2.今月の課題
3.今後の授業スケジュール
4.お知らせ
1. 12月授業内容
1.0 <スタートアップ(全コース)>
割愛します。
1.1 <プライマリーコース『アルペンくん』>
割愛します。
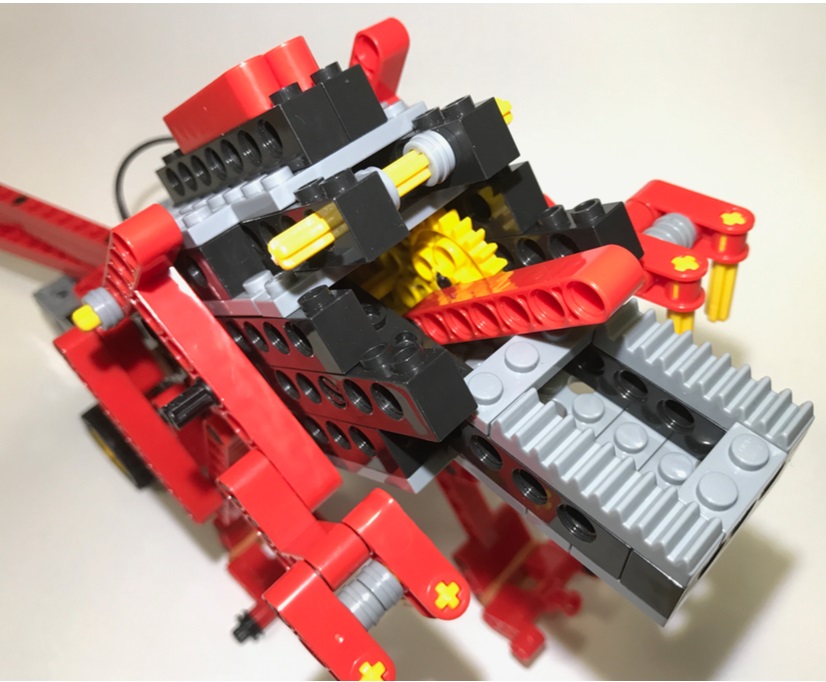
1.2 <ベーシックコース『ロボフィッシュ』>
魚型ロボットです。
1日目で製作が完了し、持ち上げてスイッチを入れると、釣(つ)った魚のように尾びれを元気よく振(ふ)ります。
このロボットを床に置くと・・・前へ進みますね。当たり前でしょうか?
中には、後ろにさがるロボフィッシュもありますよ!
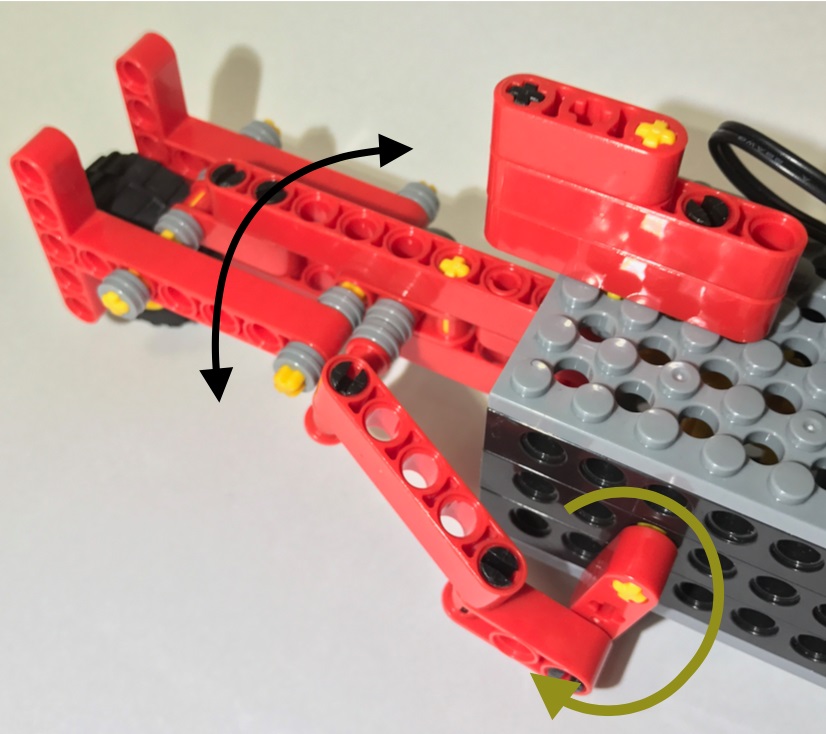
試(ため)しに、タイヤSの上にある胸(むな)びれを取り外してみます。
すると、うまく進まなくなりました。
それはそうかもしれません、尾びれを左右に動かしているだけですから(*1)。
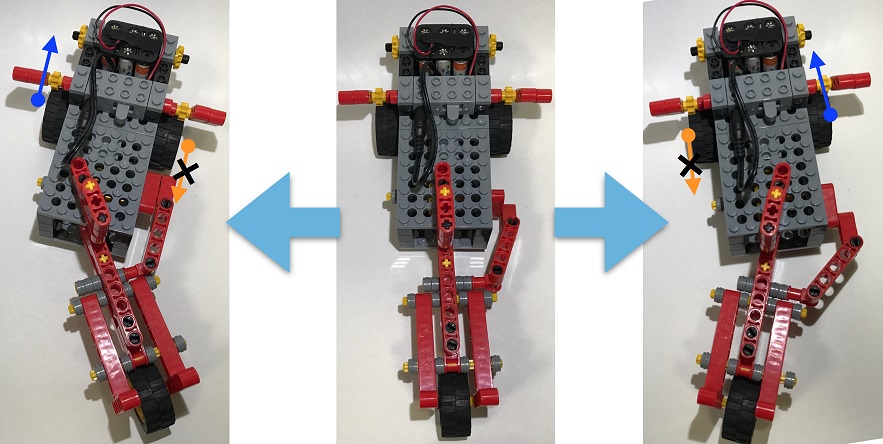
