2.6月の課題
3.5月の解答
4.今後の授業スケジュール
5.お知らせ
6.コロナ問題の理解 その3
1. 6月授業内容
1.0 <スタートアップ(全コース)>
割愛します。
1.1 <プライマリーコース『チャリダー』>
割愛します。





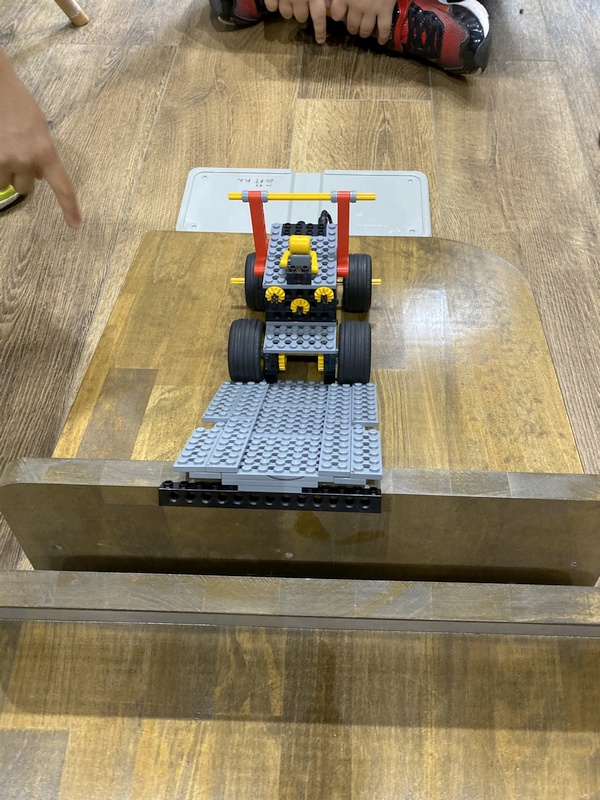
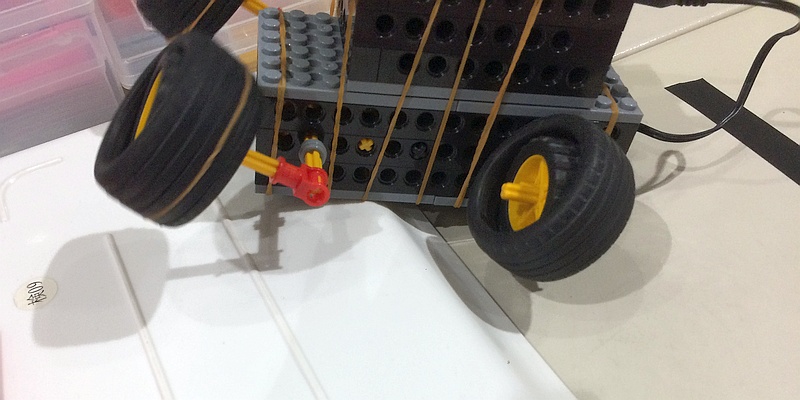
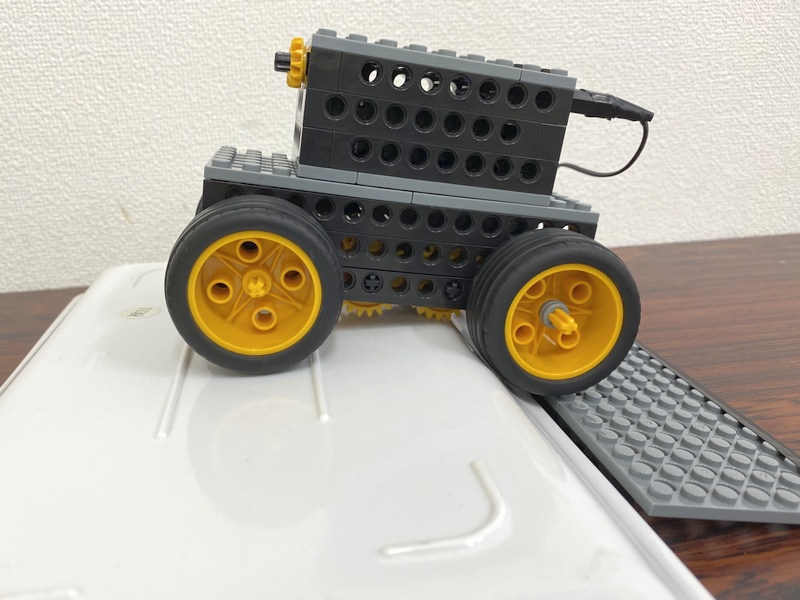
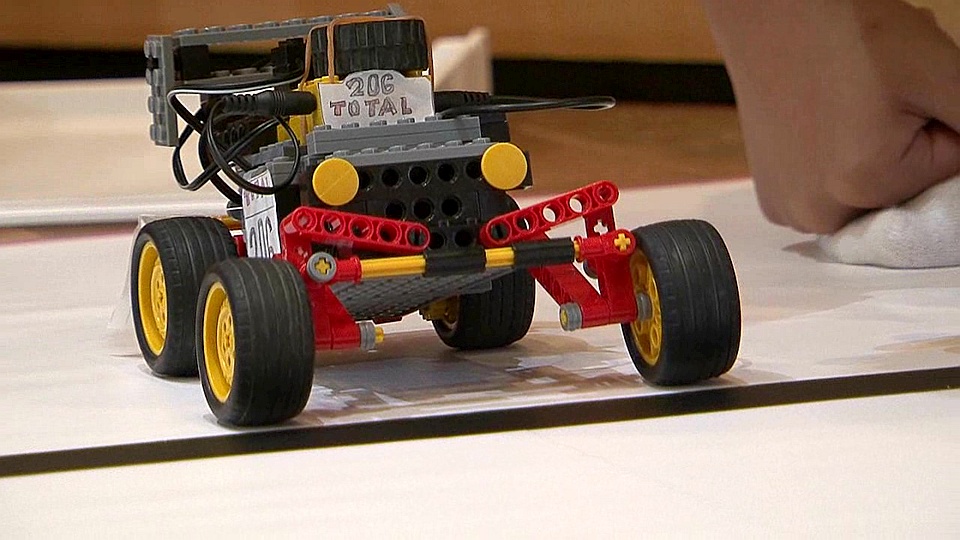
1.2 <ベーシックコース『がたごとレスキュー隊』>
救助ロボットです。
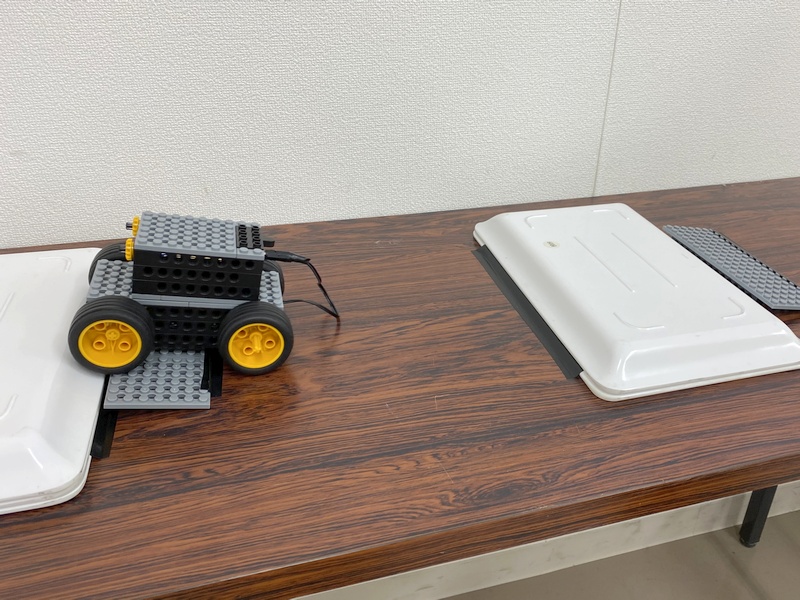
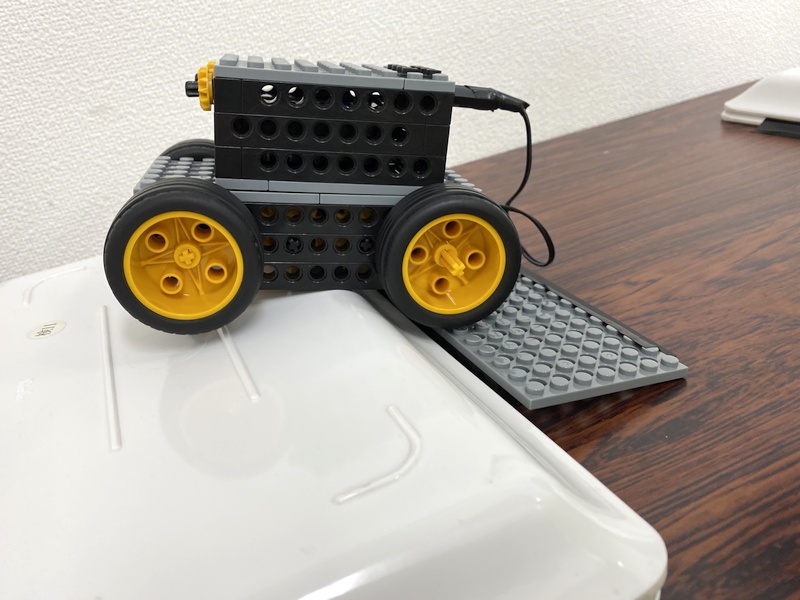
 1日目では、何の変哲(へんてつ)もなさそうな4輪車に留(とど)まりましたが、車体底面の地上高(自動車用語でロードクリアランス)が低いため、少しの段差で引っ掛かってしまい、がたごと道はとても無理のようですね。
1日目では、何の変哲(へんてつ)もなさそうな4輪車に留(とど)まりましたが、車体底面の地上高(自動車用語でロードクリアランス)が低いため、少しの段差で引っ掛かってしまい、がたごと道はとても無理のようですね。それでも、ちょっとした工夫があるのです。それはスピードが“遅(おそ)い”ことです。
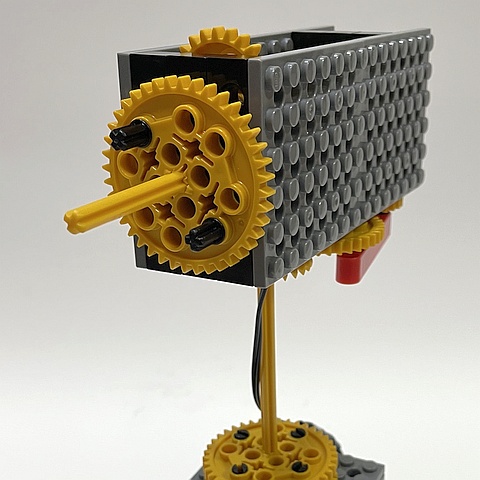
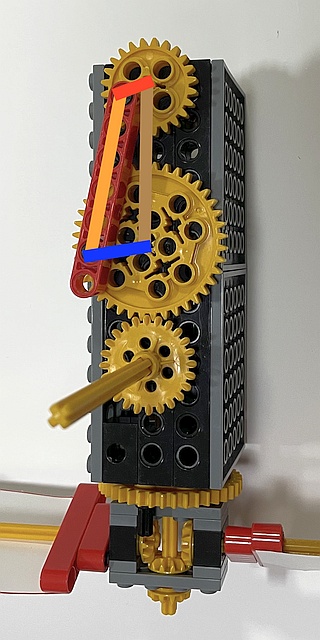
