2.6月の課題
3.5月の解答
4.今後の授業スケジュール
5.お知らせ
1. 6月授業内容
1.0 <スタートアップ(全コース)>
割愛します。
1.1 <プライマリーコース『チャリダー』>
割愛します。





1.2 <ベーシックコース『ロボフィッシュ』>
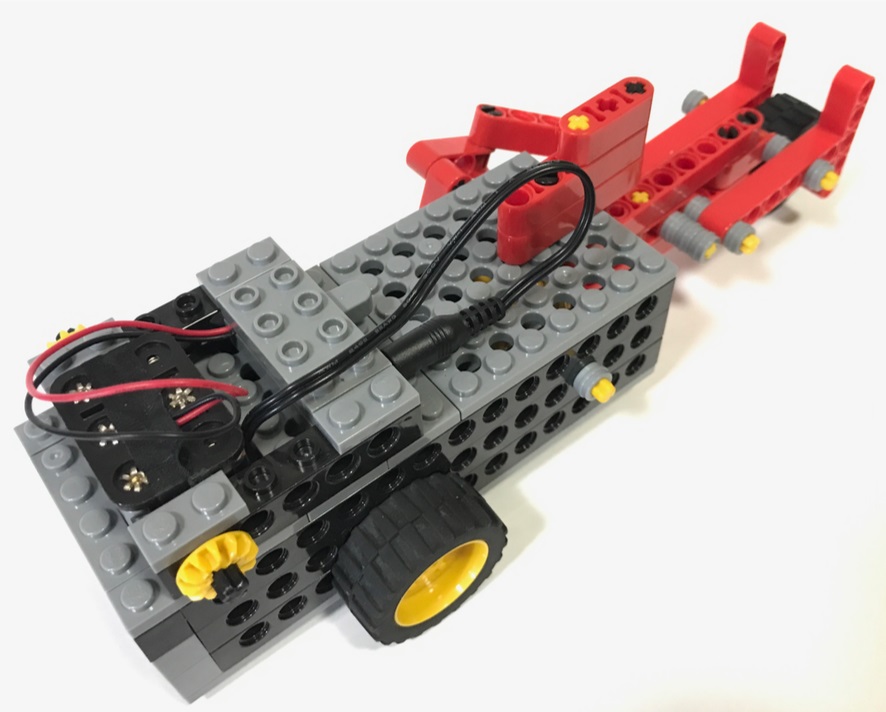
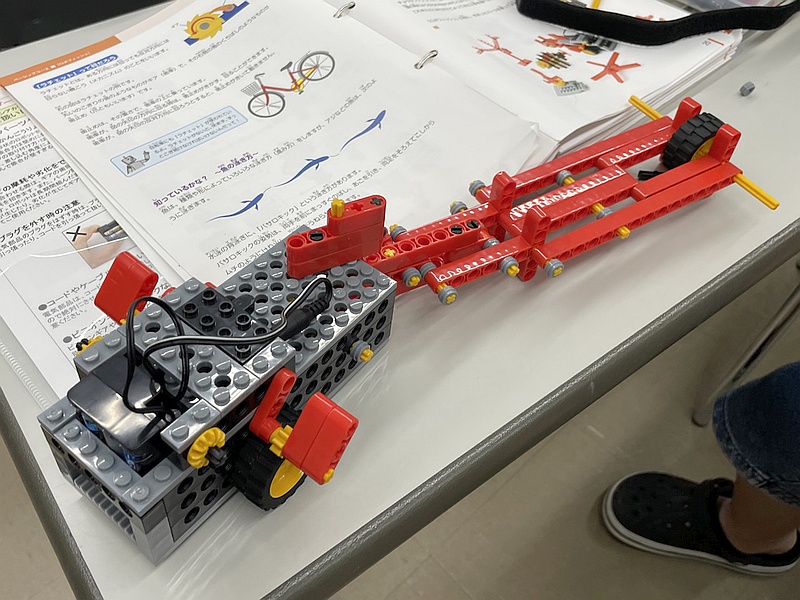
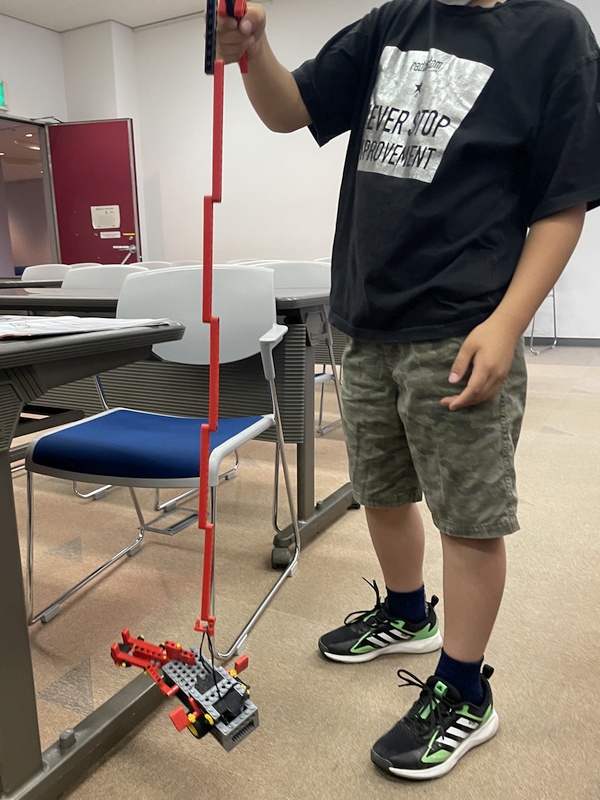
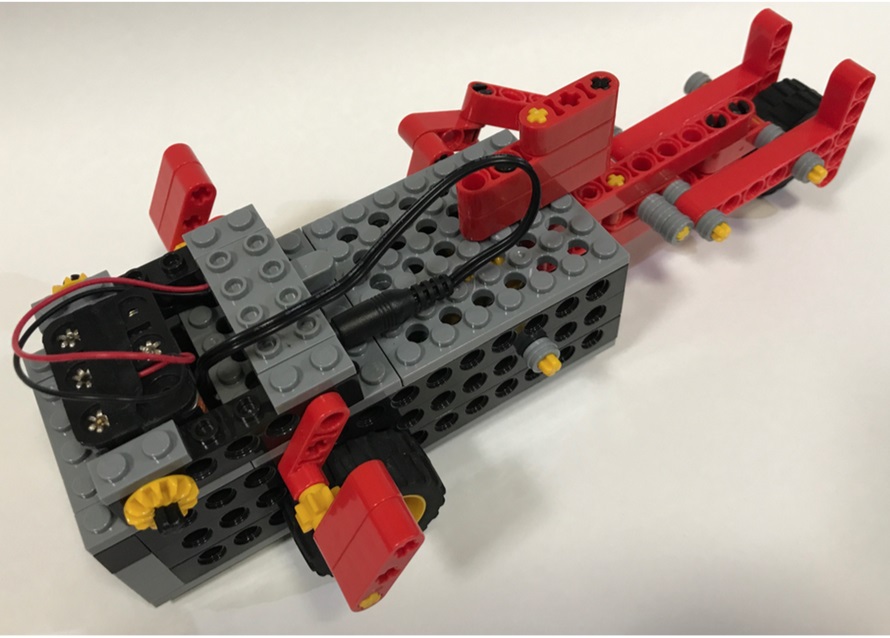 魚型ロボットです。
魚型ロボットです。1日目で製作が完了し、持ち上げてスイッチを入れると、釣(つ)った魚のように尾(お)びれを元気よく振(ふ)ります。
このロボットを床に置くと・・・前へ進みますね。当たり前でしょうか?
中には、後ろにさがるロボフィッシュもありますよ!
 試(ため)しに、タイヤSの上にある胸(むな)びれを取り外してみます。
試(ため)しに、タイヤSの上にある胸(むな)びれを取り外してみます。すると、うまく進まなくなりました。
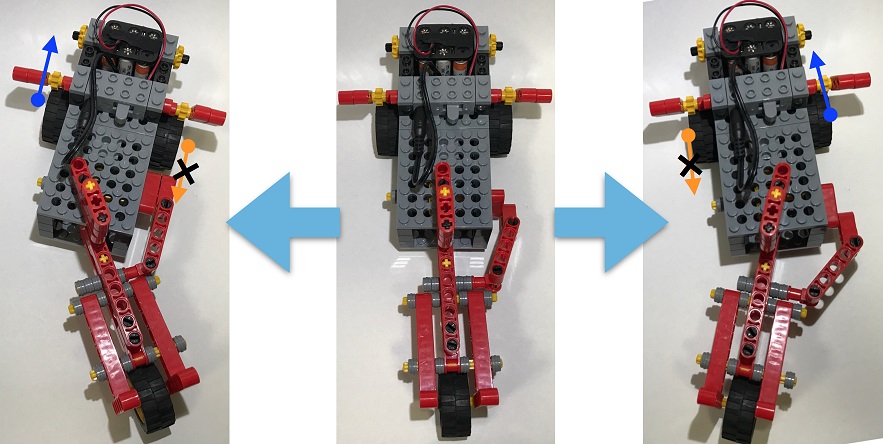
それはそうかもしれません、尾びれを左右(さゆう)に動かしているだけですから(*1)。
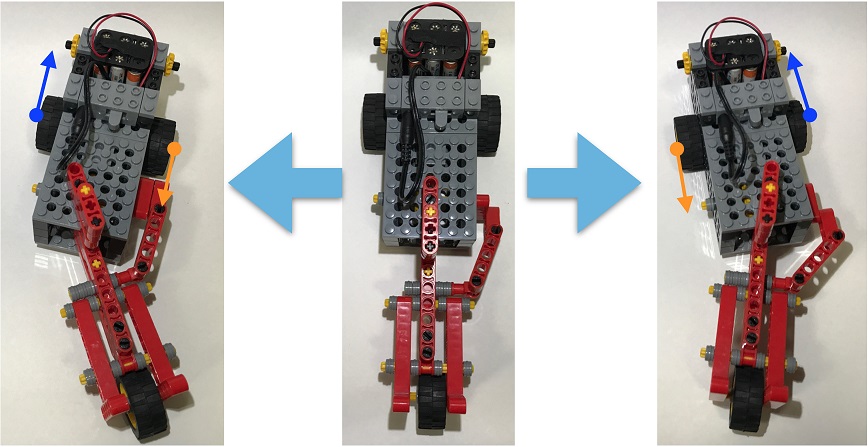 よくよく観察すると、尾びれを振る度(たび)に、左右の両輪がちょっと前に回転しては後ろにも回転して、その場で体をくねくね方向転換(ほうこうてんかん)させているだけのようです。
よくよく観察すると、尾びれを振る度(たび)に、左右の両輪がちょっと前に回転しては後ろにも回転して、その場で体をくねくね方向転換(ほうこうてんかん)させているだけのようです。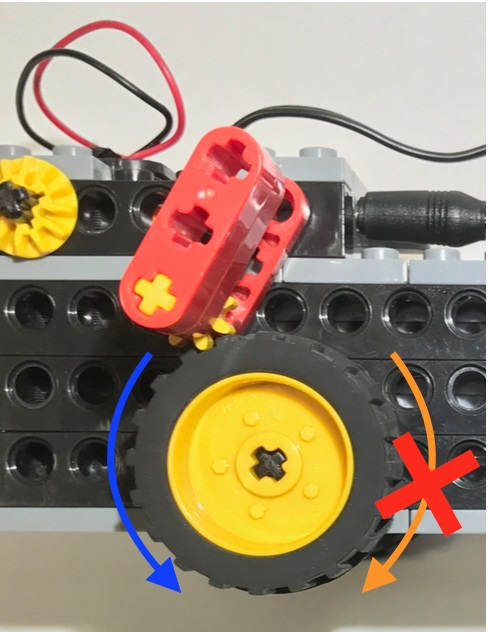 秘密は、ただの飾(かざ)りに見えた胸びれにあったのですね。
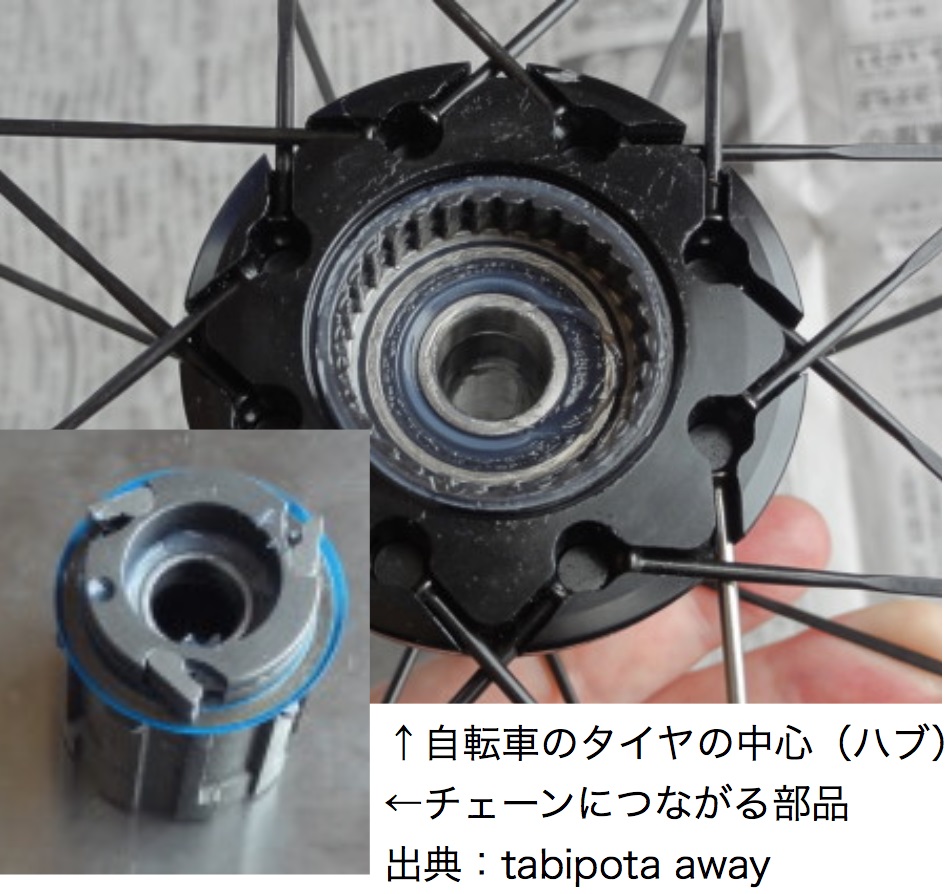