よくよく観察すると、尾びれを振る度(たび)に、左右の両輪がちょっと前に回転しては後ろにも回転して、その場で体をくねくね方向転換(ほうこうてんかん)させているだけのようです。
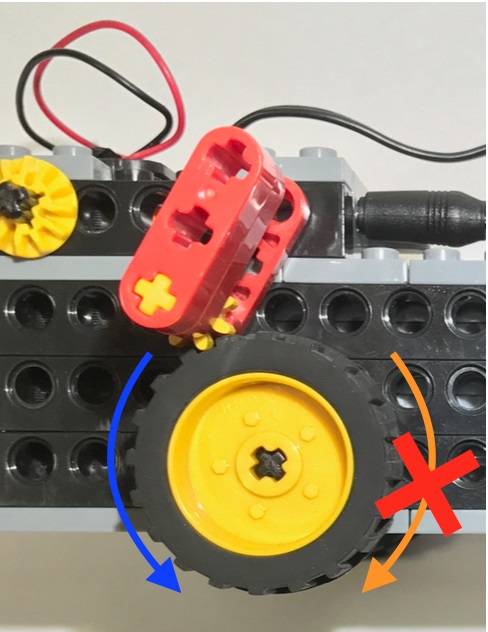
秘密は、ただの飾(かざ)りに見えた胸びれにあったのですね。
この胸びれをタイヤの前方に当てると…、タイヤは前方向には軽く回転しますが、
逆方向には(胸びれのピニオンギヤとタイヤの横みぞが引っ掛かって)ロックが掛かり、後退(こうたい)を阻止(そし)することができます。
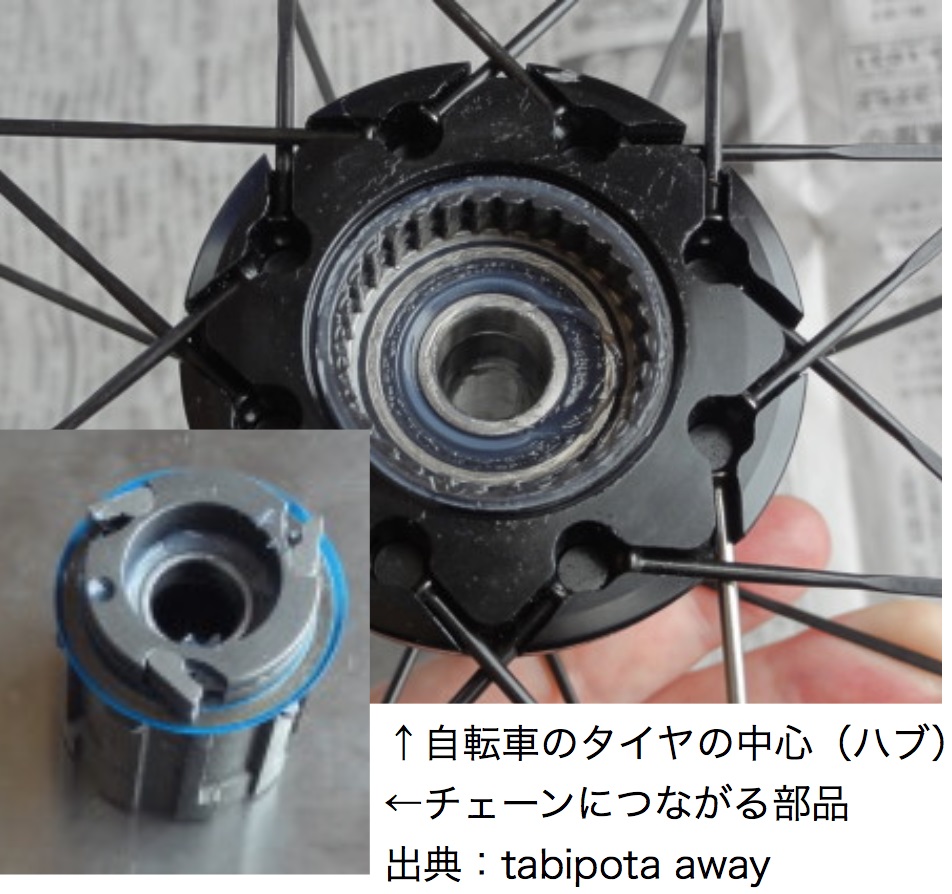
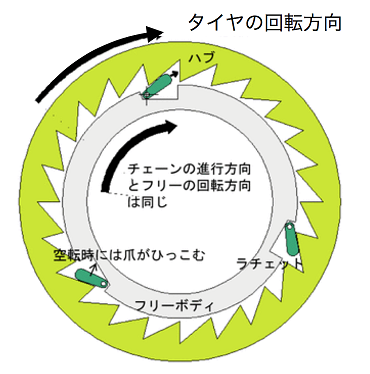
ラチェット機構といい、自転車のペダルが前方向にはしっかり漕(こ)ぐことができるものの、
走行中に漕ぐのを止めたり、逆方向に空回りさせたり(*2)することができるのも、この機構のおかげです。

これで体をくねらせる度に左右のタイヤが少しずつ交互(こうご)に前進し、全体としてスイスイ泳ぐようになりました。
坂道だって、上りますよ!
