2.今月の課題
3.今後の授業スケジュール
4.お知らせ
1. 1月授業内容
1.0 <スタートアップ(全コース)>
割愛します。
1.1 <プライマリーコース『ロボダック』>
割愛します。
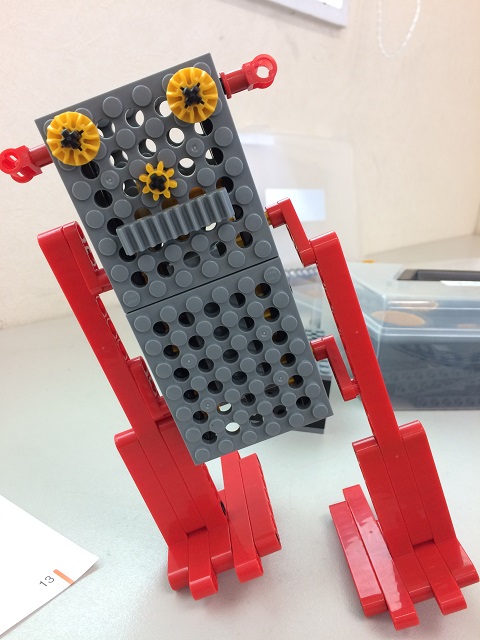
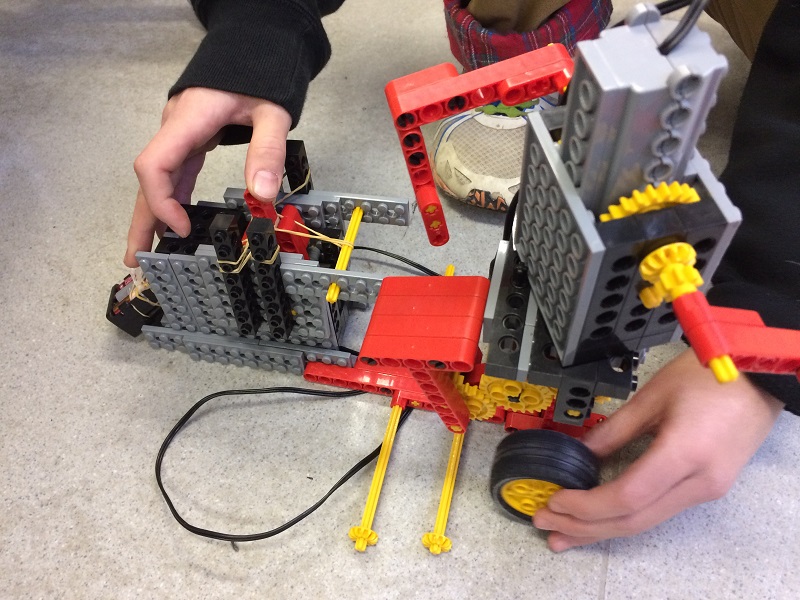
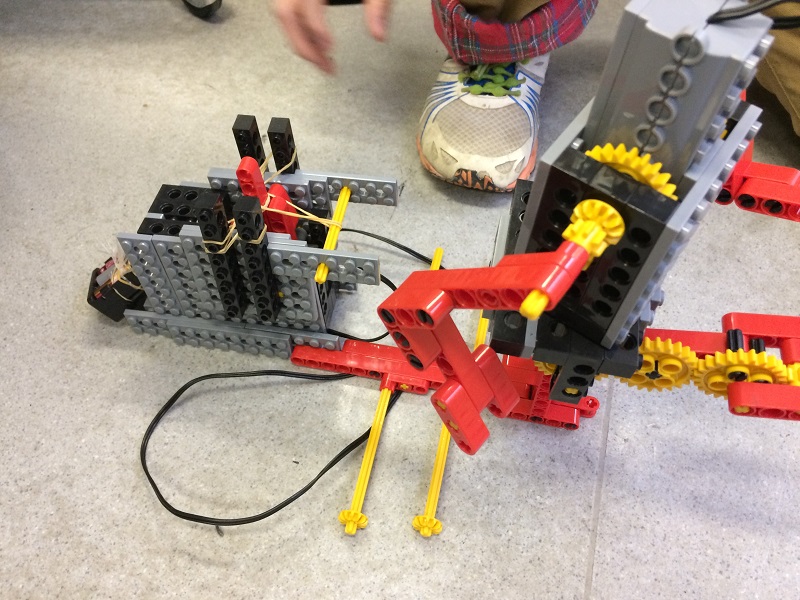
1.2 <ベーシックコース『ウォーカータクシー』>
人力車ロボットです。推進(すいしん)手段は二足歩行です。
交互(こうご)に前後する二足で前進するには、前→後ろへ移動する足で地面を蹴(け)り、後ろ→前へ移動する足はなるべく地面と干渉(かんしょう)しないような方策(ほうさく)が必要です。
両足が同じように地面と接触していると、前進する力と後退する力が拮抗(きっこう)し、その場でモジモジするだけです(*1)。
今回のロボットは、側面の上下2本のクランクが常に同じ角度を向きつつ(同位相)回転することで、脚(あし‐ロッド15アナ)を垂直に保ったまま円運動させています(*2)。
左右の脚では、180°ずらした角度(逆位相)のために高低差が激しく変化しますので、片足ずつ浮かせる方式と思いきや、両足が常に接地し、スムーズに歩きません(*3)。
また、片足を上げた分だけそちらへ大きく傾くので、倒れやすく不安定です(*4)。

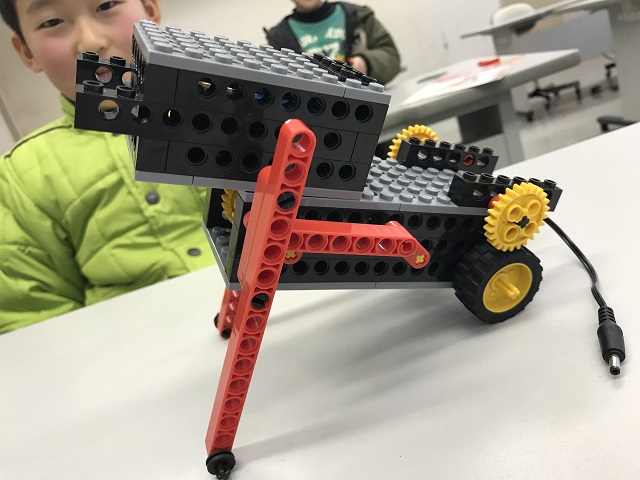
これを片足ずつ浮かせる秘訣(ひけつ)が、左右両輪を付けた“リヤカー”です。
ただ牽引(けんいん)しているだけではなく、リヤカー両輪+片足の3点支持を実現しています。
(二足歩行ロボットとしては、ちょっと反則技のような気もしますが…)

物体は、3点以上で支持することで、姿勢を安定に保てます。
カメラ用の三脚(さんきゃく)や三輪車のほか、自転車やバイクが停止時につく足やスタンドも同じ理由ですね。
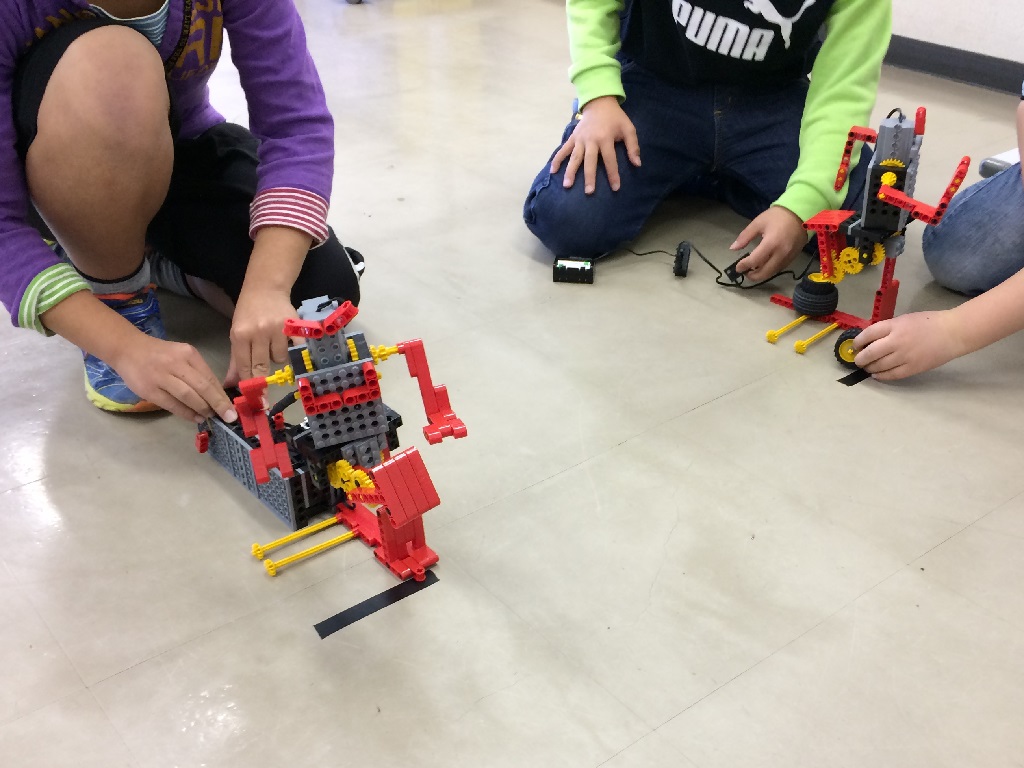
リヤカーをつなぐと、胴体(どうたい)を直立させたまま片足ずつ持ち上げ、快調に歩むようになりました。