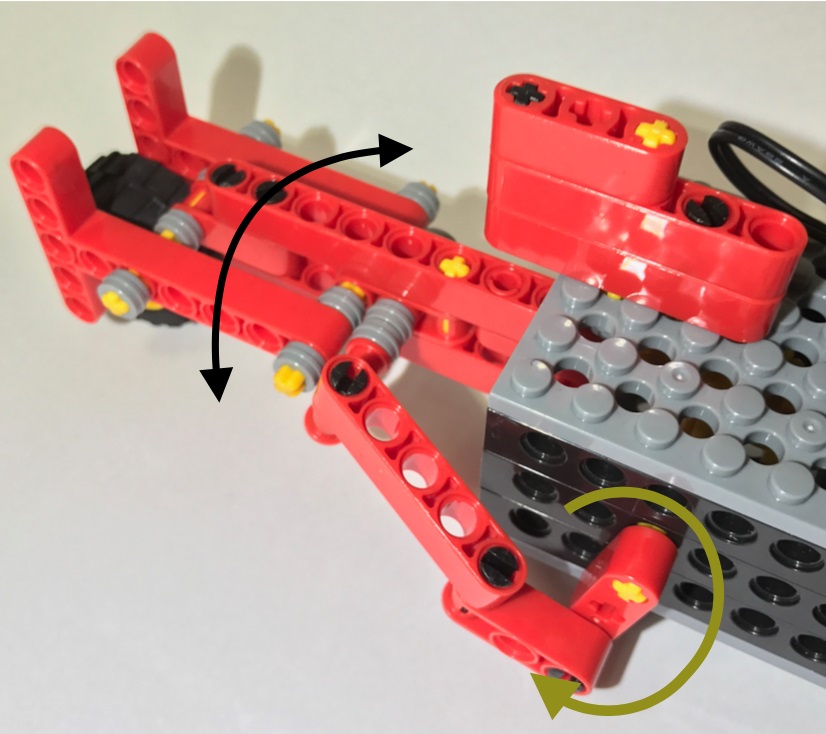
秘密は、ただの飾(かざ)りに見えた胸びれにあったのですね。この胸びれをタイヤの前方に当てると…、タイヤは前方向には軽く回転しますが、
逆方向には(胸びれのピニオンギヤとタイヤの横みぞが引っ掛かって)ロックが掛かり、後退(こうたい)を阻止(そし)することができます。
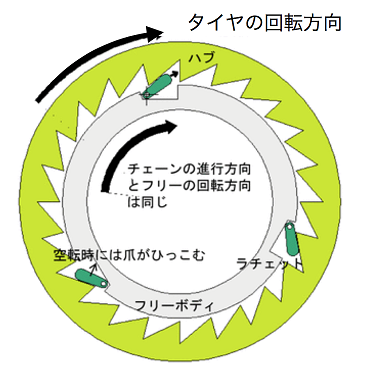
ラチェット機構といい、自転車のペダルが前方向にはしっかり漕(こ)ぐことができるものの、
走行中に漕ぐのを止めたり、逆方向に空回りさせたり(*2)することができるのも、この機構のおかげです。
これで体をくねらせる度に左右のタイヤが少しずつ交互(こうご)に前進し、全体としてスイスイ泳ぐようになりました。
坂道だって、上りますよ!
モーターを逆回転させたって、変わりません(*3)。

 なお、モーターの回転を尾びれの往復(おうふく)運動に変えるクランク(*4)という仕組みも大事なポイントですよ。
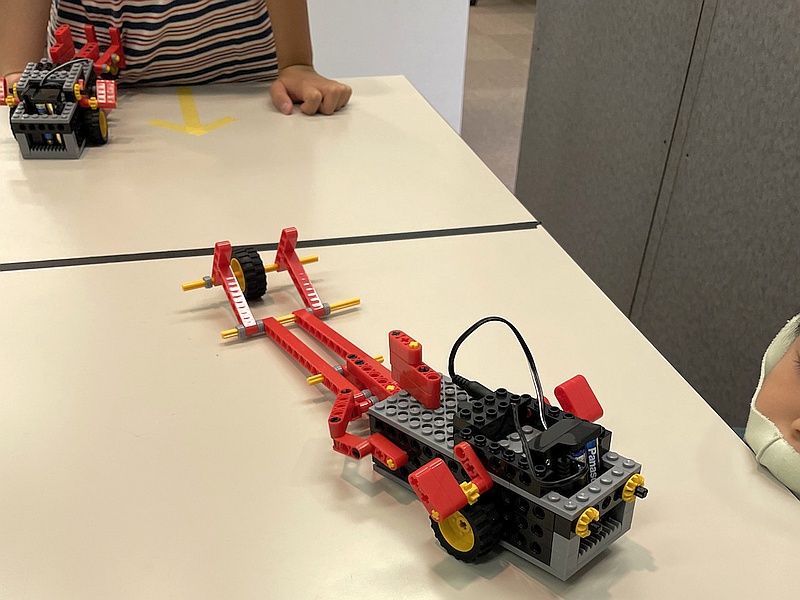
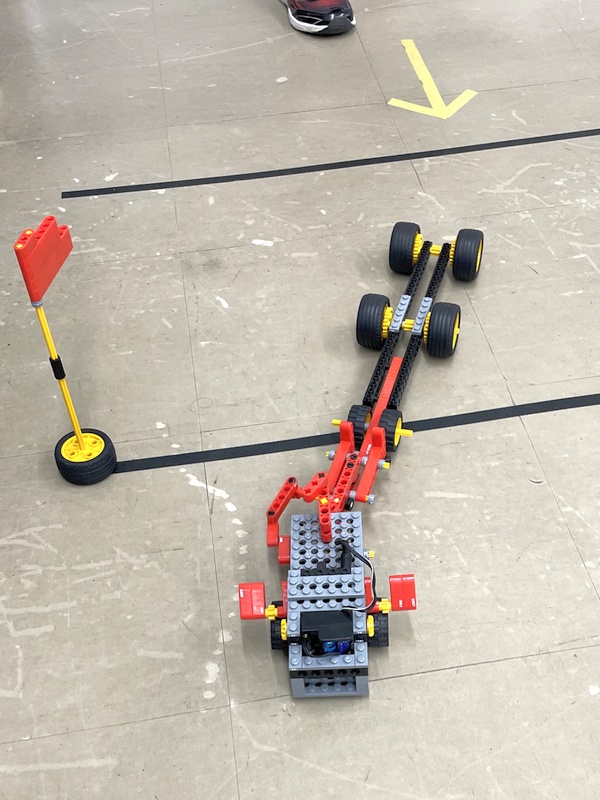
なお、モーターの回転を尾びれの往復(おうふく)運動に変えるクランク(*4)という仕組みも大事なポイントですよ。2日目最後のゲームは、例年のえさ取り競争に代(か)えて、今年は8月スペシャル地区イベント改造レース部門に則(のっと)ったコース上をまっすぐ進めるかどうかを競いました。
曲がって進んでしまう場合は、下記に注意して、左右のバランスを整えます。
●尾びれが左右に同じくらい振れること
●左右のタイヤSが軽く回ること(テキストp.6)
●左右の胸びれ(クランク)が重力だけでタイヤS上に乗るほど軽く回り、ラチェットがしっかり効(き)くこと(テキストp.11)
それでも曲がってしまう場合は、下記で直(なお)るかもしれません。
●尾びれのタイヤSが横すべりしないよう、尾びれを長くするか、重くする
●本体の片側(かたがわ)におもりを飾(かざ)り付け、左右の重心(≒タイヤSのグリップ力)バランスを変える
レース健闘(けんとう)を祈(いの)ります!