モーターを逆回転させたって、変わりません(*3)。
なお、モーターの回転を尾びれの往復(おうふく)運動に変えるクランク(*4)という仕組みも大事なポイントですよ。

2日目最後のゲームは、えさ取り競争!
カラフルなモールやクリップを小魚に見立て、散(ち)りばめます。
ロボフィッシュの口には磁石を貼(は)り付け、うまくえさの方向に泳がせて「ぱくっ!」
一定時間内に多く食べたロボットの勝ち。
みんな、何度言っても、スタートラインは守らないわ、フライングはするわ、手で押すわ、景品の駄菓子(だがし)を賭(か)けて燃えに燃えます。
誰です? えさを手づかみして魚の口に運んだのは?
*1 水中の魚やイルカはそれで周りの水を後方へ押しやって泳げるのですが。
*2 このとき「チチチ…」と音がしますね。ラチェットの作動音です。
*3 側面のロッド3アナの回転方向は逆になりますが、尾びれを左右に振る動きは同じだからです。
代わりに、胸びれをタイヤの後方に当てると、どうしたって後退するようになります。
*4 実際に使用している部品は『クランク』ではなく『ロッド3アナ』ですが、クランクと同じ作用を働かせています。
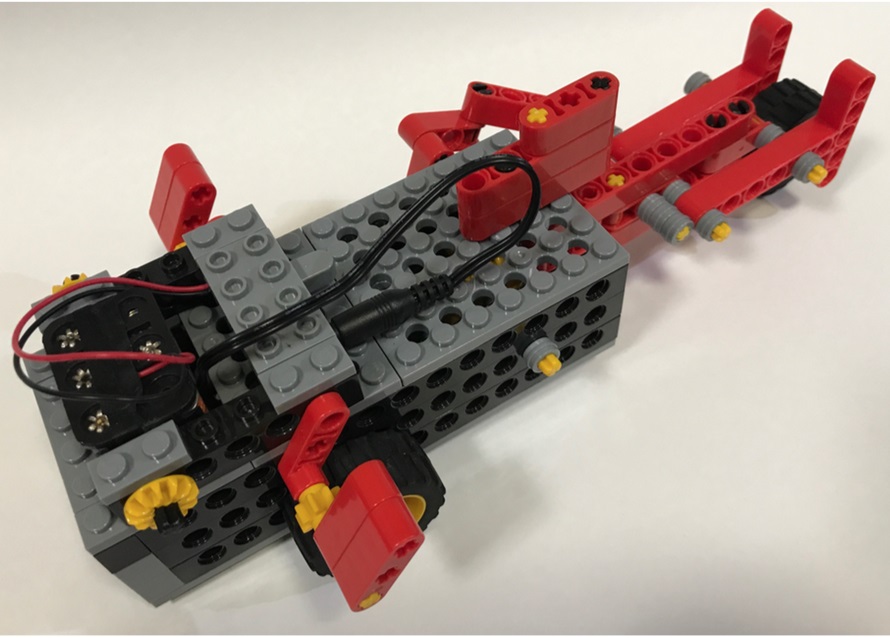
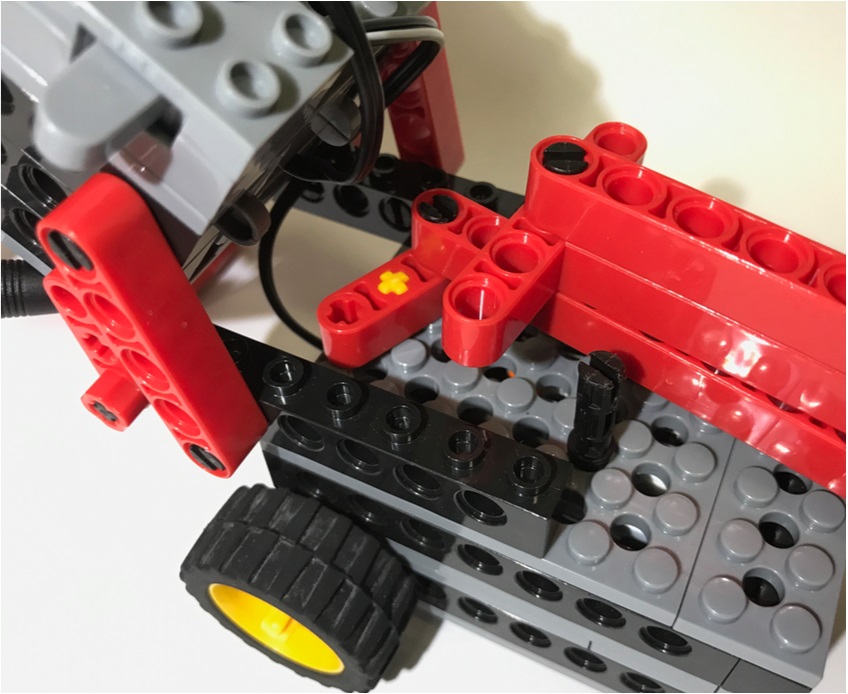
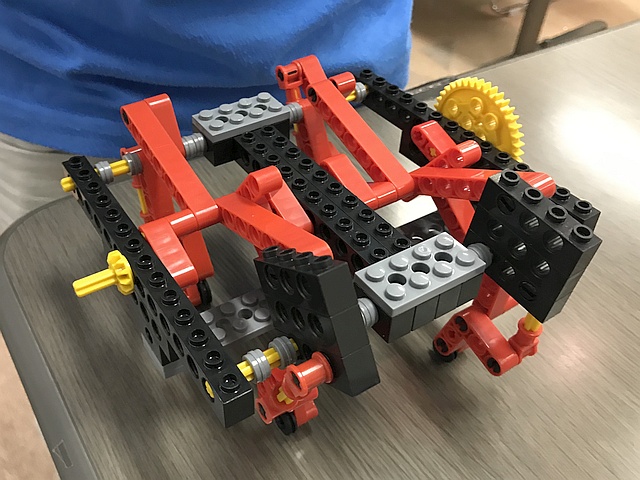
1.3 <ミドルコース『ロボザウルス』>

恐竜型2足歩行ロボットです。ミドルコース最大級の大きさです。
モーター1つで、両脚はもちろん、両手も振り、首も上下させる他、
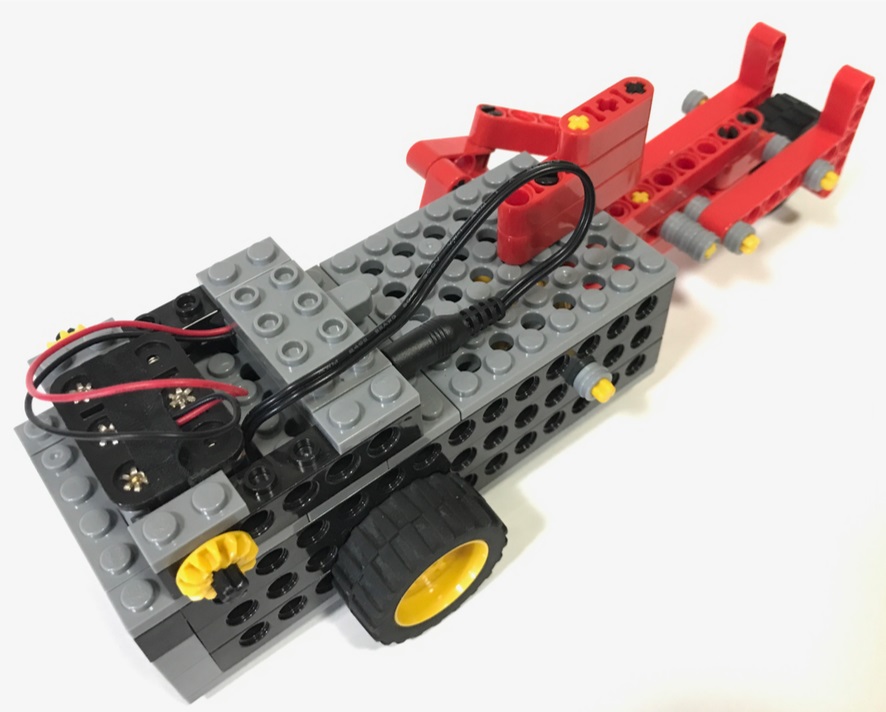
台車のタイヤの回転を利用してしっぽまで振る凝(こ)った造りで、巨体と相(あい)まって圧巻(あっかん)です。

