2.今月の課題
3.今後の授業スケジュール
4.お知らせ
1. 4月授業内容
1.0 <スタートアップ(全コース)>
割愛します。
1.1 <プライマリーコース『ロビット』>

割愛します。
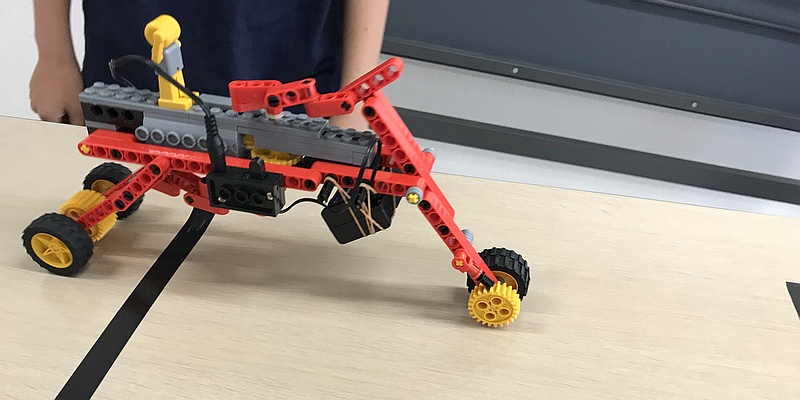
1.2 <ベーシックコース『ぐるぐる進む君』>

二足歩行ロボットです。左右の足が交互(こうご)に前後するのだから、歩くのは当たり前?
よく考えてみます。
人間やアシモのように、片足を上げながら歩くほど高度ではありませんから、地面についたまま前後に往復(おうふく)するだけの足に前も後ろもなく、その場で足を摺(す)るばかりでうまく進みません(*1)。
1日目のロボットがこの形態であり、あまりスマートな歩みではなかったでしょう。
しかし、人間は、ぶかぶかのスリッパを履(は)いたときでも、摺り足をしながら前に進むことができます。
同じ摺り足の動きで後退することもできます。無意識(むいしき)に何かを切り替(か)えています。
そうです、重心ですね。2日目で、ちょうちんアンコウのごとく頭から生えた角(つの)が、その重心移動メカニズムです。
もちろん、付ければいいってものではありません。
角の先に付けたタイヤL(カウンターウェイト=おもり)に揺(ゆ)り回されるわけですから、足の動きとの同調(タイミング合わせ)を考えないと、逆にバランスを崩(くず)してすぐに転んでしまいます。
しかし、このタイミングは30°単位(*2)で調整できますから、後ろに下がる方の足に重心を傾(かたむ)け、前へ出る方の足を浮(う)かせ気味にすれば、見違えるようにスタスタと歩くことができるように変身します。
その理由を詳しく見てみましょう。
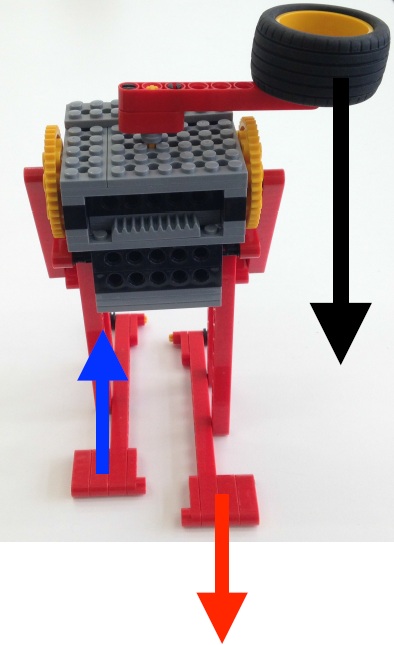