*1 水中の魚やイルカはそれで周りの水を後方へ押しやって泳げるのですが。
*2 このとき「チチチ…」と音がしますね。ラチェットの作動音です。
*3 側面のロッド3アナの回転方向は逆になりますが、尾びれを左右に振る動きは同じだからです。
代わりに、胸びれをタイヤの後方に当てると、どうしたって後退するようになります。
*4 実際に使用している部品は『クランク』ではなく『ロッド3アナ』ですが、クランクと同じ作用を働かせています。
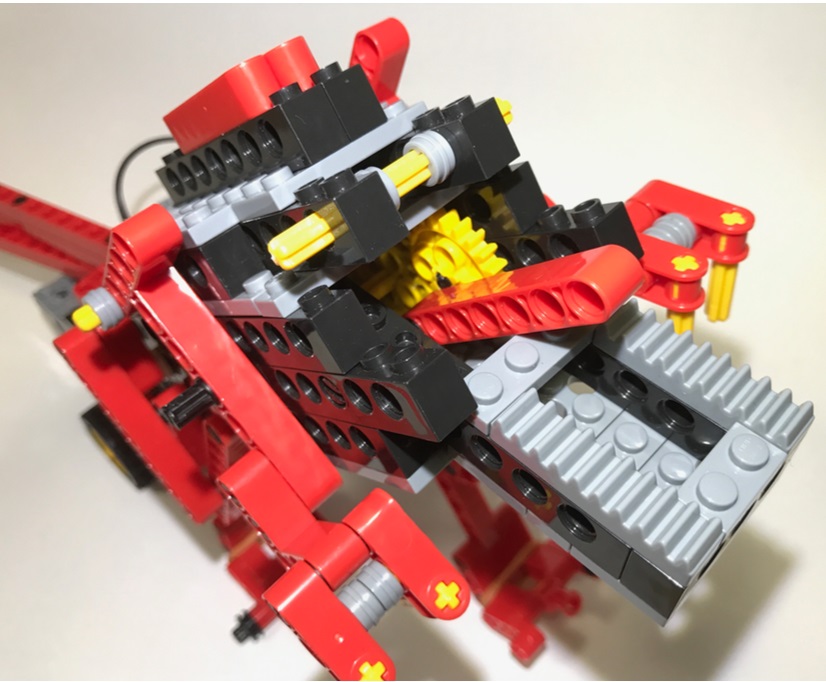
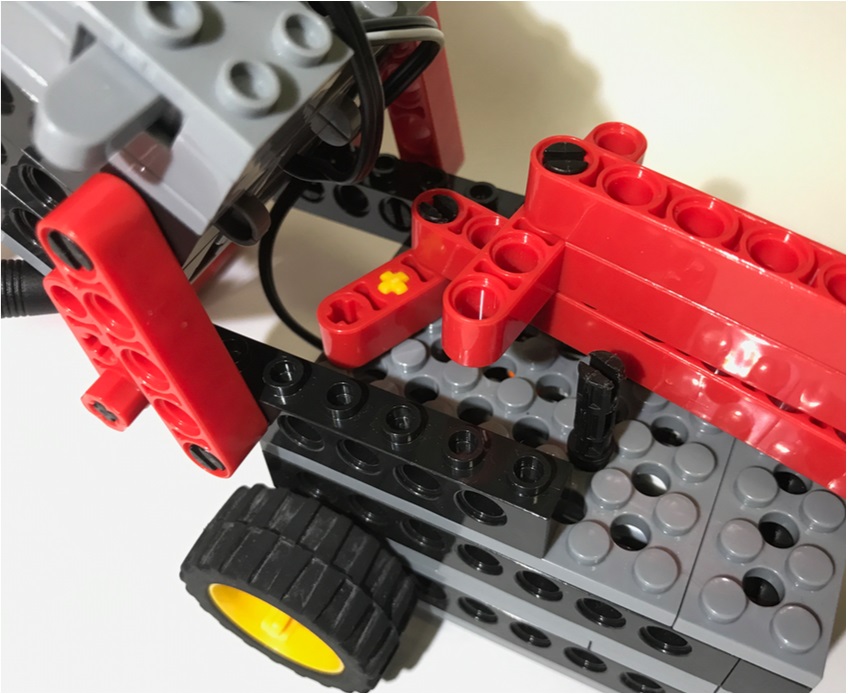
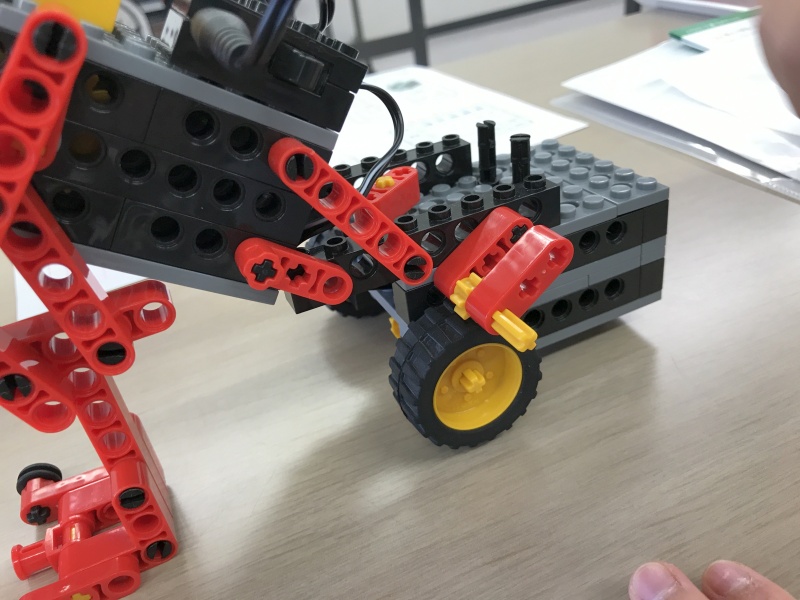
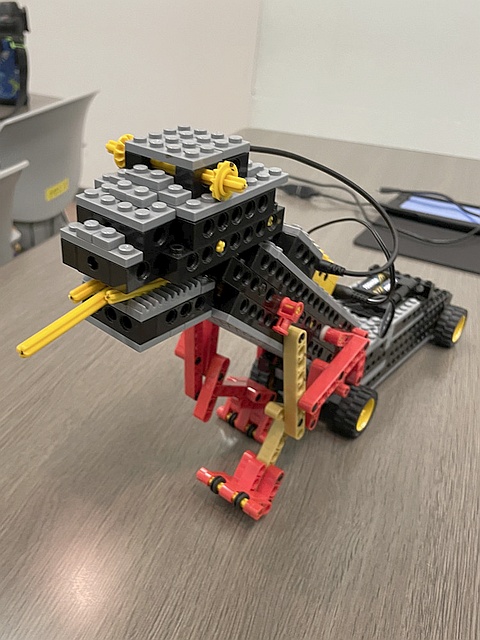
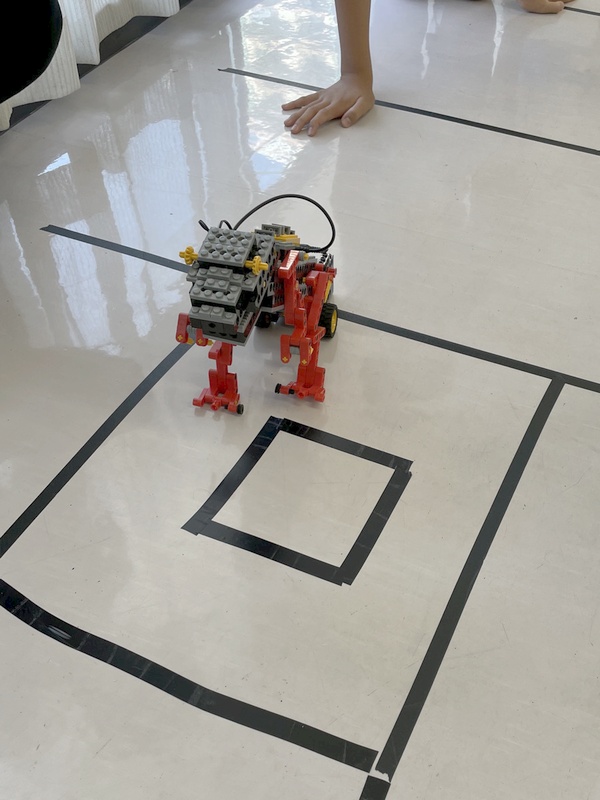
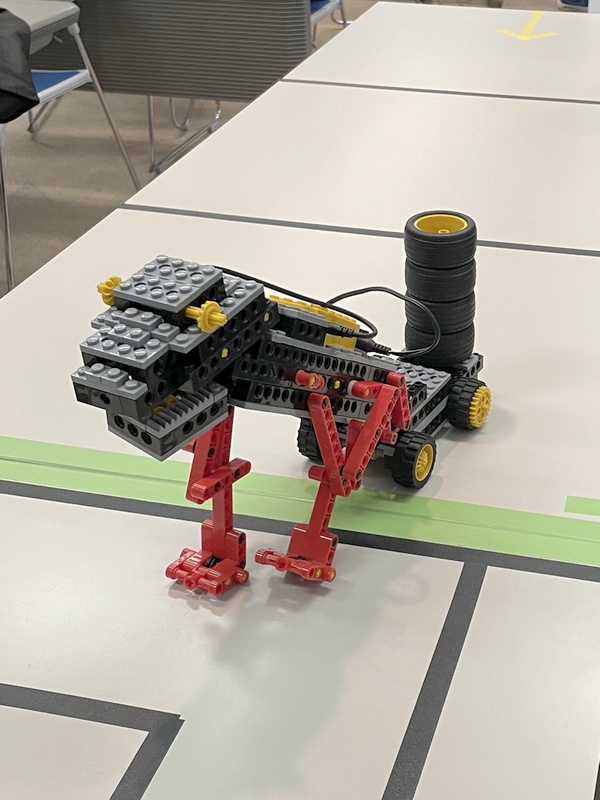
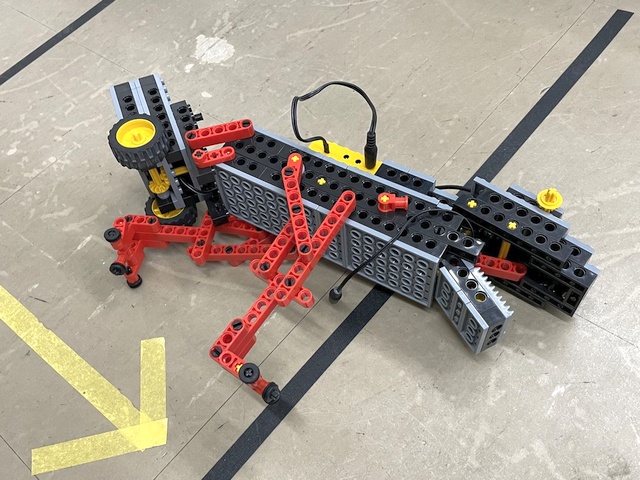
1.3 <ミドルコース『ロボザウルス』>
 恐竜型2足歩行ロボットです。ミドルコース最大級の大きさです。
恐竜型2足歩行ロボットです。ミドルコース最大級の大きさです。モーター1つで、両脚はもちろん、両手も振り、首も上下させる他、
台車のタイヤの回転を利用してしっぽまで振る凝(こ)った造りで、巨体と相(あい)まって圧巻(あっかん)です。
 両手を振る運動は、カム機構(*1)で実現しています。
両手を振る運動は、カム機構(*1)で実現しています。赤いベロを出し入れするのに連動して首を上下させたり、しっぽを振ったりするのは、クランク機構によります。
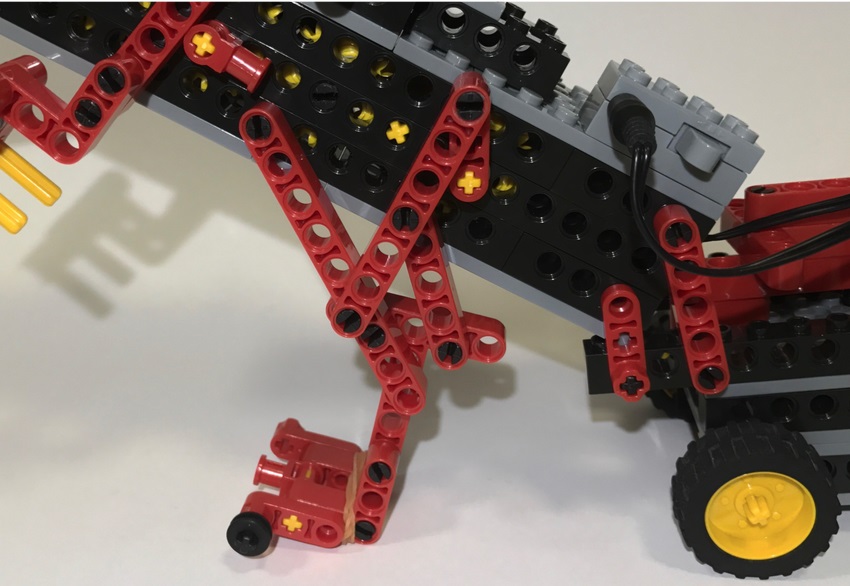 肝心(かんじん)の2足歩行は、回転するクランク(*2)の端につないだ連接ロッド(7アナ)が脚ロッドを押し引きする“てこクランク機構”という仕組みで、両脚の前後および上下への運びを見事に実現しています。
肝心(かんじん)の2足歩行は、回転するクランク(*2)の端につないだ連接ロッド(7アナ)が脚ロッドを押し引きする“てこクランク機構”という仕組みで、両脚の前後および上下への運びを見事に実現しています。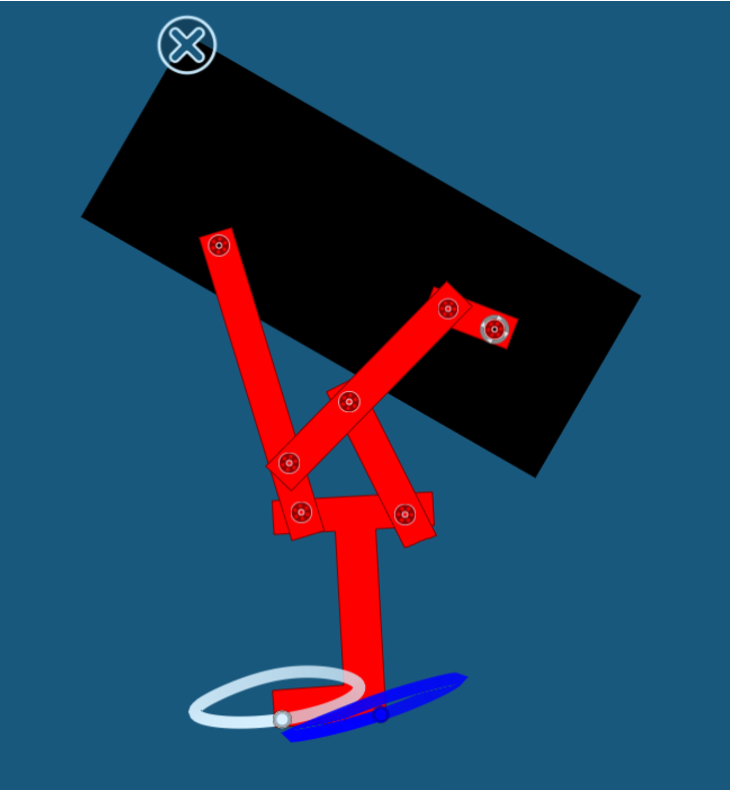 右図に足先の動く軌跡(きせき)を載せました。つま先は白線、かかとは青線で示してあります。
右図に足先の動く軌跡(きせき)を載せました。つま先は白線、かかとは青線で示してあります。一体化したパーツなのに、つま先は楕円形を描くのに対し、かかとは細い三日月形を描きます。
このように、つま先とかかとの動きが違うからこそ、地面をつま先で効果的に蹴ることができるわけです。
てこクランク機構は、先月の『ロボワン』しかり、ほとんどの動物ロボットの脚リンクに使われています。
 安定して片足を浮かせられるのは、接地した方の片足と、台車の左右両輪とで、“3点支持”が確保されているためであることも学習しました。
安定して片足を浮かせられるのは、接地した方の片足と、台車の左右両輪とで、“3点支持”が確保されているためであることも学習しました。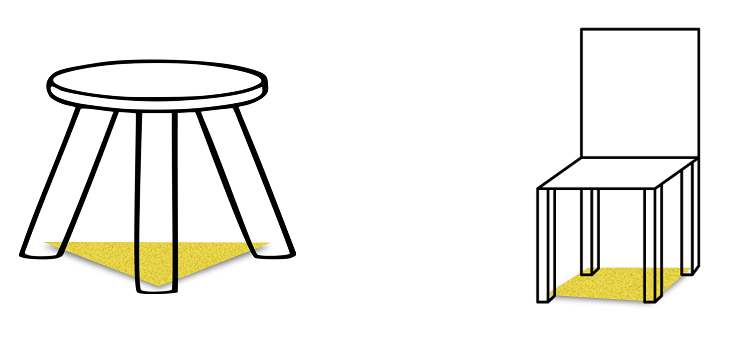 自動車やテーブル・椅子など、4点支持の製品が多いですが、実は、4脚より3脚の椅子の方がグラつかないです(*3)。
自動車やテーブル・椅子など、4点支持の製品が多いですが、実は、4脚より3脚の椅子の方がグラつかないです(*3)。椅子(の座面)をグラつかないよう固定するということは、脚の先端を、床なり地面なり、同一平面内に置くということです。