中には、胴体を寝かせて頭部をタイヤで支え、滑(すべ)り止めした足先を突(つ)きながら進む独自の改造もありましたが、これも3点支持です。
3点支持によらないアイデアとしては、脚の向きが変化しない平行リンク(*2)の性質をうまく利用し、両脚の位相を揃(そろ)えて回し、寝かせた胴体の底面(背中)を地面に付かせたり、水平に浮かして少しだけ前に運んだりしながら進むアイデア(*5)が見られました。

最後は牽引(けんいん)力を競うべく、長机を傾けて、上り坂に挑戦してもらいました。
足裏がプラスチックのままでは滑りやすく、背が高いと後方へ転倒しやすい弱点が如実(にょじつ)に表れ(*6)、これも直立二足歩行ロボットの難しさを物語っています。

滑り止めとして、足にグロメットや輪ゴムを履(は)かせたり、中には、ロボット教室で学んだラチェット機構をタイヤに装備(そうび)して、急な坂道を上ってみせた“スーパータクシー”も現れました。
*1 二足歩行ロボットには、2016年10月の『ぐるぐる進む君』がありました。
これも、1日目ではモジモジ君に過ぎませんでしたが、2日目に重心制御を取り入れることで、両足が接地したまま摺(す)り足をすることに成功しました。

*2 平行リンクと呼ぶ機構で、長方形が潰(つぶ)れて平行四辺形になるように、リンク外形を変えられます。スペースワールドのラッキーバスにも使われていました。
*3 わずかに歩く場合は、たまたま前進に有利な重心移動や摩擦が効いており、バランス次第では後退することもあります。
*4 片足では重心の真下(両足の中間点)を支えられないので、引っ込めた方の足も接地するよう傾きます。
シャフトを横に通すなど、足裏を重心を含むように内側に広げると、片足でも立てるようになります。
*5 先月の『がたごとレスキュー隊』の4脚を全て同じ向きに揃えたロボットに相当。

*6 人間のように足首を曲げられないので、斜面の角度と同じ分だけ上体が傾きます。
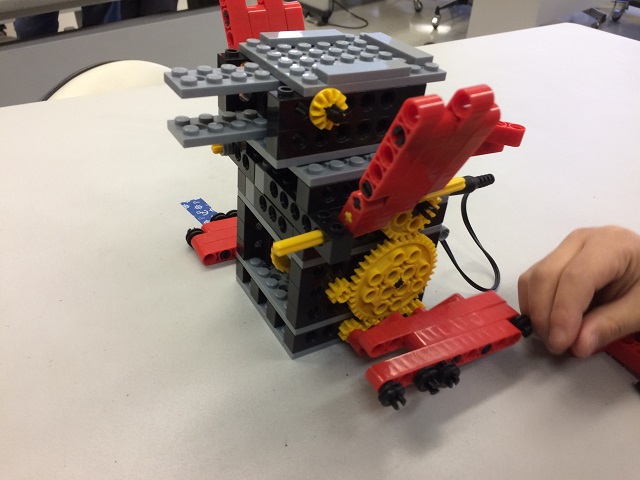
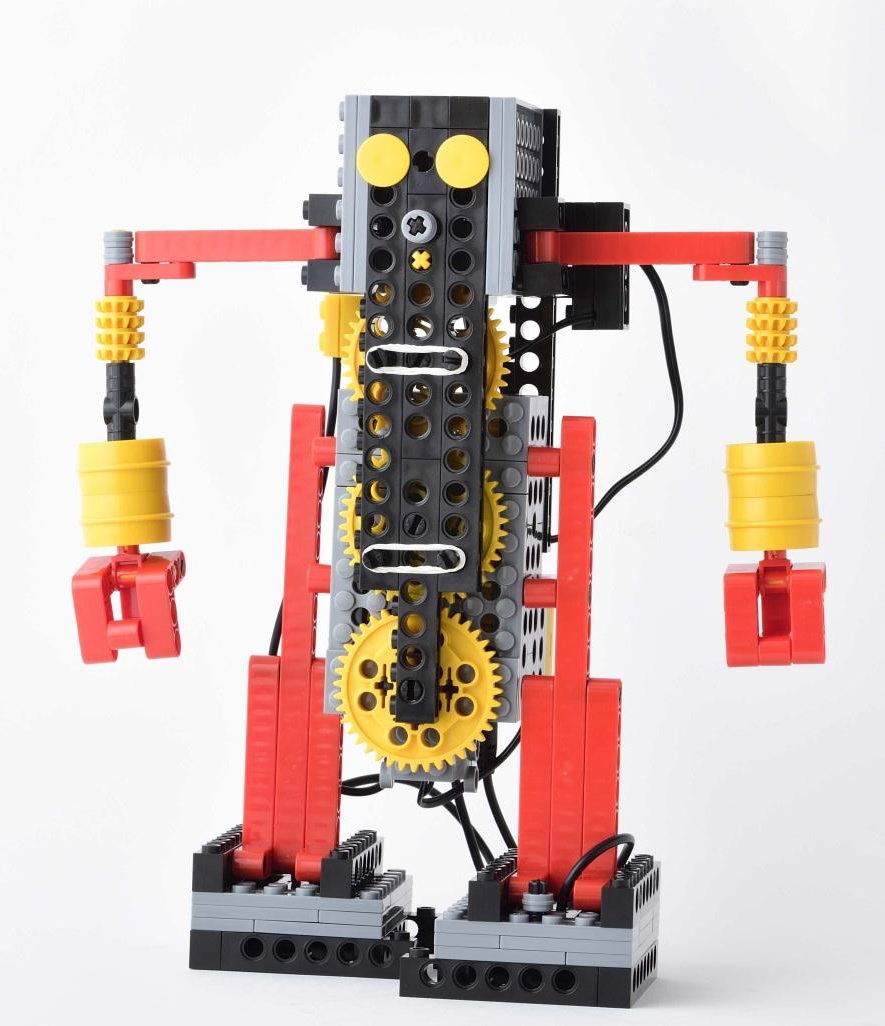
1.3 <ミドルコース『シュート君』>
当時小学2年生のアイデアコンテスト出品作がベースのキックロボットです。(マジでスゴイ…)