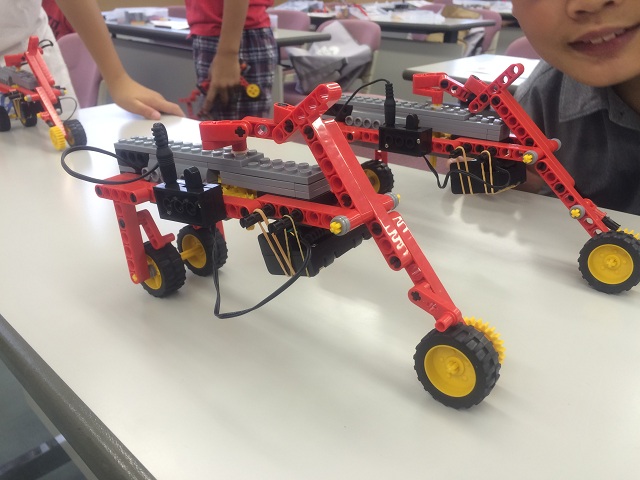
写真のように、ロボットに向かって右側にタイヤLがあるときを考えてみます。
タイヤLは黒矢印(↓)の重力を受けています。この重力は、角を伝って、ロボットを右側に倒(たお)そうと作用します。
つまり、向かって右側の足には赤矢印(下向き↓)の力が、左側の足には青矢印(上向き↑)の力が加わり、向かって右側の足は重く、左側の足は軽くなるのです。
左右の足への重みが変わることで、どんな良いことがあるのでしょうか。
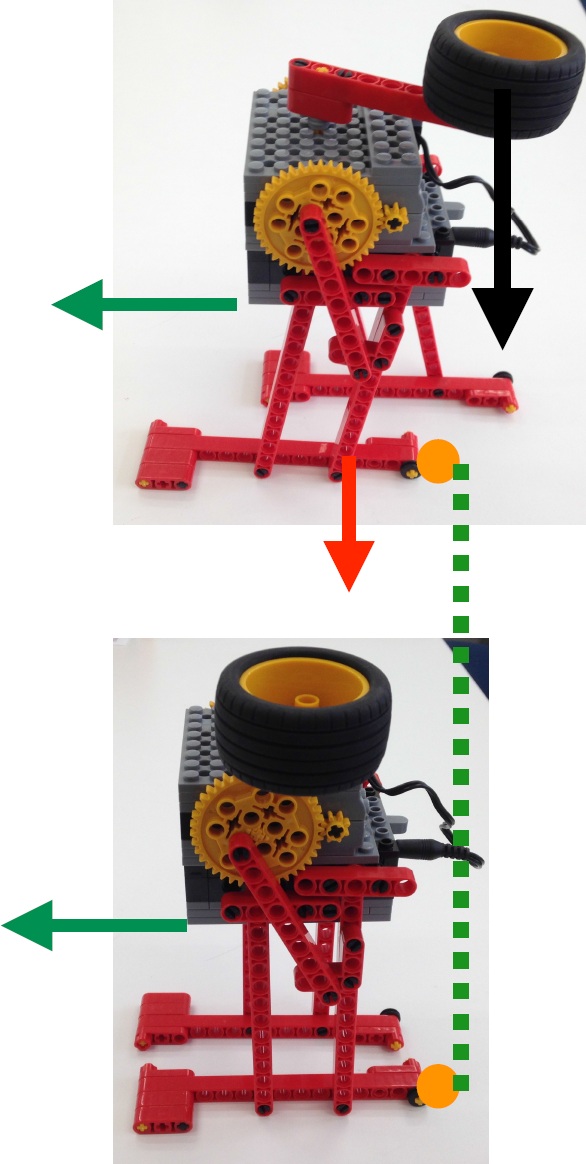
写真は、ロボットの左足がめいっぱい前に出て、これから後ろに下がろうとする瞬間です。
このとき、左足には赤矢印(↓)の力が加わっているため、床との摩擦(まさつ)力が強く働き、滑(すべ)りにくくなります。
そのため、左足を後ろへ動かそうとする力は、ロボット上体を緑矢印(←)の方へ動かそうとする力となって、前進させるのです。
同時に、軽くなっている方の右足は、床との摩擦力が弱いために、滑りながら前へせり出し、次の一歩に備(そな)えることができます。

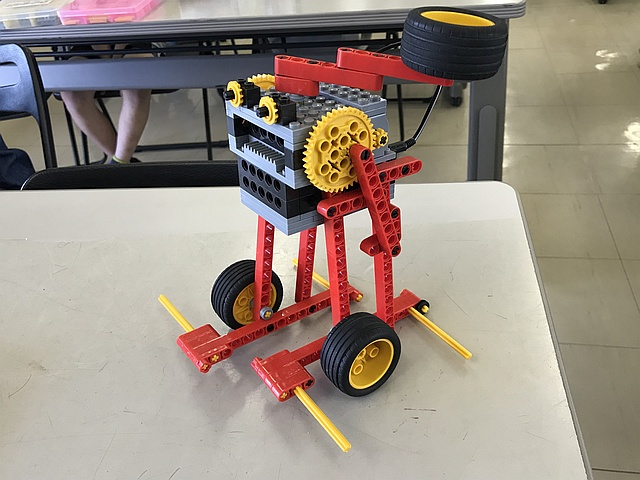
もっともっと速く歩かせるために、電圧アップ(電池4→5本)したり、脚(あし)を長くして歩幅(ほはば)を大きく取ったりしてみましょう。
すると、安定感がなくなり、上体がヨタヨタに振(ふ)れようとする動きを、強めのカウンターウェイト(*3)でキャンセルし、さらに、足裏(あしうら)を広げて転びにくくします。
または、ラチェット(*4)を知っている人は、スケートのようにスーッと滑らせることも夢ではありませんよ!
