2.6月の課題
3.5月の解答
4.7月の授業予告
5.今後の授業スケジュール
6.お知らせ
1. 6月授業まとめ
1.0 <スタートアップ(全コース)>
割愛します。
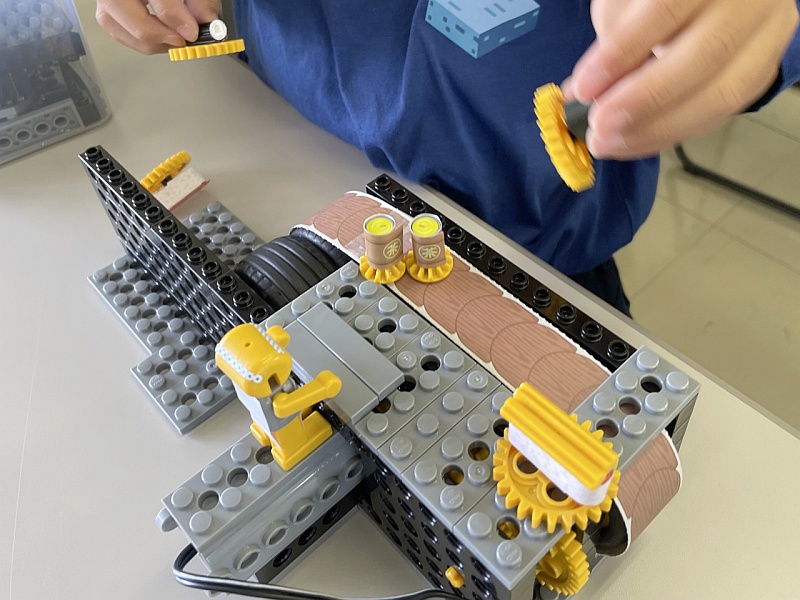
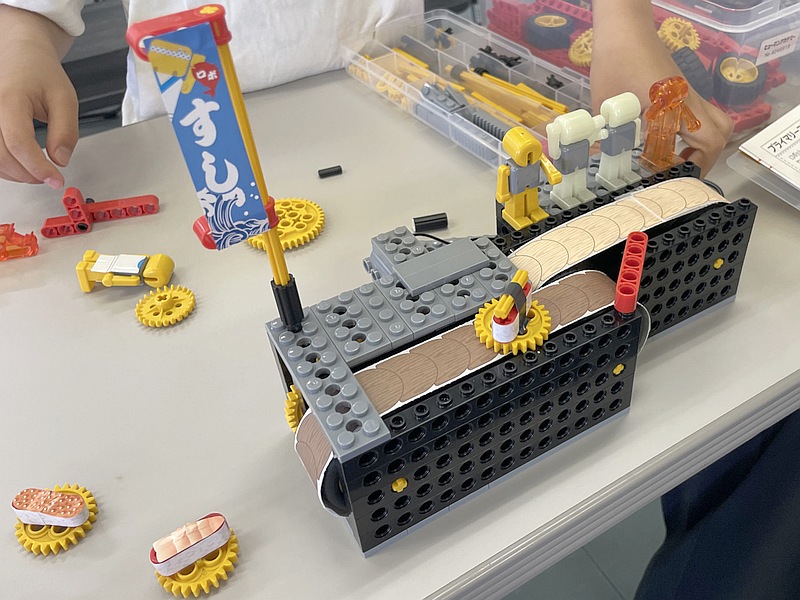
1.1 <プレプライマリーコース『スシロボー』>
割愛します。
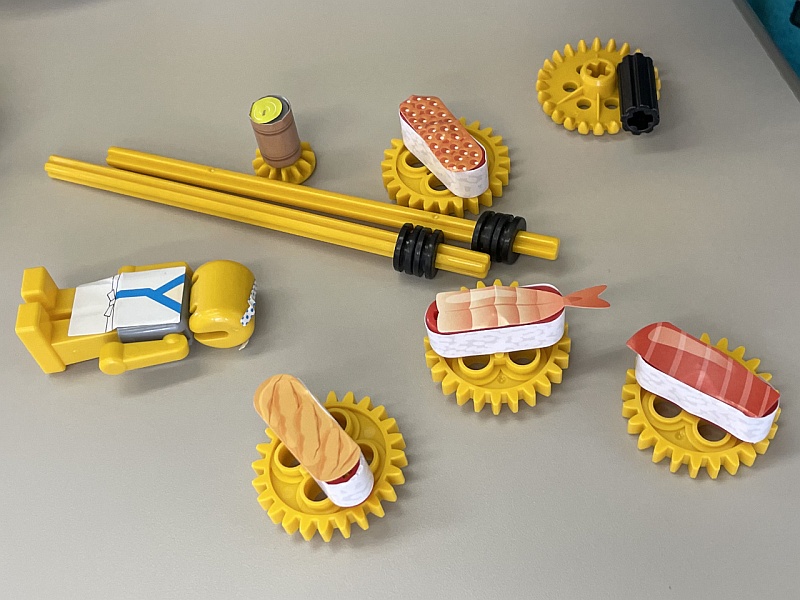

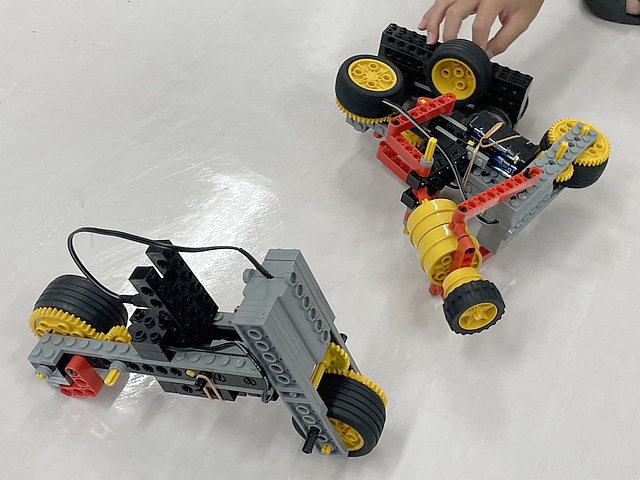
1.2 <プライマリーコース『チャリダー』>
割愛します。

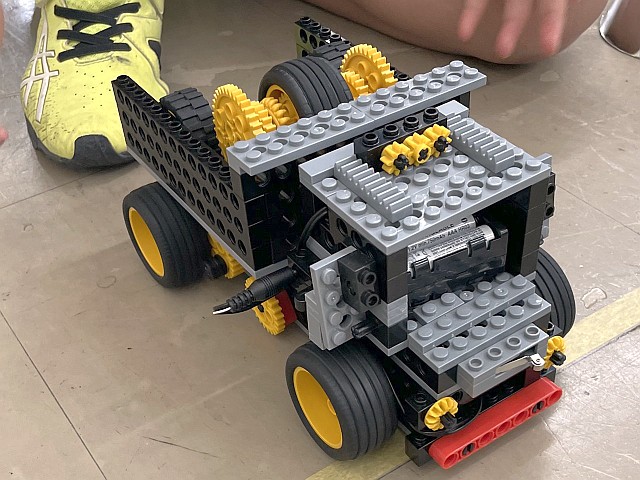
1.3 <ベーシックコース『ダンプくん』>
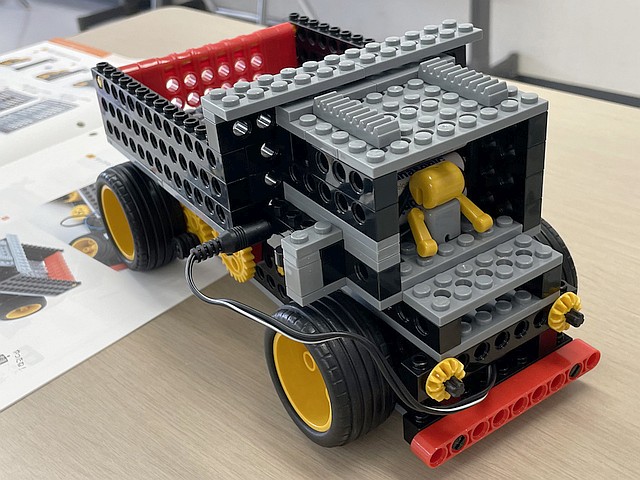 はたらく車、ダンプカーです。
はたらく車、ダンプカーです。ダンプカーは、荷台を斜(なな)めに持ち上げて積み荷を下(お)ろせるトラックですが、ダンプくんもその動作ができます。
荷台を動かすだけなら簡単そうですが、車ですから、走らせたいですね。
工事現場での作業を思い返すと、積み荷を下ろすときは車が止まっています。
うーん、荷台を上げるときはタイヤを回さない仕掛(しか)けも欲(ほ)しいですね。

車らしく見せるためには、走行している時間の方を長くとりたいです。
荷台をパカパカと上下させながら、ちょっと走っては止まるを繰(く)り返すとカッコ悪いですもんね…
ただ、使えるモーターは1個だけ。なのに機能は盛(も)りだくさん。ちょっと欲張(よくば)りですね。
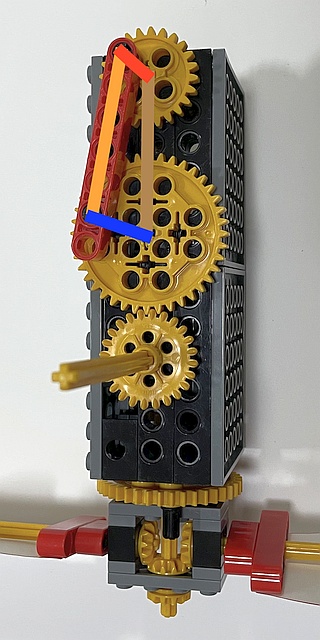
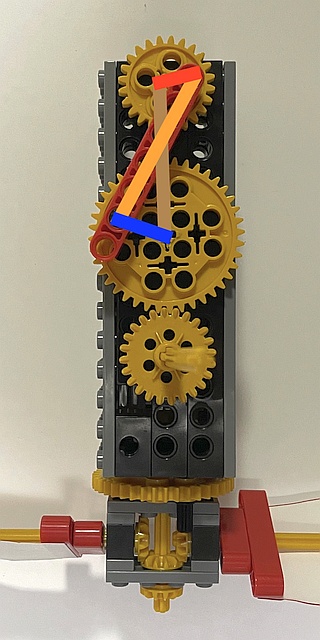
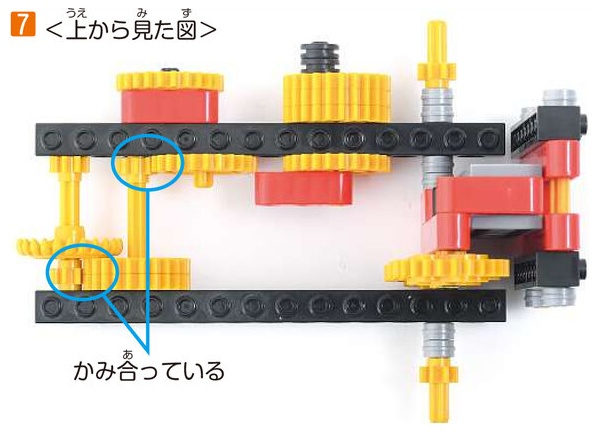 これを実現するために、ダンプくんで使うギアはとても多くなっています。
これを実現するために、ダンプくんで使うギアはとても多くなっています。テキストp.11 写真[7]<上から見た図>の各ギアには下記の役割(やくわり)があります。
●左上のギアMうす(ロッド3アナ付き)
このギアは、回転中心が偏(かたよ)っている偏心(へんしん)ギアなので、振(ふ)り回すような動きをします。
これにより、ときどき右にある3重のギアMうすと噛(か)み合うだけで、ほとんどの時間は空回りすることになります。
●中央の3重ギアMうす(グロメット・ロッド3アナ付き)
このギアが回されると、荷台を持ち上げるロッド3アナも回ります。
よって、左の偏心ギアがときどき嚙み合ったときに荷台が上がるようになります。

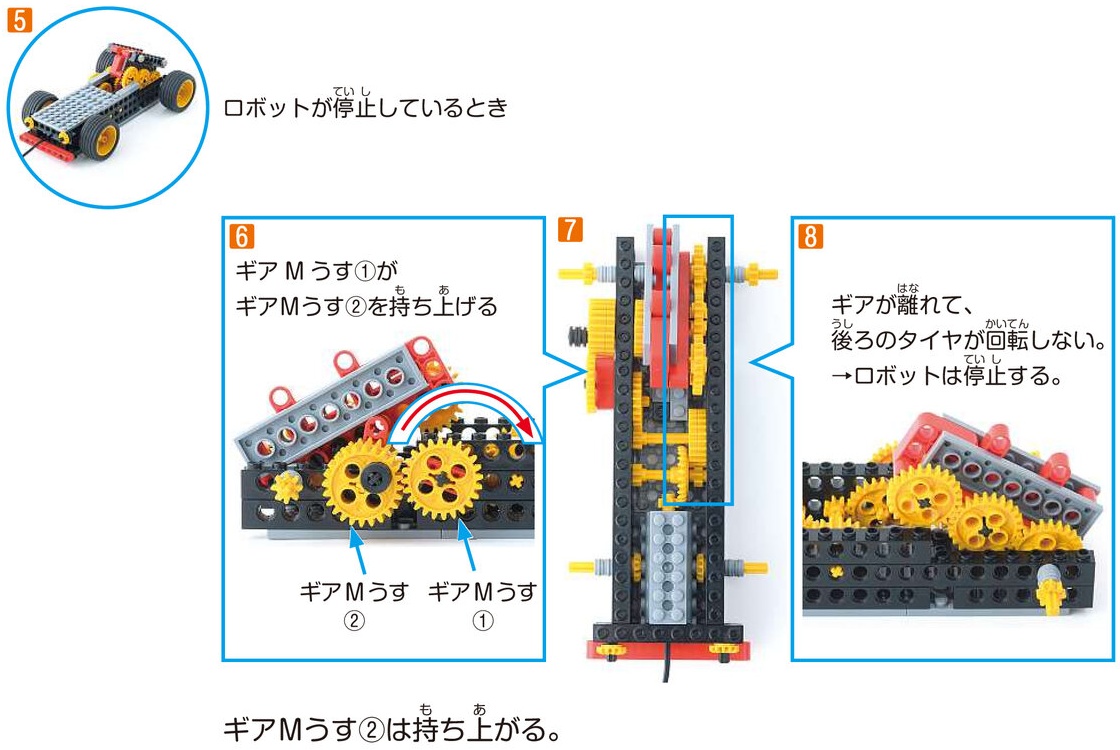
 この仕組みによって、しばらく走行しては荷台を持ち上げる動作を繰り返すことができました。
この仕組みによって、しばらく走行しては荷台を持ち上げる動作を繰り返すことができました。この「ときどき動かす」ことを間欠(かんけつ)動作とよびます。
小雨の日のワイパーや、時計の秒針(びょうしん)(*1)がそうですね。
荷台をときどき持ち上げる仕組みは分かりました。
では、走ったり止まったりする機能はどうでしょうか。