両手を振る運動は、カム機構(*1)で実現しています。
赤いベロを出し入れするのに連動して首を上下させたり、しっぽを振ったりするのは、クランク機構によります。
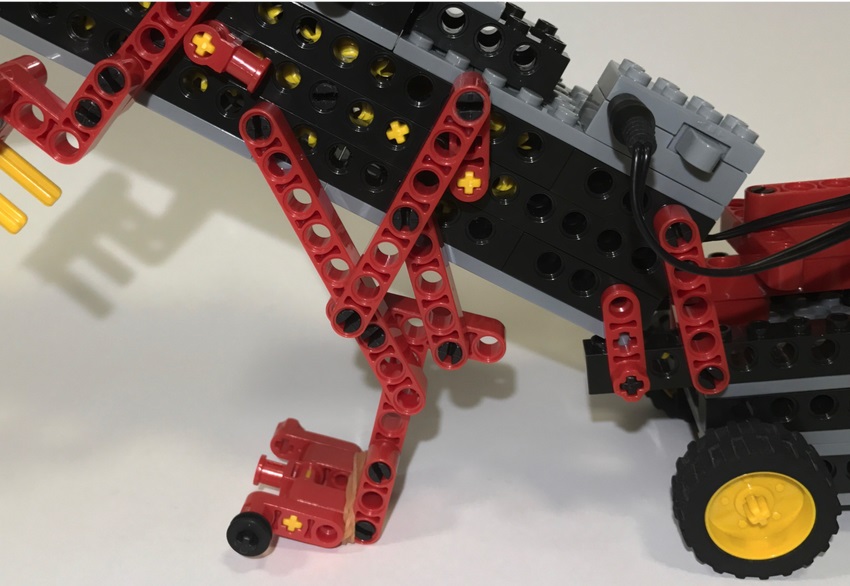
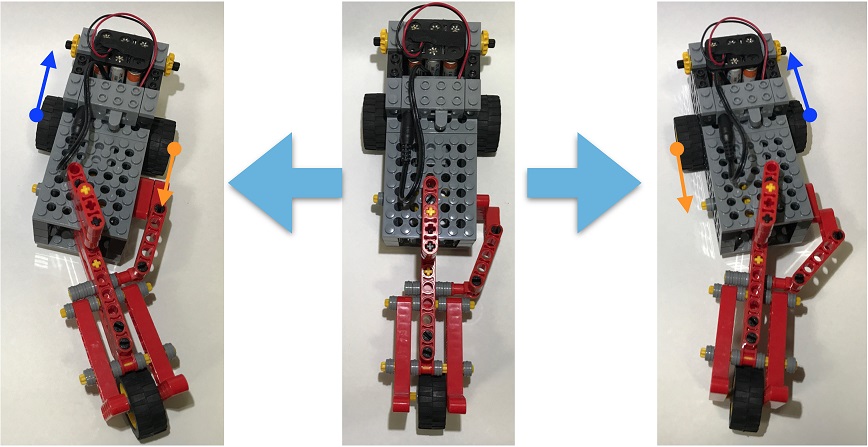
肝心(かんじん)の2足歩行は、回転するクランク(*2)の端につないだ連接ロッド(7アナ)が脚ロッドを押し引きする“てこクランク機構”という仕組みで、両脚の前後および上下への運びを見事に実現しています。
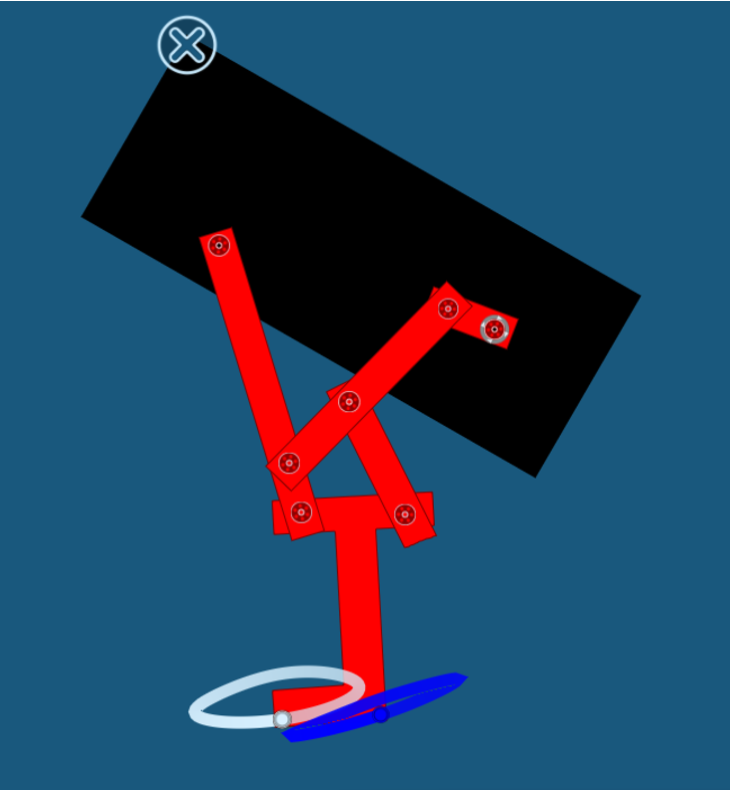
右図に足先の動く軌跡(きせき)を載せました。つま先は白線、かかとは青線で示してあります。
一体化したパーツなのに、つま先は楕円形を描くのに対し、かかとは細い三日月形を描きます。
このように、つま先とかかとの動きが違うからこそ、地面をつま先で効果的に蹴ることができるわけです。
てこクランク機構は、先月の『ロボワン』しかり、ほとんどの動物ロボットの脚リンクに使われています。

安定して片足を浮かせられるのは、接地した方の片足と、台車の左右両輪とで、“3点支持”が確保されているためであることも学習しました。

自動車やテーブル・椅子など、4点支持の製品が多いですが、実は、4脚より3脚の椅子の方がグラつかないです(*3)。
椅子(の座面)をグラつかないよう固定するということは、脚の先端を、床なり地面なり、同一平面内に置くということです。
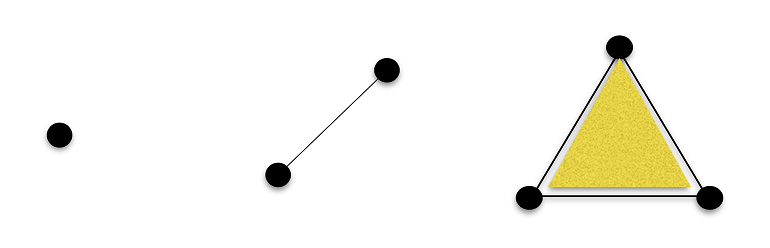
数学的な表現になりますが、我々が住む3次元空間内で任意の3点を選ぶと、その3点を通る平面は一意に決まってしまいます。
3点を結ぶことで、初めて“三角形”という決まった平面が生まれます。
(ある1点や2点を通る平面なら、無限に存在しますよね)