二足歩行ロボットというのは、なかなか奥深いテーマなのですよ。
*1 足にグロメットを付けると、後方へ蹴(け)る摩擦力が働き、少し前進するようになりますが、逆に足を前に戻すときには、この摩擦力がじゃまになります。
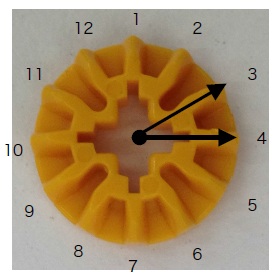
*2 タイヤLを回す角の根元には、12の歯をもつマイタギアが取り付けられており、これが別のマイタギアと噛(か)み合って回されています。
つまり、噛み合わせを1つずらして取り付けるということは、角度にして 360÷12=30°ずつ変更できるということですね。
*3 てこの原理により、重いほど、角を長くするほど効く。
*4 一方向へのみ回転させる機構。ミドルコース『ロボワーム』を参照。
1.3 <ミドルコース『ロボワーム』>
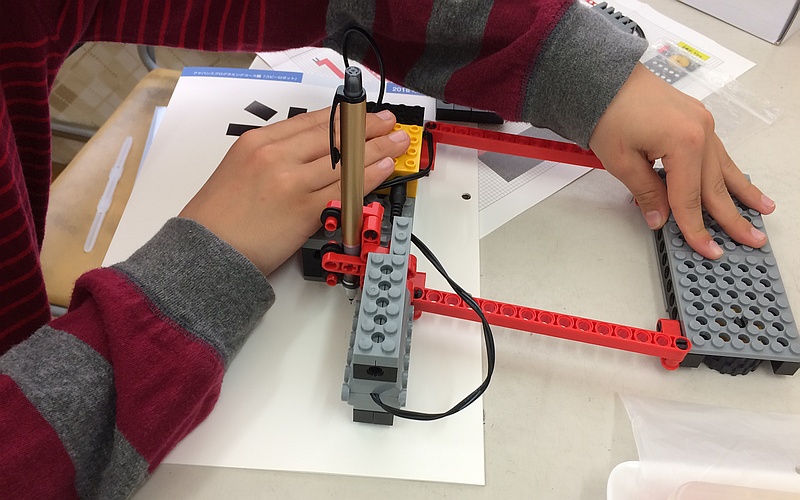
見た目は3輪バイクのようですが、尺取り虫(シャクトリムシ)をモチーフにしたロボットです。
1日目では、前輪の付いたロッドを前後に往復させています。
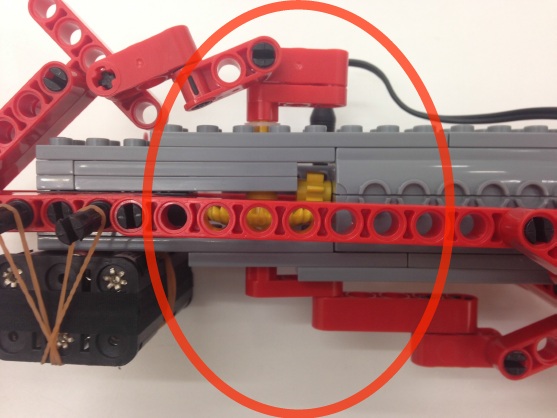
この動きは、クランクというリンク機構を用いて、モーターの回転運動を往復運動に変えて実現しています。
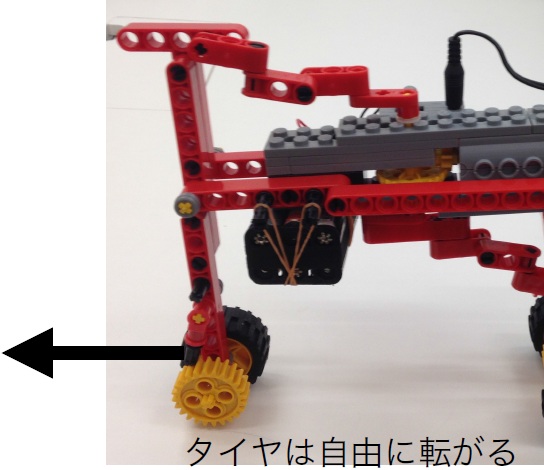
しかし、ロッドの往復に合わせて、前輪は前後に転がるだけであり、推進力とはなりません。

ところが、ただ1点の部品(ペグS)を装着するだけで、見違えるほど前進するように変わります。
ラチェットという機構で、一方向への回転のみを許し、反対方向へは回らない仕掛けです。

皆さんの身近なところでは、自転車のペダル(正確にはチェーンで駆動される後輪のハブ内)に使われており、前方向にはしっかり噛み合って回転を伝えますが、逆方向にはチッチッチと音を立てて空回りする仕組みにより、ペダルを休めても車輪は回り続けることができます。
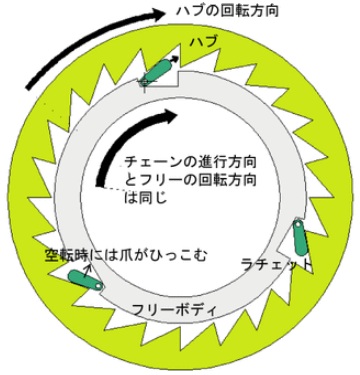