 走行中は、さして変わった動作はなく、テキストp.11 写真[5]の通り、ギアMうすと3連のギアMを並(なら)べてタイヤへ回転を伝えています。
走行中は、さして変わった動作はなく、テキストp.11 写真[5]の通り、ギアMうすと3連のギアMを並(なら)べてタイヤへ回転を伝えています。ところが、3連のギアMは、荷台を支えるフレーム(ロッド9アナ)に取り付けられているため、荷台と一緒になって動きます。
こうして、荷台が持ち上がると3連のギアMがギアMうすから外(はず)れ、回転を伝わらなくしているのです。
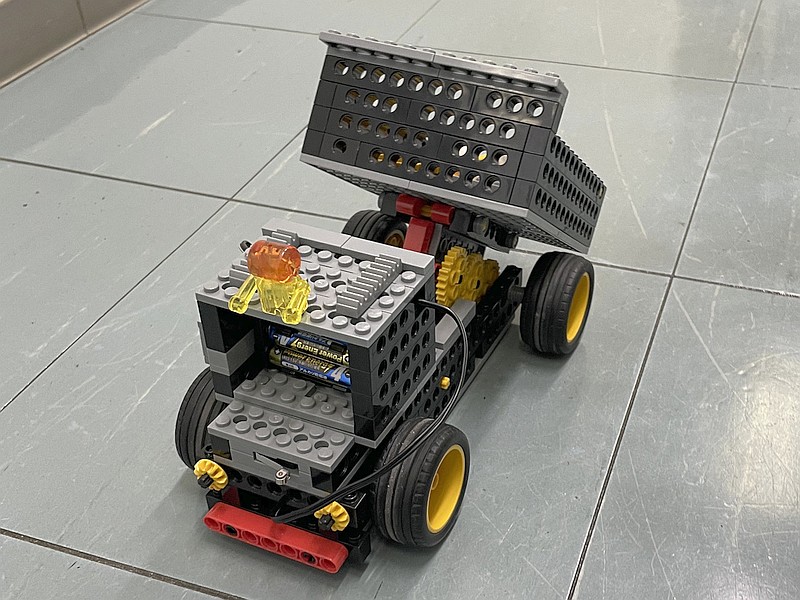
 荷台を上げるときだけ停車(ていしゃ)するなんて、本当によくできた仕掛けですが、荷台がスムーズに上がらず、ギクシャクした動きになりがちでした。
荷台を上げるときだけ停車(ていしゃ)するなんて、本当によくできた仕掛けですが、荷台がスムーズに上がらず、ギクシャクした動きになりがちでした。それは「持ち上げる」なんてものではなく、「跳(は)ね飛ばす」ような勢(いきお)いで、
そのタイミングになると、スピードダウンしてモーターが苦しそうに唸(うな)った後、いきなり「バーン!!」と開くのです。
これは、ギアMうすと次のギアMが互(たが)いに下向きに巻き込む方向に回転しているせいで、ギアMうすとの噛み合いが上向きに外れにくいからです(*2)。
 走行の負荷(ふか)が小さい(下り坂や手で押す)ときはスムーズに外れやすいのですが、
走行の負荷(ふか)が小さい(下り坂や手で押す)ときはスムーズに外れやすいのですが、負荷が大きい(上り坂や積み荷が重い)ほど外れにくくなって、跳ね上げ力が増(ま)します。
走行の負荷が大きいとは、タイヤを回しにくいことであり、それを回す全てのギアやシャフトにも負荷が掛(か)かって、ギアの歯同士は強く当たり、シャフトは少し捻(ね)じれます。
 つまり、ギアMうすによって次のギアMの歯が下向きに押し付けられているところに、ギアM(荷台)を上げようとして歯がさらに強く当たり、シャフトはより捻じれ、その捻じれ力がバネのように溜(た)まって、ギアが外れたときに一気に解放されるのです(*3)。
つまり、ギアMうすによって次のギアMの歯が下向きに押し付けられているところに、ギアM(荷台)を上げようとして歯がさらに強く当たり、シャフトはより捻じれ、その捻じれ力がバネのように溜(た)まって、ギアが外れたときに一気に解放されるのです(*3)。解決方法は、負荷を軽くする(タイヤが軽く回れるようブッシュをしめ付けない/下り坂/手で押す)他になく、改造もむつかしく、この動作が気に入らない生徒さんが気の毒でした…。
 ベーシックのロボットの中でも最高レベルのメカニズムですが、ギアボックスさえ完成してしまえば、あとはトラックとしての架装(かそう=運転席や荷台の作りつけ)だけです。
ベーシックのロボットの中でも最高レベルのメカニズムですが、ギアボックスさえ完成してしまえば、あとはトラックとしての架装(かそう=運転席や荷台の作りつけ)だけです。ドライバーを乗せて、瓦礫(がれき)を積んで、はたらく車のでき上がりです。
 2日目の最後に、決められたエリア内に積み荷を下ろす“合法投棄”ゲームをしました。
2日目の最後に、決められたエリア内に積み荷を下ろす“合法投棄”ゲームをしました。エリアから外れたら不法投棄ですよ!!
