2.今月の課題
3.今後の授業スケジュール
4.お知らせ
1. 10月授業内容
1.0 <スタートアップ>
割愛します。
1.1 <プライマリーコース『SLロボロコ』>
割愛します。
1.2 <ベーシックコース『ぐるぐる進む君』>
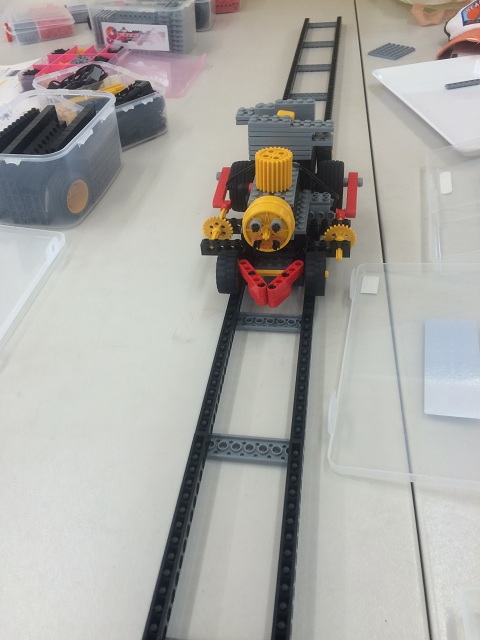
二足歩行ロボットです。左右の足が交互(こうご)に前後するのだから、歩くのは当たり前?
よく考えてみます。
人間やアシモのように、片足を上げながら歩くほど高度ではありませんから、地面についたまま前後に往復するだけの足に前も後ろもなく、その場で足を摺(す)るばかりでうまく進みません(*1)。
1日目のロボットがこの形態であり、あまりスマートな歩みではなかったでしょう。
しかし、人間は、ぶかぶかのスリッパを履(は)いたときでも、摺り足をしながら前に進むことができます。
同じ摺り足の動きで後退することもできます。無意識に何かを切り替えています。

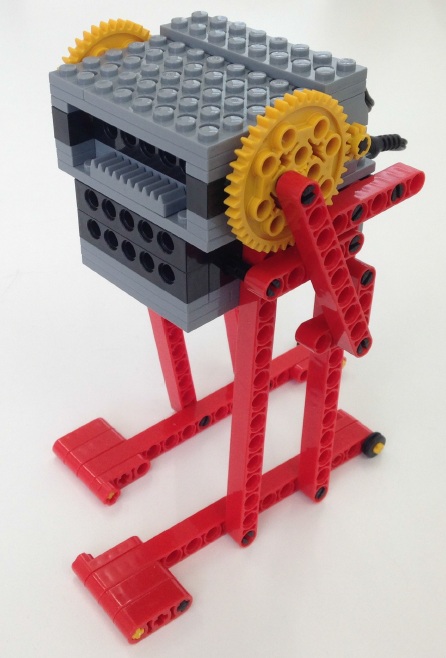
そうです、重心ですね。2日目で、ちょうちんアンコウのごとく頭から生えた角(?)が、その重心移動メカニズムです。
もちろん、付ければいいってものではありません。
角の先に付けたタイヤL(カウンターウェイト=重り)に揺(ゆ)り回されるわけですから、足の動きとの同調(位置関係=位相)を考えないと、逆にバランスを崩してすぐに転んでしまいます。
しかし、この位相は30°単位(*2)で調整できますから、後ろに下がる方の足に重心を傾け、前へ出る方の足を浮かせ気味にすれば、見違えるようにスタスタと歩くことができるように変身します。
