2.今月の課題
3.今後の授業スケジュール
4.お知らせ
1. 11月授業内容
1.0 <スタートアップ(全コース)>
割愛します。
1.1 <プライマリーコース『ロボコング』>
割愛します。
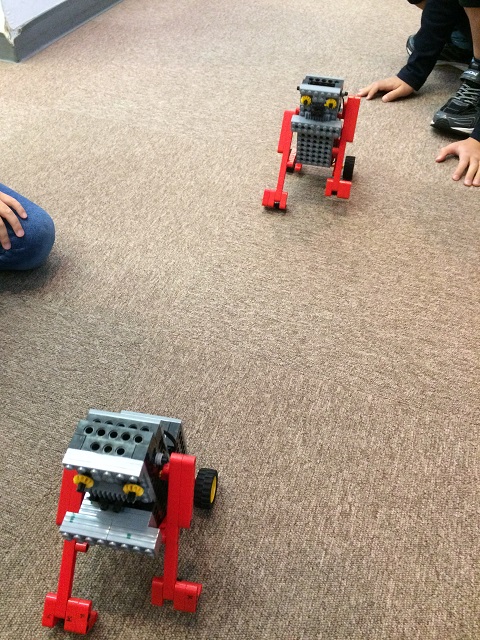
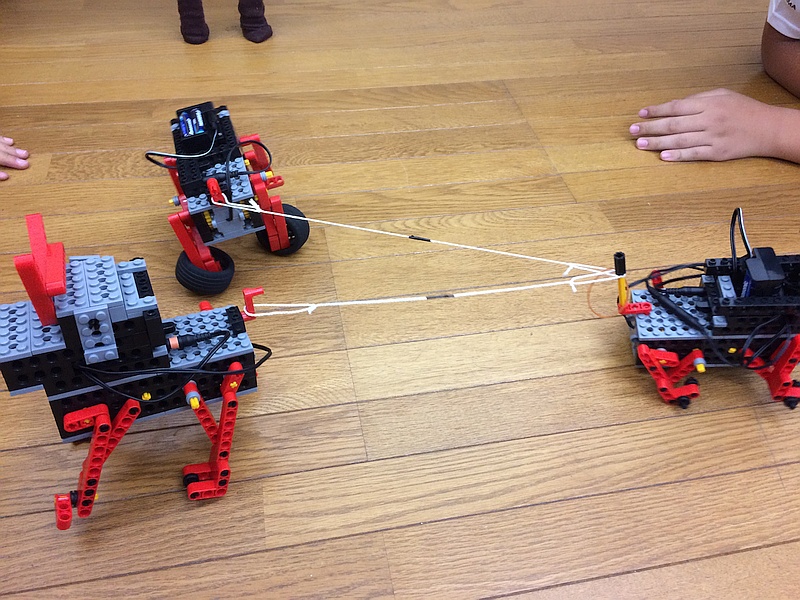
1.2 <ベーシックコース『パカラー』>

馬型ロボットです。
中には、首を長くしてキリンや、角を付けてトナカイになったものや、首なし“妖怪”もありましたが。
横から見て、前脚(まえあし)と後ろ脚(うしろあし)がハの字に開いたり閉じたりを繰(く)り返します。
左右ではタイミングを反対(位相を180°ずらし)にしています。
単純に見えるリンク機構から、モーター1本で動物らしく4足歩行することに驚(おどろ)かされます。
特に、前足(タイヤ)は、横から見て円形を描(えが)くように動くことで、左右どちらか一方が接地(せっち)し、他方は浮(う)き上がることが可能になり、真の歩行動作と推進力(すいしんりょく)を生み出しています。
後ろの2足(ホイール)は常(つね)に接地したまま前後運動(見せかけの歩行)をするので、摩擦(まさつ)が邪魔(じゃま)にならないようゴムを外していますが、
前の1足と合わせた3点支持(しじ)により、本体を安定させる役割も担(にな)っています。

あとは、首を飾(かざ)り付けすぎたり、重たい電池ボックスを前方に片寄(かたよ)らせたりして前のめりにならないよう、重心(重さの中心位置)に気を配ります。
もしくは、リヤカー(サンタのソリ?)を引くことでも安定しましたね。