エリア内で荷台が上がるように、スタート地点だけでなく、間欠ギアの位置にも注意して発進させます。
間欠ギアの位置は、スタートして荷台が持ち上がるまでの距離を決めるものですから、毎回同じに合わせた方が良さそうです。






*1 1秒ごとの間欠(ステップ式)ではなく、ずっと回る秒針(スイープ式)もあります。
*2 よって、この問題は、ギアMうすと3連ギアMの回転方向を逆の設計にすれば解決すると思われますが、改造は簡単ではなく、設計改良を要望します。
*3 このときの主な負荷は、走行ではなく(上げにくい)荷台を上げる方であり、そちら側のシャフト群に多く捻じれエネルギーが溜まると考えられます。
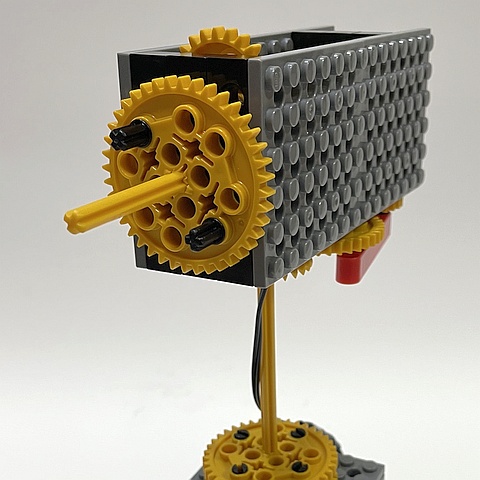
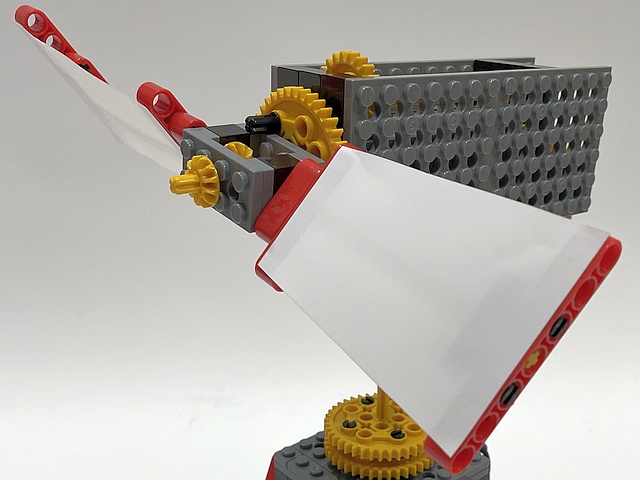
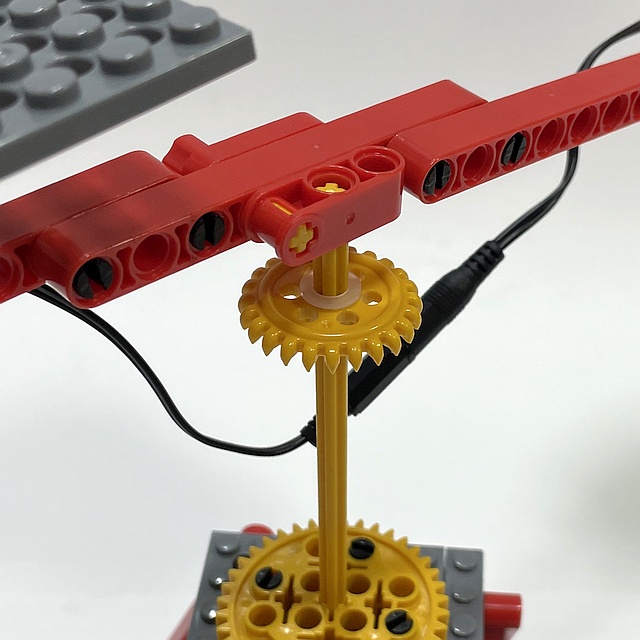
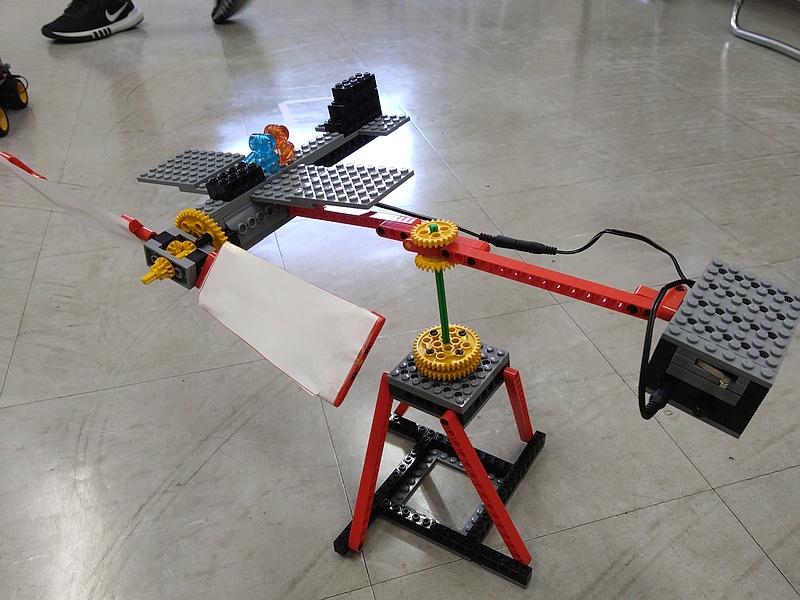
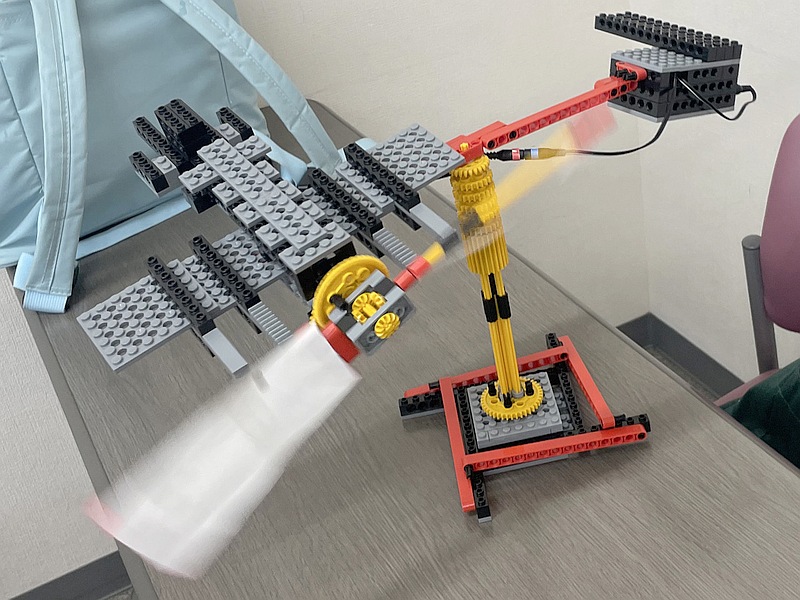
1.4 <ミドルコース『扇風丸』>

プロペラ風力を利用した唯一無二のマシンです。
1日目のロボットは、首振り扇風機です。
プロペラが風力を生み出すには、回転面(回転半径が作る垂直面)に対して、プロペラの羽根(ブレード)がある程度の角度で傾いてなくてはなりません。
この角度のことをピッチ角(または翼角)と呼びます。このピッチ角を付ける仕組みが秀逸(しゅういつ)です。
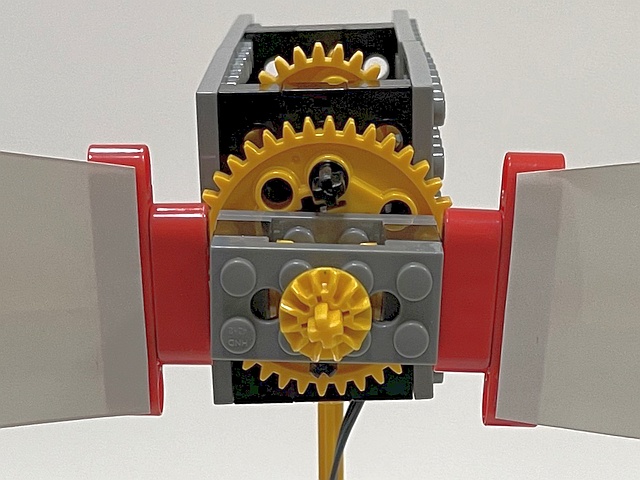
左右のブレードから成るプロペラ一式は、モーターがダイレクトドライブするギアLから回転が伝わりますが、
実際にプロペラに回転力を掛けるのは、ギアLに挿した一対(いっつい)のシャフトペグです。
 このシャフトペグとプロペラ部の間には、少し隙間(すきま)を空けることができます。
このシャフトペグとプロペラ部の間には、少し隙間(すきま)を空けることができます。このようなパーツ同士の“がたつき”のことを“遊び”と呼びます。
今回のプロペラ設計では、この遊びが要(かなめ)なのです。
 テキストp.9の通り、シャフトペグが最も離れる位置(遊びの中央)にあるときに左右のブレードが垂直に揃(そろ)うよう組み立てておけば、
テキストp.9の通り、シャフトペグが最も離れる位置(遊びの中央)にあるときに左右のブレードが垂直に揃(そろ)うよう組み立てておけば、シャフトペグが当たる(遊びを使い果たす)位置関係にあるときは、左右の軸を互いに逆回転させるギアボックス(コの字に組んだマイタギア3枚)の作用により、ブレードに左右対称のピッチ角が付きます。
ここで、もし、ピッチ角が0°(遊びの中央)のまま回転すれば風力を生み出せないことになりますが、大丈夫なのでしょうか?
2つの物理現象により担保(たんぽ)されますので、大丈夫です。
1) 慣性(かんせい)の法則
 乗っている自動車が急加速すると、頭がのけぞってヘッドレストに当たるように、
乗っている自動車が急加速すると、頭がのけぞってヘッドレストに当たるように、物体はスピードを変えるときに慣性抵抗という抵抗力を示します。慣性の法則と呼ばれます。
スイッチONしてギアLの回転を加速させると、プロペラに抵抗力が現れ、なるべく遅れて回るような位置まで遊びを使い果たします。
2) 空気抵抗
 プロペラの回転スピードが上がりきって一定になると、慣性の法則が働かなくなり、シャフトペグをプロペラに押し当てる作用が消えそうです。
プロペラの回転スピードが上がりきって一定になると、慣性の法則が働かなくなり、シャフトペグをプロペラに押し当てる作用が消えそうです。このままでは、ちょっとした振動やモーターの速度変化によってシャフトペグが離れ、ピッチ角が安定しなくなってしまいそうです。
ここでバトンタッチするかのように現れる作用が、空気抵抗です。
ブレードが風力を生むのは、空気を押しのけているからに他ならず、回転を止めようとする抵抗力(作用反作用の法則)を受けますので、やはりシャフトペグをプロペラ部に押し付けてくれます。
ところで、テキストに指示がありませんが、スイッチを入れる向きはどちらでしたか?
逆回転させると、逆向きの風が出そうですよね?
普通のプロペラはそうですが、これは言わば“自動ピッチ切替え機構付きプロペラ”なのです!
逆回転させればピッチ角も逆に傾くので、同じ向き(前方)に風を出します。
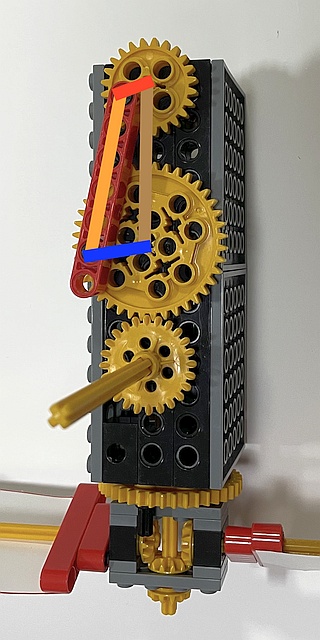
本物の扇風機のように、プロペラ用モーターの回転を減速して(*1)、
首振りの往復運動へ分配する「てこクランク機構」もナイスです(*2)。

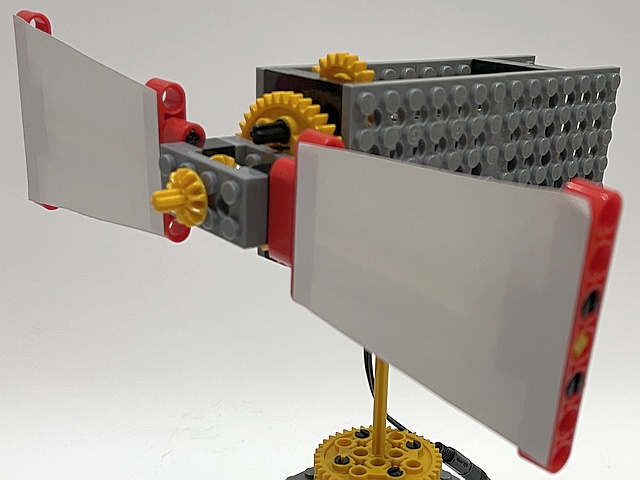
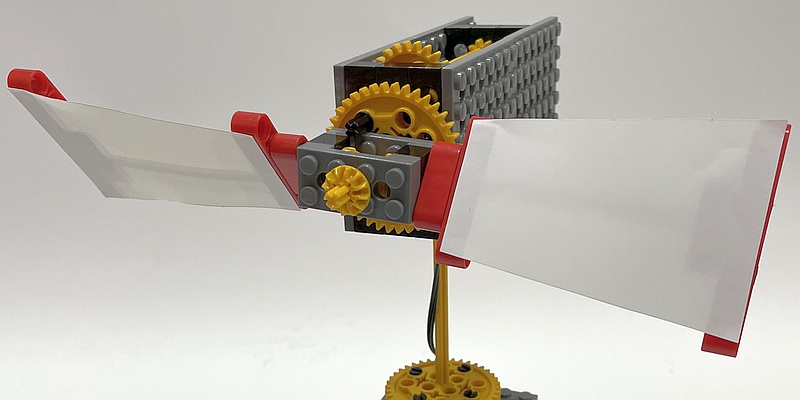
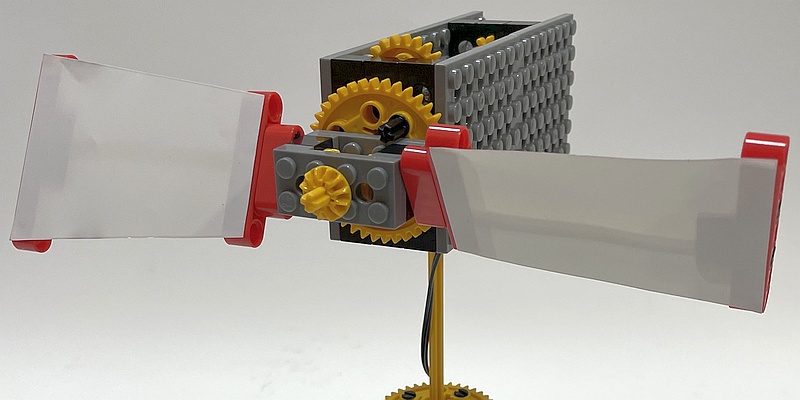
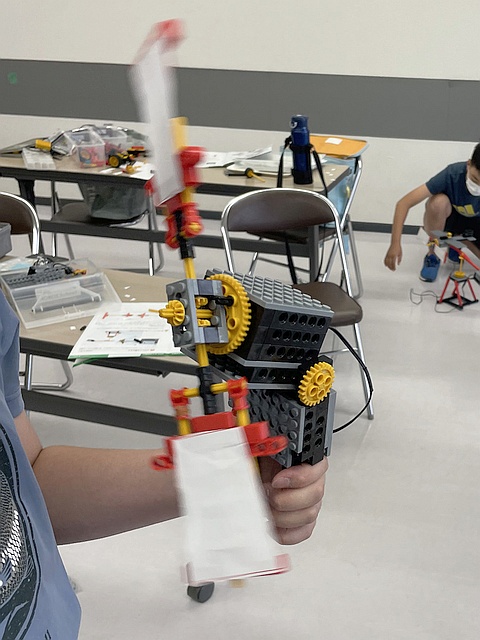
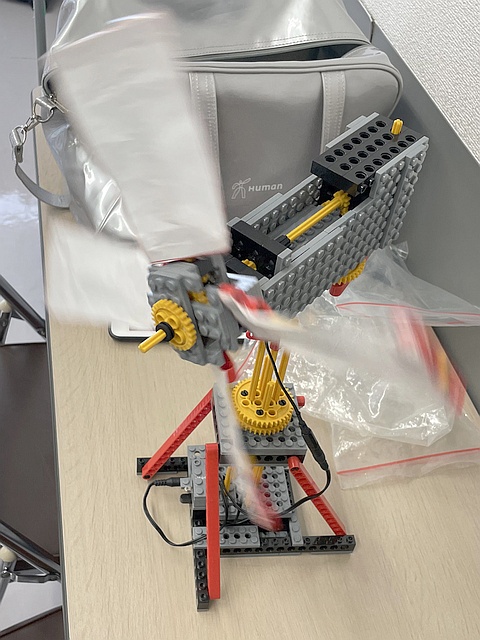
 2日目は、扇風機の土台とプロペラ部材を再利用しつつ、飛行機に改造しました。
2日目は、扇風機の土台とプロペラ部材を再利用しつつ、飛行機に改造しました。同じようなプロペラなのに、プロペラも分解して組み直したのはなぜでしょうか?