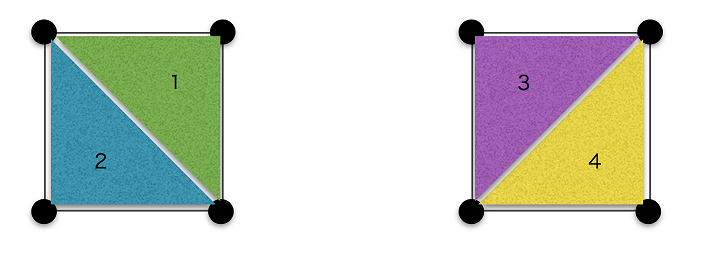
ところが、4点以上を選ぶと、全ての点が同一平面内に存在するのは奇跡(きせき)と言えるようになります。
例えば、4点の場合、図に示す通り、異なる4面が存在し得るのです。
どの色の1面を選んでも、仲間外れの1点が出てしまいます。
これが椅子のグラつき(どれか1本だけ浮いた脚)になります。

もちろん、4脚ともピッタリ同じ長さに揃(そろ)えれば(奇跡?!)、平らな床の上では固定されますが、凸凹の地面に置くと、やっぱりグラグラですね。
だから、カメラの“三脚”なんです。



さて、2日目最後の競技は、相撲(すもう)対決!
相手を土俵(どひょう)から押し出すか、倒した方の勝ちです。
ただでさえ高負荷(こうふか)(*4)のメカに、行く手を阻(はば)むは相手の巨体。
各者、迫力の戦いを見せる一方で、スイッチを入れても微動だにせず静寂(せいじゃく)を守り抜くスフィンクスやら、勝手に自己分解する環境に優しい“ボロ”ザウルスもいて、拍子(ひょうし)抜けする一幕もありました。
*1 回転体(Tジョイント)の外形に沿って他の部品(腕のTロッド)を押し動かす機械要素。
*2 実際に使用している部品は『クランク』ではなく『ロッド3アナ』ですが、クランクと同じ作用を働かせています。
*3 4点支持の製品が多いのは、倒れにくく安全だからです。
*4 動かすパーツが多かったり、重かったりして、モーターの負担(ふたん)が大きいこと。
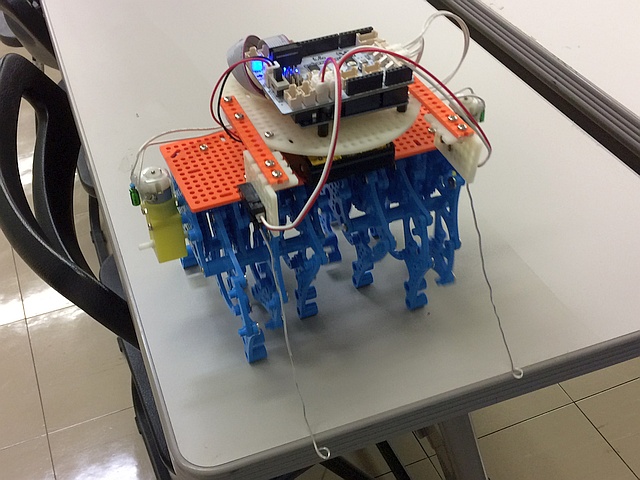
1.4 <アドバンスプログラミングコース『モゾット(1)』>
とても秀逸な設計ですね。
ちょうどプロ1年目コースと同様の、モゾモゾ歩いてしまう多脚リンクロボットです。
脚リンクが複雑で、造るのも(*1)、動きを理解するのも、難しいですね。