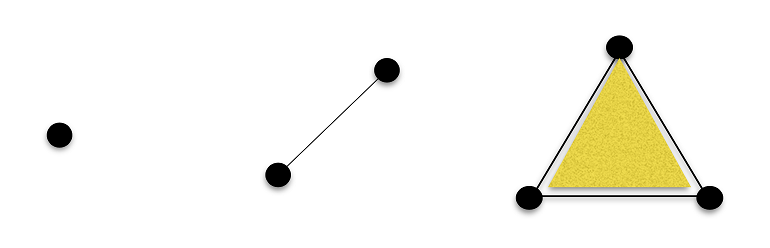 数学的な表現になりますが、我々が住む3次元空間内で任意の3点を選ぶと、その3点を通る平面は一意に決まってしまいます。
数学的な表現になりますが、我々が住む3次元空間内で任意の3点を選ぶと、その3点を通る平面は一意に決まってしまいます。3点を結ぶことで、初めて“三角形”という決まった平面が生まれます。
(ある1点や2点を通る平面なら、無限に存在しますよね)
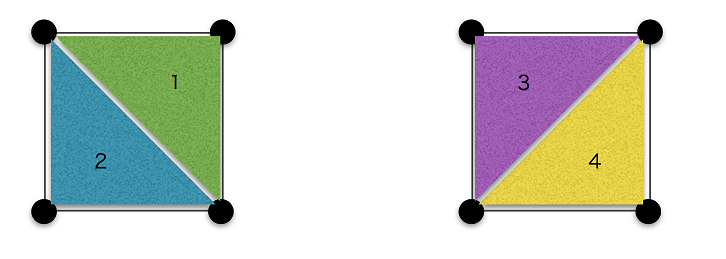 ところが、4点以上を選ぶと、全ての点が同一平面内に存在するのは奇跡(きせき)と言えるようになります。
ところが、4点以上を選ぶと、全ての点が同一平面内に存在するのは奇跡(きせき)と言えるようになります。例えば、4点の場合、図に示す通り、異なる4面が存在し得るのです。
どの色の1面を選んでも、仲間外れの1点が出てしまいます。
これが椅子のグラつき(どれか1本だけ浮いた脚)になります。
もちろん、4脚ともピッタリ同じ長さに揃(そろ)えれば(奇跡?!)、平らな床の上では固定されますが、凸凹の地面に置くと、やっぱりグラグラですね。
だから、カメラの“三脚”なんです。
さて、この恐竜で歩行レースするには・・・スピードが遅いですね。
よく見ると、後ろのタイヤが少し逆回転する瞬間があります。
ということは・・・? ラチェット機構が使えそうですね。

今月のベーシック『ロボフィッシュ』と同じように、タイヤSが前方向しか回らないようにしましょう。かなり推進効率が上がりますよ!

*1 回転体(Tジョイント)の外形に沿って他の部品(腕のTロッド)を押し動かす機械要素。
*2 実際に使用している部品は『クランク』ではなく『ロッド3アナ』ですが、クランクと同じ作用を働かせています。
*3 4点支持の製品が多いのは、倒れにくく安全だからです。
*4 動かすパーツが多かったり、重かったりして、モーターの負担(ふたん)が大きいこと。
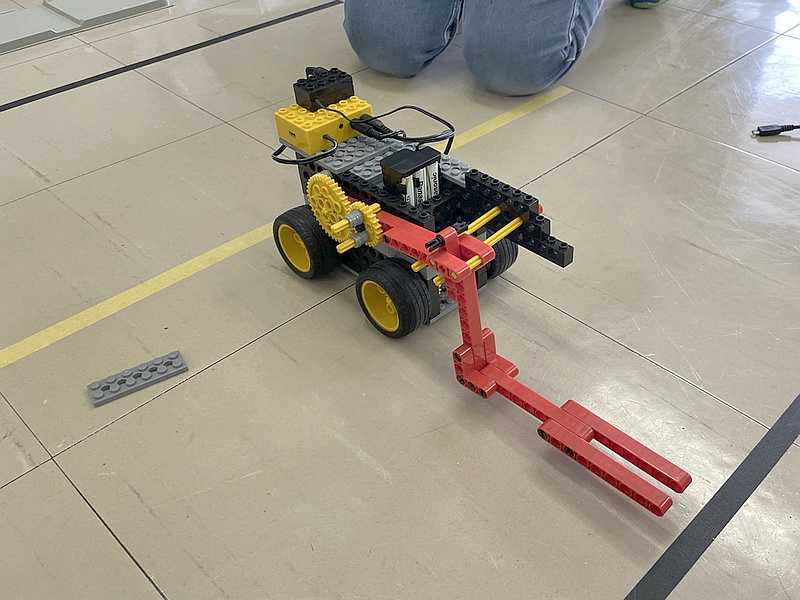
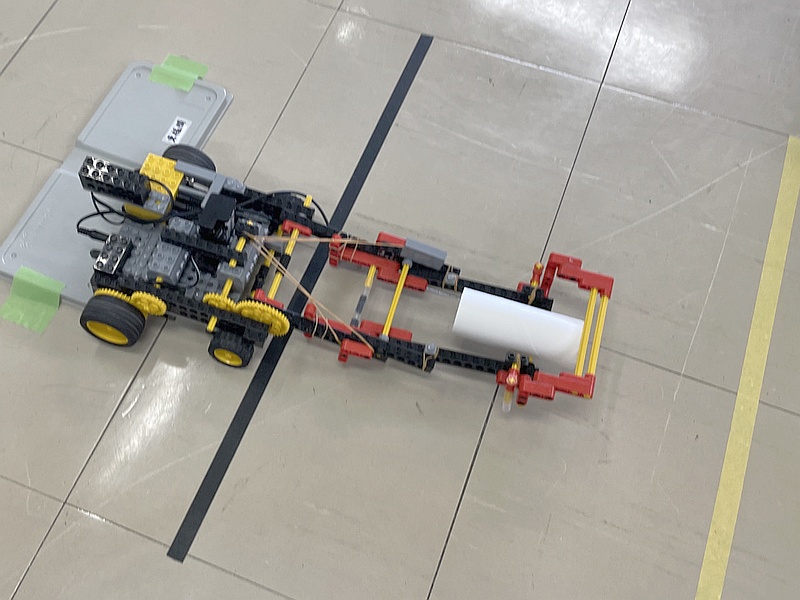
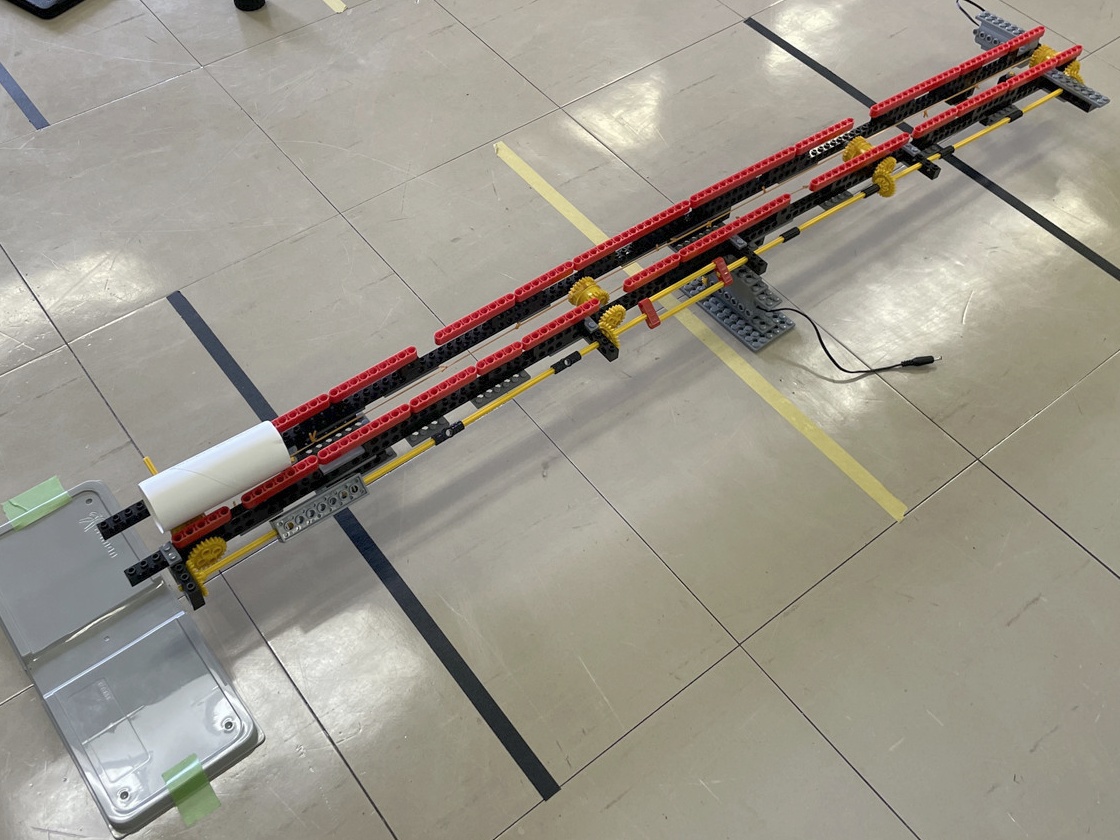
1.4 <アドバンスコース『ホイールローダー/フォークリフト①』割愛>
テクニカルコンテスト向けマシン注力の為、割愛します。
多様な方式でミッションを達成するマシンが生まれています…


1.5 <プロ1年目コース『オムニホイールロボット③』>
オムニホイールロボットの3ヶ月目、最終月です。
知的ロボットに必要な「感じて」「考えて」「動く」機能のうち、先月までは「考えて」「動く」だけでした。
いや、「考える」といっても、定めたプログラム通りに動くだけで、せいぜい次の動作に移行する秒数を計っているだけでした。
想像してみてください。いくら“脳ミソ”があっても、外界との接点が無ければ(目も耳も鼻も触覚さえも!)、意識は闇の中…。息が詰まりそうですね。
1日目では、「感じる」触覚を与えます。
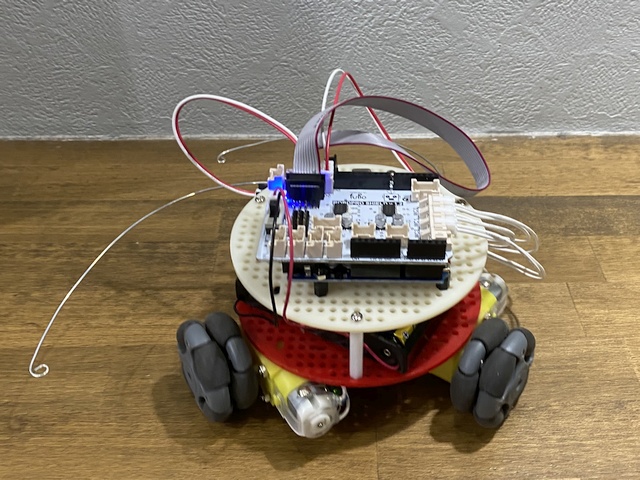 丸い本体の前部(頭部?)に左右のタッチセンサーを取り付け、そこから針金(触角?)を2本伸ばします。まるでテントウムシですね。
丸い本体の前部(頭部?)に左右のタッチセンサーを取り付け、そこから針金(触角?)を2本伸ばします。まるでテントウムシですね。針金に何かが触れると、タッチセンサーがONになって…、どうなる?