写真は、後輪ハブ(車軸部分)を分解したものです。
大きな力に対応できるよう、ギアの周りにラチェットが3つ付いていますが、基本的な仕組みは、ギアMとペグSの噛み合わせ方と同じです。
このラチェット機構を実現するために、前輪に重ねたギアMの歯にペグSの角を当てました。
すると、ロッドの往復に合わせて、前輪と後輪が交互に前へ転がることを繰り返し、本体が前進するようになりました。
まるで、尺取り虫が胴体を曲げたり伸ばしたりして進む様子です。
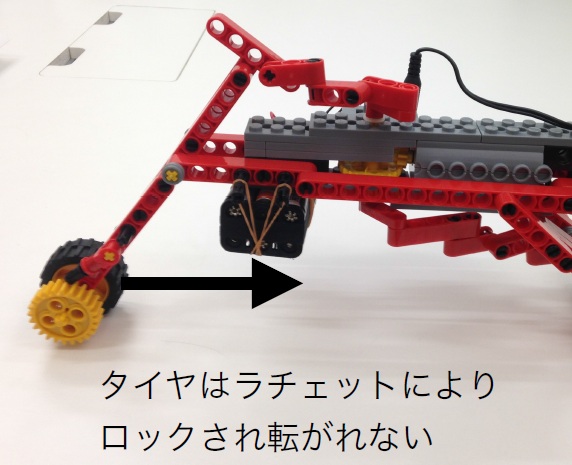
後輪が前へ転がるのは、ロッドが後ろへ戻る際に前輪が逆回転しないようロックされ、本体(と一体化した後輪)が前輪に引っ張られるようになったためです。
前輪が前へ転がる際は、本体(および後輪)は止まったままか、むしろ反動で少し後退します。
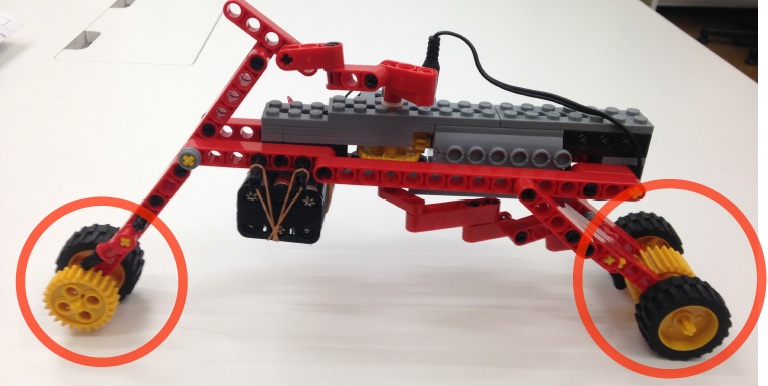
2日目に、後輪にも同様に往復するロッドとラチェットを組み付けました。
これで、後輪の後退も防げるようになり、推進効率が上がりそうです。
前輪と後輪のロッドが往復するタイミング(のズレ)は自由に変更できますが、一番スムーズに前進するタイミングはどのようなものでしたか?
どうあがいても(前後のロッドで漕ぐタイミングがどんなでも)、前後輪ともラチェットを付けて後退を阻止(そし)するのだから、1日目(前輪ラチェットだけ)のロボットよりは前に進みやすくなると思うでしょう?
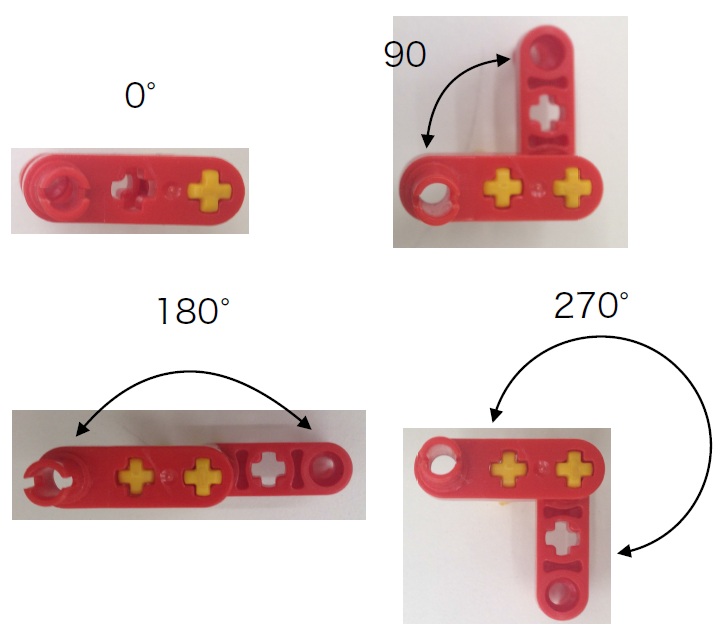
ところが、ロボットを横から見て、前後のロッドがハの字形に開いたり閉じたりするようなタイミング(前後クランク位相差0°)が最も優れます。
同じ向きに前後するようなタイミング(位相差180°)でクランクに取り付けると、恐ろしく推進効率が下がり、ちょっとの坂道でも上れなくなります(*1)。
クランク位相差90°では、その中間といった感じです。
何故でしょうか?