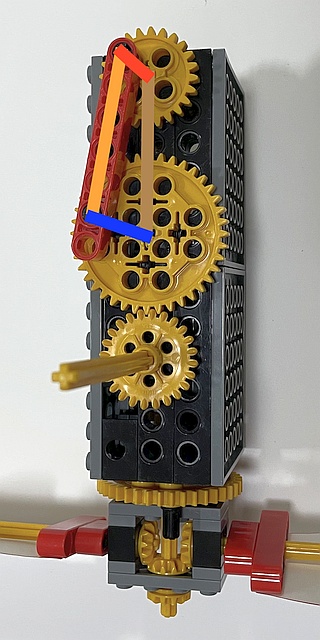
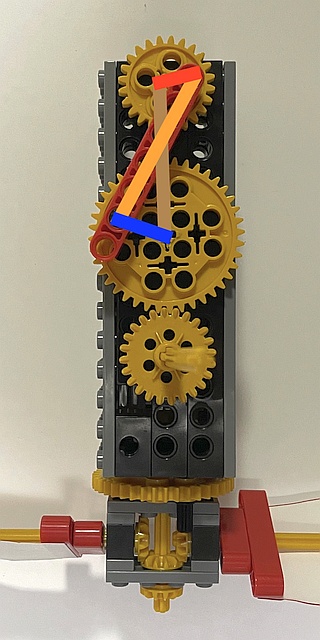
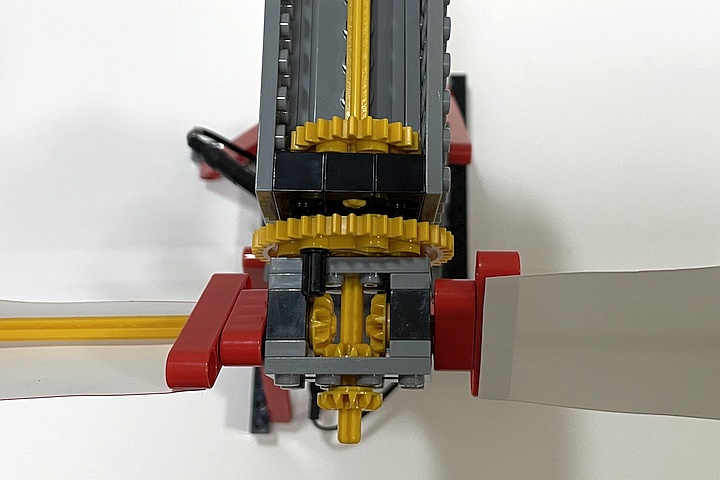
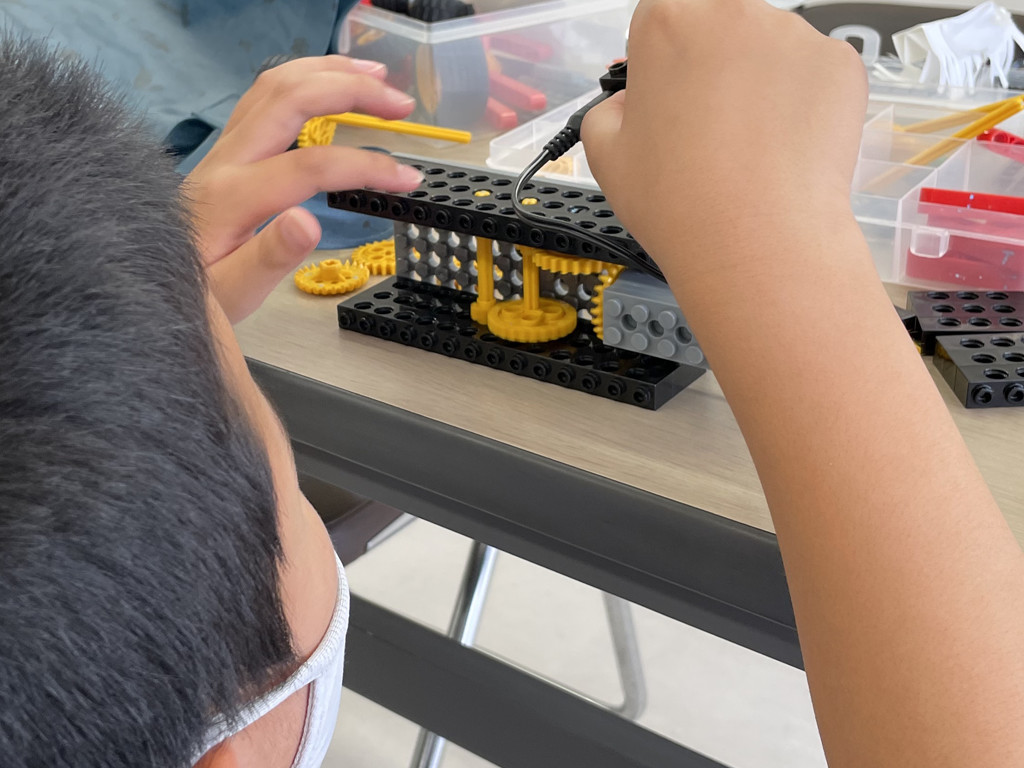
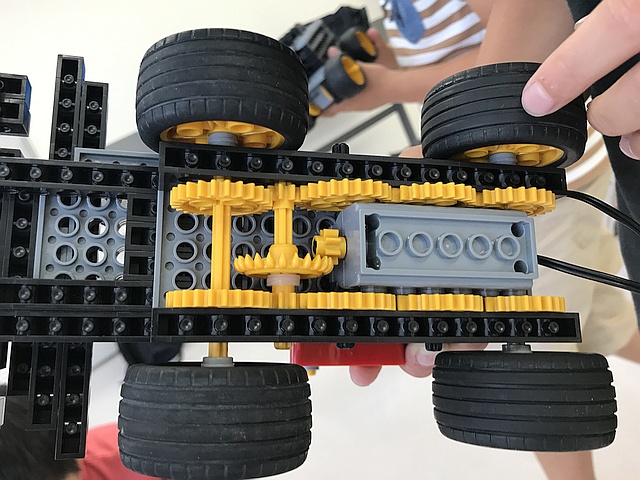 ギアボックスをよく観察してみましょう(*1)。
ギアボックスをよく観察してみましょう(*1)。モーター軸(じく)のピニオンギア(歯数8)が、まずベベルギア(歯数24)を回し、続いてベベルギアと同軸(つまり等速)のピニオンギア(歯数8)が、両隣(りょうどなり)のギアM(歯数24)を回しています。
タイヤはこのギアMと同じスピード(等速)で回転します(*2)。
 歯数8のギアが歯数24のギアを回す構成が2段ありますので、1段目で1/3に減速(げんそく)、2段目でさらに1/3に減速することになり、モーターの回転を1/3×1/3=1/9に減速してタイヤを回しています。
歯数8のギアが歯数24のギアを回す構成が2段ありますので、1段目で1/3に減速(げんそく)、2段目でさらに1/3に減速することになり、モーターの回転を1/3×1/3=1/9に減速してタイヤを回しています。つまり、モーターが9回転してタイヤがやっと1回転する遅さです。
遅いだけなら、何のメリットがあるのでしょう?
実は回転する力(トルク)が9倍になるという恩恵(おんけい)があるのです。
試しに、タイヤを外したシャフトを手でギュッと摘(つ)まんでみてください。