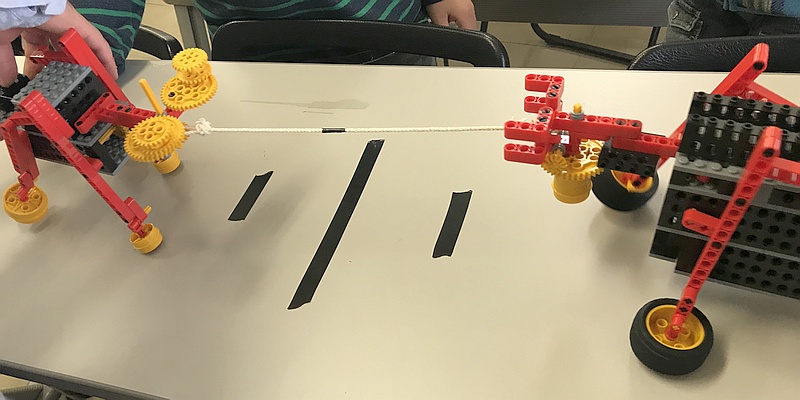
授業の最後に、対戦ペアのパカラーのお尻(しり)を紐(ひも)でつないで、綱(つな)引きをしましたが、下記のようなロボットは弱かったようです。
1) 電池が弱い(*1)
2) ベベルギアが滑(すべ)ってガリガリ言うだけで、進まない(*2)
3) 綱でお尻の高い所を引っぱられて前足が浮き、地面をうまく蹴(け)られない(*3)
4) 左右の脚を動かすタイミングが真反対(まはんたい)になっておらず、推進力が弱かったり、バランスが悪く倒れやすかったりした(*4)
5) グリップ力を高めようと重くしすぎたり、引きずる後ろ足にまでタイヤゴムをはめたりして、自身で動けなくなり、判定負けした(*5)
*1 引っぱれないどころか、動けなければ判定負けですので、勝ち目がありません。
*2 モーター側のピニオンギアとベベルギアがしっかり噛(か)み合うよう、ワッシャーを3枚入れています。
ベベルギアが削(けず)れてしまったら、ワッシャーを4枚にしたり、ブッシュやグロメットに替(か)えたり、自分で改良します。
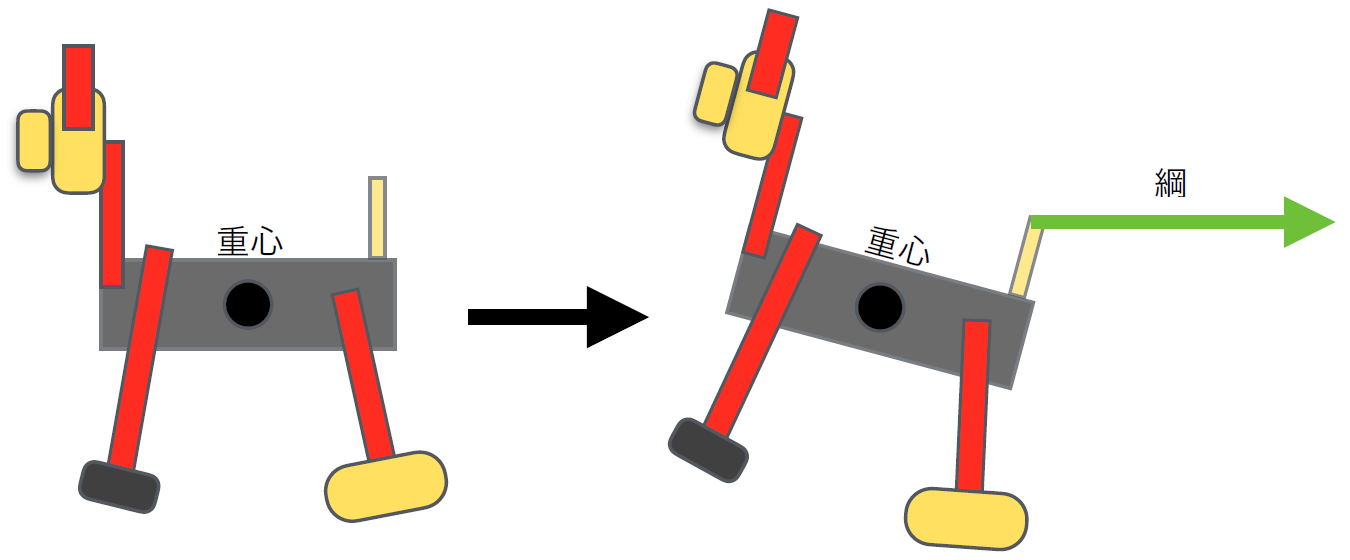
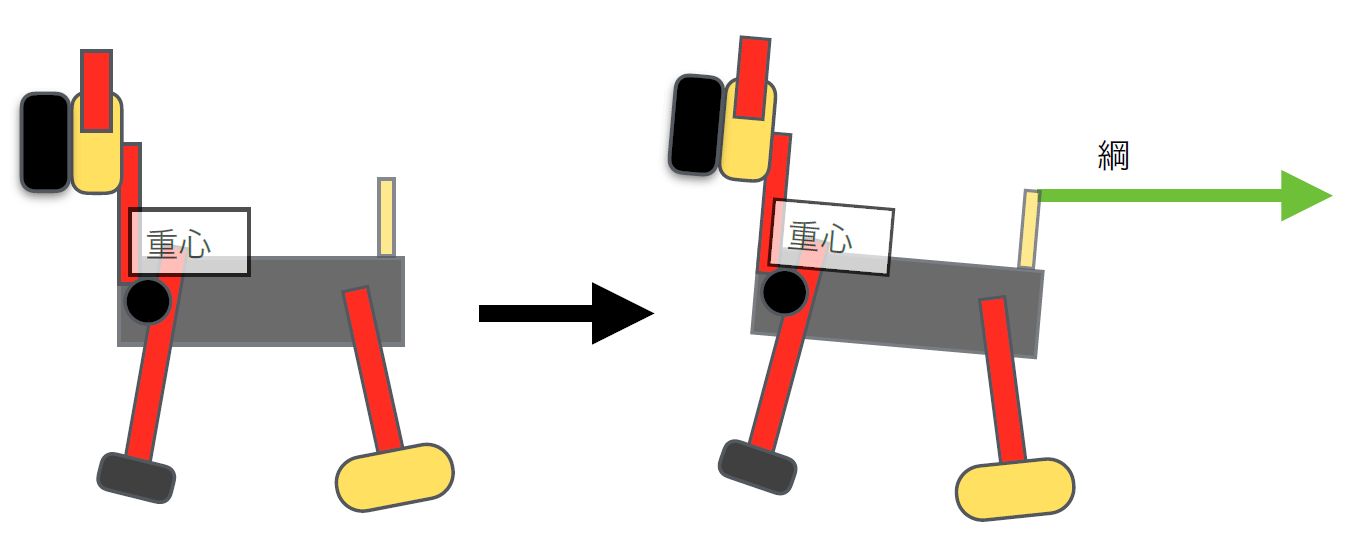

*3 後ろ足を支点(してん)にして、パカラーを後ろに回転させようとする力が働(はたら)くためです。
綱をなるべく低い所に結び、さらに、頭のパーツを重くして、重心を前方に移動させます。
運動会の綱引きで、上体を引きたい方向(後ろ)へ傾(かたむ)けるのも、つっぱった前足を支点にして体が前へ回転しないよう、重心を後ろにもっていくためです。