そうです、扇風機と飛行機では、プロペラが出す風力の向きが反対であるところ、
“自動ピッチ切替え機構付きプロペラ”のせいで、逆回転させても用を足さないからです(*3)。
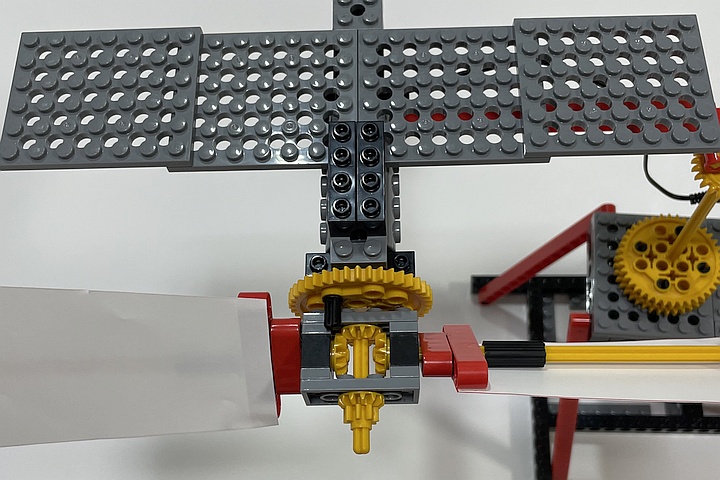
大きな推進力が欲しい飛行機ですから、作り直すついでに、ブレードも長くしたり、大きくしたりしましたね。
プロペラ推進力の足かせにならないよう、旋回(せんかい)中心の摺動(しゅうどう=擦れ合う)部を、ベベルギアの背のリング状凸部や、挟(はさ)んだワッシャーに限定して、少しでも摩擦(まさつ)力を減らそうとする工夫も好きです。



*1 1/3減速ギア(ピニオンギア ⇒ ギアM/ベベルギア)3段により、1/27に減速しています。
家電の扇風機では、高い減速比(1/150程度)が簡単に得られるウォームギア(worm gear)を使用して首振りさせています。
《ウォームギヤ》https://ja.wikipedia.org/wiki/%E3%82%A6%E3%82%A9%E3%83%BC%E3%83%A0%E3%82%AE%E3%83%A4
*2 てこクランク機構は、先月のワニ型ロボット『ロボゲーター』でも下半身をくねらせるのに多く使われました。
*3 逆回転しても風向が変わらない設計を狙(ねら)ったわけではなく、
「パーツを組み合わせてピッチ角を付けた機構上そうなってしまった」と考えられます。
1.5 <アドバンスコース『ロボビート①』割愛>
このドラマーロボットも面白いのですが、テクニカルコンテスト向けマシン優先の為、割愛します。
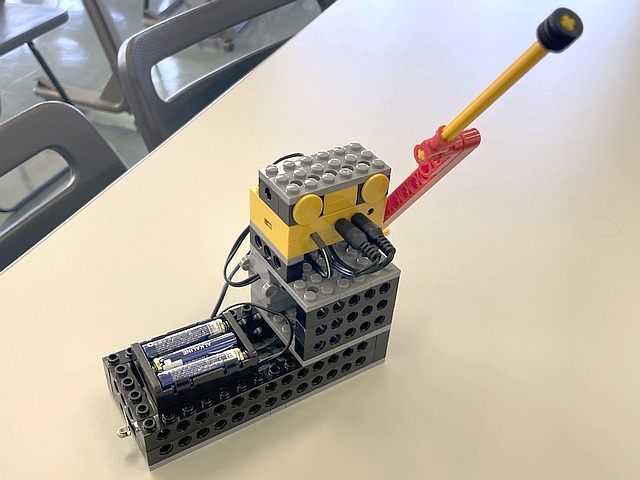

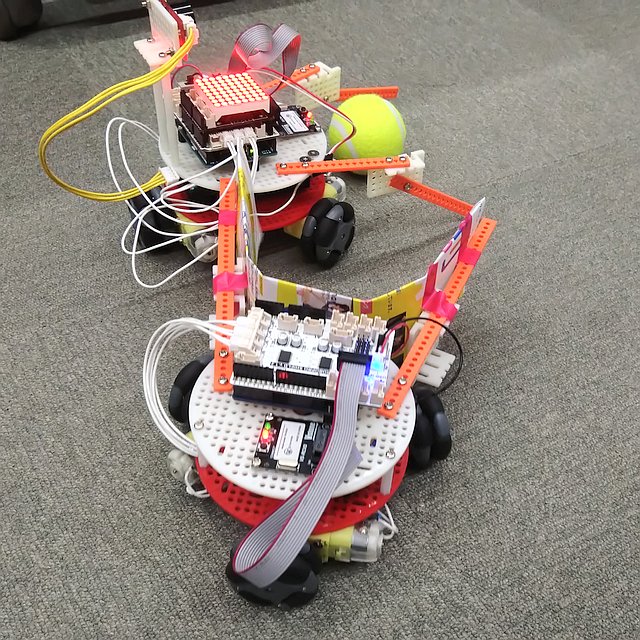
有志の生徒さんで、テクニカルコンテスト(予選)のルールに則ったマシンを試作してみました。
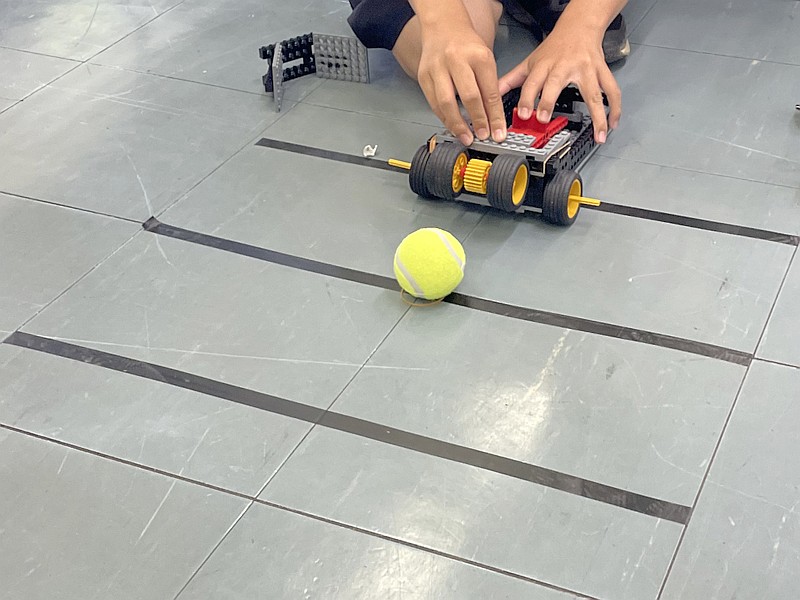
マシンをスタートエリアに置いて起動し、フィールド内に侵入しないよう、PKライン中央に置かれたテニスボールを突きます。
1m先の的(立てた単4電池)を倒すことで得点となります。
使用できるパーツは、ロボットキット(~アドバンス)1セット内のパーツと輪ゴム5本、電池5本までです。
【予選ルール】
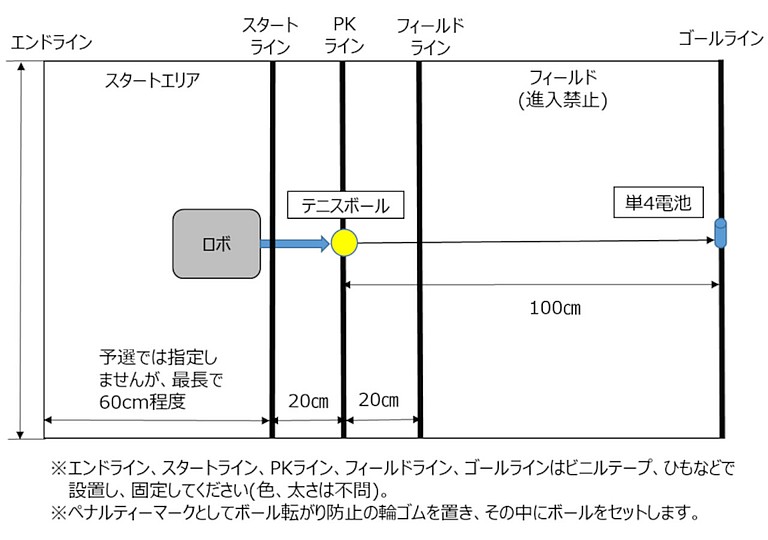
5回連続で試技したうち、的を倒した回数を競いますので、命中率が重要です。
ボールの様々な発射方式が登場する中、果たして命中精度が高いのはどんな方式でしょうか…!?