大人でも止められない程に強力ですよ。レスキュー隊として頼もしい力強さが準備できました。

2日目では、ロードクリアランスの問題を解決します。
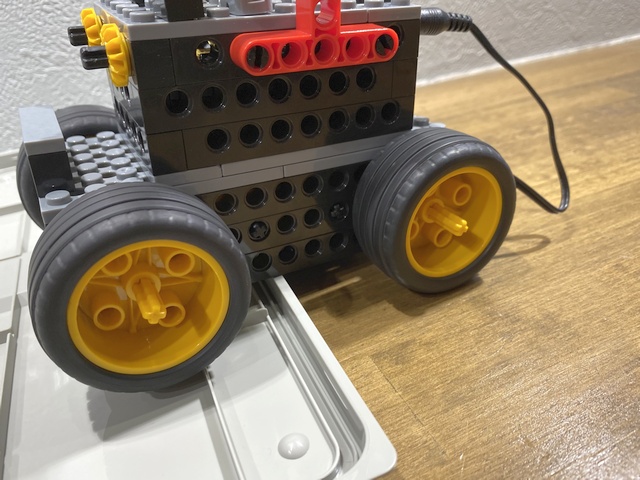
もっと大径のタイヤを装着できればよいのですが、タイヤLで最大ですので、代案が必要です(*3)。
そうです、タイヤSをクロールする手のように装着するのは、瞬間的に地上高を上げる効果も狙(ねら)っているためです。
バタバタと騒々(そうぞう)しいですが、これで多少の凹凸(おうとつ)は乗り越えられるようになりました。

あとは、4脚(きゃく)の取り付け方向ですね。
4脚ともそろえるのか、左右はそろえて前後でずらすのか、全てを90°ずつずらすのか。
後者ほど、いずれかの脚(あし)が地面を掻(か)いている期間が長く、推進効率に優れそうですが。
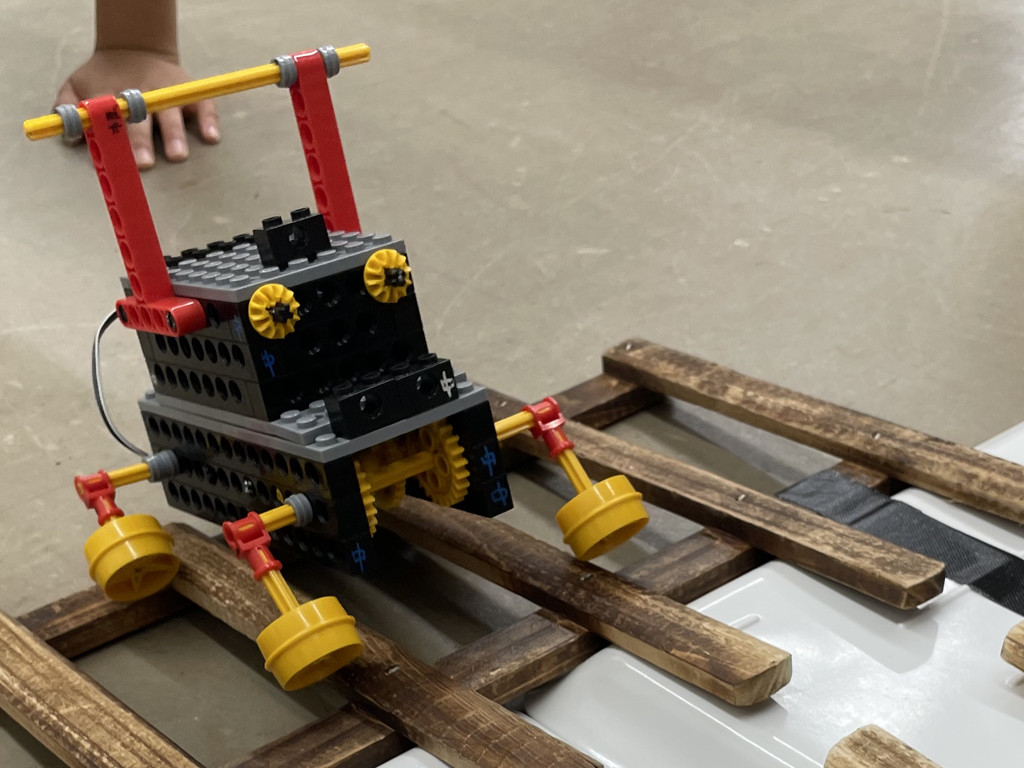
 最後の競技は、がたごとレース!
最後の競技は、がたごとレース!瓦礫(がれき)に見立てた材木等を敷(し)き、成功率20%の難関コースを乗り越えて救助に向かえるかどうかを競います。
瓦礫を前に立ち往生(おうじょう)し、脚がもげるなど、「救助隊が必要な救助隊」が多い中、4脚の向きを全てずらしたロボットの成功が目立ちました(*4)。
4脚ともそろえたロボットでは、どの脚も着地していない間に、せっかく乗り上げた瓦礫を底面で滑(すべ)り下りてしまいました。
左右または前後の2脚ずつそろえたロボットでは、瓦礫に乗り上げて傾いた胴体をさらに傾かせ、転覆(てんぷく)するか、でんぐり返っていました。