本作品は、モーター1個の正⇔逆回転で、下記をやってのけます。
A) 腕(うで): 振り ⇔ 振り(戻し)
B) 膝(ひざ): 伸ばし ⇔ 曲げ
C) 腿(もも): 蹴り ⇔ 引っ込め
D) 胴体 : 右ひねり ⇔ 左ひねり(戻し)
この動作を語る上で、2017年9月の『ロボアーム』を外せません。
これらの動作は、自動車ロボットのモーターとタイヤのような固定の連動関係ではなく、バイクの加速(タイヤの回転)とウイリー(前輪の浮き上がり)のような、負荷の軽い順に可動域を使い果たす関係です。
要は、「回しやすい所から回せるだけ回しちゃおう」と、モーターの力が次々と逃げ道を探すのです。
『ロボアーム』では、
E) ハンド: 掴み ⇔ 放し
F) アーム: 持ち上げ ⇔ 降ろし
G) 本体 : 右旋回 ⇔ 左旋回
の動作順が“逆再生”されなかったり、そもそも曖昧(あいまい)に同時発生したりしました。
負荷の大小関係が(重力を見方にするか敵にするかで)逆転したり、はっきり定まらなかったりする場合の現象です。
『シュート君』では、A~Dの動作がいずれも一瞬で完了するので、これらの順序(つまり負荷の大小)にあまり気を配らず、むしろ同時動作した方がキッカーとして様になると考えて設計しているのでしょう。
大事なことは、どの動作にも可動範囲(限界)を定めていることです。
そうでなければ、腕や胴体が360°回り続ける化け物になってしまいます(*1)。
いましたよね? 背中のペグを見落として、上半身だけ高速スピンする妖怪が…。


2日目の最後に、任意のパーツでボールを作って、シュートの正確さを競いました。
輪ゴムの復元力をうまく利用したレバー1本で、スライドスイッチを正逆に切り替えながらも、(可動限界があるので)入れっ放しにならないようタッチセンサーも同時に入・切するコントローラーの設計も秀逸(しゅういつ)ですね。
*1 本当は、Aの腕自体に回転限界はなく、B・C・Dの制限から決まります。
Aは、モーター(胴体)に対するモーターシャフト(背骨)の回転量だけで決まり、モーターシャフトの回転を合同で消費するB・C・Dとは異なります。
地面に対して、胴体Dと一体のモーター自身が回転するため、理解を難しくしています。