*4 胴体(どうたい)側面(そくめん)のロッド3アナの向きを180°ずらします。
90°ずれの人が多かったです。そうすると、「パカ、パカ、パカ…」という等(ひと)しいリズムにならず、「パカパカッ、パカパカッ…」となってしまいます。
*5 実は、ギアで減速すると止まらず、最強の改造になりますが、ミドルコースレベルです。
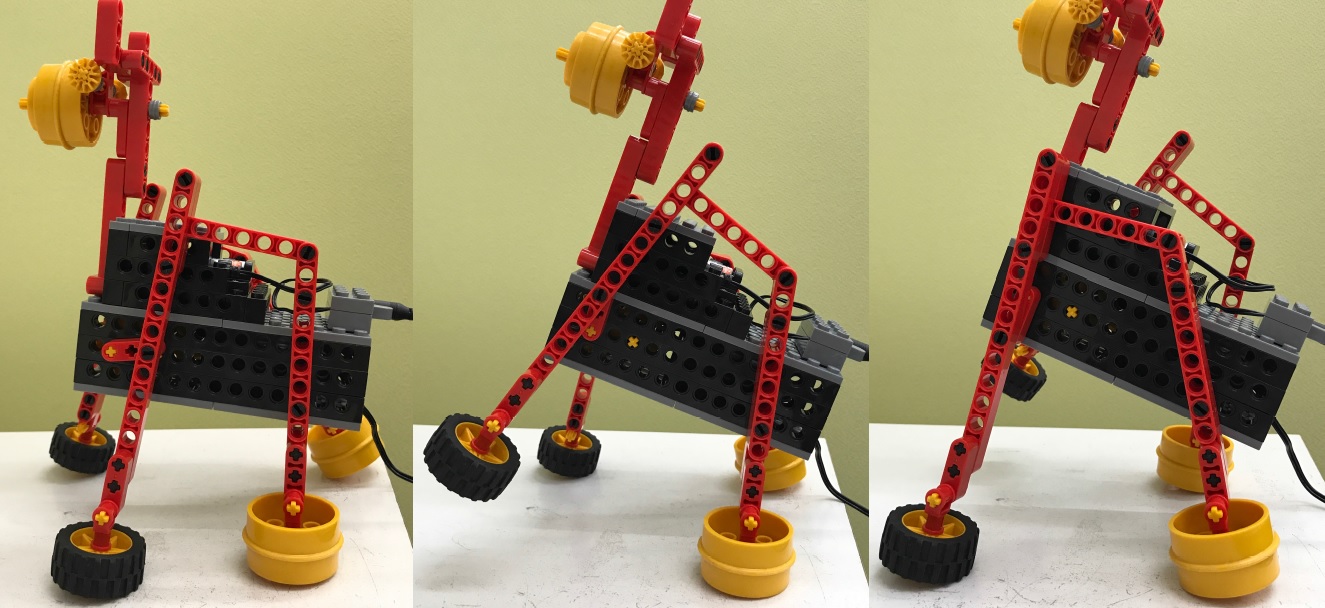
1.3 <ミドルコース『ロボワン』>
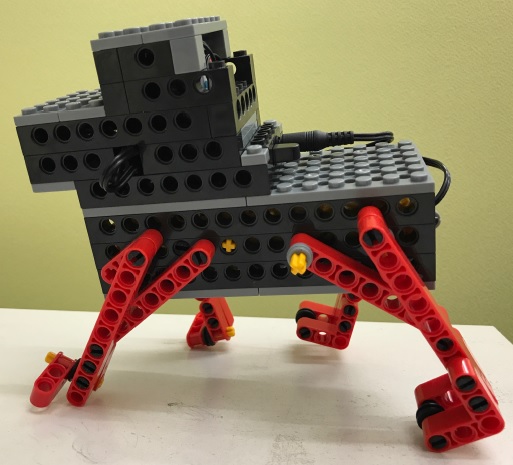
忠犬ロボットと銘打(めいう)っています。
今月はベーシックコース共に、4足歩行動物になりました。
回転するロッド3アナ(クランク用)と連接用ロッドをペグ(回転軸)でつないだリンク機構(てこクランク機構)により、
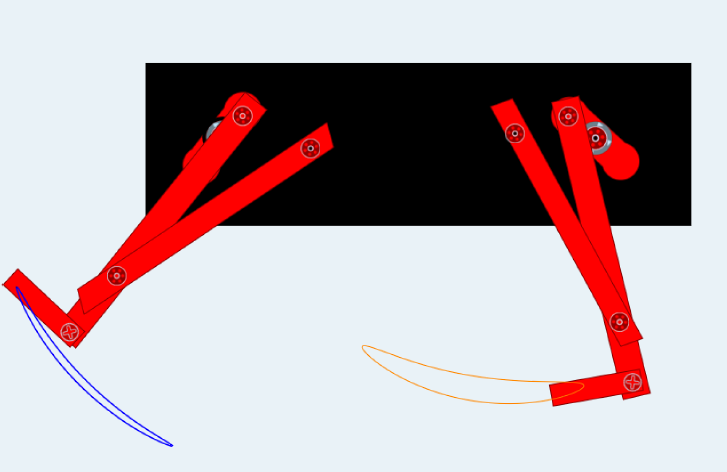
モーター1本で4足がタイミング(位相)をずらして前後(実際は細い三日月形)運動をします。
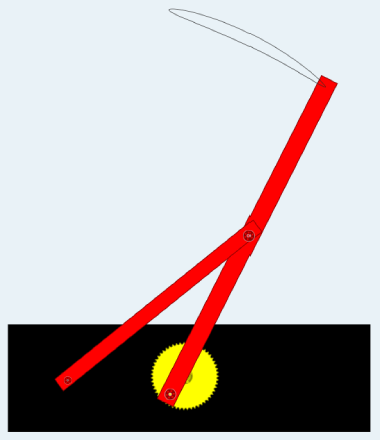
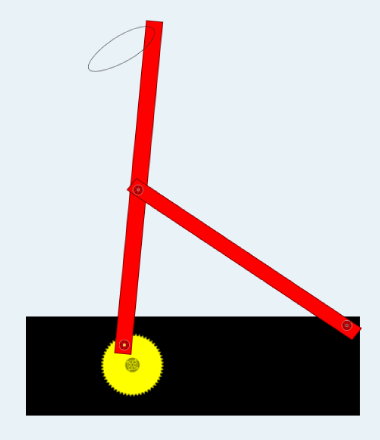
また、このリンクの組み方次第で、ロッド末端部(足先に相当)に輪ゴム留(ど)めした鉛筆の軌跡(きせき)が細長い三日月や楕円(だえん)に変わることも実験しました。
機械工学的な理論としては難しいので、テキストでも解説はありませんが、
てこクランク機構というのは、組み方を少し変えるだけで軌跡が大きく変わるので、いろいろ試して歩き方の変化を楽しんでみましょう(*1)。
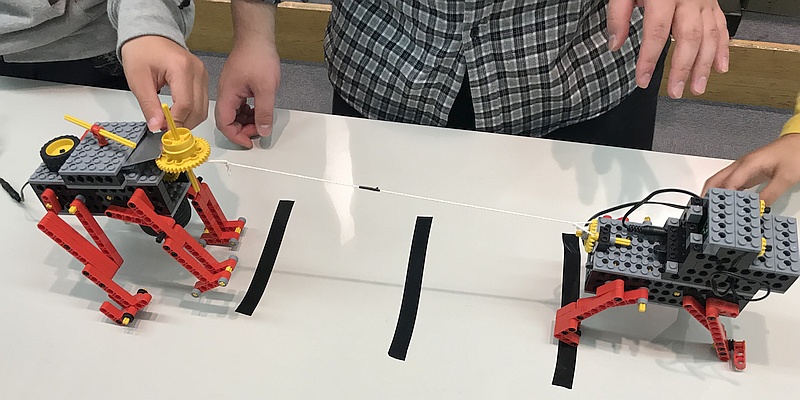