 ただ、路面の起伏(きふく)や摩擦状況により最適な構成が変わり得ますので、脚をそろえるのが常に不利と思わないようにしてください。
ただ、路面の起伏(きふく)や摩擦状況により最適な構成が変わり得ますので、脚をそろえるのが常に不利と思わないようにしてください。激しい凹凸を乗り越えるだけなら、4脚一斉(いっせい)に胴体を持ち上げた方が有利のはずです。
 その後、胴体着地している間に滑り落ちないよう工夫すれば最強かもしれません。
その後、胴体着地している間に滑り落ちないよう工夫すれば最強かもしれません。*1 もしくは、テキストp.7~8の写真を見てください。
*2 前タイヤは、一方のギアMと同軸に付けられて等速で回り、後ろタイヤも、もう一方のギアMから始まって、ギアM同士で等速に伝わります。
*3 タイヤLのまま車高を上げるのに、底のプレートLやビーム最下段を外すアイデアも出ました。
過去には「ハイリフト車」も登場しました。高い重心のせいで転びやすい問題もありましたが。



*4 胴体と干渉(かんしょう)しないようクリアランスを確保しつつタイヤLに換装(かんそう)するなど、独自の工夫を凝(こ)らして走破(そうは)した人もいました。
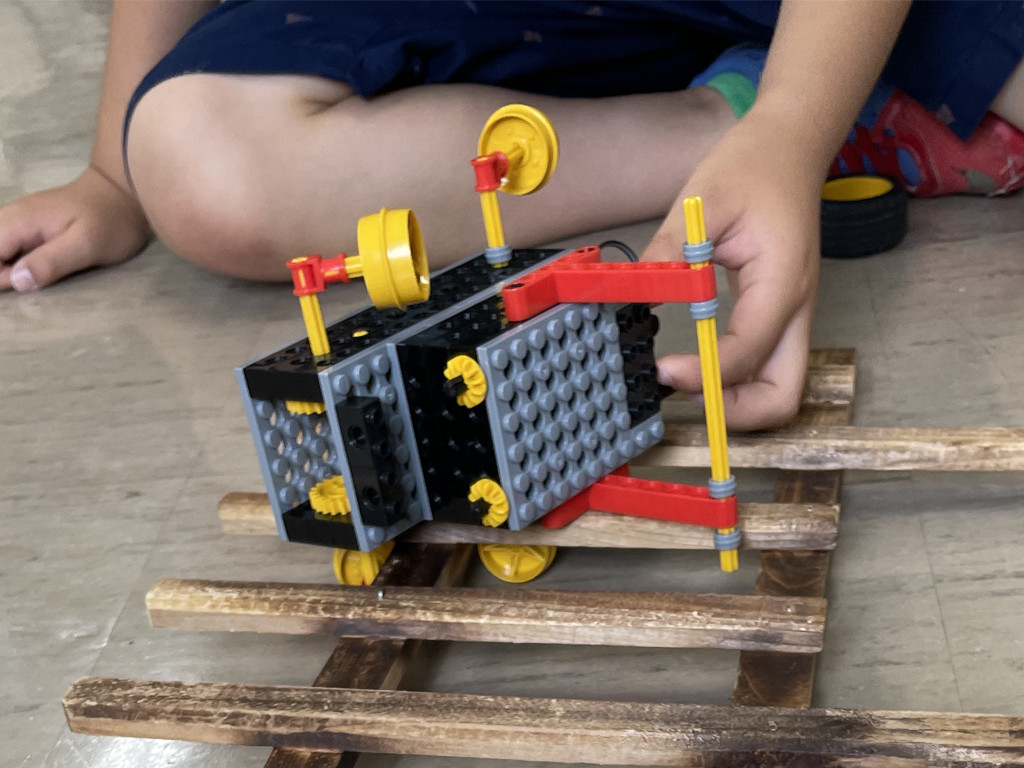
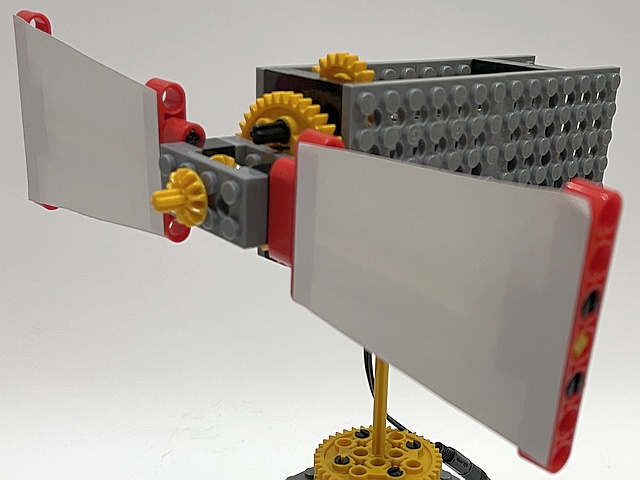
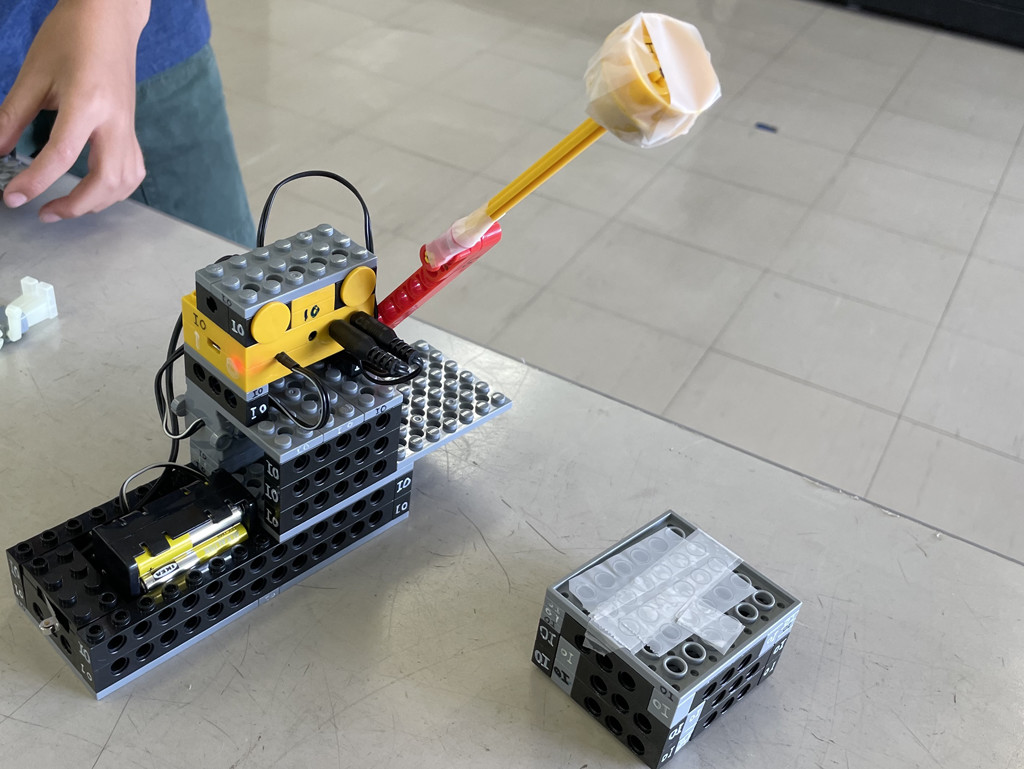
1.3 <ミドルコース『扇風丸』>

1月~6月まで追加された新作テーマの第六弾!
プロペラ風力を利用したロボットの初登場です。
1日目のロボットは、首振り扇風機です。