それはプログラム次第ですね。そこがマイコン制御方式の良いところです。
右の触角に触れるとちょっと後ずさり、左の触角に触れると旋回するなど、自由に設計できます。
これだけでも、ロボット掃除機を想わせる動きになります。
どうです?あのスゴイ家電の動作も、こんな感じで実現できてしまうのですよ!
自ら判断して動いてくれるので、生物のような賢さや可愛らしさが出てきます。



これを実現するプログラミング要素を学びました。
“もし、○○だったら△△して、そうでなければ××する”ような判断と行動のルールを与えるもので、“if ○○ { △△ } else { ×× }”の形式で記述します。
条件分岐といって、プログラムには大切な要素です。
これがなければ、ゲームソフトも紙芝居がせいぜいです。
 最終日の2日目は、ラジコン操縦プログラムを転送して、「考える」賢さをコントローラ操縦者に委ね、パイロン走行やサッカー対戦などで走らせ回りました。
最終日の2日目は、ラジコン操縦プログラムを転送して、「考える」賢さをコントローラ操縦者に委ね、パイロン走行やサッカー対戦などで走らせ回りました。この過程で、プログラムの条件分岐を使用して、高速走行モードに入るボタンが決められていることを悪用(?)して、パラメータを改造することもできました(*1)。
以上、3ヶ月にわたり、オムニホイールの走行原理やプログラミングの基礎を学びました。
特に、同じボタンやタッチセンサーでも、押されてどう反応するかはプログラム次第であるという点が、マイコン非接続型のスイッチ(受動素子)では出せない特徴です。


次回以降のテーマでも、マイコンに様々な判断と命令を担わせて、面白いマシンを製作して参りましょう。
*1 実際の自動車でも、ECU(Engine Control Unit)チューンと言って、そういうことが(やろうと思えば)できます。
エンジン/モーターの最大パワーは変わらないものの、アクセル操作に対する応答特性を変える走行モード切替が付いている車もあります。
1.6 <プロ2年目コース『不思議アイテムII③』>
外付けの電子回路をプログラミングで操る春タームの3ヶ月目です。
これまでの学習で、ちょっとした電子機器を製作するのに必要な要素技術は揃(そろ)ってきました。あとはアイデア次第です。
世の中の斬新な製品も、殆どは基本機能の組合せであり、その選択や按配(あんばい)こそが“応用(アプリケーション)”として大事なのです(*1)。
 入力デバイスとして、
入力デバイスとして、a) タッチセンサー
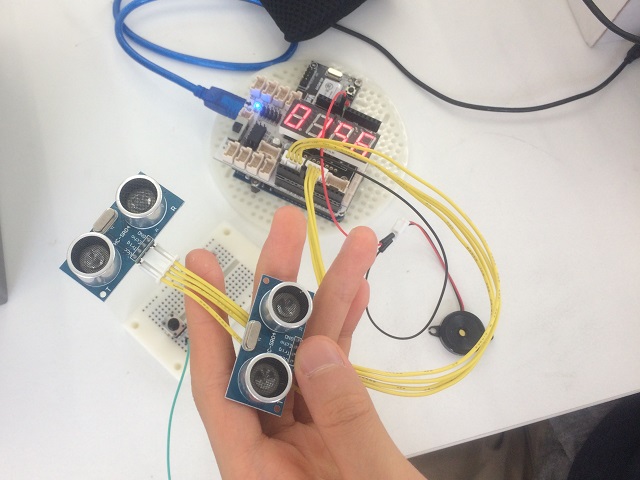
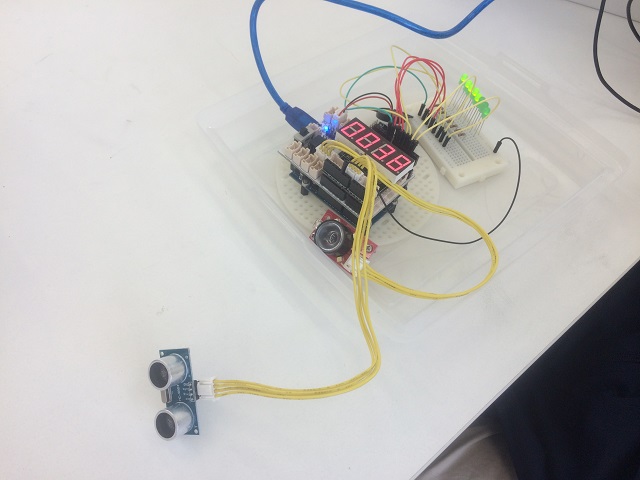
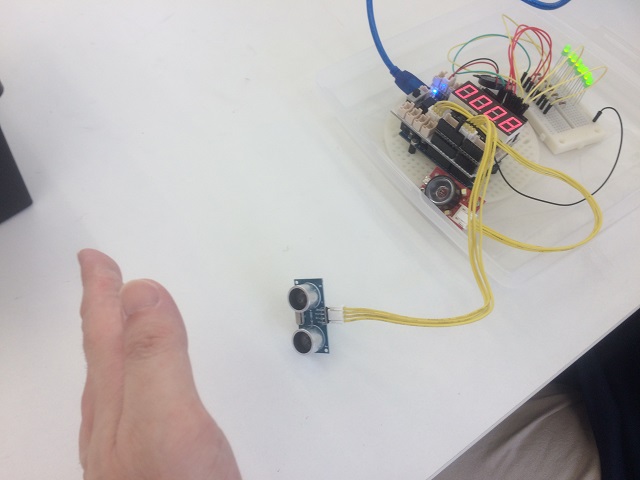
b) 超音波センサー
c) カラーセンサー
d) ボリュームセンサー(可変抵抗)
e) CdSセンサー(光依存性可変抵抗)
f) 姿勢センサー
g) タクトスイッチ
h) 無線コントローラー(ゲームパッド)
 出力デバイスとして、
出力デバイスとして、1) モーター
2) スピーカー
3) 単色LED/フルカラーLED
4) 8x8ドットマトリクスLED
5) 7セグメントLED
6) 無線コントローラーのバイブレーター
が登場し、プログラミングで扱ってきました。
これら入力‐出力の組合せに、プログラムの数を掛け合わせた分だけ、アイデアが生まれます。
例えば、今タームだけでも、
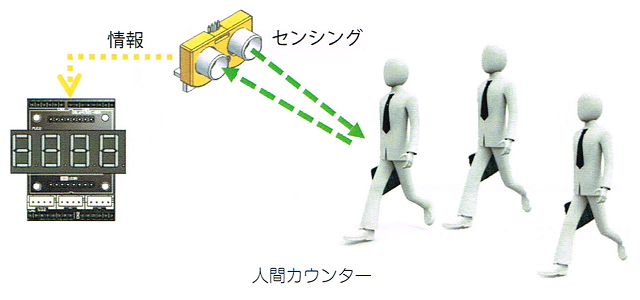
a-5) カウンター(野鳥の会・交通量調査で使われる数取器)
b-3) 障害物探知ソナー(距離をLED点灯数で表現)
b-5) 来店カウンター(客入りを数える)
b-5) 自動計測ストップウォッチ
c-2) シンセサイザー?(色を見て音で表現)(*2)
d-3) LED調光器
d-5) デジタル電圧計
e-2) シンセサイザー(周囲の明るさに応じて音の高さが変わる)
e-3) 照度計(明るさメーター)
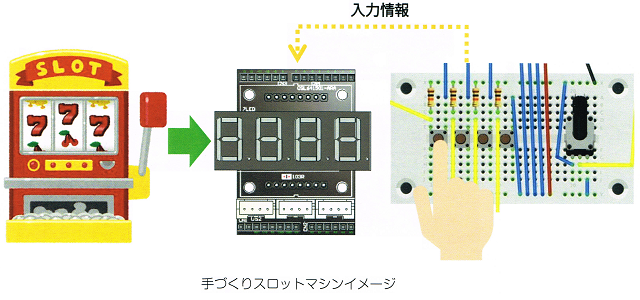
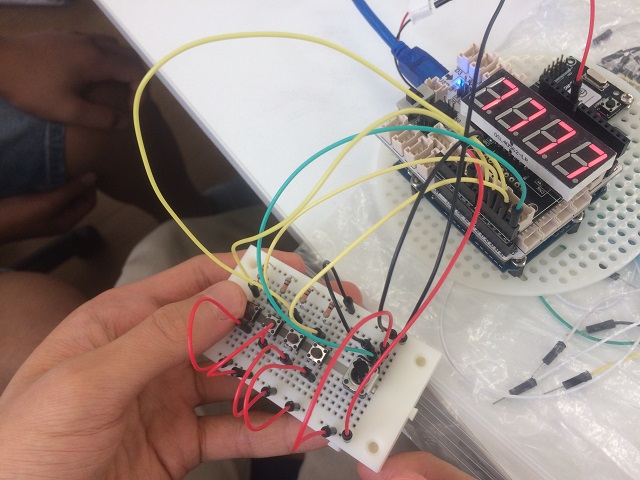
g-5) スロットマシン(ゲーム)
のようなアプリケーションに触れました。
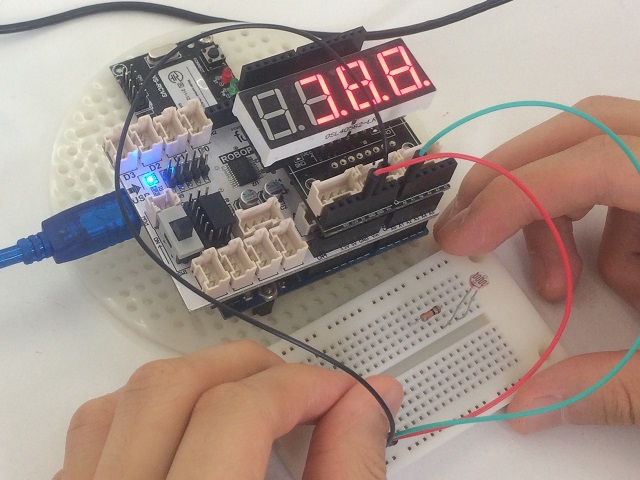
つまり、ボタンを押して決まった光や音を出すだけでなく、数値(デジタル/アナログ)で入力できる情報を1~2行の計算式で変換して、別種の物理量をもった現象として出力できるのです。
 これができるのは、人間がやりたいことを先ず言葉で表現し、手順を論理的に組み立て、プログラミング言語に書き下す能力と環境が揃っているからです。