授業最後の競技は、ベーシックコース『パカラー』同様、綱引き!
下記のようなロボットが強かったようです。
1) 電池がパワフル
言うまでもありませんね。前提条件です。
2) ピニオンギアとベベルギアをしっかり噛(か)み合わせている
ギアが滑(すべ)って「ガルルルッ…」と吠(ほ)えるだけの負け犬が多かったです。
テキスト通りに作ってダメなら、自分で調整するように(*2)。
3) 4脚をバランス良くずらして動かす
脚は付ければいいってものではありません。胴体側面のロッド3アナの向きとシャフトペグの位置をテキスト通りに合わせます。
前脚も後ろ脚も、左右でタイミングを反対(位相を180°ずらし)にするのが基本です。
前後では、90°ずらしています(*3)。
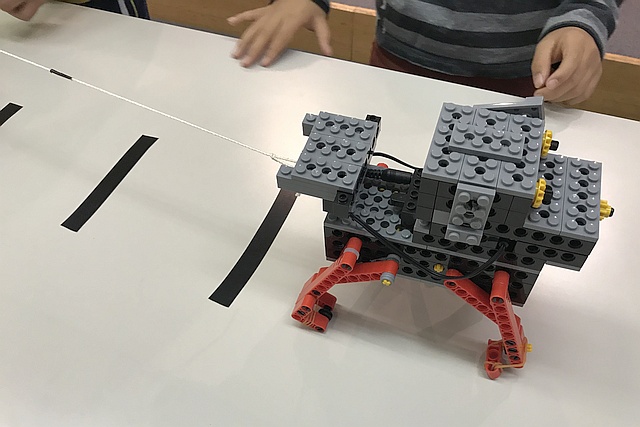
4) 脚が短い!
ダックスフント型の改造例がテキストに載っています。スピードレースには不利ですが、綱引きにはとても有利です(*4)。
同じモーターパワーで足先の動きを遅くするということは、ギアで減速するのと同じく、力を大きくします。
その分、電池が弱くても止まりにくくなります。


5) グリップ力を増やす!
1) ~ 4)を対策した上で、ロボットを重くしたり、足裏にタイヤゴムを履(は)かせたりして、地面との摩擦力を大きくするのは吉です(*5)。
相手に引っ張られて体勢を崩(くず)し、足を浮かせられなくても推進の邪魔にならないよう足先に転がるタイヤを付けた上で、ラチェット機構により蹴(け)り出すグリップ力を確保する改造も見られました。
ミドルコースに相応(ふさわ)しいナイスアイデアですね!