1.4 <アドバンスプログラミングコース『アルクンダーZ(2)』>
《下記を参照下さい》
http://robocobo.sakura.ne.jp/blog/robot/adv1-1801.pdf
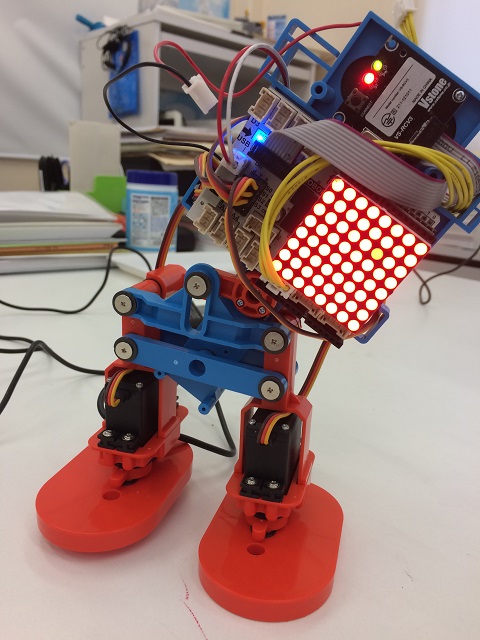
1.5 <プロ3年目コース『二足歩行ロボット(1)』>
冬タームに入り、二足歩行の制御を学びます。
ちょうど今月のベーシックコース『ウォーカータクシー』も、アドプロコース『アルクンダーZ』も二足歩行がテーマですが、
片足の浮かせ方や脚の運び方、上体の進ませ方(の組合せ)は三者三様です(*1)。
脚の運び方は、『ウォーカータクシー』と『アルクンダーZ』が同様(平行リンクにより足裏を水平に保った回転運動)ですが、本ロボットでは、左右それぞれの足首をひねる動きだけです。
片足の浮かせ方としては、『アルクンダーZ』と本ロボットが重心移動を利用する(上体を左右に傾ける)点は共通ですが、
左右の足に高低差をつけるのに『アルクンダーZ』が前述の脚の運び方によるものであるのに対し、
本ロボットでは、重心移動と同時並行して行なう、一石二鳥のリンク機構です。
加えて、片足で立って足首をひねることにより、上体を左右にひねりながら進む動きもユニークです。

以上の動きは、腰(脚の上下動と上体そらし)に1個と、両足首に1個ずつ、計3個のサーボモーターで実現しています。
それぞれを独立して動かせる無線コントローラープログラムにより、先ずは手動操縦で歩行させました。

正しい手順に則れば難なく歩けますので、同じようにサーボ駆動命令を並べることで自動歩行も実現できそうです(*2)。
次月以降、これに両腕のサーボや超音波センサー入力、音や表示出力の機能を足して、自律させていきましょう。
*1 これらに限らず、二足歩行には様々な機構・制御方式がありますが、ロボット教室のベーシックコースからプロコースまで、どの二足歩行ロボットも「静歩行」に分類されます。
簡単に言えば、かなりゆっくり歩行動作するので、いつでも安定して停止できるような姿勢を保つ(重心が着地した足裏の上空にある)方式です。