これは“スケーティング”の要領に似て、先行する前脚と、蹴り出す後ろ脚の機能分担ができるからです。
人間が歩けるのも、尺取り虫が進めるのも、地面を捉(とら)える後部があってこそ、前部が地面上を浮いて(または滑るように)進めるわけです。


だって、両脚を揃えて前後させようとしても、上体が前後に傾くだけで、何を支えにして進めと言えるでしょうか?
『ロボワーム』のように2本脚が前後に付いていても、同じことです。
尺取り虫は知っているのでしょうか。
*1 平坦なら少し進みますが、本体を前後に振る“反動”で動いている程度で、後ろに下がったとしても不思議ではありません。
1.4 <アドバンスプログラミングコース『コピーロボット(1)』>
《下記を参照下さい》
http://robocobo.sakura.ne.jp/blog/robot/adv1-1804.pdf
1.5 <プロ3年目コース『不思議アイテムIII-1(1)』>
春タームは、赤外線で遊びます。
赤外線(Infrared Ray, IR)とは何でしょうか。
(人間の)目に見えない光の一つ(波長領域)であって、「目に見える可視光線の中で波長が最も長い赤色光よりもさらに長いために見えない、限られた波長領域の(赤から少し外れた)光」と言えます。
可視光線の波長が約400nm~800nmの範囲であるのに対し、赤外線は800nm~1,000,000nm(1mm)と長く広範囲の波長領域を指し(*1)、波長が長くなるにつれ、近赤外線・中赤外線・遠赤外線と分類されます。
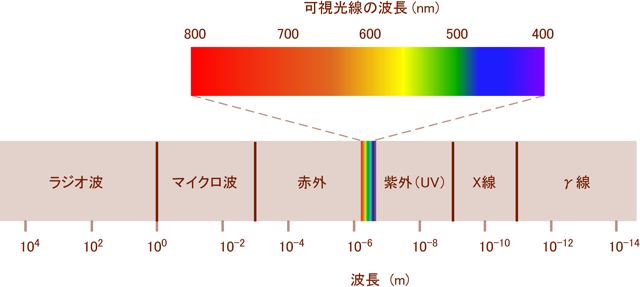
このうち、赤色の可視光線に近い特性をもつ近赤外線は、家電のリモコンや赤外線カメラ、携帯電話間の赤外線通信(もう時代遅れ?)に使われています(*2)。
さて、市場には、あらゆるリモコンの信号を読み取り、“真似”できるという「学習リモコン」なるものが存在しますね。
佐藤が初めて目にした時は、リモコンの通信方式も知らずに、凄いモノが作れるもんだと感嘆しましたが、
下記の条件のお陰で、Arduino環境でもライブラリが揃っているように、(マイコンがあれば)比較的容易に作成できます。
1) 波長950nm近傍の近赤外線を使う
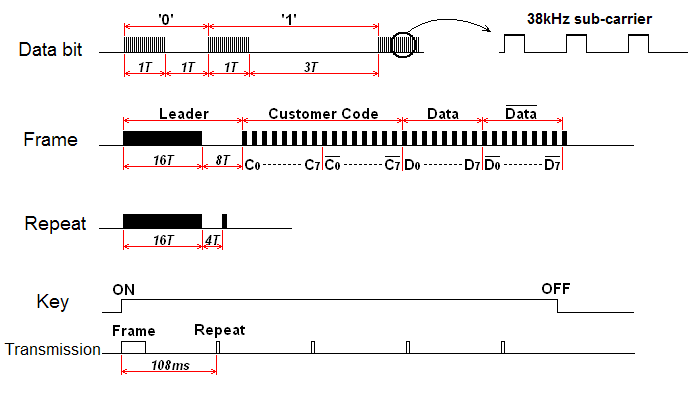
2) 周波数38kHz前後の明滅パルスを搬送波として使う(*3)
3) 単位時間500μs前後のパルス位置変調(Pulse Position Modulation, PPM)方式で符号化(0/1表現)する
4) 一方的に送り付ける用途(双方向通信ではなく、届いたかどうかは無関心)
5) 主に使用されている送信フォーマットは数種類しかない
1)~3)の共通性によって、単位符号(0/1)が読み取れますので、5)のフォーマットが何でも、プログラム次第で解釈できます。
事実、携帯電話やプリンタ間の写真転送などで使われる双方向のIrDA通信規格とは異なり、赤外線リモコンの通信プロトコル(データフォーマット)には明確な標準規格が無く、各社各様です。
但し、主に使用されているのは下記3方式のようで、SONYフォーマットを除き、1フレーム(1回の送信データ列)当たり、カスタム(メーカー識別)コード16bit + データ(コマンド)コード16bit = 32bit前後で構成され、約100ms毎に(ボタンが押されている間)繰り返し送信するという類似性があります。