*1 テキスト最後に掲載(けいさい)された高橋智隆(ともたか)先生のメッセージからも、試行錯誤(しこうさくご)してバランスを調整した形跡(けいせき)が見て取れますよ。
*2 ベベルギアが滑って削(けず)れると、より滑りやすくなりますので、スペーサー(隙間を埋めて固定するもの)として、ブッシュの他にワッシャーを追加したり、グロメットやマイタギアに替えたりして強化します。
*3 そうすると、左前0°、右後ろ90°、右前180°、左後ろ270°のように、90°回転する毎に4足が次々と均等間隔(きんとうかんかく)で地面を蹴(け)るようになります。
均等でないと、「足を着けて地面を蹴る」→「足を浮かせて前へ戻す」という一連の動作が下手(へた)になって推進効率(すいしんこうりつ)が悪くなったり、モーターの負荷(ふか)が過大(かだい)になって止まりやすくなったりします。
*4 本物のダックスフントには期待しないように…。
*5 これだけをやっても、止まりやすくなってしまいます。
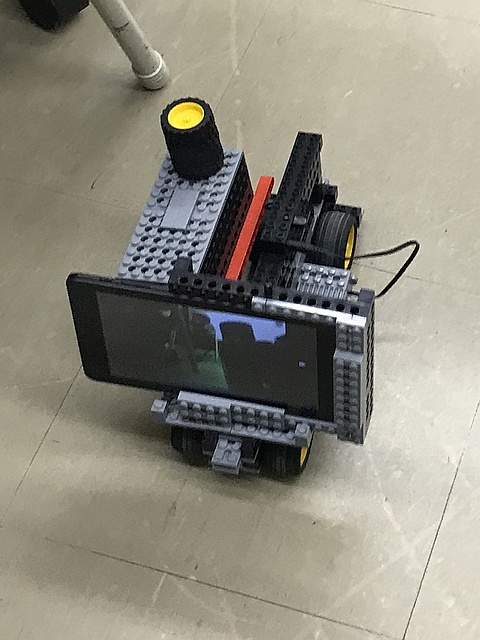
1.4 <アドバンスプログラミングコース『カメラボ(2)』>
撮影ロボット『カメラボ』の3日目と4日目では、タブレットを載せて移動したり、被写体の周りを回ったりするロボットを作りました。

このうち、2輪で走行するロボットのコントロールにはモーターを2個使ってしまいますので、シャッターはプログラムから押せなくなります。
そのため、タブレットを動画撮影モードにして、録画しながら移動させます。
走行ロボットの制御方式はライントレーサーに似ており、目新しさはありませんが、
ロボットの視点から動画を撮ると、見える世界が変わります。
多くの皆さんに、テキストを見ながら同じものを一所懸命に作ろうとする姿が目立ちますが、機能が再現できるのであれば、そこにこだわる必要はありません。
ロボット製作を早めに終わらせ、改造や作品作りに時間を割きましょう。

手順通りにこなす作業は、ロボットやAIの方が得意です。
正確さとスピードにおいて、人間に勝ち目はありません。
AIには何かを創造する能力はありません。(今のところはね)
人間の唯一の強みである創造性が、これからの時代を生き抜くカギになります。
今回、オリジナル作品を何一つ作れなかった人は、取り組み方を改めてください。
そのまま社会に出た暁(あかつき)には、ロボット上司にこき使われますよ?
先月に続き、ジャンルを問わず、皆さんの面白い作品を紹介します。
【斜めの世界】 - タイムラプス撮影作品
http://robocobo.sakura.ne.jp/blog/robot/adv1-1811-1.mov
タブレットを徐々に傾けながらコマ撮りすることで、世界が傾いていくような面白い映像効果が得られました。
【あちらからの使者】 - タイムラプス撮影作品
http://robocobo.sakura.ne.jp/blog/robot/adv1-1811-2.mov
タブレットを逆さまにしてコマ撮りすることで、天井を這っているような不気味な世界観を狙いました。
トアが勝手に開いたり、使者や照明が途中で消えたりと、現実では起こらない現象を見せられるのもタイムラプス撮影ならではです。
【マッスルえもん】 - タイムラプス撮影作品
http://robocobo.sakura.ne.jp/blog/robot/adv1-1811-3.mov
落書きのセンスが秀逸です。
この絵をホワイトボードに描いただけでは単なる落書きですが、タイムラプスで過程を見せることにより、立派な動画作品になりました。
一番人を笑わせた作品かもしれません。
【ロボット教室へGO】 - ロボット走行動画
http://robocobo.sakura.ne.jp/blog/robot/adv1-1811-4.mp4
教室の入り口からの道のりを動画にしたものです。
見慣れたはずの景色も、視点が変わると新鮮ですね。
小動物の視点に近いですので、ペットに近づけながら撮影しても面白そうです。
【カメラボの車窓から】 - ロボット走行動画
http://robocobo.sakura.ne.jp/blog/robot/adv1-1811-5.mp4
この作品では、走行ロボットをSLに見立てています。
カメラが撮る景色の中に、SLの特徴である煙突やボイラーが写るよう計算し尽されています。(それ以外はハリボテ!)