その理由を詳しく見てみましょう。
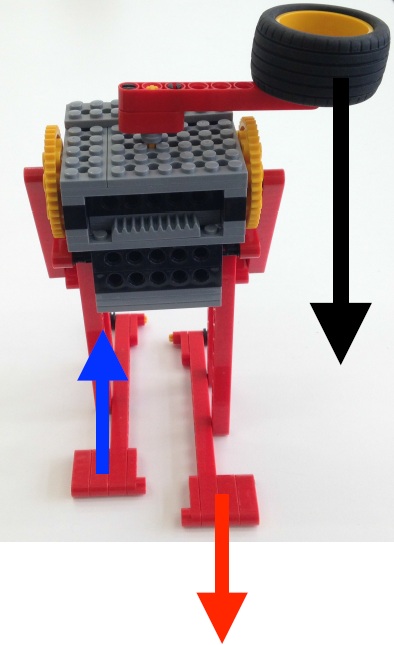
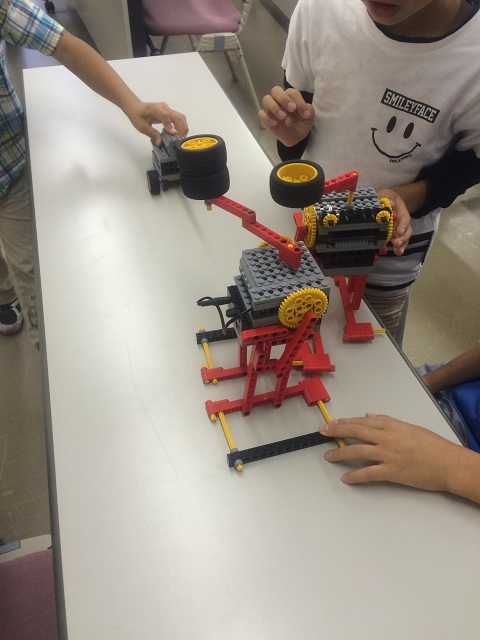
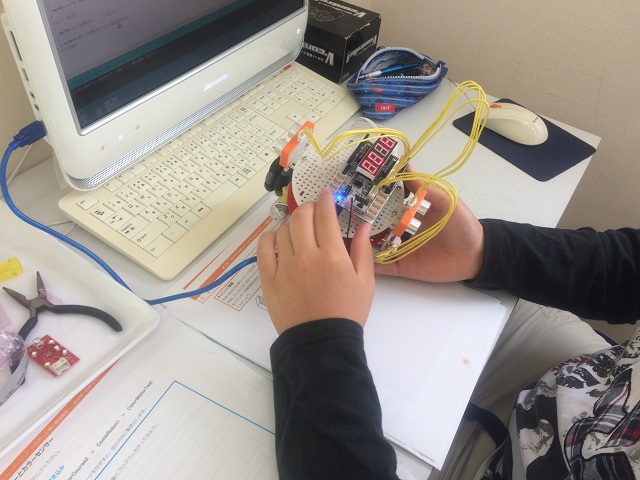
写真のように、ロボットに向かって右側にタイヤLがあるときを考えてみます。
タイヤLは黒矢印(↓)の重力を受けています。この重力は、角を伝って、ロボットを右側に倒そうと作用します。
つまり、向かって右側の足には赤矢印(下向き↓)の力が、左側の足には青矢印(上向き↑)の力が加わり、向かって右側の足は重く、左側の足は軽くなるのです。
左右の足への重みが変わることで、どんな良いことがあるのでしょうか。
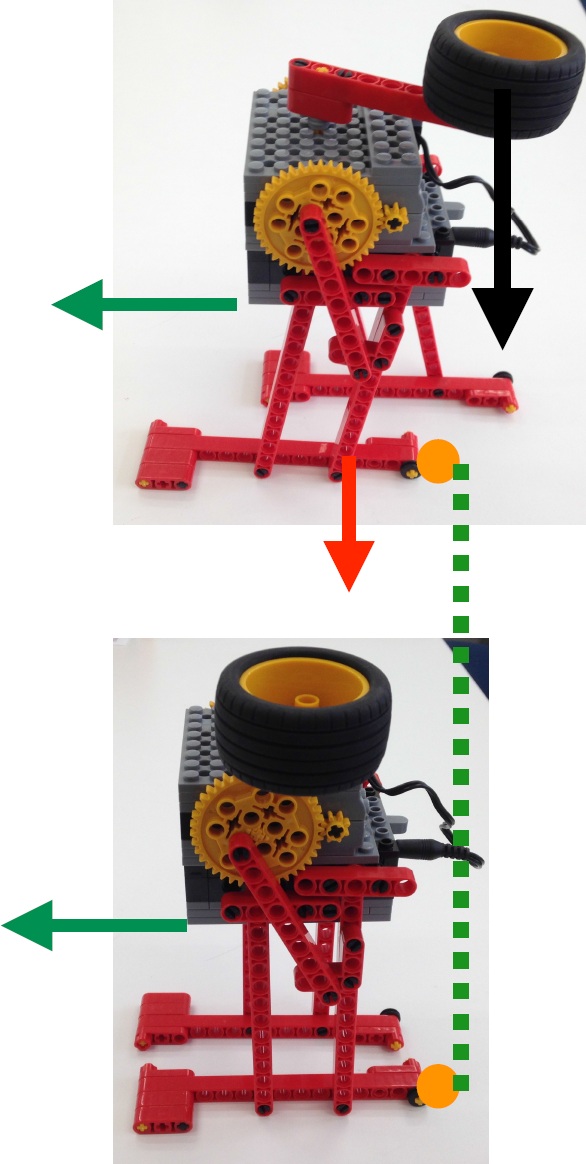
写真は、ロボットの左足がめいっぱい前に出て、これから後ろに下がろうとする瞬間です。
このとき、左足には赤矢印(↓)の力が加わっているため、床との摩擦力が強く働き、滑(すべ)りにくくなります。
そのため、左足を後ろへ動かそうとする力は、ロボット上体を緑矢印(←)の方へ動かそうとする力となって、前進させるのです。
同時に、軽くなっている方の右足は、床との摩擦力が弱いために、滑りながら前へせり出し、次の一歩に備(そな)えることができます。
もっともっと速く歩かせるために、電圧アップ(電池4→5本)したり、脚(あし)を長くして歩幅を大きく取ったりしてみましょう。