これができるのは、人間がやりたいことを先ず言葉で表現し、手順を論理的に組み立て、プログラミング言語に書き下す能力と環境が揃っているからです。もちろん、タッチセンサーも、タクトスイッチも、超音波センサー、ボリューム、光センサー、LED、7セグ、スピーカーに、モーターも繋いで高機能なロボットを製作することだってできます。
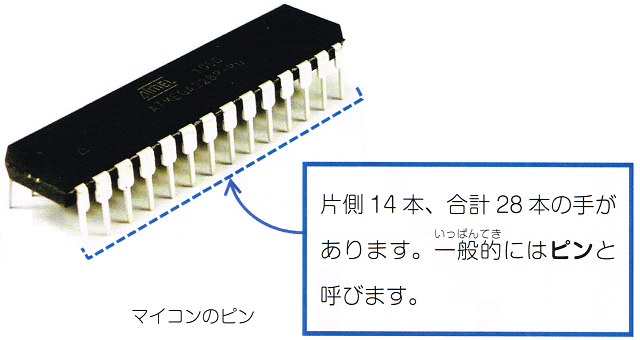 ただ、マイコンの手足(入出力ピン)の数という“物理的限界”がありますし、アナログ入出力が可能なピン数にも限りがありますから(*3)、そのような制約下で如何にうまく機能を実現させるかも、設計の範疇(はんちゅう)です。
ただ、マイコンの手足(入出力ピン)の数という“物理的限界”がありますし、アナログ入出力が可能なピン数にも限りがありますから(*3)、そのような制約下で如何にうまく機能を実現させるかも、設計の範疇(はんちゅう)です。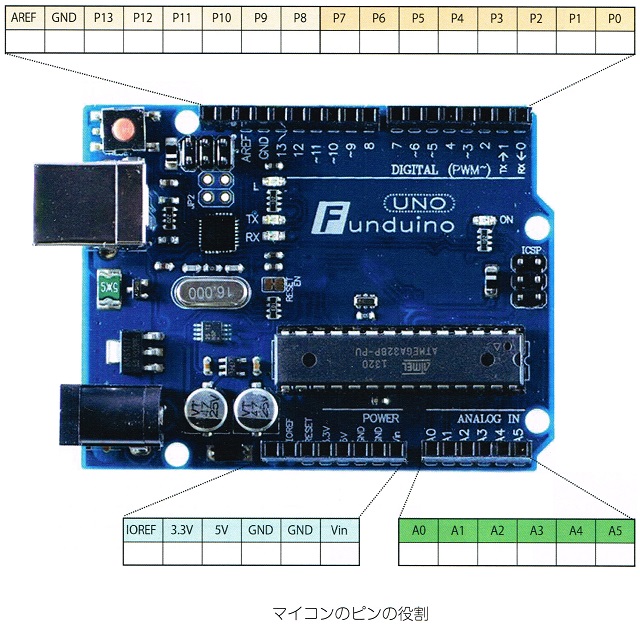 扱うマイコンや開発環境によって違いがありますので、一般的には、仕様書を読み解きながら、必要なデバイスとピン接続を選定し、プログラミングで機能を統合させることもエンジニアの営みです。
扱うマイコンや開発環境によって違いがありますので、一般的には、仕様書を読み解きながら、必要なデバイスとピン接続を選定し、プログラミングで機能を統合させることもエンジニアの営みです。とても総合力が強化される(頭が良くなる)場面ですので、自らの設計で、電子機器やロボットの製作を早めに経験して、趣味にして欲しいと思います(*4)。
 ここで、カウンター(計数)プログラムのテクニックをおさらいしておきます。
ここで、カウンター(計数)プログラムのテクニックをおさらいしておきます。b-5) 来店カウンターにおいて、高速に繰り返すループ関数(メインルーチン)の中で「検出した距離が短かったら、カウントアップ」という論理だけをコーディングすると、客がセンサーの近くにいる間めまぐるしくカウントアップしてしまいます。
「短い距離を検出してカウントアップしたら、長い距離を検出するまで何もしないで待つ」ことで、一人ずつ数えられるようになりますね。
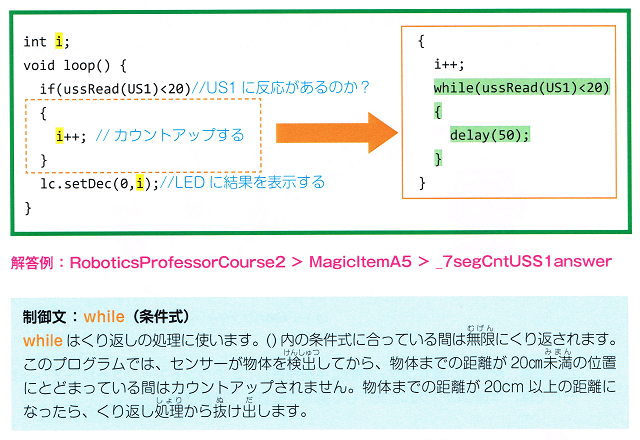 そのために、while文を使います。
そのために、while文を使います。while文は、繰返し機能をもったif文のごとく、条件式が成立する間だけ中身を繰り返します。
繰返し命令文にはfor文もありましたが、for文は、決まった回数だけ繰り返す使い方が主であるのに対し、while文は、繰返し回数が不定であるような条件下でよく使われます(*5)。
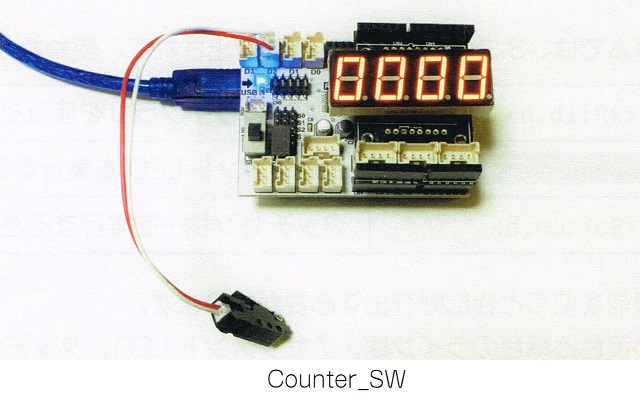 なお、a-5) 手押しカウンターの場合も、loop(){ } の中で、
なお、a-5) 手押しカウンターの場合も、loop(){ } の中で、if( digitalRead(D2) == HIGH ) { // D2接続スイッチが押されたら
count++; // カウントアップ
}
と書くと、スイッチを押している間中カウントアップしてしまいますが、
#include <Button.h> // スイッチ(Button)ライブラリ読込み
Button SW = Button(D2, HIGH); // D2接続スイッチにSWと命名するおまじない
SW.listen(); // 押下状態を問合せ
if( SW.onPress() ) { // もし押されてたら
count++; // カウントアップ
}
のように onPress() を使えば、一度スイッチを離さないと次のカウントアップがされなくなりますので、便利です(*6)。
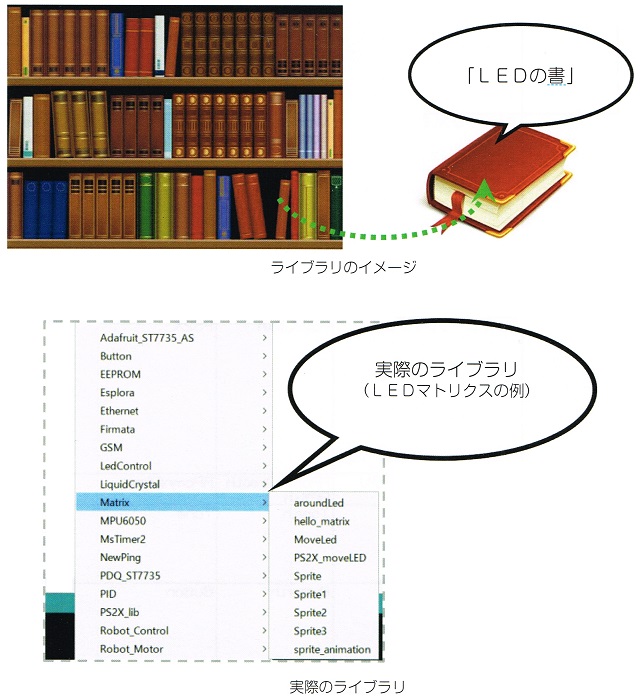 このような誰かが用意してくれた便利な関数は、“ライブラリ”という仕組みから呼び出し、準備するためのおまじないを唱えて、大いに利用させてもらいましょう。
このような誰かが用意してくれた便利な関数は、“ライブラリ”という仕組みから呼び出し、準備するためのおまじないを唱えて、大いに利用させてもらいましょう。次月からの夏タームは、お待ちかね、サーボモーター式アームロボットの製作です。
*1 電化製品のことを英語で electrical appliances(電気的な応用物)というくらいです。
*2 色相(色味情報)だけを抽出し、色相環でいう角度 0~359°を音の周波数として再生しました。
*3 アナログ入力にはA/D変換器、アナログ出力にはPWM波形生成器という特別な内部回路が必要ですので、全てのピンに機能を持たせることはしません。
*4 仕事や趣味で電子機器やロボットを扱うと、理科(電子回路)、数学、国語・英語(仕様書・説明書)、プログラミング的思考力などが複合して問われます。
そして、技術の日進月歩により、自然に毎日が勉強です。楽しくなりますよ!