運転席の車窓さながらです。
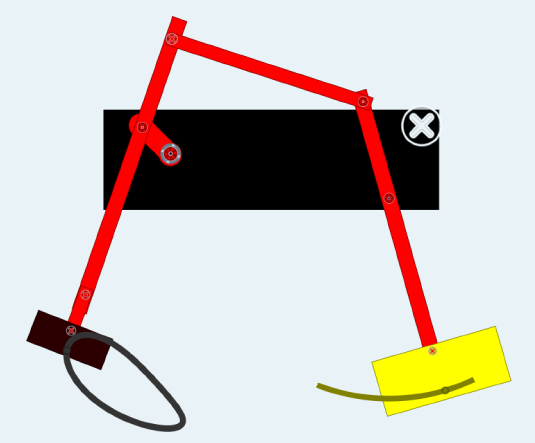
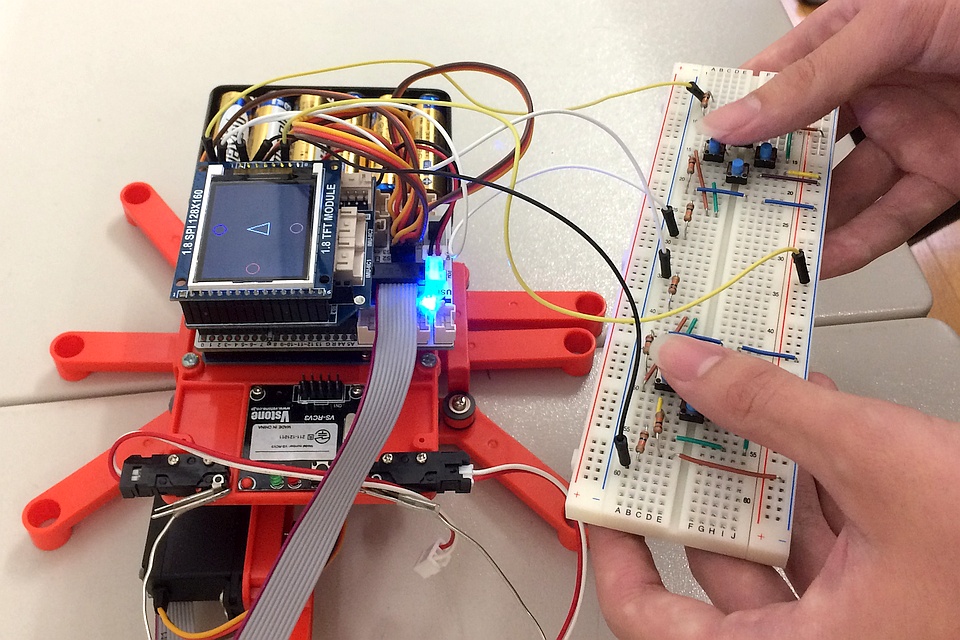
1.5 <プロ1年目コース『リンクロボット(2)』>
モゾモゾ歩く多脚リンクロボットの2ヶ月目です。
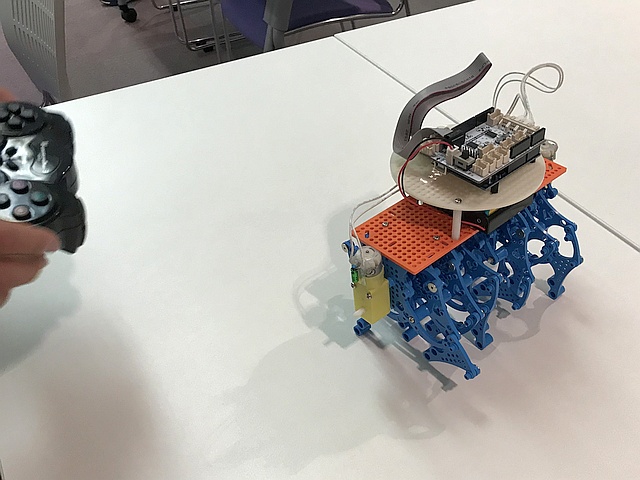
前月の製作の過程で、曲線に富んだパーツをいくつも繋ぎ留めていくので、とても複雑に見えるリンク機構ですが、“節”(ジョイント部分)を直線で結んで考えれば、いくつかの変形する4節リンクを組み合わせた構造と捉えることができました。
その一部のパーツ(中間リンクや従動リンク)を好きな方向に好きなだけ延長して、手足のような動きを作り出します(*1)。
4節リンクのうち、対向する2辺が等長の平行リンクでは、平行四辺形を保ちつつ整った変形を見せますが、
不等長になると、1辺(駆動リンク)を一定の速さで動かしていても、対向辺(従動リンク)では、角度によって異なる速さ(*2)で伝わったり、途中から逆回転したり、中間リンク(*3)と一直線に突っ張って動かなくなるか、回転方向が定まらずに「カクッ」と引っ掛かる状態(死点、特異点)になったりしました。
この死点または特異点は、どのリンクを駆動するかによって全く変わるので、駆動リンクと従動リンクの別に留意し、膠着(こうちゃく)状態を回避するよう設計することが重要なのでした。
ロボット教室で学習した、自動車や蒸気機関車のピストン式エンジン(*4)でも、車輪とピストンのどちらを駆動するかによって、引っ掛かりの有無が変わりましたね。
左右の脚を2個のモーターで独立して可変速度(正逆を含む)で駆動できるため、それぞれをベクトル(矢印)で表した作図により、合成された進行速度や回転中心(カーブの回転半径)が求まる考え方も学習しました。
あとは、手動(ラジコン式)プログラムだろうが、自動(タイマー式)プログラムだろうが、自律(センサー式)プログラムだろうが、左右それぞれのモーターに、どんな順序・条件・計算式で、どれくらいの数値(電圧)を与えればよいかという問題に落とし込めます。
最終月では、「感じて考える」自律型ロボットにバージョンアップしていきます。
*1 今月のミドルコース『ロボワン』でも学習した、てこクランク機構が基本原理です。
*2 ギアの増速・減速(てこの原理)と同様、力の大きさは反比例して伝わります。
つまり、
仕事[J = W・s] = 力の大きさ[N] × 動いた距離[m]
が変わらないように、または、
仕事率[W = J/s] = 力の大きさ[N] × 速度[m/s]
が変わらないように、エネルギーが伝わります。第3回テキストp.4~7参照。
*3 駆動リンクと従動リンクを繋ぐリンク。第3回テキストp.3~7参照。
*4 スライダークランク機構とも呼ばれます。第3回テキストp.12参照。
1.6 <プロ3年目コース『卒業制作 発表会』>
プロコース内容のレベルと密度が高かったので、3年間の集大成とまではいきませんが、
11/11(日) 10:30~ 東福間教室の9月卒業生4名にオリジナルの卒業制作品を発表してもらいました。
限られたハード資源(主にマイコンのメモリ容量や空きI/Oピン数と競合上の制約)に紆余曲折しながらも、
●4方向・4色玉・4色敵機を使い分けたシューティングゲーム
●独自仕様の仮想CPUと、その上で動作するアセンブラ言語による計算処理
等を披露してくれました。やはりビデオゲーム派だから、全員ソフトウェア作品でした。
習ったようで理解の及んでいなかった壁に当たり、そこを深く掘り進んだ人はより深く成長し、そうでない人(?)もそれなりに、自分を発見したことでしょう。
何度も伝えたように、自ら苦心して創作してみなければ本当のスキルは身に付きませんが、
未だ不足でも、経験したこと・体系を知っていることもまた大きなアドバンテージ、人生にヒントをくれます。
今は信じられないかもしれませんが、経済的にも、佐藤自身がそうであった(そうでありたい…)ように、ご両親に供して頂いた学費を生涯では十数倍、いや余裕で数十倍にして返してくれるものと信じます。
「もう教えることは無い、あとは好きに勉強してね」
を佐藤からの餞(はなむけ)の言葉とさせて頂きます。
卒業おめでとう! そして、今までありがとう!