すると、安定感がなくなり、上体がヨタヨタに振れるところを、カウンターウェイト(*3)で相殺(そうさい)し、さらに、足裏を広げて転びにくくします。
または、ラチェット(*4)を知っている人は、スケートのようにスーッと滑らせることも夢ではありませんよ!
二足歩行ロボットというのは、なかなか奥深いテーマなのですよ。
*1 足にグロメットを付けると、後方へ蹴(け)る摩擦力が働き、少し前進するようになりますが、逆に足を前に戻すときには、この摩擦力がじゃまになります。
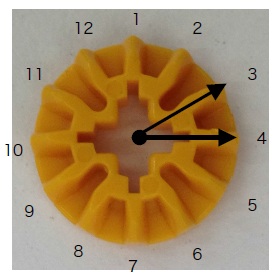
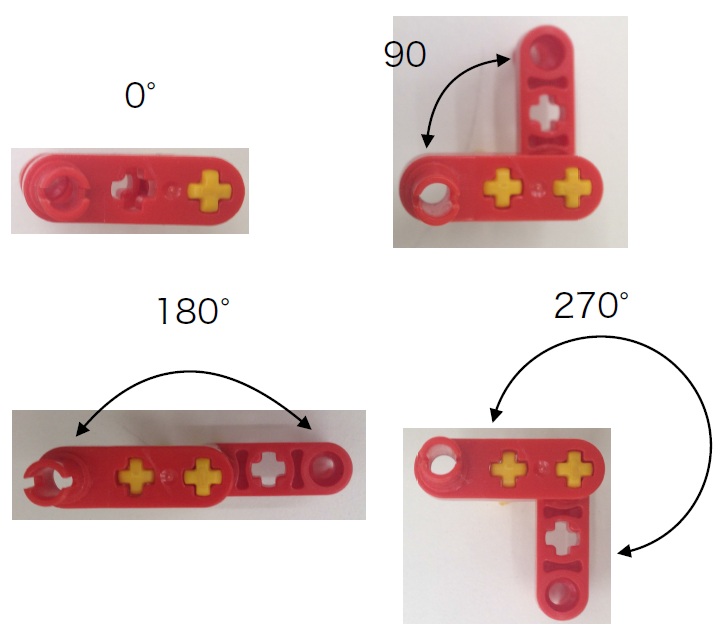
*2 タイヤLを回す角の根元には、12の歯をもつマイタギアが取り付けられており、これが別のマイタギアと噛(か)み合って回されています。
つまり、噛み合わせを1つずらして取り付けるということは、角度にして 360÷12=30°ずつ変更できるということですね。
*3 てこの原理により、重いほど、角を長くするほど効く。
*4 一方向へのみ回転させる機構。ミドルコース『ロボワーム』を参照。
1.3 <ミドルコース『ロボワーム』>
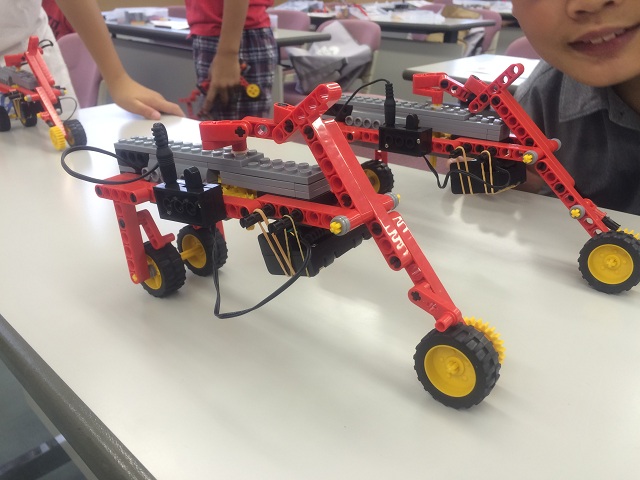
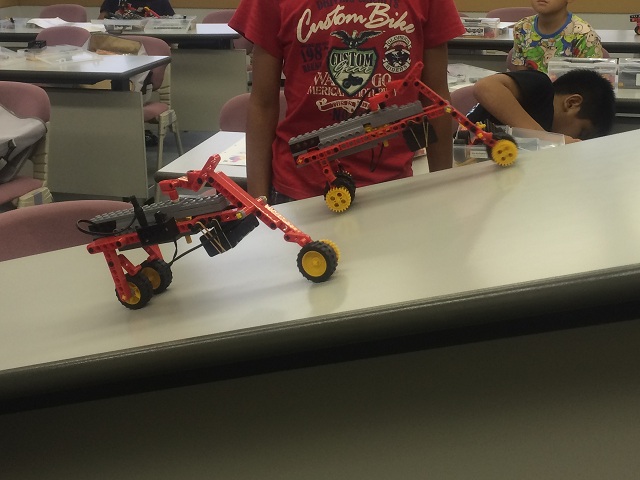
見た目は3輪バイクのようですが、尺取り虫(シャクトリムシ)をモチーフにしたロボットです。
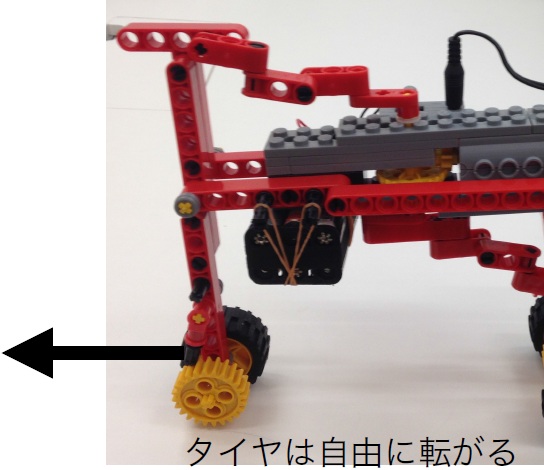