*5 while(条件式) は for( ; 条件式; ) と等価ですので、for文の方が高機能であり、while文+α(初期化+後処理) の機能をもちます。
*6 代わりに isPressed() を使えば、digitalRead(D2)==HIGH と同じように、スイッチを押している間中カウントアップすることもできます。
1.7 <プロ3年目コース『不思議アイテムIII-1③』>
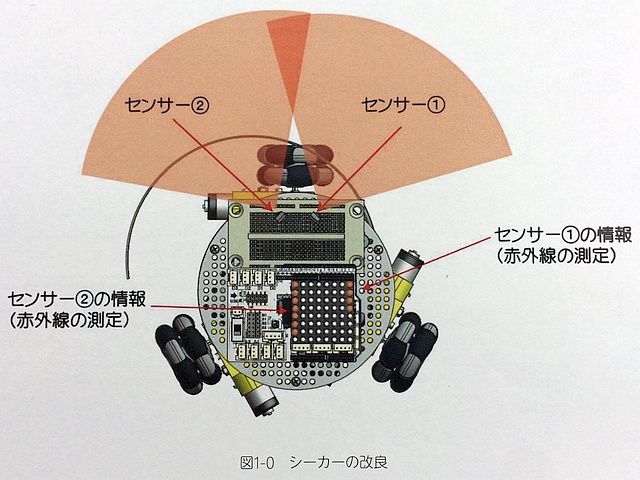 第5回の内容では、赤外線追従ロボットへ改造しました。
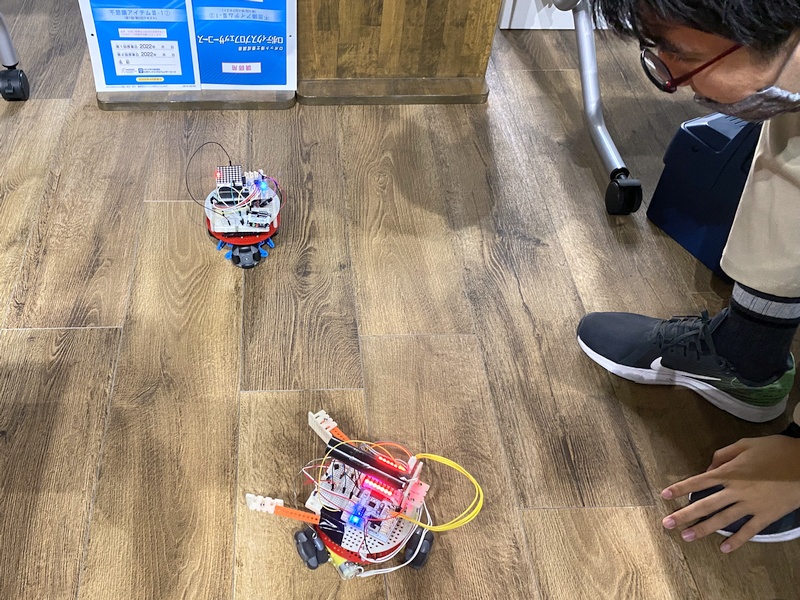
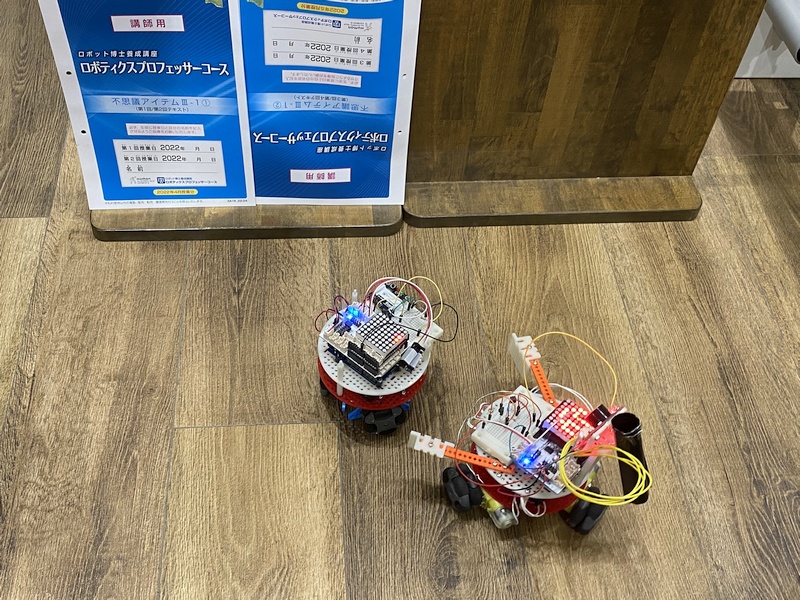
第5回の内容では、赤外線追従ロボットへ改造しました。姿勢センサーは外しましたが、赤外線受光素子を左右斜め前方に2個取り付け、その受光レベルの強弱で(*1)、ボール代わりの赤外線ビーコンマシン(モーター無し空回りオムニホイールベース)に向かって走ります。
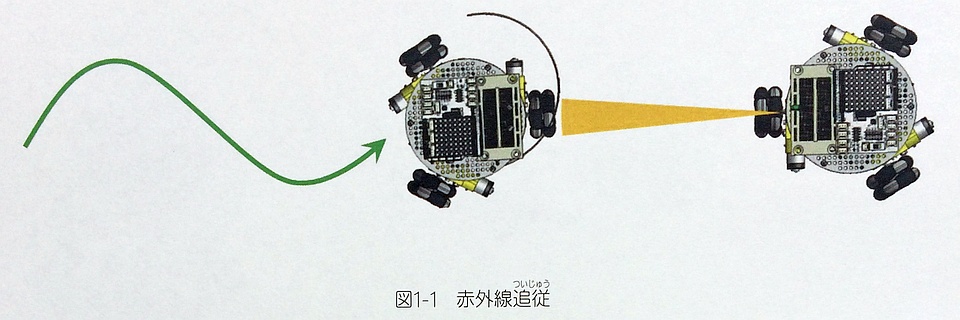 ボールマシンに接触したしたことを前部に取り付けたタッチセンサー(+針金)で検知して、一旦止まります。
ボールマシンに接触したしたことを前部に取り付けたタッチセンサー(+針金)で検知して、一旦止まります。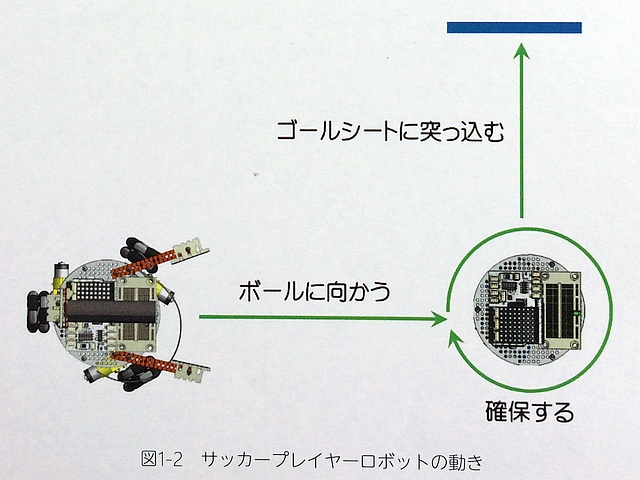 さらに第6回の内容で、サッカー(1人プレイヤー)ロボットへ発展させました。
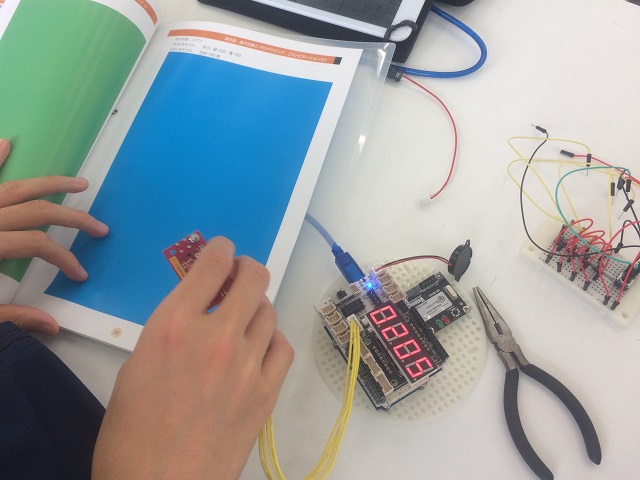
さらに第6回の内容で、サッカー(1人プレイヤー)ロボットへ発展させました。両アームの間にボールマシンを抱えたまま、カラーセンサー(+覗き円筒)でゴール代わりの青い紙面を見つけるまで旋回し、ドリブルシュートするプレイです。
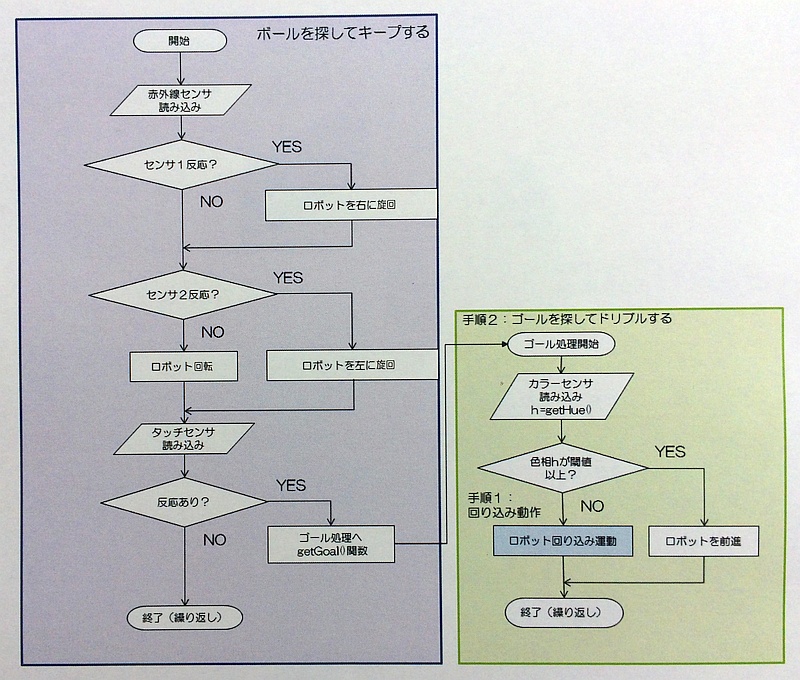 高度な制御に見えますが、赤外線やカラーセンサーの機能(デバイス+ライブラリ)を利用した恩恵が大きいのであって、フローチャートやプログラム[RobotSoccer]を見ても理解し易いように、さほど複雑なアルゴリズムではありません。
高度な制御に見えますが、赤外線やカラーセンサーの機能(デバイス+ライブラリ)を利用した恩恵が大きいのであって、フローチャートやプログラム[RobotSoccer]を見ても理解し易いように、さほど複雑なアルゴリズムではありません。プログラムの難しさは、意外な所にあったりします。
授業の最後に、サッカー個人プレイ(1人ドリブルシュート)の性能を試します。
室内の照明の具合にもよりますが、周囲の景色に誤反応しにくいよう付けた覗き円筒が仇(あだ)となり、
ボール(赤外線ビーコンマシン)探索のために旋回中、遠方にゴール(青い紙面)を認識して一瞬止まろうとするも、回転の慣性で通過してしまうことが殆どでした(*2)。
●覗き円筒を短めにカット
●ゴール近くからプレイ開始
することにより、3種のセンサー(赤外線⇒タッチ⇒カラー)を駆使したインテリジェントロボットを堪能することができました。
そのスマートな動作たるや、思わず顔がにんまりしてしまうほどでした。
*1 強弱の2値(1ビット)だとしても、左右で2ビット4通りの情報が得られますから、左曲がり・右曲がり・直進・旋回(ビーコン探索)のような動作へ割り振れます。
*2 青を一瞬でも認識したら、ゆっくり逆旋回しながら「じっくり探し直す」ようなプログラム上の工夫も考えられます。
2. 6月の課題
<スタートアップ(全コース)>
特にありません
<プライマリーコース>
- オリジナル図形プリント
http://robocobo.sakura.ne.jp/blog/HW/RobotP2206-Q.pdf
<ベーシックコース>
- 上記授業内容を精読する(概ね3年生以上/低学年は補助の下で)
- オリジナル課題プリント(3面図+設問)
http://robocobo.sakura.ne.jp/blog/HW/RobotB2206-Q.pdf
<ミドルコース>
- 上記授業内容を精読する
- オリジナル課題プリント(3面図+設問)
http://robocobo.sakura.ne.jp/blog/HW/RobotM2206-Q.pdf
<アドバンスコース>
⇒テクニカルコンテスト向けマシン注力の為、割愛します
<プロ1年目コース>
- 上記授業内容を精読する(該当テキストページを見ながら)
<プロ2年目コース>
- 上記授業内容を精読する(該当テキストページを見ながら)
≪下記いずれか(後者ほどハイレベル)≫
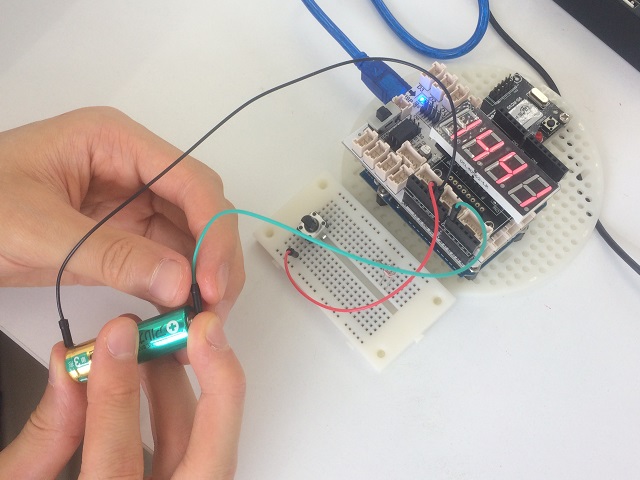
- プログラム[USS_8LED]をベースに、接近するほどLEDが多く点灯し、警告音がけたたましくなる障害物検知アラームをプログラミングする
(3種以上の警告音を自分でデザインし、鳴らし分けること)
- スロットマシン[_7segSlot5]をベースに、機能や効果音の演出を増やし、完成度を上げる
《例》
“777”以外のゾロ目でも当たり音を出す
“77*”等でリーチ音を出す
停止ボタン押下後、数字遷移が段々遅くなるように止まる【ハイレベル】
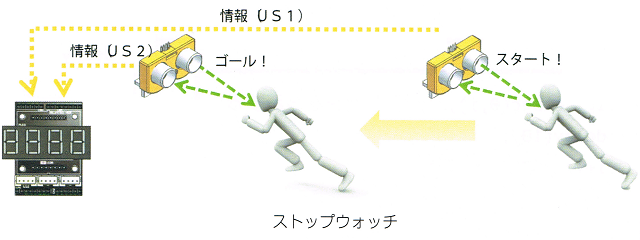
- 【1年目ハイレベル再挑戦】スポーツタイマー[_7segCntUSS2_4]または1年目1月泥棒アラーム[USSApp1]をベースに、入退室判定(鳴り分け)チャイムに改造する
《ヒント》
US1→US2の順に検知したのか、US2→US1の順に検知したのかを判定する為に、
適当なフラグ変数を宣言 int flag; し、以前に検知した番号を記憶しておく。
検知順に応じてメロディを変える。(メロディ演奏方法は[_7segSlot5]または[ToneTest]を参考)
チャイムを鳴らした後はクリア flag=0; しておく。
<プロ3年目コース>
- 上記授業内容を精読する(該当テキストページを見ながら)
3. 5月の解答
<プライマリーコース>
http://robocobo.sakura.ne.jp/blog/HW/RobotP2205-A.pdf
<ベーシックコース>
http://robocobo.sakura.ne.jp/blog/HW/RobotB2205-A.pdf
<ミドルコース>
http://robocobo.sakura.ne.jp/blog/HW/RobotM2205-A.pdf
<アドバンスコース>
http://robocobo.sakura.ne.jp/blog/HW/RobotA2204-A.pdf
4. 今後の授業スケジュール
◆小倉北7/3は【真鶴会館】小倉北区真鶴1-5-15で開催します。
◆全教室8月第1回目を一週ずつ前シフト(盆休み)します。
――――――――――【佐藤教室長】――――――――――
[東福間]第1・3土原則<学習ルームでこぼこ>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドバンス
⇒ 7/2, 16, 7/30※, 8/20, 9/3, 17
※8/6→7/30シフトします
[東福間プロ]第2・4日原則<学習ルームでこぼこ>
- 10:00~ プロ1年目
- 13:00~ プロ2年目
- 16:00~ プロ3年目