2. 今月の課題
<スタートアップ(全コース)>
特にありません
<プライマリーコース>
- オリジナル図形プリント
<ベーシックコース>
- オリジナル課題プリント(3面図+設問)
- 上記授業内容を精読する(概ね3年生以上/低学年は補助の下で)
<ミドルコース>
- オリジナル課題プリント(3面図+設問)
- 上記授業内容を精読する
<アドバンスプログラミングコース>
- オリジナル課題プリント(見取図+設問)
- 上記授業内容を精読する
<プロ1年目コース>
- 特にありません
3. 今後の授業スケジュール
◆とばた教室への振替提携を中止させて頂きました。
◆八幡東2/2→2/9へ一週ずれます。
◆小倉北2月・3月は一週ずつ遅れます。
◆小倉南 3月は一週ずつ遅れます。
――――――――――【佐藤教室長】――――――――――
[東福間]第1・3土原則
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドプロ
⇒ 12/1, 15, 1/5, 19, 2/2, 16
[中間]第2・4土原則<なかまハーモニーホール>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドプロ
⇒12/ 8 第1回 3F会議室2
12/22 第2回 3F会議室2
1/12, 26※, 2/9※, 23
※1/26, 2/9はハーモニーホール利用不可の為、代替施設(未定)で開催します。
[小倉北]第1・3日原則<ムーブ>
- 10:00~ ベーシック/プライマリ
- 13:00~ ミドル
- 15:00~ アドプロ/ロボプロ1年目
⇒12/ 2 第1回 5F小セミ
12/16 第2回 5F小セミ
1/6, 20, 2/10※, (17), 24※, 3/10※, 24※
※教室都合の為、2月・3月は一週ずつ遅れ、10日と24日の予定です。
2/17は臨時振替日(定員8名・有料540円)です。
――――――――――【菅本教室長】――――――――――
[とばた]第2・4土原則<ウェルとばた8F>
- 13:00~ 全コース(プロを除く)
⇒ ご利用がなく、運用システムも異なる為、提携を中止させて頂きます。
――――――――――【中野教室長】――――――――――
[八幡東]第1・3土原則<レインボープラザ4F>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドプロ
⇒ 12/1, 15, 1/5, 19, 2/9※, 16
※2/2はレインボープラザ利用不可の為、一週ずれます。
[小倉南]第2・4日原則<総合農事センター2F>
- 10:30~ ベーシック/プライマリ
- 13:00~ ミドル/アドプロ(/ロボプロ1年目)
⇒ 12/9, 23, 1/13, 27, 2/10, 24, 3/17※, 31※
※教室都合の為、3月は一週ずつ遅れ、17日と31日の予定です。
4. お知らせ
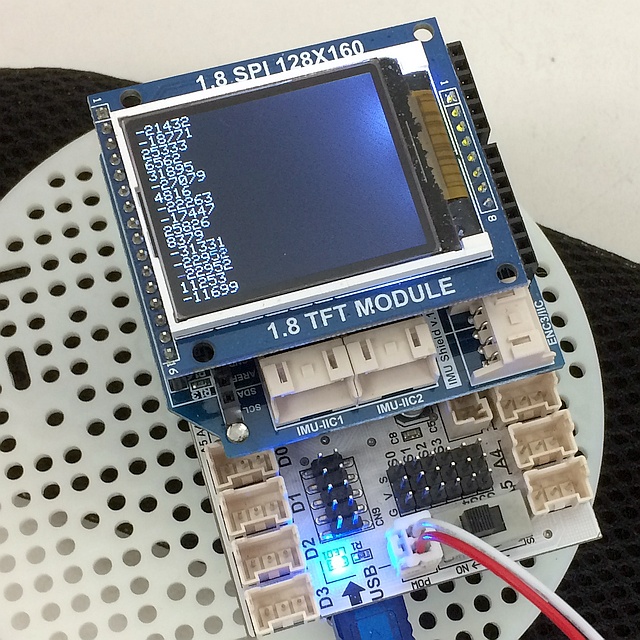
1) IchigoJamマイコンプログラミング定期講座スタート!http://robocobo.sakura.ne.jp/blog/lab/IchigoB1812.pdf
10/8, 12/2スタートアップ講座に参加された皆さんに、
実践的なプログラミングのテクニックを身に付けてもらう定期講座をスタートします。
(未受講でスタート希望の方は、お早めにご相談下さい)
各回ごとに習得テーマを決め、ゲーム(初級コース)を作り上げます。
上級コースまでに、外付けの電子デバイスを制御します。
受講できない回があっても大丈夫。なぜ?