1日目では、前輪の付いたロッドを前後に往復させています。
この動きは、クランクというリンク機構を用いて、モーターの回転運動を往復運動に換えて実現しています。
しかし、ロッドの往復に合わせて、前輪は前後に転がるだけであり、推進力とはなりません。

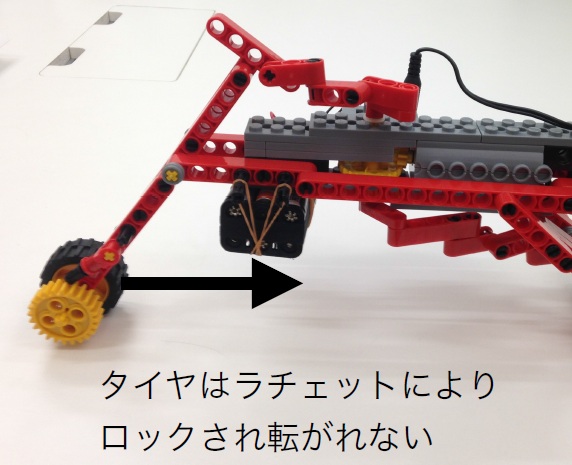
ところが、ただ1点の部品(ペグS)を装着するだけで、見違えるように前進するように変わります。
ラチェットという機構で、一方向への回転のみを許し、反対方向へは回らない仕掛けです。

皆さんの身近なところでは、自転車のペダル(正確にはチェーンで駆動される後輪のハブ内)に使われており、前方向にはしっかり噛み合って回転を伝えますが、逆方向にはチッチッチと音を立てて空回りする仕組みにより、ペダルを休めても車輪は回り続けることができます。
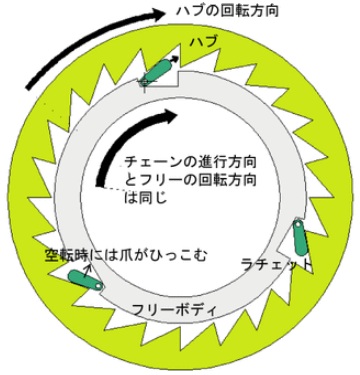
写真は、後輪ハブ(車軸部分)を分解したものです。
大きな力に対応できるよう、ギアの周りにラチェットが3つ付いていますが、基本的な仕組みは、ギアMとペグSの噛み合わせ方と同じです。
このラチェット機構を実現するために、前輪に重ねたギアMの歯にペグSの角を当てました。
すると、ロッドの往復に合わせて、前輪と後輪が交互に前へ転がることを繰り返し、本体が前進するようになりました。
まるで、尺取り虫が胴体を曲げたり伸ばしたりして進む様子です。
後輪が前へ転がるのは、ロッドが後ろへ戻る際に前輪が逆回転しないようロックされ、本体(と一体化した後輪)が前輪に引っ張られるようになったためです。