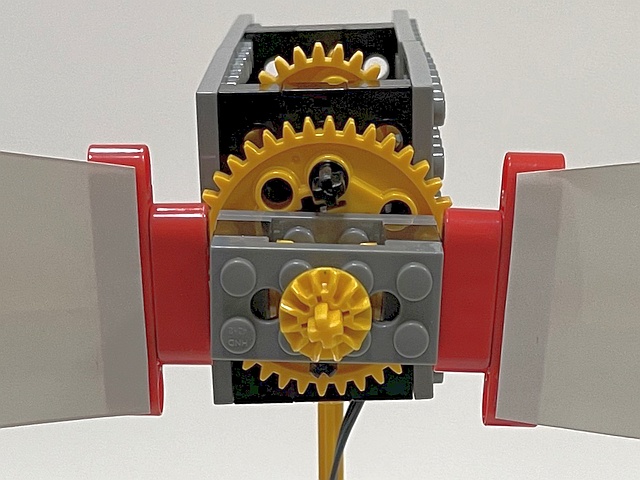
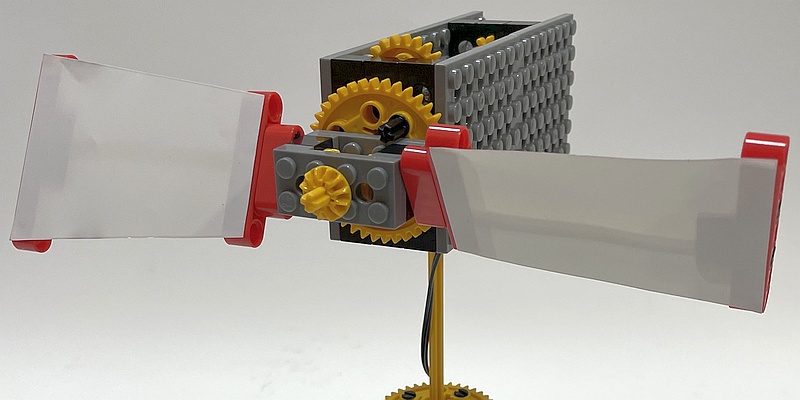
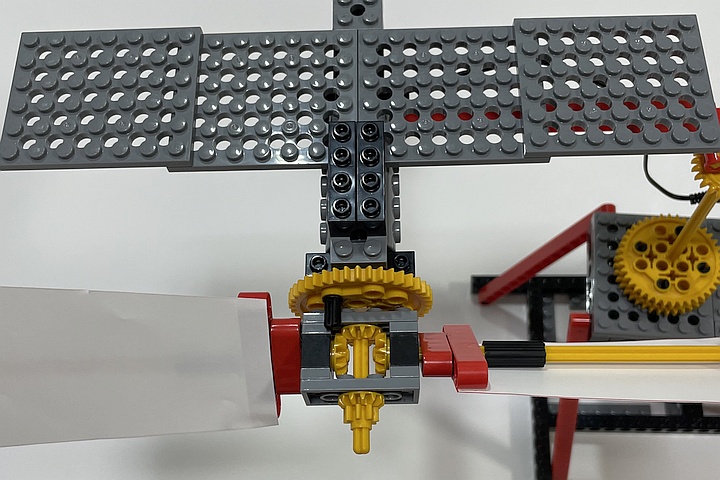
プロペラが風力を生み出すには、回転面(回転半径が作る垂直面)に対して、プロペラの羽根(ブレード)がある程度の角度で傾いてなくてはなりません。
この角度のことをピッチ角(または翼角)と呼びます。このピッチ角を付ける仕組みが秀逸(しゅういつ)です。
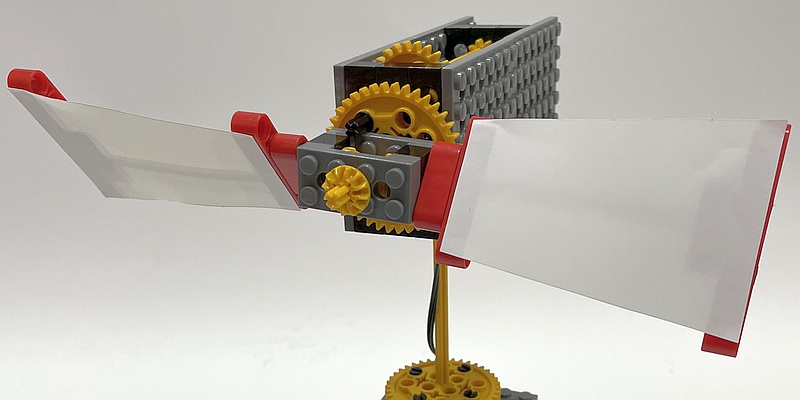
左右のブレードから成るプロペラ一式は、モーターがダイレクトドライブするギアLから回転が伝わりますが、
実際にプロペラに回転力を掛けるのは、ギアLに挿した一対(いっつい)のシャフトペグです。
 このシャフトペグとプロペラ部の間には、少し隙間(すきま)を空けることができます。
このシャフトペグとプロペラ部の間には、少し隙間(すきま)を空けることができます。このようなパーツ同士の“がたつき”のことを“遊び”と呼びます。
今回のプロペラ設計では、この遊びが要(かなめ)なのです。
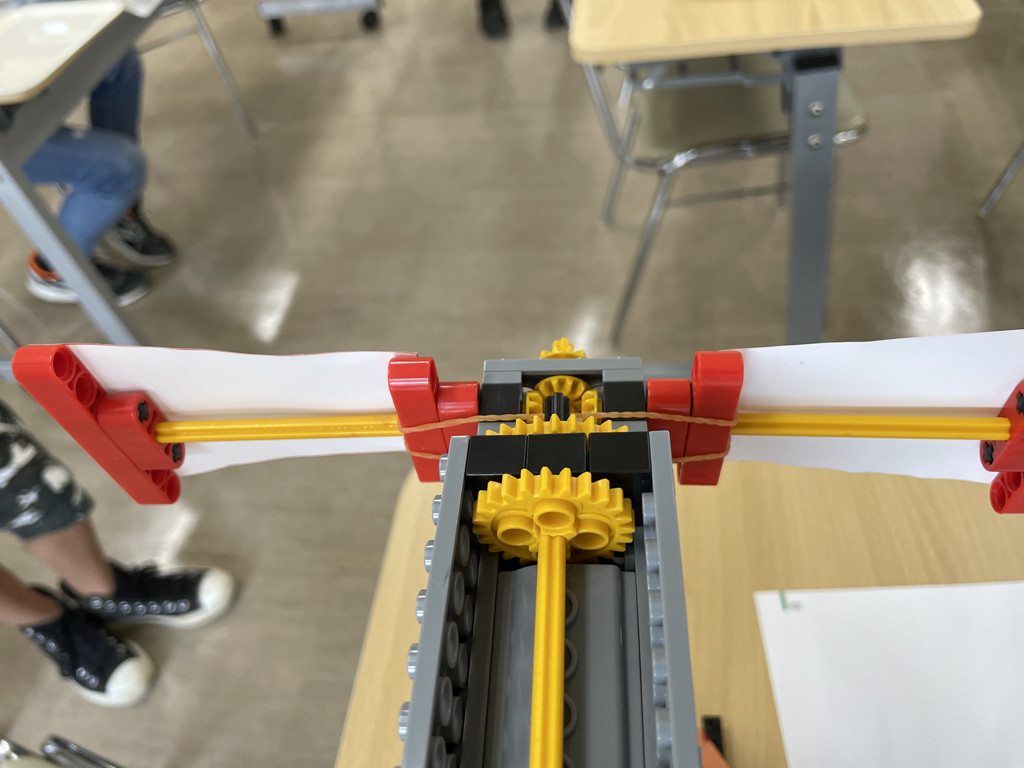
 テキストp.9の通り、シャフトペグが最も離れる位置(遊びの中央)にあるときに左右のブレードが垂直に揃(そろ)うよう組み立てておけば、
テキストp.9の通り、シャフトペグが最も離れる位置(遊びの中央)にあるときに左右のブレードが垂直に揃(そろ)うよう組み立てておけば、シャフトペグが当たる(遊びを使い果たす)位置関係にあるときは、左右の軸を互いに逆回転させるギアボックス(コの字に組んだマイタギア3枚)の作用により、ブレードに左右対称のピッチ角が付きます。