・NECフォーマット … 主にSONY製以外のAV機器
・家製協(AEHA)フォーマット … 主に一般(白物)家電
・SONYフォーマット … SONY製品のみ
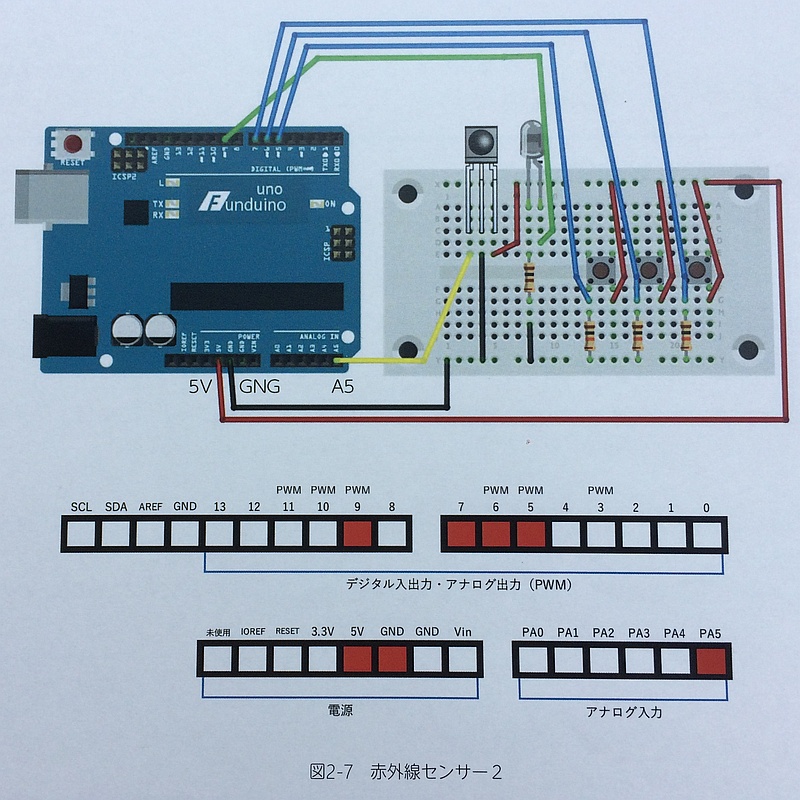
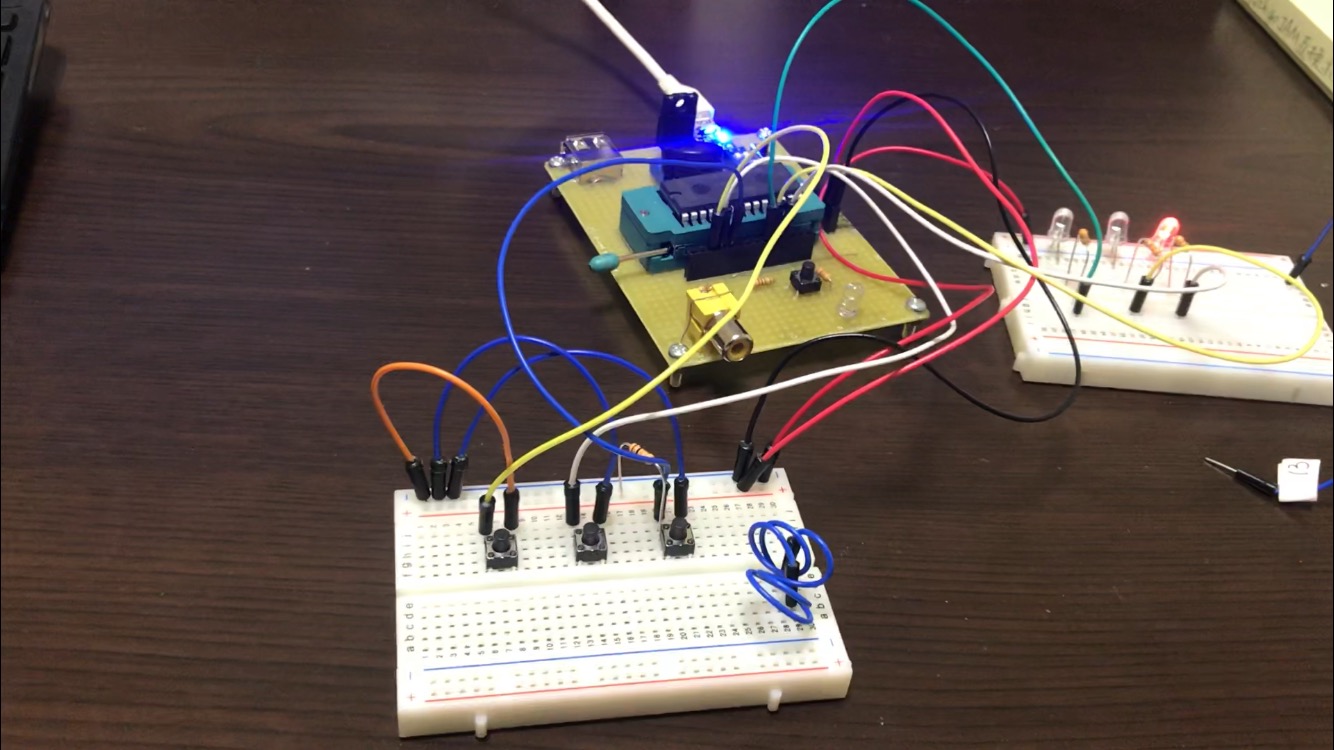
このような背景により、マイコンに赤外線LEDと赤外線受光素子を繋ぐだけで、家電リモコンの信号をプログラム[IRrecvDump]で“傍受”し、プログラム[IRJackEx]で“真似”したり、別のコマンドデータに置き換えて“電波ジャック”したりできるようになります。
実際、扇風機や照明器具等の一般家電では、ブレッドボード上に組んだタクトスイッチをリモコンのボタン代わりにして操作することができました。
複数コードのシーケンス(序列)を認識して作動する家電や、テレビ等の高機能AV機器では(?)成功率が低かったようです。
ライブラリが対応していないだけで、プロトコルや適正タイミングさえ明確に分かれば、Arduinoで再現できるかもしれません。
また、リモコンのボタン毎の信号を区別できるということは、専用品を作らなくても、付属の汎用リモコンや適当な家電リモコンで、オムニホイール操縦プログラム[IRrobot]のようにロボットを制御(前進・後退・旋回コマンド等)できるということです。
あるいは、プログラム[IRText]のように、文字コードをデータコードに埋め込んで送信し、受信側で取り出して8×8マトリクスLEDに表示することにより、メッセージ伝送もできました。
文字コードを暗号化して、第三者に傍受されても解読不能にすることもできますよ!
赤外線通信を使って、他にどんなアプリケーション(応用)が考えられるのか、次月も探求して参りましょう。
【出展・参考文献】
http://elm-chan.org/docs/ir_format.html
http://www.asahi-net.or.jp/~gt3n-tnk/IR_TX1.html
http://akizukidenshi.com/download/k4174_format.pdf
https://ja.wikipedia.org/wiki/%E3%83%AA%E3%83%A2%E3%82%B3%E3%83%B3
*1 広範囲と言っても、0.01nm以下から100,000,000,000,000nm(百km)以上の波長まで連続的に存在する電磁波のうちでは、ごく狭い帯域の(不可視)光線に過ぎません。
*2 光のように真っ直ぐしか飛ばず、電波のようには拡がりませんので、一所懸命リモコンをテレビへ向けなければなりませんね。
電波式リモコン(SONYおき楽リモコン等)の使い勝手を知ると戻れませんが、赤外線式の方が低コストなのです。
*3 この搬送波1パルスの有無がデータ符号1bit(0/1)を表すわけではありません。
赤外線の物理的な放射タイミングがこの周期(1/38kHz≒26μs)毎に発生し、実際の放射パルス(の複数個の連続)の有無(の組合せ)によって、1bit(0/1)を表します。
つまり、赤外線を(物理的な意味で)放射している期間は38kHzで点滅しおり、搬送波を使わず連続点灯させる場合よりも少ない電力で高いピーク輝度を出力できます。