前輪が前へ転がる際は、本体(および後輪)は止まったままか、むしろ反動で少し後退します。
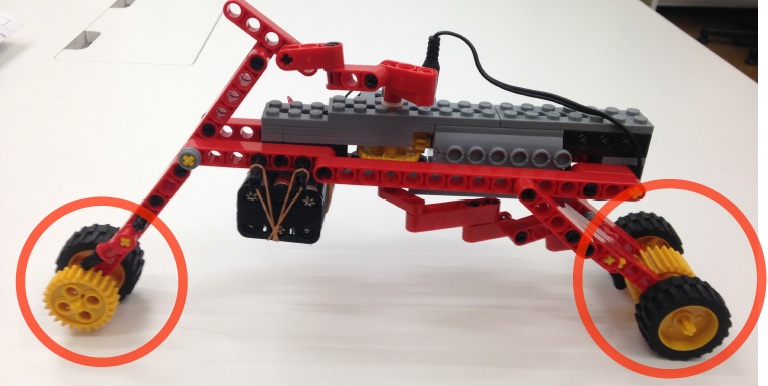
2日目に、後輪にも同様に往復するロッドとラチェットを組み付けました。
これで、後輪の後退も防げるようになり、推進効率が上がりそうです。
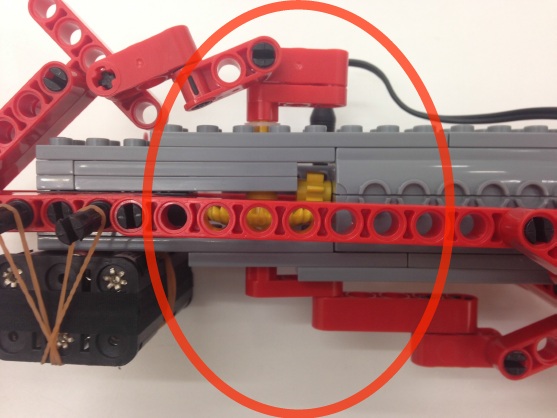
前輪と後輪のロッドが往復するタイミング(のズレ)は自由に変更できますが、一番スムーズに前進するタイミングはどのようなものでしたか?
どうあがいても(前後のロッドで漕ぐタイミングがどんなでも)、前後輪ともラチェットを付けて後退を阻止するのだから、1日目(前輪ラチェットだけ)のロボットよりは前に進みやすくなると思うでしょう?
ところが、ロボットを横から見て、前後のロッドがハの字形に開いたり閉じたりするようなタイミング(前後クランク位相差0°)が最も優れます。
同時に前後するようなタイミング(位相差180°)でクランクに取り付けると、恐ろしく推進効率が下がり、ちょっとの坂道でも上れなくなります(*5)。
クランク位相差90°では、その中間といった感じです。

何故でしょうか?
これは“スケーティング”の要領に似て、先行する前脚と、蹴り出す後ろ脚の機能分担ができるからです。
人間が歩けるのも、尺取り虫が進めるのも、地面を捉える後部があってこそ、前部が地面上を浮いて(または滑るように)進めるわけです。
だって、両脚を揃えて前後させても、体が前後に傾くだけで、何を支えにして進めと言えるでしょうか?