ここで、もし、ピッチ角が0°(遊びの中央)のまま回転すれば風力を生み出せないことになりますが、大丈夫なのでしょうか?
2つの物理現象により担保(たんぽ)されますので、大丈夫です。
1) 慣性(かんせい)の法則
 乗っている自動車が急加速すると、頭がのけぞってヘッドレストに当たるように、
乗っている自動車が急加速すると、頭がのけぞってヘッドレストに当たるように、物体はスピードを変えるときに慣性抵抗という抵抗力を示します。慣性の法則と呼ばれます。
スイッチONしてギアLの回転を加速させると、プロペラに抵抗力が現れ、なるべく遅れて回るような位置まで遊びを使い果たします。
2) 空気抵抗
プロペラの回転スピードが上がりきって一定になると、慣性の法則が働かなくなり、シャフトペグをプロペラに押し当てる作用が消えそうです。
このままでは、ちょっとした振動やモーターの速度変化によってシャフトペグが離れ、ピッチ角が安定しなくなってしまいそうです。
ここでバトンタッチするかのように現れる作用が、空気抵抗です。
ブレードが風力を生むのは、空気を押しのけているからに他ならず、回転を止めようとする抵抗力(作用反作用の法則)を受けますので、やはりシャフトペグをプロペラ部に押し付けてくれます。
ところで、テキストに指示がありませんが、スイッチを入れる向きはどちらでしたか?
逆回転させると、逆向きの風が出そうですよね?
普通のプロペラはそうですが、これは言わば“自動ピッチ切替え機構付きプロペラ”なのです!
