホールにて、オリジナルレース大会を開催しました。
7/24(金)ユメニティーのおがた 小ホールにて、オリジナルレース大会を開催しました。総勢57名(プライマリー/ベーシック18名、ミドル14名、アドバンス25名)が参戦し、白熱した競争を繰り広げました。
各コース毎に設けられたミッションを達成しながら、出走3回の中でゴールまでの最短タイムを記録しました。
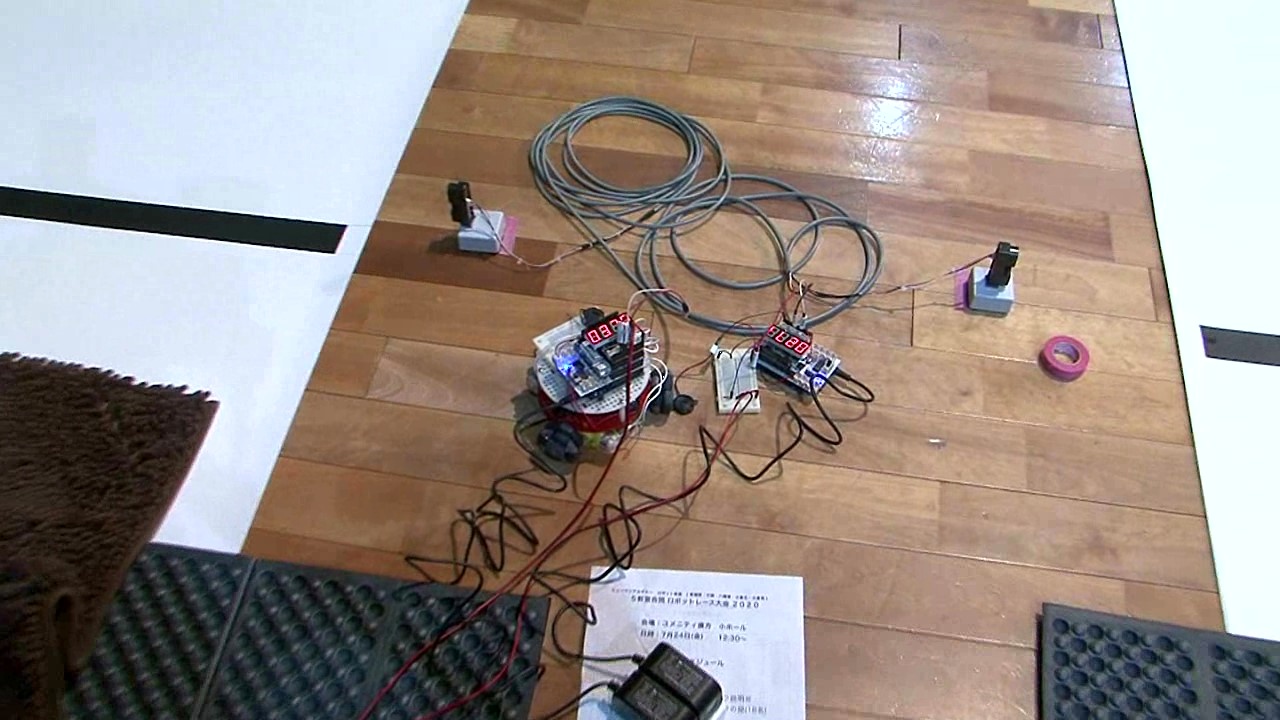
 タイム計測機は、プロ2年目の髙嶋君が開発した自動ストップウォッチです。
タイム計測機は、プロ2年目の髙嶋君が開発した自動ストップウォッチです。カウントダウン音「ドレミファソラシド」を発して計測スタート、赤外線センサー+手動ストップによるダブル計測値で信頼性を高め、万一の為に用意しておいた高級ストップウォッチの出番を無くしてくれました。
大会へ出場された皆さん、お疲れ様でした。
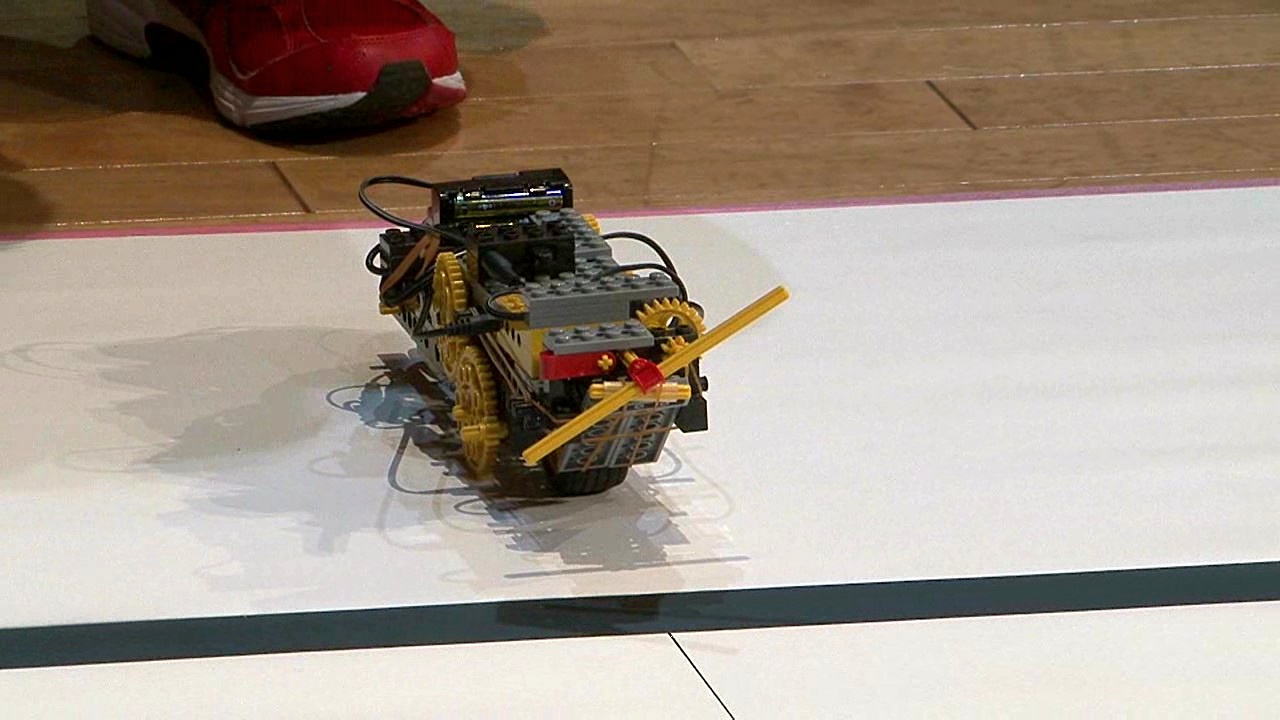
本番の様子を見ておりますと、緊張のせいか、練習時より成功率が低下した印象ですね。
シンプルで環境に左右され難いロボットが強いようです。
結果を残せた人、上手くいかなかった人も、大会を通して成長しましたね。
結果のみならず、取り組み方の良かった点や反省点も考え、今後に生かしてください。
(先生たちにも「もっとこうすれば良かった…」と反省点があります)
そして頑張った自分を褒めてあげましょう!
毎年夏に本部が主催するアドバンスレース大会が中止されましたので、初の試みとして、全コース対象・教室独自のスピードレース大会を企画しました。
多くの生徒さんが簡単なロボットでも参戦できるようルールを考えましたが、そんな思惑をよそに個性的で創造性に溢れるロボットに驚かされました。
特にアドバンスでこれが顕著でしたね。
次回開催する時は、もう少し皆さんを悩ませるルールを考えますのでお楽しみに!!
【プライマリー/ベーシックコースの部】平均3.18秒・延べ完走率78%
 1位 小倉北 弥栄 2.33
1位 小倉北 弥栄 2.332位 小倉南 土井 2.54
3位 中間 上村 2.62
4位 小倉北 砂川(晴)2.69
5位 八幡東 大谷 2.72
6位 小倉北 鑓水 2.74
7位 八幡東 武田 2.77
8位 小倉南 安倍 2.89
9位 中間 島田 2.92