『ロボワーム』のように2本脚が前後に付いていても、同じことです。
尺取り虫は知っているのでしょうか。
*5 平坦なら少し進みますが、本体を前後に振る“反動”で動いている程度で、後ろに下がったとしても不思議ではありません。
1.4 <アドバンスコース『ライントレーサー』>
正確にはプレ・アドバンスコースで、11月からの本コースに向けた練習テーマです。
とは言え、全国大会競技に通ずるアドバンスコースの醍醐味テーマです。
初めてモーターを2個使用し、初めての光センサーで制御します。
もはや組立手順は載っていません。
完成図(四面図)や配線図を参考に、自力で機能を実装していきます。
光センサーの仕組みも学習しました。
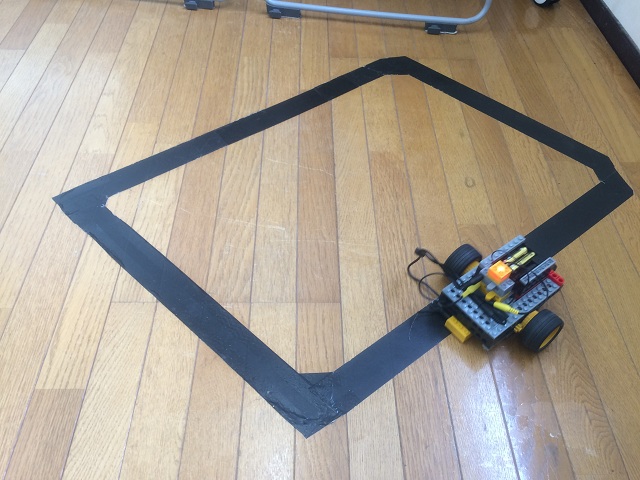
最後の競技は、やはり『ライントレーサーGP』!
ミドルコース『ウォールフォロワー』で用いた段ボールのひし形周回コースを一回り大きくかたどるように、黒い布テープを這わせます。
ゆるいコーナーあり、タイトコーナーあり、サーキットの雰囲気満点です。
マシンは、黒テープの縁(光センサーによる白黒検知の境界)に沿って、左右の駆動輪を細かく切り替えながら自律的にコースを周回します。
『ウォールフォロワー』に比べて、2モーターの高速制御によるスムーズな走行を見せつけてくれました。
コースアウトすることも少なく、安定感にまだ余裕がありましたね。
それはそうです、光センサーという立派な半導体制御回路を使っているのですから、輪ゴムに負けるわけにはいきません。
ただ、全国競技レベルには程遠いですよ。
コースアウトするかしないか、ぎりぎりまでスピードを上げ、光センサーとモーターの応答速度の限界まで追求しますよ。
1.5 <プロ1年目コース『リンクロボット(1)』>
Autumn(秋)タームとして、多脚リンクロボットを製作し、プログラム制御するまでの3ヶ月が始まりました。
脚がうにょうにょ動き、にょろにょろ走り回る姿態を空想して、否応無しに期待感が高まります。

1ヶ月目は、2本1組の脚リンクから組み立てていきます。
1組2本の脚だけでも、うねうねと有機的な動きを見せます。
これが6組12本も組み合わさるとなれば、それは壮麗なのか、不気味なのか、いずれにせよ楽しみです。
図面や説明文の読解、パーツの向きや重ねる順番の照合、ネジやナット締め等、単体でも苦労する脚リンクを複雑に組み合わせるのですから、
空間認知、合理的思考、工作的センス(力加減、器用さ)に始まる、あらゆる能力を総動員して完成せねばなりません。
過去にも、大半の生徒が授業時間内には終わらず、家庭で進めて完成しても動かないか、動きがギクシャクしたり、自己分解してしまったり…。組み立てミスも続出するような代物です。
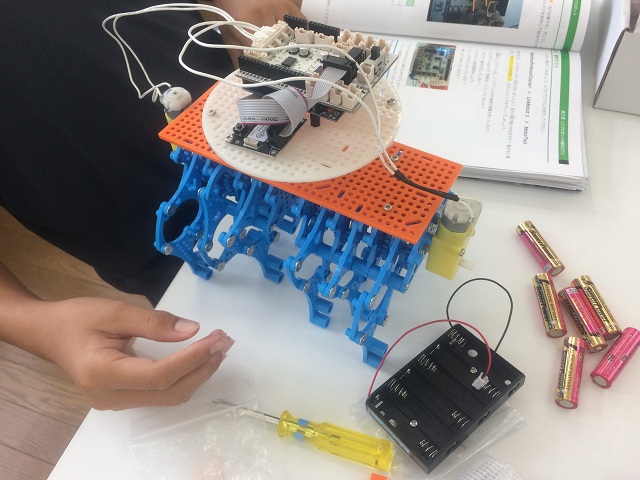
2日目に、マイコンボードや無線モジュールを搭載し、モーターを回して脚の動きをチェックしました。
苦労の甲斐あって、その動きは有機的というか、節足動物的というか、初めて目にする者をゾッとさせるものがあります。
非日常性を奏するには十分過ぎるインパクトです。
次月では、コントローラーとプログラムを使って、思い通りにロボットを操縦します。
1.6 <プロ2年目コース『センサーロボット(1)』>
いよいよ、2年目コースに突入です!