1.6 <プロ1年目コース『オムニホイールロボット③』>
オムニホイールロボットの3ヶ月目、最終月です。
知的ロボットに必要な「感じて」「考えて」「動く」機能のうち、先月までは「考えて」「動く」だけでした。
いや、「考える」といっても、定めたプログラム通りに動くだけで、せいぜい次の動作に移行する秒数を計っているだけでした。
想像してみてください。いくら“脳ミソ”があっても、外界との接点が無ければ(目も耳も鼻も触覚さえも!)、意識は闇の中…。息が詰まりそうですね。
1日目では、「感じる」触覚を与えます。
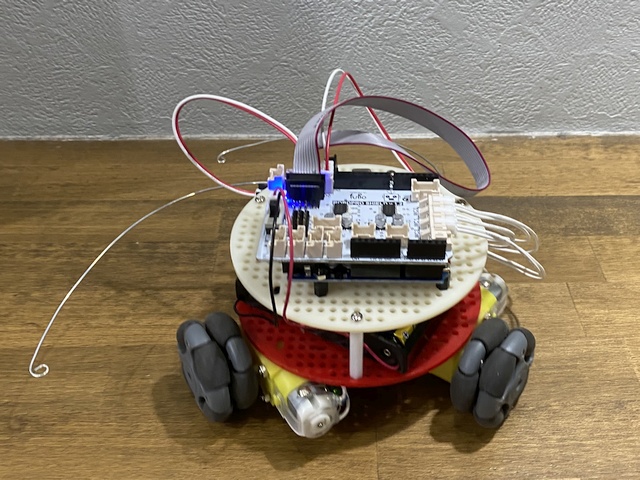 丸い本体の前部(頭部?)に左右のタッチセンサーを取り付け、そこから針金(触角?)を2本伸ばします。まるでテントウムシですね。
丸い本体の前部(頭部?)に左右のタッチセンサーを取り付け、そこから針金(触角?)を2本伸ばします。まるでテントウムシですね。針金に何かが触れると、タッチセンサーがONになって…、どうなる?
それはプログラム次第ですね。そこがマイコン制御方式の良いところです。
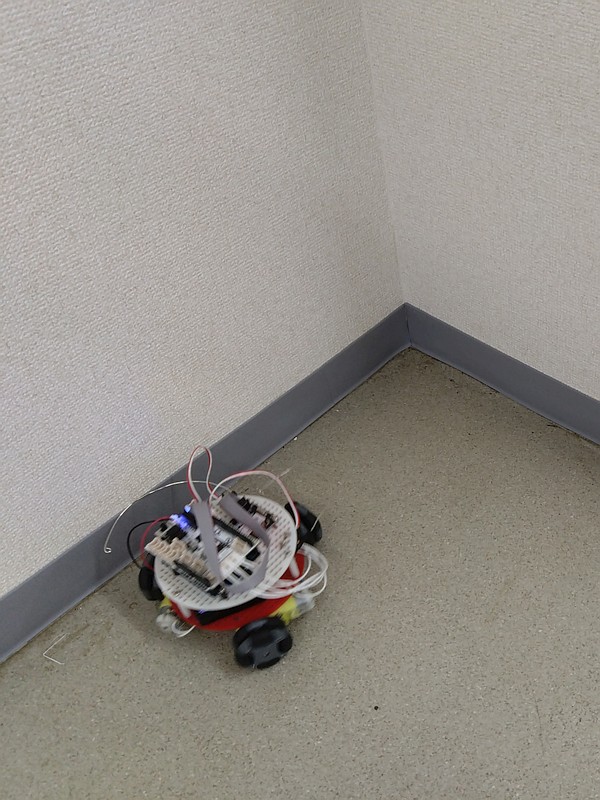
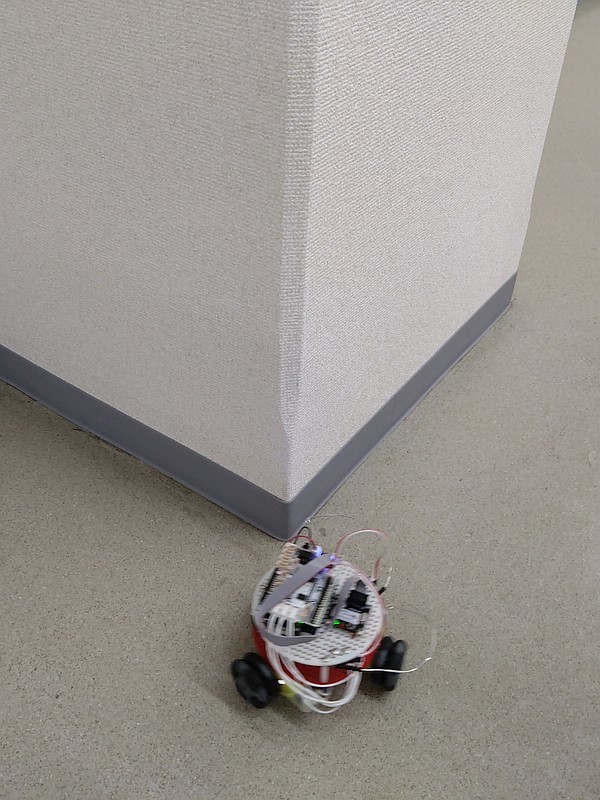
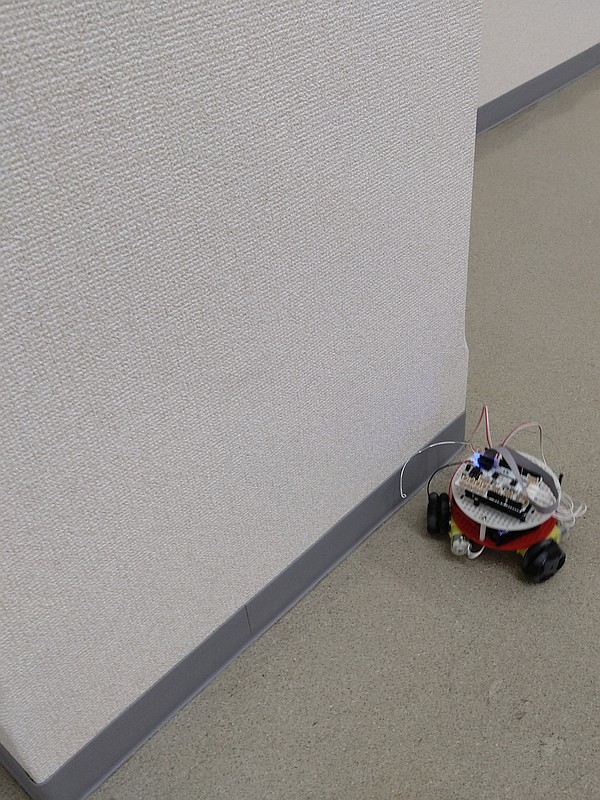
右の触角に触れるとちょっと後ずさり、左の触角に触れると旋回するなど、自由に設計できます。
これだけでも、ロボット掃除機を想わせる動きになります。
どうです?あのスゴイ家電の動作も、こんな感じで実現できてしまうのですよ!
自ら判断して動いてくれるので、生物のような賢さや可愛らしさが出てきます。



これを実現するプログラミング要素を学びました。
“もし、○○だったら△△して、そうでなければ××する”ような判断と行動のルールを与えるもので、“if ○○ { △△ } else { ×× }”の形式で記述します。
条件分岐といって、プログラムには大切な要素です。
これがなければ、ゲームソフトも紙芝居がせいぜいです。
最終日の2日目は、ラジコン操縦プログラムを転送して、「考える」賢さをコントローラ操縦者に委ね、パイロン走行やサッカー対戦などで走らせ回りました。
この過程で、プログラムの条件分岐を使用して、高速走行モードに入るボタンが決められていることを悪用(?)して、パラメータを改造することもできました(*1)。


以上、3ヶ月にわたり、オムニホイールの走行原理やプログラミングの基礎を学びました。
特に、同じボタンやタッチセンサーでも、押されてどう反応するかはプログラム次第であるという点が、マイコン非接続型のスイッチ(受動素子)では出せない特徴です。
次回以降のテーマでも、マイコンに様々な判断と命令を担わせて、面白いマシンを製作して参りましょう。
*1 実際の自動車でも、ECU(Engine Control Unit)チューンと言って、そういうことが(やろうと思えば)できます。
エンジン/モーターの最大パワーは変わらないものの、アクセル操作に対する応答特性を変える走行モード切替が付いている車もあります。
1.7 <プロ2年目コース『不思議アイテムII③』>
外付けの電子回路をプログラミングで操る春タームの3ヶ月目です。
これまでの学習で、ちょっとした電子機器を製作するのに必要な要素技術は揃(そろ)ってきました。あとはアイデア次第です。
世の中の斬新な製品も、殆どは基本機能の組合せであり、その選択や按配(あんばい)こそが“応用(アプリケーション)”として大事なのです(*1)。
 入力デバイスとして、
入力デバイスとして、a) タッチセンサー
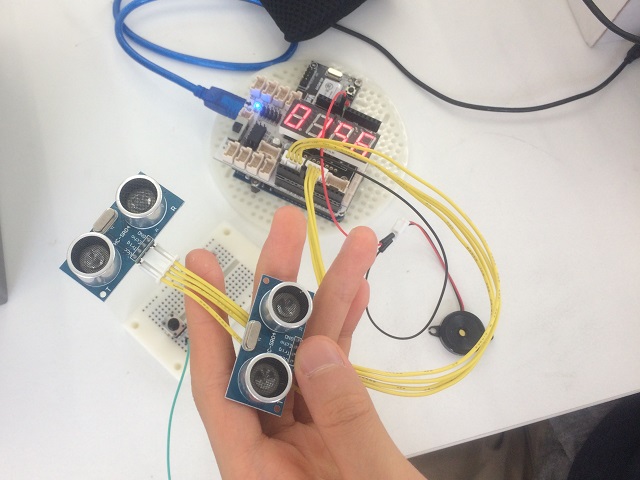
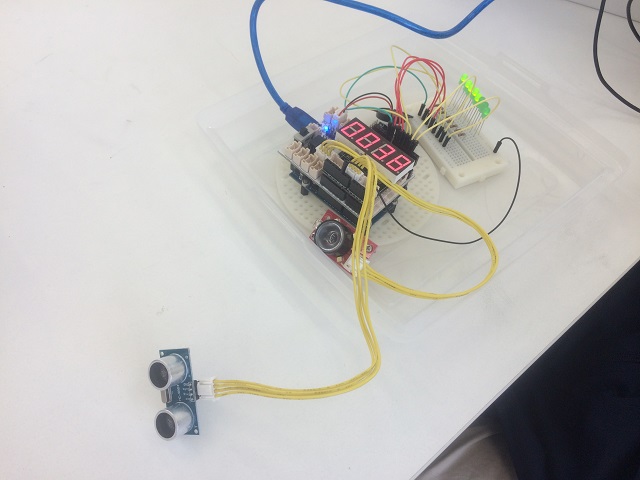
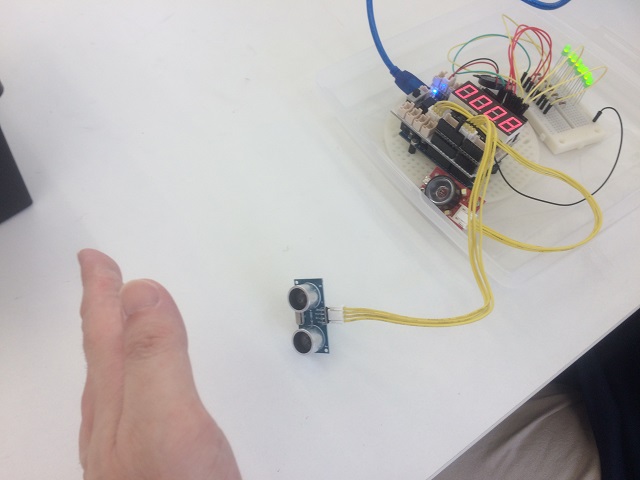
b) 超音波センサー
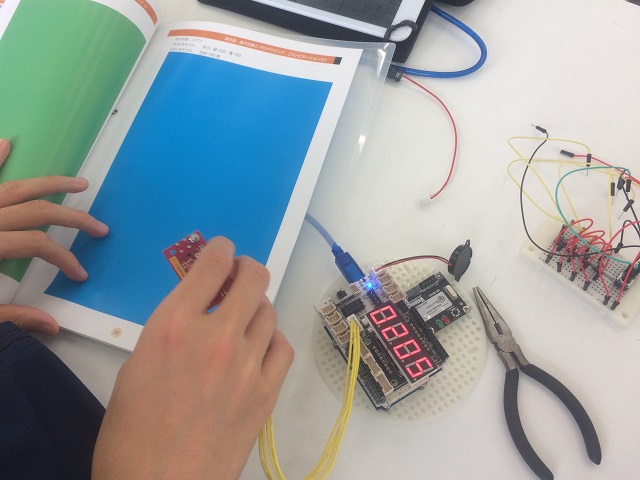
c) カラーセンサー
d) ボリュームセンサー(可変抵抗)
e) CdSセンサー(光依存性可変抵抗)
f) 姿勢センサー
g) タクトスイッチ
h) 無線コントローラー(ゲームパッド)
 出力デバイスとして、
出力デバイスとして、1) モーター
2) スピーカー
3) 単色LED/フルカラーLED
4) 8x8ドットマトリクスLED
5) 7セグメントLED
6) 無線コントローラーのバイブレーター
が登場し、プログラミングで扱ってきました。
これら入力‐出力の組合せに、プログラムの数を掛け合わせた分だけ、アイデアが生まれます。
例えば、今タームだけでも、
a-5) カウンター(野鳥の会・交通量調査で使われる数取器)
b-3) 障害物探知ソナー(距離をLED点灯数で表現)
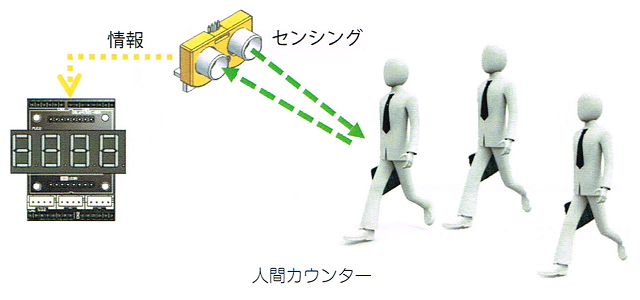
b-5) 来店カウンター(客入りを数える)
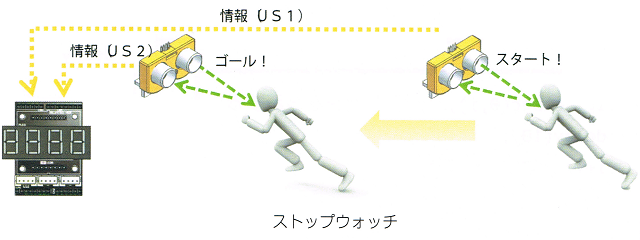
b-5) 自動計測ストップウォッチ
c-2) シンセサイザー?(色を見て音で表現)(*2)
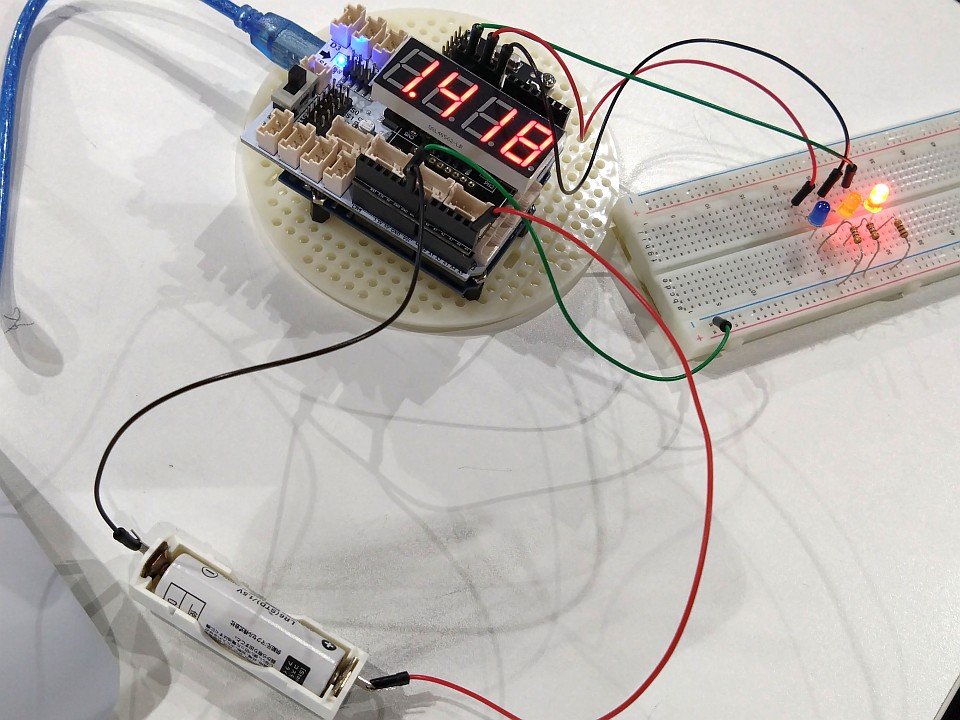