また、一般に、信号を搬送波に乗せる(搬送波を信号で変調する)方式では、特定の周波数成分だけを拾うフィルタ回路を経由して受信(またはプログラムで信号処理)することにより、混線回避やノイズに強い通信ができるようになります。
2. 今月の課題
<スタートアップ(全コース)>
特にありません(アドバンスプログラミング生は2017年9月報を参照)
<プライマリーコース>
- オリジナル図形プリント
<ベーシックコース>
- オリジナル課題プリント(3面図+設問)
- 上記授業内容を精読する(概ね3年生以上/低学年は補助の下で)
<ミドルコース>
- オリジナル課題プリント(3面図+設問)
- 上記授業内容を精読する
<アドバンスプログラミングコース>
- 上記授業内容を精読する
<プロ3年目コース>
- 上記授業内容を精読する(該当テキストページを見ながら)
3. 今後の授業スケジュール
◆中間5/12は代替施設『北九州ハイツ』で開催します。
◆東福間5/19セミナーの為、時間変更(13:30→9:30/15:30→16:30)させて頂きます。
◆東福間5/19体育祭の為、日時変更(5/19 17:30中止→5/26 9:30)させて頂きます。
◆八幡東5/19セミナーの為、時間変更(13:30→15:30)させて頂きます。
――――――――――【佐藤教室長】――――――――――
[東福間]第1・3土原則
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドプロ
⇒ 5/5, 19※, 6/2, 16, 7/7, 21
※5/19セミナーの為、時間変更(13:30→9:30/15:30→16:30)させて頂きます。
5/19体育祭の為、日時変更(5/19 17:30中止→5/26 9:30)させて頂きます。
[東福間プロ]第2・4日原則
- 15:30~ プロ3年目
⇒ 5/13, 27, 6/10, 24, 7/8, 22
[中間]第2・4土原則<なかまハーモニーホール>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドプロ
⇒5/12※第1回 北九州ハイツ 2F嵐山
5/26 第2回 ハーモニーホール3F会議室2
6/9, 23※, 7/14, 28※
※5/12は代替施設『北九州ハイツ』で開催します。
※6/23, 7/28はハーモニーホール利用不可の為、代替施設(未定)で開催します。
[小倉北]第1・3日原則<ムーブ>
- 10:00~ ベーシック/プライマリ
- 13:00~ ミドル
- 15:00~ アドプロ
⇒5/ 6 第1回 5F小セミ
5/20 第2回 5F小セミ
6/3, 17※, 7/1※, 15※
※6/17はムーブ利用不可の為、『商工貿易会館(シティプラザ)』で開催します。
※7月はムーブフェスタの為、6/2まで確定できません。代理施設での開催となる可能性があります。
――――――――――【菅本教室長】――――――――――
[とばた]第2・4土原則<ウェルとばた8F>
- 13:00~ 全コース(プロを除く)
⇒ 5/12, 26, 6/9, 23, 7/14, 28
――――――――――【中野教室長】――――――――――
[八幡東]第1・3土原則<レインボープラザ4F>
- 13:30~ ベーシック