逆回転させればピッチ角も逆に傾くので、同じ向き(前方)に風を出します。
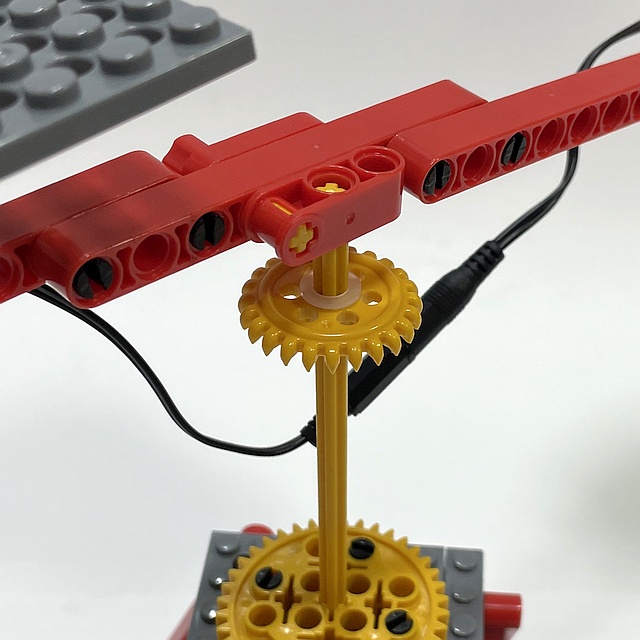
本物の扇風機のように、プロペラ用モーターの回転を減速して(*1)、
首振りの往復運動へ分配する「てこクランク機構」もナイスです(*2)。

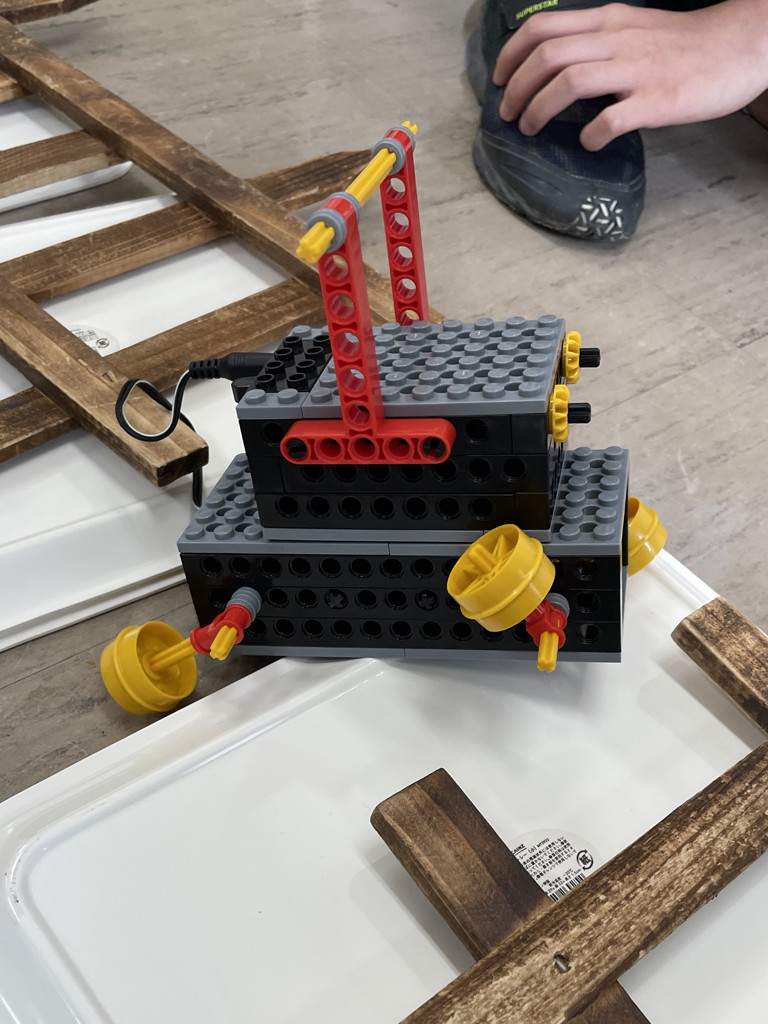
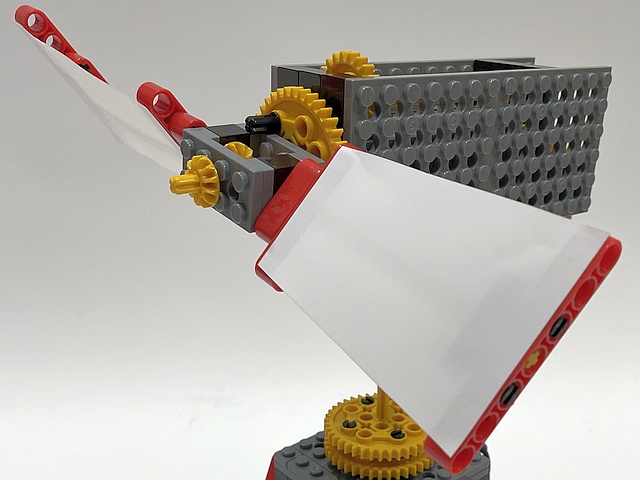
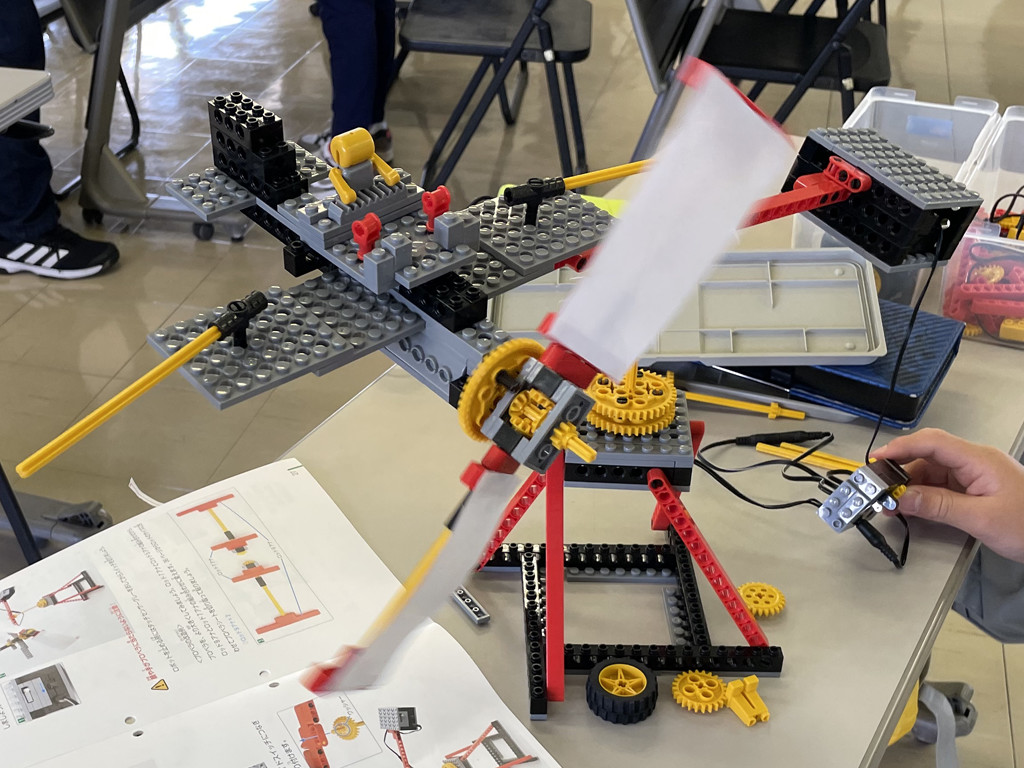
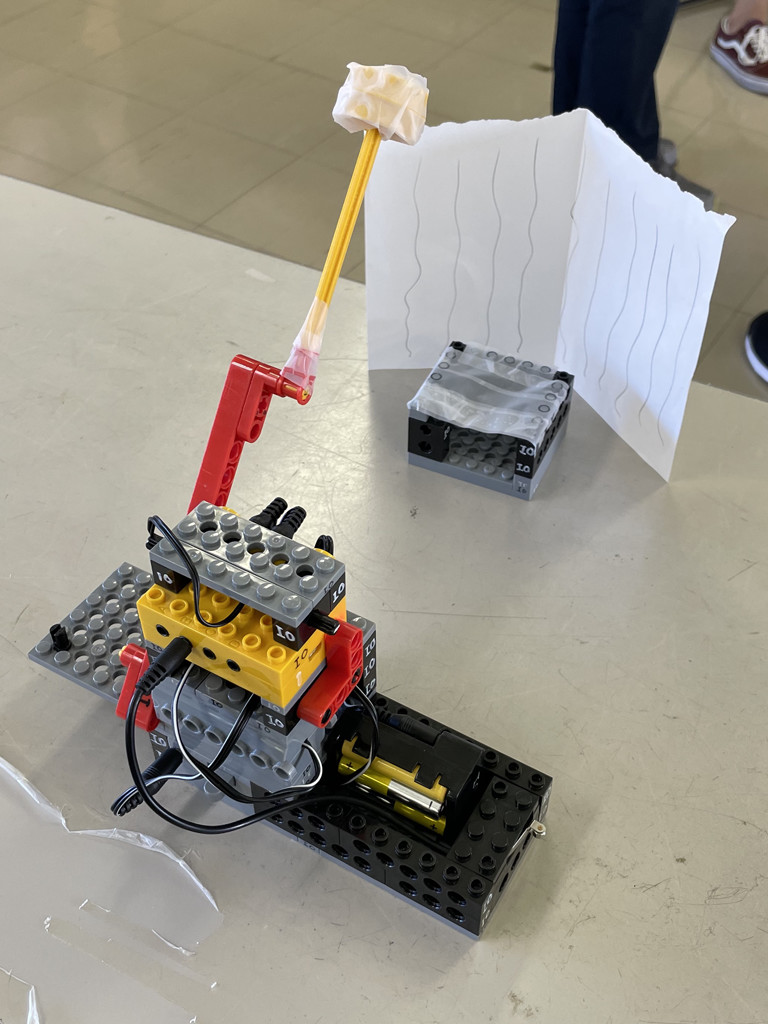
 2日目は、扇風機の土台とプロペラ部材を再利用しつつ、飛行機に改造しました。
2日目は、扇風機の土台とプロペラ部材を再利用しつつ、飛行機に改造しました。同じようなプロペラなのに、プロペラも分解して組み直したのはなぜでしょうか?
そうです、扇風機と飛行機では、プロペラが出す風力の向きが反対であるところ、
“自動ピッチ切替え機構付きプロペラ”のせいで、逆回転させても用を足さないからです(*3)。
大きな推進力が欲しい飛行機ですから、作り直すついでに、ブレードも長くしたり、大きくしたりしましたね。
プロペラ推進力の足かせにならないよう、旋回(せんかい)中心の摺動(しゅうどう=擦れ合う)部を、ベベルギアの背のリング状凸部や、挟(はさ)んだワッシャーに限定して、少しでも摩擦(まさつ)力を減らそうとする工夫も好きです。



*1 1/3減速ギア(ピニオンギア ⇒ ギアM/ベベルギア)3段により、1/27に減速しています。