⇒ 7/10, 24, 8/7※, 28, 9/11, 25
※8/14→8/7シフトします
[中間]第2・4土原則<なかまハーモニーホール>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドバンス/プロ1・2年目
⇒7/ 9 第1回 3F会議室2
7/23 第2回 3F会議室2
8/6※, 27, 9/10, 24
※8/13→8/6シフトします
[小倉北]第1・3日原則<ムーブ>
- 10:30~ ベーシック/プライマリ
- 13:00~ ミドル/プロ1年目
- 14:00~ プロ2年目
- 15:00~ アドバンス
⇒7/ 3※第1回 北九州総合労働会館【真鶴会館】4F 第7会議室
7/17 第2回 ムーブ4F茶室・工芸室
7/31※, 8/21, 9/4, 18
※7/3はムーブフェスタ全館使用につき【真鶴会館】で開催します
※8/7→7/31シフトします
――――――――――【中野教室長】――――――――――
[八幡東]第1・3土原則<レインボープラザ4F>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドバンス
⇒ 7/2, 16, 7/30※, 8/20, 9/3, 17
※8/6→7/30シフトします
[小倉南]第2・4日原則<総合農事センター2F>
- 10:30~ ベーシック/プライマリ
- 13:00~ ミドル
- 15:00~ アドバンス
⇒ 7/10, 24, 8/7※, 28, 9/11, 25
※8/14→8/7シフトします
5. お知らせ
1) 第12回ロボット教室 全国大会 8/27(土) 東京大学 安田講堂[再掲]2年ぶりに東大で開催されます。案内冊子(紙面)はありませんので、PDFをお目通し下さい。
http://robocobo.sakura.ne.jp/blog/convention/RobotConv2022.pdf
◆アイデアコンテスト (全コース) :予選応募Web申込み 画像・プレゼン動画
◆テクニカルコンテスト(アドバンス):予選応募Web申込み 動画(2分以内)
《全国大会 エントリー 6/13(月)12:00~7/4(月)17:00》
《全国大会 観覧申込み 6/13(月)12:00~定員まで》
http://kids.athuman.com/robo/event/convention/2022/
2) スペシャル地区イベント 8/12(金) 福岡市科学館サイエンスホール[再掲]
全国大会に先立ち、地区イベントも開催されます。(全国大会の予選ではありません)
今年はベーシック/ミドルコース向けに改造レース部門が新設されます。
発表はちょっと…という人はこちらにエントリーするのも面白いかも!?
◆アイデア発表会(全コース) :抽選応募Web申込み ロボット画像
◆改造レース部門(ベーシック/ミドル):抽選応募Web申込み
《地区イベント エントリー 6/13(月)12:00~7/4(月)17:00》
《地区イベント 観覧申込み 6/13(月)12:00~定員まで》
http://kids.athuman.com/robo/event/convention/2022/
3) 5教室合同テクニカルコンテスト研究会[追加開催]
エントリーマシンを開発するアドバンス生向けに、下記の教室時間を開放します。
最終調整に利用下さい。
・7/2(土) 八幡東レインボープラザ4F 17:30-21:00
- 参加には事前連絡ください
- アドバンス授業時間外での入退室時間は自由です
- エントリー者の振替手数料は頂きません
- ほぼ目途の立ったマシンの最終調整・プログラミングをアドバイスする機会であり、時間内での完成を支援するものではありません
- 動画の撮影等、応募に向けた作業は手伝いません
- 東福間7/2(土)・小倉北7/3(日)では7月テキストのロボットに進み、テクニカルコンテストから離れますので、各自ご判断で参加or振替下さい
4) 地区イベント/全国大会レース競技の概要[差替え掲載]
コンテストへの出品・発表は、創作力や理解力など、ロボットの総合力を一気に高めるチャンスです。
ご家族行事として参加下さい。
地区イベントでは、ベーシック/ミドル生向け改造レース部門も新設されます。
「オリジナルロボは難しいけど、大会には参加してみたい!」
そんな人は改造レース部門へエントリーしてみましょう。
(コース詳細は非公開な為、練習コースは用意しておりませんが、素材情報が出ました)
≪各レースの概要≫
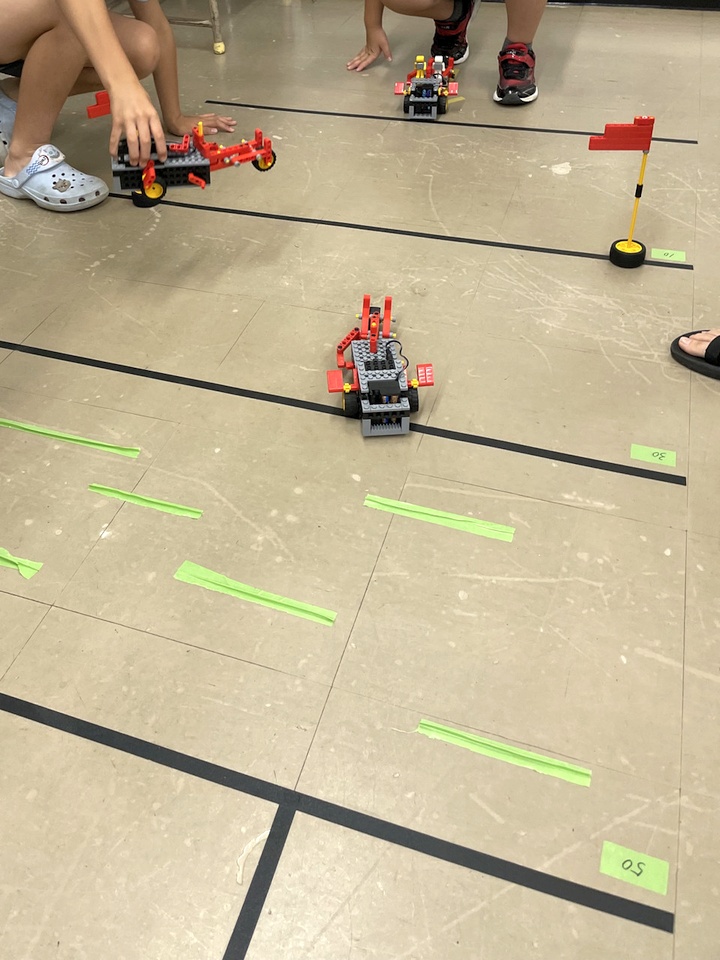
◆地区イベント/改造レース部門(ベーシック)『ゴールを目指せ!ロボフィッシュ』
6月ロボット「ロボフィッシュ」で1.5m先のゴールエリアを目指します。
途中には障害物と凸凹床があり、進めなくなったり、コースアウトしないよう工夫します。
《コース素材情報》
https://kids.athuman.com/robo/event/convention/2022/pdf/remodeling_course.pdf
◆地区イベント/改造レース部門(ミドル)『ピタッと止まれ!ロボザウルス』
6月ロボット「ロボザウルス」で1m先のゴールエリアに自動停止(プログラミング)します。
途中には障害物と凸凹床があり、進めなくなったり、コースアウトしないよう工夫します。
《コース素材情報》
https://kids.athuman.com/robo/event/convention/2022/pdf/remodeling_course.pdf
◆全国大会/テクニカルコンテスト(アドバンス)『運んで立てろ!ロケット発射台』
保管エリアに寝かせたロケット(トイレットペーパーの芯)を約1m先の発射台(パーツケースの蓋)に運んで立てる競技です。
1分の制限時間内に立てたロケットの本数を競います。
(トイレットペーパの芯を3,4本ご用意ください)
《応募見本動画》
https://www.youtube.com/watch?v=7qpMh6GbsXg
5) 小倉南教室 会場変更の予告[再掲]
8月~2月上旬(予定)まで農事センター2Fが耐震工事の為、利用できなくなります。
そこで、下記の通り開催場所・施設を変更させて頂きたく、
ご不便をおかけいたしますが、何卒ご協力お願いいたします。
時間帯に変更はありません。
8月 7日・28日 農事センター1F A区画(エレベータホール目の前)
9月11日・25日 山田緑地 映像室
10月 9日・23日 山田緑地 映像室
11月13日・27日 山田緑地 映像室
12月以降は未定
9,10,11月は【農事センター】→【山田緑地】へ変更になります。
北九州市立 山田緑地
〒803-0865 小倉北区山田町
有料駐車場あり(300円/日)
6) 5月課題 高得点者 []内は教室と学年
◆プライマリ【7名平均 図形4.0】
5点…亀平[八幡東1], 山根[八幡東1], 木村[小倉北 年長]
◆ベーシック【20名平均 図面3.2+設問1.8=5.0】
10点…なし
9点…なし
8点…眞所[八幡東3]
7点…有松[小倉南3], 矢野[小倉南3]
◆ミドル【16名平均 図面3.5+設問2.1=5.6】
10点…なし
9点…藤津[中間6], 柴田(直)[小倉北5]
8点…古賀[八幡東6], 小牧[小倉南6]
◆アドバンス【5名平均 図面6.4+設問1.8=8.2】
17点…林田[小倉南5]
東福間・中間・小倉北教室 佐藤 / 八幡東・小倉南教室 中野