d-3) LED調光器
d-5) デジタル電圧計
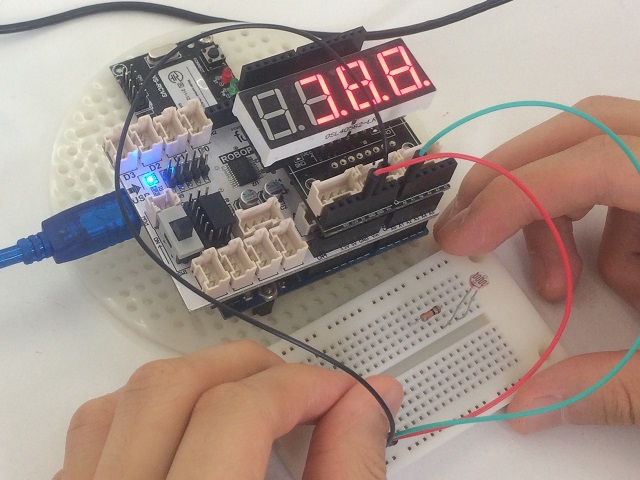
e-2) シンセサイザー(周囲の明るさに応じて音の高さが変わる)
e-3) 照度計(明るさメーター)
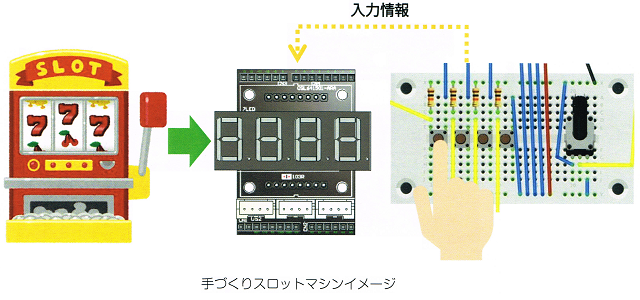
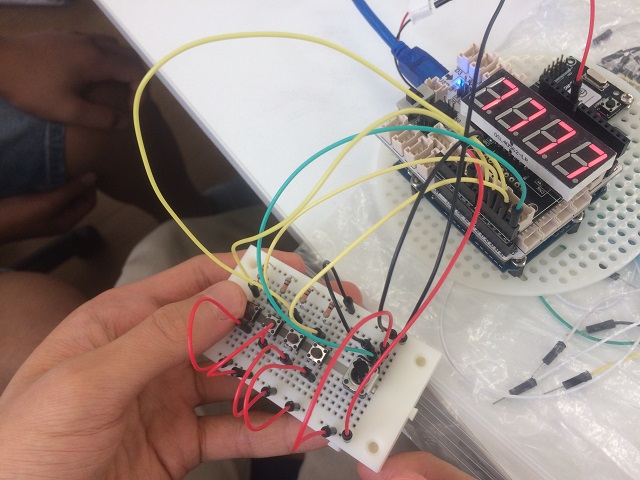
g-5) スロットマシン(ゲーム)
のようなアプリケーションに触れました。
つまり、ボタンを押して決まった光や音を出すだけでなく、数値(デジタル/アナログ)で入力できる情報を1~2行の計算式で変換して、別種の物理量をもった現象として出力できるのです。
 これができるのは、人間がやりたいことを先ず言葉で表現し、手順を論理的に組み立て、プログラミング言語に書き下す能力と環境が揃っているからです。
これができるのは、人間がやりたいことを先ず言葉で表現し、手順を論理的に組み立て、プログラミング言語に書き下す能力と環境が揃っているからです。もちろん、タッチセンサーも、タクトスイッチも、超音波センサー、ボリューム、光センサー、LED、7セグ、スピーカーに、モーターも繋いで高機能なロボットを製作することだってできます。
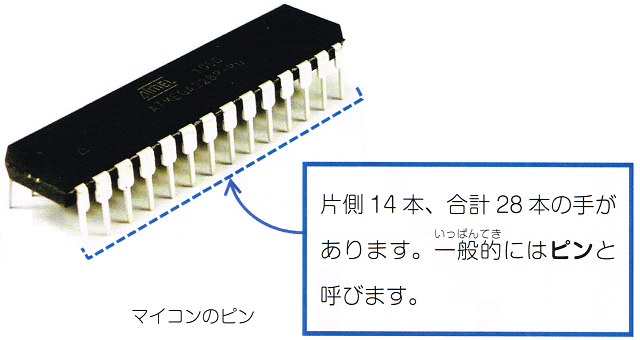 ただ、マイコンの手足(入出力ピン)の数という“物理的限界”がありますし、アナログ入出力が可能なピン数にも限りがありますから(*3)、そのような制約下で如何にうまく機能を実現させるかも、設計の範疇(はんちゅう)です。
ただ、マイコンの手足(入出力ピン)の数という“物理的限界”がありますし、アナログ入出力が可能なピン数にも限りがありますから(*3)、そのような制約下で如何にうまく機能を実現させるかも、設計の範疇(はんちゅう)です。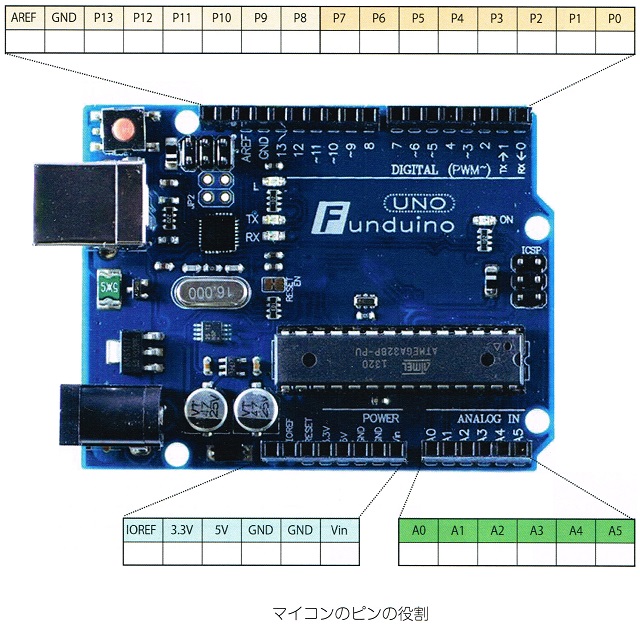 扱うマイコンや開発環境によって違いがありますので、一般的には、仕様書を読み解きながら、必要なデバイスとピン接続を選定し、プログラミングで機能を統合させることもエンジニアの営みです。
扱うマイコンや開発環境によって違いがありますので、一般的には、仕様書を読み解きながら、必要なデバイスとピン接続を選定し、プログラミングで機能を統合させることもエンジニアの営みです。とても総合力が強化される(頭が良くなる)場面ですので、自らの設計で、電子機器やロボットの製作を早めに経験して、趣味にして欲しいと思います(*4)。
 ここで、カウンター(計数)プログラムのテクニックをおさらいしておきます。
ここで、カウンター(計数)プログラムのテクニックをおさらいしておきます。b-5) 来店カウンターにおいて、高速に繰り返すループ関数(メインルーチン)の中で「検出した距離が短かったら、カウントアップ」という論理だけをコーディングすると、客がセンサーの近くにいる間めまぐるしくカウントアップしてしまいます。
「短い距離を検出してカウントアップしたら、長い距離を検出するまで何もしないで待つ」ことで、一人ずつ数えられるようになりますね。
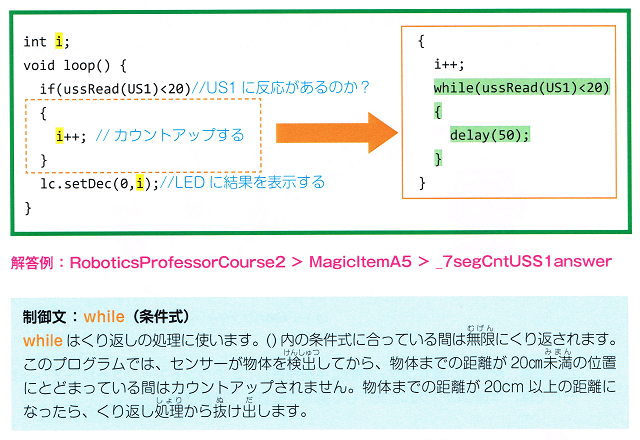 そのために、while文を使います。
そのために、while文を使います。while文は、繰返し機能をもったif文のごとく、条件式が成立する間だけ中身を繰り返します。
繰返し命令文にはfor文もありましたが、for文は、決まった回数だけ繰り返す使い方が主であるのに対し、while文は、繰返し回数が不定であるような条件下でよく使われます(*5)。
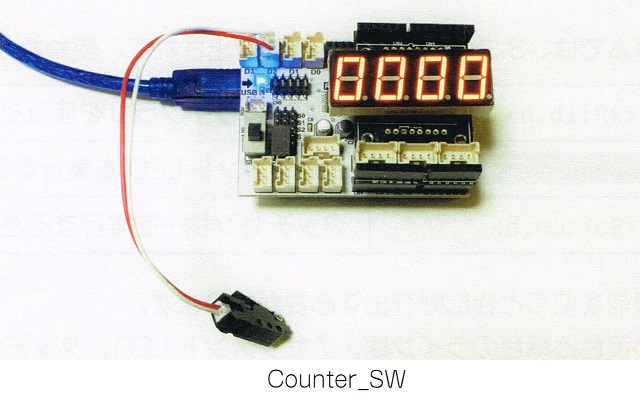 なお、a-5) 手押しカウンターの場合も、loop(){ } の中で、
なお、a-5) 手押しカウンターの場合も、loop(){ } の中で、if( digitalRead(D2) == HIGH ) { // D2接続スイッチが押されたら
count++; // カウントアップ
}
と書くと、スイッチを押している間中カウントアップしてしまいますが、
#include <Button.h> // スイッチ(Button)ライブラリ読込み
Button SW = Button(D2, HIGH); // D2接続スイッチにSWと命名するおまじない
SW.listen(); // 押下状態を問合せ
if( SW.onPress() ) { // もし押されてたら
count++; // カウントアップ
}
のように onPress() を使えば、一度スイッチを離さないと次のカウントアップがされなくなりますので、便利です(*6)。
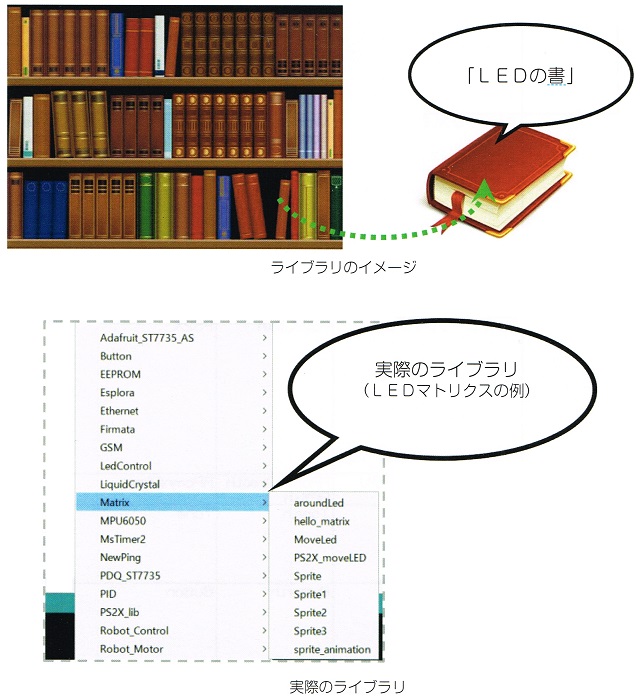 このような誰かが用意してくれた便利な関数は、“ライブラリ”という仕組みから呼び出し、準備するためのおまじないを唱えて、大いに利用させてもらいましょう。
このような誰かが用意してくれた便利な関数は、“ライブラリ”という仕組みから呼び出し、準備するためのおまじないを唱えて、大いに利用させてもらいましょう。次月からの夏タームは、お待ちかね、サーボモーター式アームロボットの製作です。