ここは、文章よりも、テキストp.9に紹介されているテオ・ヤンセン氏の考案した「ストランド・ビースト」を検索して、素晴らしいYouTube動画で学びましょう。
■テオ・ヤンセンの歩行機構 Theo Jansen Mechanism
https://www.youtube.com/watch?v=uWzw7Jq9xBc
■【人工生命体】テオ・ヤンセンのストランドビーストがめちゃくちゃかっこいい【物理エンジン】
https://www.youtube.com/watch?v=mM_yJIEIqkA
■STRANDBEEST EVOLUTION 2017
https://www.youtube.com/watch?v=LewVEF2B_pM
*1 テキストの写真と図面だけでは造れない人が続出、先生の製作サンプルを見ながら何とか…というレベルでした。
1.5 <プロ1年目コース『リンクロボット(3)』>
多脚リンクロボットの3ヶ月目、最終月です。
知的ロボットに必要な「感じて」「考えて」「動く」機能のうち、先月までは「考えて」「動く」だけでした。
いや、「考える」といっても、定めたプログラム通りに動くだけで、せいぜい次の動作に移行する秒数を計っているだけでした。
想像してみてください。いくら“脳ミソ”があっても、外界との接点が無ければ(目も耳も鼻も触覚さえも!)、意識は闇の中…。息が詰まりそうですね。
1日目では、「感じる」触覚を与えます。
円形ボード(頭部?)の左右にタッチセンサーを取り付け、そこから針金(触角?)を前方へ2本伸ばし、地面まで垂らします。
机上で前進中、針金の先が机の縁から垂れ下がるとタッチセンサーがOFFになって、これを検出するプログラムでロボットを後ずさりさせたり、旋回させたり、自由に設計できます。
瞬く間に、崖から落ちないインテリロボの完成です。
これだけでも、ロボット掃除機を想わせる動きになります。どうです?