これに対し、人間や動物、ASIMOが普通に歩く時は「動歩行」と呼ばれ、静的には不安定(重心が着地した足裏の上空から外れる)ながら、動的には安定したスムーズな繰返し動作となる歩行方式で、ロボットには高度なセンシングやフィードバック制御が要求されます。
*2 手順を間違えて、一歩進んでは後ろに下がる、おろおろした動きに笑えましたね。
2. 今月の課題
<スタートアップ(全コース)>
特にありません
<プライマリーコース>
- オリジナル図面プリント
<ベーシックコース>
- オリジナル課題プリント(3面図+設問)
- 上記授業内容を精読する(概ね3年生以上/低学年は補助の下で)
<ミドルコース>
- オリジナル課題プリント(3面図+設問)
- 上記授業内容を精読する
<アドバンスプログラミングコース>
- オリジナル課題プリント(見取図+設問)
- 上記授業内容を精読する
<プロ3年目コース>
- 上記授業内容を精読する(該当テキストページを見ながら)
3. 今後の授業スケジュール
◆小倉北2/4はムーブ4F和室で開催します。
◆なかま2/10はハーモニーホール2F会議室1で開催します。
日付の()は臨時、!は原則外、?は予定の意です。
――――――――――【佐藤教室長】――――――――――
[東福間]第1・3土原則
(2017年12月~)
- 10:30~ アドプロ
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
(2018年4月~予定)
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドプロ
⇒ 2/3, 17, 3/3, 17, 4/7, 21
[東福間プロ]第2・4日原則
- 15:30~ プロ3年目
⇒ 2/11, 25, 3/11, 25, 4/8, 22
[中間]第2・4土原則<なかまハーモニーホール>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドプロ
⇒2/10 第1回 2F会議室1
2/24 第2回 3F会議室2
3/10, 24, 4/14, 28
[小倉北]第1・3日原則<ムーブ>
- 10:00~ ベーシック/プライマリ
- 13:00~ ミドル
- 15:00~ アドプロ