*1 電化製品のことを英語で electrical appliances(電気的な応用物)というくらいです。
*2 色相(色味情報)だけを抽出し、色相環でいう角度 0~359°を音の周波数として再生しました。
*3 アナログ入力にはA/D変換器、アナログ出力にはPWM波形生成器という特別な内部回路が必要ですので、全てのピンに機能を持たせることはしません。
*4 仕事や趣味で電子機器やロボットを扱うと、理科(電子回路)、数学、国語・英語(仕様書・説明書)、プログラミング的思考力などが複合して問われます。
そして、技術の日進月歩により、自然に毎日が勉強です。楽しくなりますよ!
*5 while(条件式) は for( ; 条件式; ) と等価ですので、for文の方が高機能であり、while文+α(初期化+後処理) の機能をもちます。
*6 代わりに isPressed() を使えば、digitalRead(D2)==HIGH と同じように、スイッチを押している間中カウントアップすることもできます。
1.8 <プロ3年目コース『不思議アイテムIII-1③』>
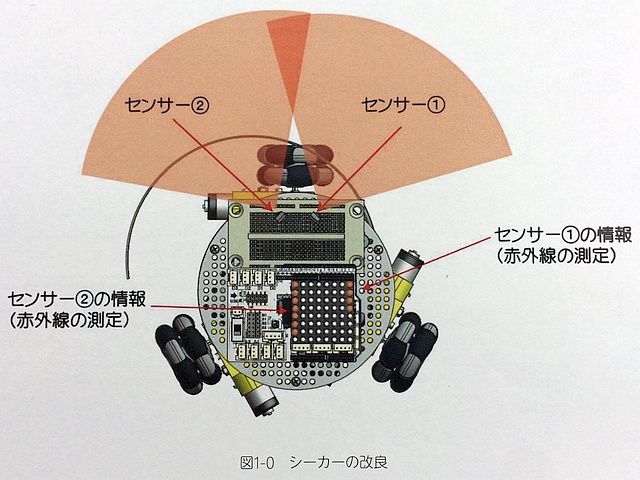 第5回の内容では、赤外線追従ロボットへ改造しました。
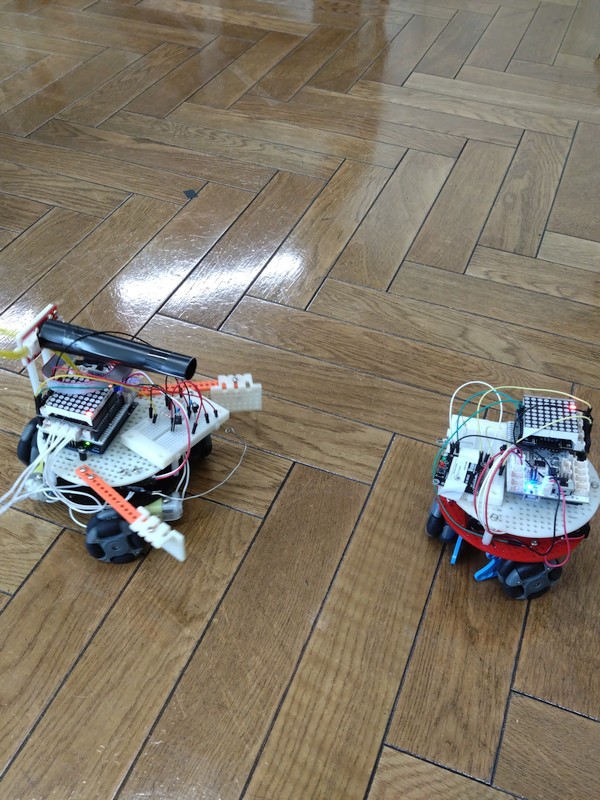
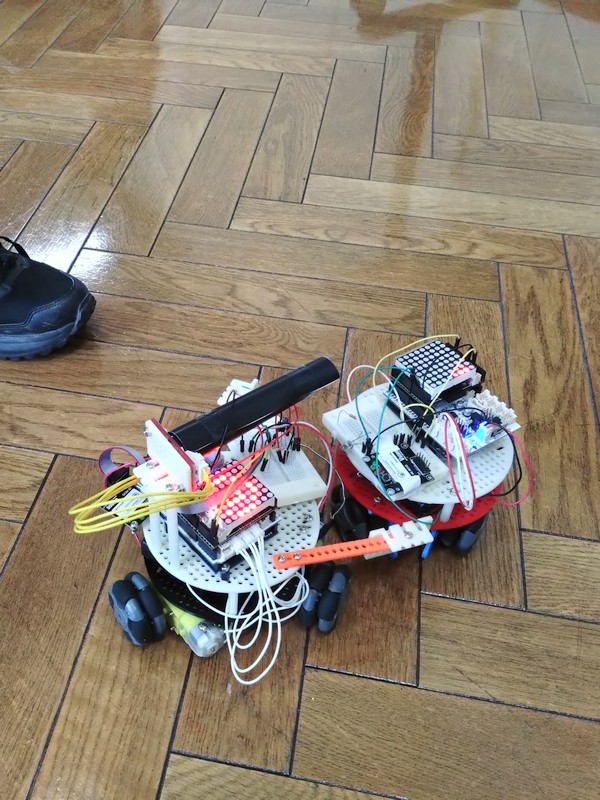
第5回の内容では、赤外線追従ロボットへ改造しました。姿勢センサーは外しましたが、赤外線受光素子を左右斜め前方に2個取り付け、その受光レベルの強弱で(*1)、ボール代わりの赤外線ビーコンマシン(モーター無し空回りオムニホイールベース)に向かって走ります。
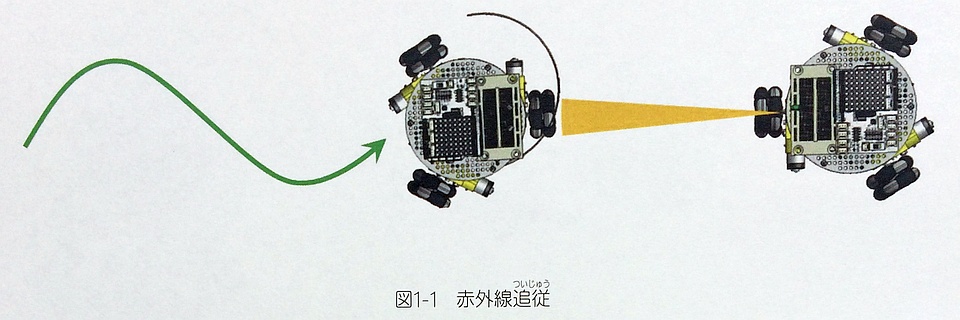 ボールマシンに接触したしたことを前部に取り付けたタッチセンサー(+針金)で検知して、一旦止まります。
ボールマシンに接触したしたことを前部に取り付けたタッチセンサー(+針金)で検知して、一旦止まります。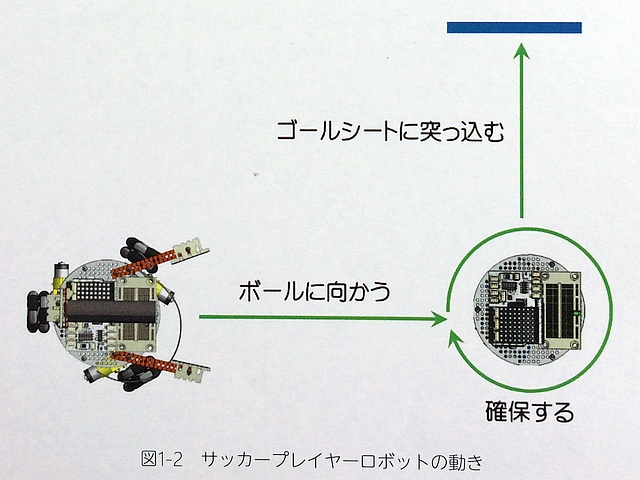 さらに第6回の内容で、サッカー(1人プレイヤー)ロボットへ発展させました。
さらに第6回の内容で、サッカー(1人プレイヤー)ロボットへ発展させました。両アームの間にボールマシン(赤外線ビーコン)を抱えたまま、カラーセンサー(+覗き円筒)でゴール代わりの青い紙面を見つけるまで旋回し、ドリブルシュートするプレイです。
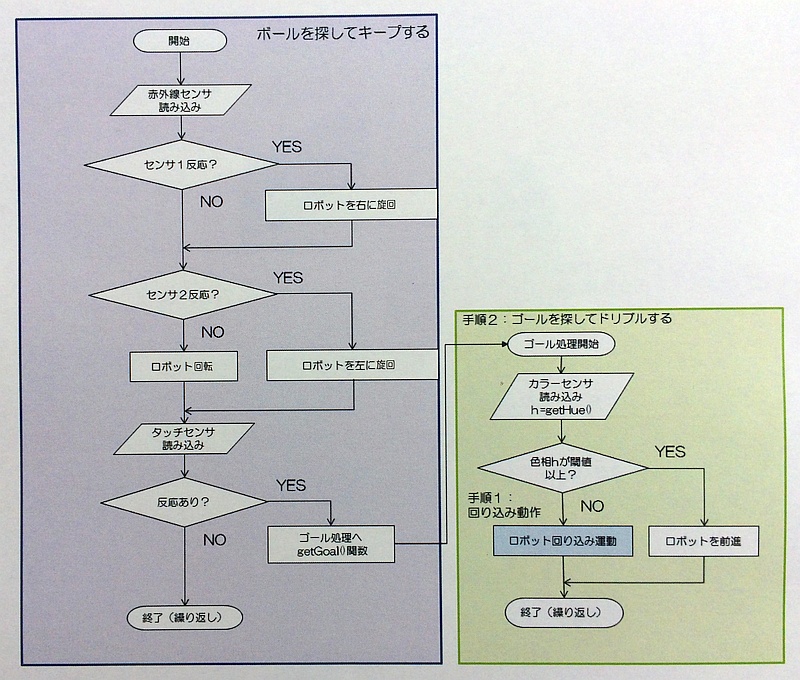 高度な制御に見えますが、赤外線やカラーセンサーの機能(デバイス+ライブラリ)を利用した恩恵が大きいのであって、フローチャートやプログラム[RobotSoccer]を見ても理解し易いように、さほど複雑なアルゴリズムではありません。
高度な制御に見えますが、赤外線やカラーセンサーの機能(デバイス+ライブラリ)を利用した恩恵が大きいのであって、フローチャートやプログラム[RobotSoccer]を見ても理解し易いように、さほど複雑なアルゴリズムではありません。プログラムの難しさは、意外な所にあったりします。
授業の最後に、サッカー個人プレイ(1人ドリブルシュート)の性能を試します。
室内の照明の具合にもよりますが、周囲の景色に誤反応しにくいよう付けた覗き円筒が仇(あだ)となり、
ボール(赤外線ビーコンマシン)を抱えたままゴール探索のために旋回中、遠方にゴール(青い紙面)を認識して一瞬止まろうとするも、回転の慣性で通過してしまうことが殆どでした(*2)。
●覗き円筒を短めにカット
●ゴール近くからプレイ開始
することにより、3種のセンサー(赤外線⇒タッチ⇒カラー)を駆使したインテリジェントロボットを堪能することができました。
そのスマートな動作たるや、思わず顔がにんまりしてしまうほどです。
*1 強弱の2値(1ビット)だとしても、左右で2ビット4通りの情報が得られますから、左曲がり・右曲がり・直進・旋回(ビーコン探索)のような動作へ割り振れます。
*2 青を一瞬でも認識したら、ゆっくり逆旋回しながら「じっくり探し直す」ようなプログラム上の工夫も考えられます。
2. 6月の課題
<スタートアップ(全コース)>
特にありません
<プレプライマリーコース> (プライマリーではありません)
- オリジナル図形プリント
https://robocobo.sakura.ne.jp/blog/HW/RobotPP2506-Q.pdf
<プライマリーコース> (難しければプレプライマリー↑でもOK)
- オリジナル図形プリント
https://robocobo.sakura.ne.jp/blog/HW/RobotP2506-Q.pdf
<ベーシックコース>
- 授業まとめを精読する(概ね3年生以上/低学年は補助の下で)
- オリジナル課題プリント(3面図+設問)
https://robocobo.sakura.ne.jp/blog/HW/RobotB2506-Q.pdf
<ミドルコース>
- 授業まとめを精読する
- オリジナル課題プリント(3面図+設問)
https://robocobo.sakura.ne.jp/blog/HW/RobotM2506-Q.pdf
<アドバンスコース>
⇒テクニカルコンテスト向けマシン優先の為、割愛します
<プロ1年目コース>