あのスゴイ家電の動作も、こんな感じで実現できてしまうのですよ!
自ら判断して動いてくれるので、生物のような賢さや可愛らしさが出てきます。
このために、必要なプログラミング要素を学びました。
“もし、○○だったら△△して、そうでなければ××する”ような判断と行動のルールを与えるもので、“if ○○ { △△ } else { ×× }”の形式で記述します。
条件分岐といって、プログラムには大切な要素です。
これがなければ、ゲームソフトも紙芝居がせいぜいです。
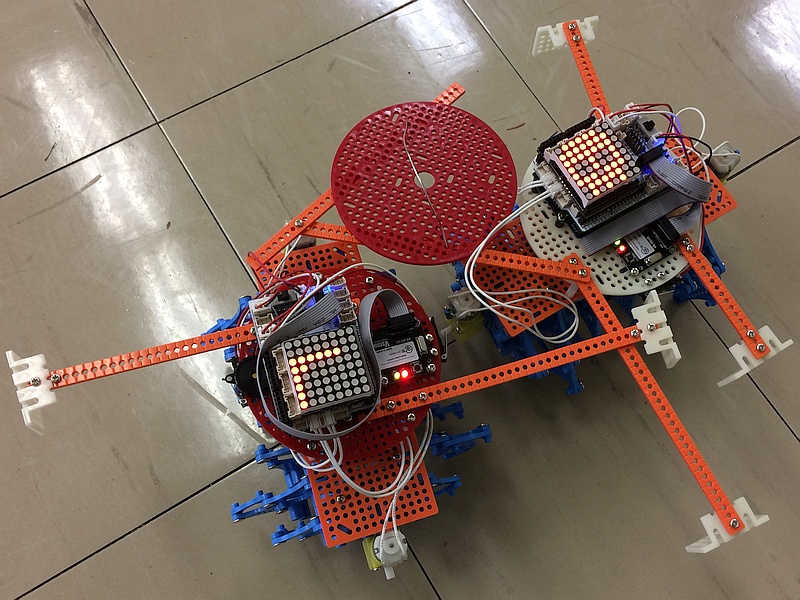
最終日の2日目は、『天下一ロボット武道会』と銘打ち、ラジコン操縦プログラムを転送したロボット同士で一騎打ちを繰り広げます。
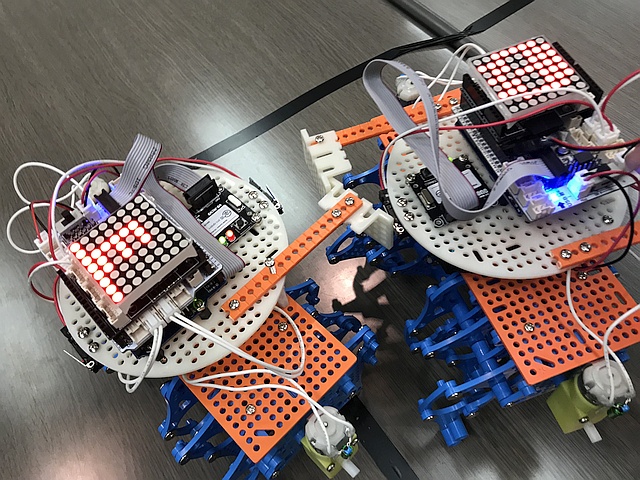
ゲーム性を高めるために、ハード的・ソフト的に改造を加えます。
「感じる」タッチセンサー2個をロボットの前後に付け直し、打たれるとヒットポイント(HP)を失う“急所”に仕立てます。
相手の“急所”を突くための矛(ほこ)を装備します。
8×8ドットLEDマトリクスを装着し、ロボットのステータス(HP、スタミナ、無敵モード、勝敗宣言)を表示させます。
スピーカも繋ぎ、「敗北の悶絶」や「勝利の雄叫び」に備えます。

各自で特性パラメータ(初期HP、スタミナ消費/回復速度)を割り振り、バトルフィールドに放って「勝負始め!」
一見単純そうで、パラメータ振りや、攻め・守り・スタミナ回復のための時間/HP消費などの戦略要素が効いてか、これがなかなか面白い!