2年目コースも、エンジニアの卵に知っておいて欲しいエッセンスが色濃く詰まっています。
時に、大学生や大人でも十分手応えのある高度な内容に触れますが、今は完璧に理解できなくても、怖じけず、気取らず、積極的に取り組んでいけば、工学的センスが身に付いていきます。
そういうスタンス(姿勢)とセンス(知見)は、将来の進路にも仕事にも、必ず活きる時が来るものと思います。
知見は、進路や仕事の道を照らすと同時に、選択肢をも増やすものですが、
一方で、知見を広げるというのは、なかなか時間と手間のかかることであり、裏を返せば、とても貴重なことでしょう。
何事も当たり前と思わず、不思議に疑って、存分にセンスを磨いてください。
さて、これから3ヶ月で学習する『センサーロボット』は、1年目のオムニホイールロボットに、1年目の超音波センサー2個とカラーセンサーを取り付けたものです。
表示部の8×8ドットLEDマトリクスだけ、2年目パーツから7セグメントLED(*6)を取り出して代用したように見えますが、中身が大事ですよ。

中身とはプログラムですね。少ない感覚器官や肢体のロボットでは、それをどう使いこなすかが重要です。
1年目のプログラミングではまだまだ、これらのセンサーを複合的に使いこなせていません。
元来、思い込みや勘違いだらけの人間に、一縷(いちる)の誤りも許されないプログラミングは向いていません。
今のところ、他にやる主体が無いので、その中で、比較的向いている人や、好きな人がやっているだけです。
プログラムには間違い(バグ)が付き物です。
それどころか、正しいプログラムにすら、それを読む人間(それを書いた張本人すら)が誤った解釈をし、誤った改造(バグ)を入れます。
もう、どうしようもないですね、人間は。
だから、パソコンやスマホのOSもアプリも、アップデートだらけですね。数学と異なり、間違いは仕方がないものとされています。
しかし、それでも、品質を向上させる方策は必要です。その一つが「フローチャート(流れ図)」なのです。
やはり、文章(プログラム)と図(フローチャート)の直感的理解度・スピードは桁違いです。
書くべき作文の構想を練るときに、短い言葉で流れ図のようなメモを書くのと同じで、全景や過不足が把握しやすくなります。
一人でプログラミングする際は、このフローチャートを描くことが億劫で、ついサボりがちなのですが、およそ3ヶ月後の自分を苦しめます。
それ以上に、他人が製作し、自分とは異次元の設計思想に従った機械やプログラムをメンテナンスすることほど、苦労するものはありません。
そんなときに、設計図やフローチャートがあることでどんなに救われるか、どんなに嬉しいものか、計り知れません。
そんな見方を味わうことになるモノです。


テキスト以上の詳細な解説はナンセンスにつき割愛しますが、各種のセンサー動作プログラムを試しながら、
せっかくのフローチャートを参考に、少し高度化したプログラムの流れを把握し、いろいろ弄(いじ)ってみてください。
*6 通称「7セグ」で、7本の棒で数字を表示するデジタル表示器のこと。映画『バック・トゥ・ザ・フューチャー』世代、これの先進性に惹かれた少年は少なからず、今でもロマンを感じる現役のオジサンですが、高解像度ディスプレイが当たり前になった現代っ子には、ローテクの象徴のように見えるのでしょうか。
2. 今月の課題
次回授業日までに完了してください。◎は必須、○は推奨、△は任意です。○△は能力に応じます。
<スタートアップ/プライマリーコース>
特にありません
<ベーシックコース>
○ オリジナル3面図課題/裏面の授業まとめ問題
○ 上記授業内容を精読する
(概ね3年生以上/低学年は補助 or クイズ出題形式で)
<ミドルコース>
◎ オリジナル3面図課題/裏面の授業まとめ問題
◎ 上記授業内容を精読する
<アドバンスコース>
特にありません
<プロ1年目コース>
○ 上記授業内容を精読する(該当テキストページを見ながら)
◎ ロボット製作を完了する
<プロ2年目コース>
○ 上記授業内容を精読する(該当テキストページを見ながら)
◎ [USSMotorTest3]をベースに、前後の超音波センサーで別々の動作をさせる(1日目)
例1 前後にかざした手を追いかけるロボット
例2 前後の壁で跳ね返るよう往復するプロ版『う王さ王』
例3 前方の障害物で旋回し、後方の迫る敵から加速して逃げるロボット
3. 今後の授業スケジュール
日付の()は臨時、!は原則外、?は予定の意です。
[東福間]第1・3土原則
- 10:30~ ロボ・ミドル/アドバンス
- 13:30~ ロボ・ベーシック/プライマリ
・11/5※, (12※), 19, 12/3?, 17?, 1/7?, 21?, 2/4?, 18?