10位 八幡東 栗屋 2.98
11位 小倉北 砂川(裕)3.01
12位 中間 小川 3.15
【ミドルコースの部】平均4.97秒・延べ完走率33%
1位 小倉南 林田 3.72
2位 小倉南 倉富 4.32
3位 東福間 筋田 4.42
4位 八幡東 下木 4.63
5位 中間 千葉 4.77

【アドバンスコースの部】平均3.74秒・延べ完走率53%
1位 小倉北 上村 1.73
2位 中間 渡邉(心)1.82
3位 中間 渡邉(倫)2.01
4位 中間 川村 2.03
5位 小倉南 今橋 2.13
6位 小倉北 糸山 2.16
7位 八幡東 谷川 2.29
8位 小倉北 井上 2.40
9位 小倉南 塚野 2.53
10位 中間 桑村 2.58
11位 東福間 中野 2.75
12位 小倉南 橋本 2.87
13位 東福間 久保田(陸)3.03
14位 八幡東 宮尾 3.27
15位 中間 山本 3.35
16位 東福間 久保田(暖)3.49
16位 中間 伊達 3.49


3) オリジナルグッズ(ハンディファン・マスクケース)販売
◇2WAYスタンド付ハンディファン 1,320円
◇抗菌マスクケース(オリジナルステッカー付) 660円
数量限定・在庫次第で終了します。盆休み前後にお渡し予定です。
ご希望の方はメールにて承ります。お代はお引落しで頂戴します。
http://robocobo.sakura.ne.jp/blog/goods/maskCase_handyFan.pdf
4) 8月景品交換会
見送っておりました3ヶ月毎の宿題ポイント交換会を下記授業日に開催します。
ポイントカードを忘れずに、早めに来て下さい。
[東福間]8/1
[小倉北]8/2
[中 間]8/8
[小倉南]8/9
[八幡東]8/15
5) 6月課題 高得点者 []内は教室と学年
◆プライマリ【4名平均 図形4.0】
5点…星野[小倉北1], 論[小倉北2]
◆ベーシック【14名平均 図面2.4+設問2.7=5.1】
10点…なし
9点…藤津[中間4]
8点…小牧[小倉南4]
7点…武田[八幡東4], 柴田[小倉北3]
◆ミドル【14名平均 図面3.7+設問1.6=5.3】
10点…なし
9点…森崎[八幡東5], 中村[小倉北6]
8点…中村[東福間5]
7点…千葉[中間5], 野口[八幡東6]
6点…なし
東福間・中間・小倉北教室 佐藤 / 八幡東・小倉南教室 中野