ゲーム内の戦闘ロボットを現実界に持ち出した感、いや、リアリティはそれ以上(当たり前)です。
この3ヶ月間、多大な時間を費やして組み上げては分解調整を繰り返した末、苦労してスムーズな動きを獲得したロボットは、最後の戦闘を楽しませてくれる堅牢性を見せました。
ハード・ソフトを問わず、様々な面において思い通りに動かず、苦汁を味わうのは、巷の“ロボコン”でも同じです。
いや、全くこの程度では済まされません。
純デジタルのゲーム世界と異なり、現実の闘いは泥臭い作業の積み重ねであることの片鱗も伺えたのではないでしょうか。
2. 今月の課題
<スタートアップ(全コース)>
特にありません
<プライマリーコース>
- オリジナル図形プリント
<ベーシックコース>
- オリジナル課題プリント(3面図+設問)
- 上記授業内容を精読する(概ね3年生以上/低学年は補助の下で)
<ミドルコース>
- オリジナル課題プリント(3面図+設問)
- 上記授業内容を精読する
<アドバンスプログラミングコース>
- 上記授業内容に紹介した動画(YouTube)を視聴する
<プロ1年目コース>
- 上記授業内容を精読する(該当テキストページを見ながら)
- アドバンスプログラミングコースの動画(YouTube)を視聴する
3. 今後の授業スケジュール
◆八幡東2/2→2/9へ一週ずれます。
◆小倉北2月は一週ずつ遅れます。
◆全教室3月は一週ずつ遅れます。
――――――――――【佐藤教室長】――――――――――
[東福間]第1・3土原則<学習ルームでこぼこ>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドプロ
⇒ 1/5, 19, 2/2, 16, 3/9※, 23※
※教室都合の為、3月は一週ずつ遅れます。
[中間]第2・4土原則<なかまハーモニーホール>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドプロ
⇒1/12 第1回 2F会議室1
1/26※第2回 代替施設(未定)
2/9※, 23, 3/16※, 30※
※1/26, 2/9はハーモニーホール利用不可の為、代替施設(未定)で開催します。
※教室都合の為、3月は一週ずつ遅れます。
[小倉北]第1・3日原則<ムーブ>
- 10:00~ ベーシック/プライマリ
- 13:00~ ミドル
- 15:00~ アドプロ/ロボプロ1年目
⇒1/ 6 第1回 5F小セミ
1/20 第2回 5F小セミ
2/10※, (17), 24※, 3/10※, 24※
※教室都合の為、2月・3月は一週ずつ遅れ、10日と24日です。
2/17は臨時振替日(定員8名・有料540円)です。
――――――――――【中野教室長】――――――――――
[八幡東]第1・3土原則<レインボープラザ4F>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドプロ
⇒ 1/5, 19, 2/9※, 16, 3/9※, 23※
※2/2はレインボープラザ利用不可の為、一週ずれます。
※教室都合の為、3月は一週ずつ遅れます。
[小倉南]第2・4日原則<総合農事センター2F>
- 10:30~ ベーシック/プライマリ
- 13:00~ ミドル/アドプロ(/ロボプロ1年目)
⇒ 1/13, 27, 2/10, 24, 3/17※, 31※
※教室都合の為、3月は一週ずつ遅れます。
4. お知らせ
1) IchigoJam初級ゲームプログラミング ~サウンド編~ 終了
12/24(月・祝)北九州パレスにて、14組の方に参加頂きました。
クリスマスの曲を演奏するミュージックボックスを手始めに、電子ピアノ・音当て・○○の達人ゲームへとステップアップしていく中で、多くのプログラミングテクニックに触れました。
次回3/21(木・祝) 開催の講座をお楽しみに。(詳細は2月報でご案内します)
PCNこどもプログラミングコンテスト2018 が 3/3(日)福岡ももち浜SRPホールで開催されます。
12/31応募〆切と時間がありませんが、冬休み中に挑戦してみては如何でしょうか?
レベルは気にしなくて大丈夫! デザインやアイデアで勝負できます!
http://robocobo.sakura.ne.jp/blog/lab/contest2018-2.pdf
2) 東福間教室 2019年1月~リニューアル移転
『学習ルーム でこぼこ』として、老若男女に集まりいただけるスペースに生まれ変わります。
新しい教室でロボットを作ろう!
快速は止まらないけど、改札を出て1分! 遠方からの振替にも利用下さい。
2Fは『実体の無いロボット工房 RoBoCoBo(ロボコボ)』のひみつの研究室になります。
福津市若木台1-1-11-2 (JR東福間駅 若木台口すぐ)
https://www.facebook.com/DecoBocoroom/
3) 11月課題 高得点者 []内は教室と学年
◆プライマリ【7名平均 図形3.4】
5点…末吉[小倉北 年長], 砂川[小倉北 年長]
◆ベーシック【20名平均 図面3.0+設問2.7=5.7】
10点…なし
9点…橋本[小倉南1]
8点…下木[八幡東3], 藤野[八幡東3], 柴田[小倉北3]
7点…中村[東福間3], 光井[東福間2]
◆ミドル【26名平均 図面3.3+設問2.4=5.7】
10点…なし
9点…宮尾[八幡東5], 馬渡[小倉南4]
8点…桑村[中間4], 荒木[小倉北4], 杉本[小倉南6], 橋本[小倉南4]
◆アドバンスプログラミング【3名平均 図面7.0+設問3.5=10.5】
最高15点…山本[中間6]
東福間・中間・小倉北教室 佐藤 / 八幡東・小倉南教室 中野