- 授業まとめを精読する(該当テキストページを見ながら)
<プロ2年目コース>
- 授業まとめを精読する(該当テキストページを見ながら)
≪下記いずれか(後者ほどハイレベル)≫
- プログラム[USS_8LED]をベースに、接近するほどLEDが多く点灯し、警告音がけたたましくなる障害物検知アラームをプログラミングする
(3種以上の警告音を自分でデザインし、鳴らし分けること)
- スロットマシン[_7segSlot5]をベースに、機能や効果音の演出を増やし、完成度を上げる
《例》
“777”以外のゾロ目でも当たり音を出す
“77*”等でリーチ音を出す
停止ボタン押下後、数字遷移が段々遅くなるように止まる【ハイレベル】
- スポーツタイマー[_7segCntUSS2_4]または1年目1月泥棒アラーム[USSApp1]をベースに、入退室判定(鳴り分け)チャイムに改造する
《ヒント》
US1→US2の順に検知したのか、US2→US1の順に検知したのかを判定する為に、
適当なフラグ変数を宣言 int flag; し、以前に検知した番号を記憶しておく。
検知順に応じてメロディを変える。(メロディ演奏方法は[_7segSlot5]または[ToneTest]を参考)
チャイムを鳴らした後はクリア flag=0; しておく。
<プロ3年目コース>
- 授業まとめを精読する(該当テキストページを見ながら)
3. 5月の解答
<プレプライマリーコース>
https://robocobo.sakura.ne.jp/blog/HW/RobotPP2505-A.pdf
<プライマリーコース>
https://robocobo.sakura.ne.jp/blog/HW/RobotP2505-A.pdf
<ベーシックコース>
https://robocobo.sakura.ne.jp/blog/HW/RobotB2505-A.pdf
<ミドルコース>
https://robocobo.sakura.ne.jp/blog/HW/RobotM2505-A.pdf
<アドバンスコース>
https://robocobo.sakura.ne.jp/blog/HW/RobotA2504-A.pdf
4. 7月の授業予告
https://robocobo.sakura.ne.jp/blog/hap/robo-2507.pdf<プレプライマリーコース>『オハナッチ』
<プライマリーコース>『ウッシーくん』
<ベーシックコース>『ロボケラトプス』
<ミドルコース> 『シュート君』
<アドバンスコース>『ロボビート②』
<プロ1年目コース>『不思議アイテムI-1①』
<プロ2年目コース>『アームロボット①』
<プロ3年目コース>『六脚ロボット①』
5. 今後の授業スケジュール
◆八幡東7/19は創フェスの為、7/26へシフトします
――――――――――<佐藤教室長>――――――――――
[東福間]第1・3土原則<学習ルームでこぼこ>
- 13:30~ ベーシック/ミドル
- 15:30~ アドバンス
⇒ 7/5, 19, 8/2, 16, 9/6, 20
[東福間プロ]第2・4日原則<学習ルームでこぼこ>
- 10:00~ プロ1年目
- 13:00~ プロ2年目
- 16:00~ プロ3年目
⇒ 7/13, 27, 8/10, 24, 9/14, 28
[サンリブ古賀]第2・4土原則<文化サークル>
- 10:30~ ベーシック/ミドル/アドバンス
⇒ 7/12, 26, 8/9, 23, 9/13, 27
[小倉北]第1・3日原則<ムーブ>
- 10:30~ ベーシック/プライマリ
- 13:00~ ミドル
- 15:00~ アドバンス
- 15:00~ プロ3年目
⇒7/ 6 第1回 4F和室
7/20 第2回 5F企画ルーム1
8/3, 17, 9/7, 21
――――――――――<中野教室長>――――――――――
[八幡東]第1・3土原則<レインボープラザ4F>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドバンス
⇒ 7/5, 26※, 8/2, 16, 9/6, 20
※7/19創フェスの為、7/26へシフトします
[小倉南]第2・4日原則<総合農事センター2F>
- 10:30~ ベーシック/プライマリ
- 13:00~ ミドル
- 15:00~ アドバンス
⇒ 7/13, 27, 8/10, 24, 9/14, 28
【振替教室ご利用条件(ロボプロを除く)】――――――――
振替先の1週間前までにメール下さい(許可制)
振替手数料550円/回をご負担下さい(お引落し)
(東福間⇔小倉北のみ無料)
所定コース内容・時間のみお受けします
6. お知らせ
1) 5月課題 高得点者 []内は教室と学年
◆プレプライマリ
5点…土屋[小倉北1], 高崎[小倉南 年長]
◆プライマリ
5点…藤原[八幡東2]
◆ベーシック【13名平均 図面3.0+設問1.6=4.6】
10点…なし
9点…なし
8点…菅原[小倉南5]
7点…なし
6点…福田[八幡東4]
◆ミドル【11名平均 図面3.2+設問1.5=4.7】
10点…なし
9点…なし
8点…亀平[八幡東4]
7点…井上[小倉南5]
6点…荒川[小倉北5]
◆アドバンス
高得点なし
東福間・小倉北・サンリブ古賀教室 佐藤 / 八幡東・小倉南教室 中野