手取り足取り講義するのではありません。そんなのタイクツで聴いていられません。
テンポよく、プログラミングのヒントと応用例に触れ、気になるところは帰って自分で探求してもらいます。
そして、プログラミングの回数をこなすことです。マスターには、それしかありません。
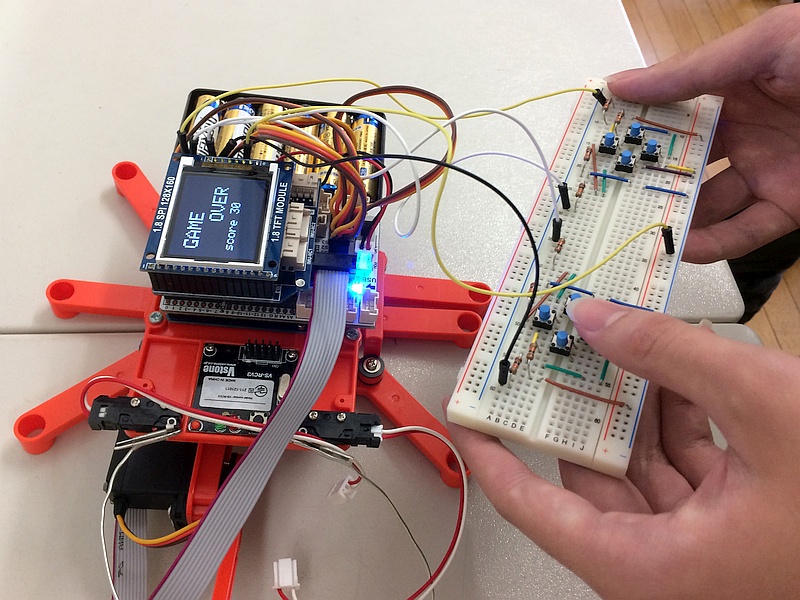
初級コース最初のテーマは「サウンド」!
クリスマスの曲を次々に演奏するミュージックボックスにしてみたり、音当てゲームを作ってみたり、冬休みの研究テーマにぴったりでしょう。
アドプロの音より、もっとずっと自由に演奏できますよ!
【講座名】
IchigoJam初級ゲームプログラミング ~サウンド編~
【内容】
電子オルガンや自動演奏、音を使ったゲームに必要な
キー入力コード/繰り返し/乱数/配列/画面アクセス等を扱う命令・制御文を学びます。
【講師】中野・佐藤
【会場】北九州パレス(勤労青少年文化センター) 2F
【日時】12/24(月・祝) 10:00~15:00 (昼休み12:00-13:00)
【対象】下記の小4~中学生 15名(保護者同伴可)
a) スタートアップ修了者
b) スタートアップ受講可能な方(要ご相談)
【必須費用】
a)の方 5,940円(受講料5,400円+材料費540円)
b)の方 12,960円(a)+SU受講料4,320+キット代2,700円)
【オプション費用】
B-1) 7インチモニター 3,780円(持込み必須/モデル不問)
B-2) PS/2対応USBキーボード1,350円(持込み必須/モデル不問)
【申込方法】下記を指定の上メールにてお申込み下さい。12/17〆切・先着順です。
<スタートアップ種別>
a) 修了済み b) 受講希望
<希望オプション>
B-1) 7インチモニター B-2) キーボード
【申込条件】
- IchigoJam本体・周辺機器の持込品が故障した場合は、代用品を購入頂きます。
- 原則として、1月お引落し額(2月分)に加算して徴収させて頂きます。
12/10~キャンセル・欠席により空席が発生した場合は返金できません。
(お申込品とテキストのみお渡しします)
2) 第2回ロボプロ全国大会の様子
10/27(土) 千葉工業大学 東京スカイツリータウンキャンパス内にて開催された大会の結果とダイジェスト動画を公開しております。
とてもハイレベルですので、是非ご参考下さい。
【大会動画】 https://youtu.be/51SNvvL4ubk
【大会結果HP】https://kids.athuman.com/robo/event/convention/rp2018/
3) KIGSセミナー聴講のお薦め
去る5/19(土)【科学の歴史(1) ~力学はどのようにして創られたか】の続編です。
ロボット教室で力学のセンスを学んでいる高学年~中学生の皆さんにお薦めします。
【科学の歴史(2) ~明治日本、西洋の科学と出会う】
幕末~明治の人々は、新しく入ってきた西洋の科学をどのようなものとして捉え、それをどのように受け入れていったのでしょうか。
ここでは、物理学の場合を取り上げて、近代的な理工学の教育・研究が日本で始められた経過を見ていくことにします。
時 間 12/1(土) 13:00~15:00
会 場 北九州イノベーションギャラリー(KIGS)内 プレゼンテーションスタジオ
参加料 無料
講 師 有賀 暢迪(ありが のぶみち)氏 国立科学博物館 研究員 博士
申込み https://www.kigs.jp/event/2018/10/382.php
4) 電子工作LEDクリスマスツリー 限定100p交換!
先日11/23(金・祝) 北九州イノベーションギャラリー(KIGS)共催にて、
デジタルものづくり教室『電子工作でピカピカ光るオリジナルイラストツリーを作ろう!』を講義し、
早々に一般の親子16組に満席を頂き、とても好評に終わりました。
https://www.kigs.jp/event/2018/10/386.php

在庫が4キットありますので、下記の優先順・先着順にお譲りします。
<プレゼント条件>
1) 宿題ポイント100pと交換
2) 宿題ポイント80p以上と交換(20pまで貸与)
下記を明記の上、教室長までメールでご希望下さい。
- 所有ポイント数
- はんだ付けキット or 完成品
5) 10月課題 高得点者 []内は教室と学年
◆プライマリ【4名平均 図形5.0】
5点…大井[小倉北1], 川田[小倉北 年長], 末吉[小倉北 年長], 砂川[小倉北 年長]
◆ベーシック【16名平均 図面2.2+設問3.0=5.2】
10点…なし
9点…なし
8点…柴田[小倉北3], 橋本[小倉南1]
7点…筋田[東福間3], 林田[小倉南1], 山崎[小倉南3]
◆ミドル【30名平均 図面2.6+設問2.6=5.2】
10点…なし
9点…荒木[小倉北4], 馬渡[小倉南4]
8点…大和(彩)[小倉北4]
7点…谷川[八幡東5], 重藤[小倉北7], 原[小倉南5]
東福間・中間・小倉北教室 佐藤 / 八幡東・小倉南教室 中野