- 15:30~ ミドル
- 17:30~ アドプロ
⇒ 5/5, 19※, 6/2, 16, 7/7, 21
※5/19セミナーの為、時間変更(13:30→15:30)させて頂きます。
[小倉南]第2・4日原則<総合農事センター2F>
- 10:30~ ベーシック/プライマリ
- 13:00~ ミドル /アドプロ
⇒ 5/13, 27, 6/10, 24, 7/8, 22
4. お知らせ
1) KIGSセミナー聴講のお薦め[再掲]ロボット教室で力学のセンスを学んでいる小5以上の皆さんにお薦めします。
⇒強い興味のある場合を除き、小4以下の方はご遠慮下さい。
⇒当日の東福間・八幡東教室の授業時間を一部変更させて頂きます。
⇒お申込みは佐藤・中野でも承ります。お早めに。
(個別の方も佐藤・中野までご一報頂けると幸いです)
【科学の歴史(1) ~力学はどのようにして創られたか】
力学(りきがく)とは、物体にはたらく力や、物体の運動を対象とする科学のことです。
その歴史は古く、17世紀のガリレオやニュートンによって基本的な法則や原理が発見され、続く18世紀のオイラーなどの手で、現在のような形にまとめられました。
このような発展の流れを、わかりやすく解説します。
時 間 5/19(土) 13:00~15:00
会 場 北九州イノベーションギャラリー(KIGS)内 プレゼンテーションスタジオ
参加料 無料
講 師 有賀 暢迪(ありが のぶみち)氏 国立科学博物館 研究員 博士
申込み https://www.kigs.jp/event/2018/03/288.php
【科学の歴史(2) ~明治日本、西洋の科学と出会う】
時 間 12/1(土) 13:00~15:00(予定)
2) 小倉北ロボティクス・プロフェッサー(ロボプロ)コース開講[再掲]
アドプロ1年以上履修生・外部生を対象に、小倉北教室で今秋9月~開講予定で進めます。
対象の方へご案内予定(3月中)が遅れており申し訳ありません。
条件面の最終調整中につき、もう暫く(5月中)お待ち下さい。
なお、他教室の方は小倉北教室へ転属となります。
また、本コースは佐藤・中野の完全共同運用になります。
3) 小3以上向け電子工作・マイコンプログラミング講座[予告]
教室独自に、何とか本年度中に定例スタートできるよう鋭意努力中です。
景品開発が後回しになっておりますが、宿題ポイントを貯めて損はさせません!
4) 3月課題 高得点者 []内は教室と学年
◆プライマリ【9名平均 図形4.7】
5点…牛嶋[中間2], 河原[中間1], 長友[八幡東 年長], 板脇[小倉北 年長], 柴田[小倉北2], 米山[小倉北1], 林田[小倉南 年長]
《お詫び》
ブロック数が28~43(想定36)と多重解になる不適切な問題でした。
悩ませた生徒さん・保護者の方へお詫びします。
◆ベーシック【18名平均 図面2.8+設問2.1=4.9】
10点…なし
9点…なし
8点…久保田(新)[小倉北4]
7点…宮尾[八幡東4], 森崎[八幡東2], 大和(彩)[小倉北3]
◆ミドル【22名平均 図面2.6+設問2.2=4.8】
10点…なし
9点…橋本[小倉南3]
8点…辻[小倉南6]
◆アドバンスプログラミング【2名平均 図面9.5+設問3.5=13.0】
最高14点…江平[小倉北7]
東福間・中間・小倉北教室 佐藤 / 八幡東・小倉南教室 中野