⇒2/ 4 第1回 4F和室
2/18 第2回 5F小セミ
3/4, 18, 4/1, 15
――――――――――【菅本教室長】――――――――――
[とばた]第2・4土原則<ウェルとばた8F>
- 13:00~ 全コース(プロを除く)
⇒ 2/10, 24, 3/10, 24, 4/14, 28
――――――――――【中野教室長】――――――――――
[八幡東]第1・3土原則<レインボープラザ4F>
- 13:30~ ベーシック
- 15:30~ ミドル
- 17:30~ アドプロ
⇒ 2/3, 17, 3/3, 17, 4/7, 21
[小倉南]第2・4日原則<総合農事センター2F>
- 10:30~ ベーシック/プライマリ
- 13:00~ ミドル /アドプロ
⇒ 2/11, 25, 3/11, 25, 4/8, 22
4. お知らせ
1) 新商品のご紹介 - 希望者は教室長までhttp://robocobo.sakura.ne.jp/blog/robot_shinshohin_chirasi_201801.pdf
【ブロック外し】
固いパーツの分離・取り外しには、時に大人の力・テクニックが要求され、指先の疲弊がやる気を削ぐシーンもあり、自力で頑張ろうとする生徒さんには気の毒でした。
この度、待望のブロック外しが開発されましたので、ぜひゲットして楽になりましょう!
数量限定につき、景品交換(宿題30ポイント/当面の販売なし)の対象とします。
【アドプロ専用タブレットケース】
ご要望の多かった専用ケースです。2月下旬以降、1,080円で販売します。
2) 12月課題 高得点者 []内は教室と学年
◆プライマリ【8名平均 図面4.0】
5点…渡邉[中間1], 長友[八幡東 年長], 柴田[小倉北2], 林田[小倉南 年長]
◆ベーシック【17名平均 図面2.2+設問2.4=4.5】
10点…なし
9点…なし
8点…宮尾[八幡東4], 森崎[八幡東2]
7点…荻山[小倉南3]
◆ミドル【19名平均 図面3.5+設問2.1=5.5】
10点…橋本[小倉南3]
9点…吉良[小倉南6], 原[小倉南4]
8点…田中[東福間5], 山本[中間5]
東福間・中間・小倉北教室 佐藤 / 八幡東・小倉南教室 中野