※ミドル以外の方は11/5、ミドルの方は11/12 10:30~お越し下さい。
[東福間プロ]第2・4日原則
- 9:45~ ロボ・プロ1年目
- 13:00~ ロボ・プロ2年目
・11/13, 27, 12/11, 25, 1/15!, 29!, 2/12?, 26?
[中間]第2・4土原則
- 13:30~ ロボ・ベーシック/プライマリ
- 15:15~ ロボ・ミドル
なかまハーモニーホール
・11/12 第1回 2F会議室1
・11/26 第2回 2F会議室1
・12/10, 24, 1/14?, 28?, 2/11, 2/25
[小倉北]第1・3日原則
- 10:00~ ロボ・ベーシック/プライマリ
- 13:00~ ロボ・ミドル
- 15:00~ ロボ・ベーシック/プライマリ第2部
11月は代替施設『商工貿易会館(シティプラザ)』での開催となります。
・11/ 6 第1回 シティプラザ501会議室(10:00~)
・11/ 6 第1回 シティプラザ603会議室(13:00~)
・11/20 第2回 シティプラザ601会議室
・12/4, 18, 1/8!, 22!, 2/5, 19
―――――――――― 振替提携教室 ――――――――――
振替希望は1週間前までにお願いします(許可制)
振替手数料540円/回をご負担下さい(お引落し)
所定コースのみお受けします
[八幡東]第1・3土原則
- 13:30~ ロボ・ベーシック/ミドル
レインボープラザ 42教室 by 中野司先生
・11/12!, 19, 12/3, 17, 1/7, 21, 2/4, 18
[とばた]第2・4土原則/第3土臨時
- 第2・4土 13:30~ ロボ・全コース
-(第3 土 10:00~ ロボ・全コース)
ウェルとばた8F by 菅本進先生
・11/12, (19), 26, 12/10, (17), 24, (1/7!), 1/14, 21!
[小倉南]第2・4日原則【振替専用教室として試験運用中】
- 10:30~ ロボ・ベーシック/プライマリ
- 13:00~ ロボ・ミドル
総合農事センター2F B研修室 by 中野司先生
・11/13, 11/27, 12/11, 25, 1/15!, 29!, 2/12, 26
4. お知らせ
1) 電池交換消耗した電池でロボットが動かないと、診断&交換で製作・進行が滞ります。
自らの責任で学習してもらうべく、下記の対応をお願いします。
・市販のバッテリーチェッカーを購入し、自ら残量を管理する
・高価なブランド電池を買わない(誤って短時間で消耗します)
・なるべく充電池を用い、毎回充電してくる
・教室サービス時、原則として電池代4本108円+診断料108円を加算
2) 宿題ポイント導入【ベーシック・ミドルのみ/中野司先生協同】
自主的に楽しく取り組んでもらえるよう、10月~オリジナルの図面課題を作成し、第2回目の授業で配布します。
毎月の授業まとめに則した課題も掲げますので、Blog閲覧の準備をお願いします。
提出物ごとに1~5ポイント色カードを進呈し、ポイント交換用景品を用意します。
3) スライドスイッチ強化改造サービス【教室独自】
新品は高価で、すぐ断線しますので、教室独自の強化改造サービスを始めます。
断線時は、原則として下記※を適用させて頂きます。
・バッテリボックス新品 572円: 問題ありません(故障時は買い替え)
・スライドスイッチ新品 789円: 問題はこちら (お薦めしません)
・スライドスイッチ改造※ 0円: 純正品(断線)⇒改造品への初回交換時
・スライドスイッチ修理※ 780円: 改造品の断線時
※スイッチ本体を破損・紛失している場合は、原価代789円を加算
東福間・中間・小倉北教室 佐藤