家電の扇風機では、高い減速比(1/150程度)が簡単に得られるウォームギア(worm gear)を使用して首振りさせています。
《ウォームギヤ》https://ja.wikipedia.org/wiki/%E3%82%A6%E3%82%A9%E3%83%BC%E3%83%A0%E3%82%AE%E3%83%A4
*2 てこクランク機構は、先月のワニ型ロボット『ロボゲーター』でも下半身をくねらせるのに多く使われました。
*3 逆回転しても風向が変わらない設計を狙(ねら)ったわけではなく、
「パーツを組み合わせてピッチ角を付けた機構上そうなってしまった」と考えられます。
1.4 <アドバンスコース『ロボビート①』割愛>
このドラマーロボットも面白いのですが、レース大会向けマシン注力の為、割愛します。
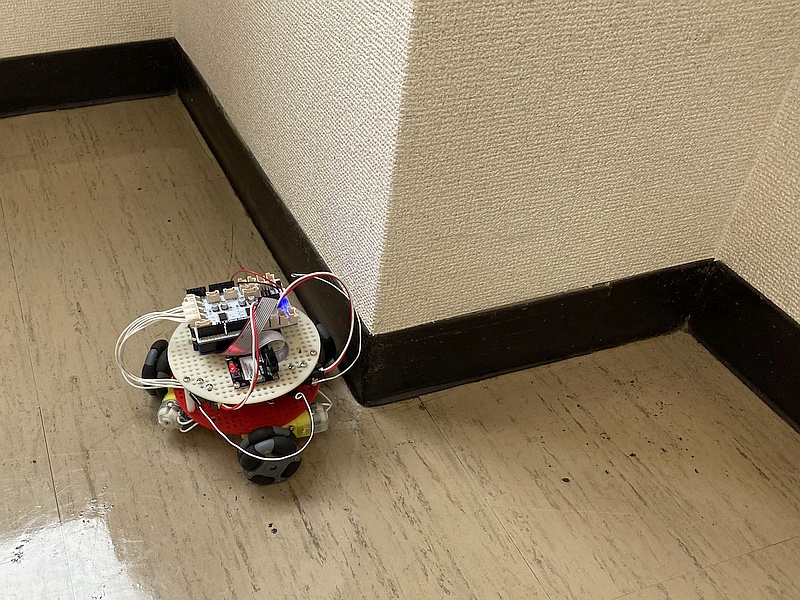
1.5 <プロ1年目コース『オムニホイールロボット③』>
オムニホイールロボットの3ヶ月目、最終月です。
知的ロボットに必要な「感じて」「考えて」「動く」機能のうち、先月までは「考えて」「動く」だけでした。
いや、「考える」といっても、定めたプログラム通りに動くだけで、せいぜい次の動作に移行する秒数を計っているだけでした。
想像してみてください。いくら“脳ミソ”があっても、外界との接点が無ければ(目も耳も鼻も触覚さえも!)、意識は闇の中…。息が詰まりそうですね。
1日目では、「感じる」触覚を与えます。
丸い本体の前部(頭部?)に左右のタッチセンサーを取り付け、そこから針金(触角?)を2本伸ばします。まるでテントウムシですね。
針金に何かが触れると、タッチセンサーがONになって…、どうなる?
それはプログラム次第ですね。そこがマイコン制御方式の良いところです。
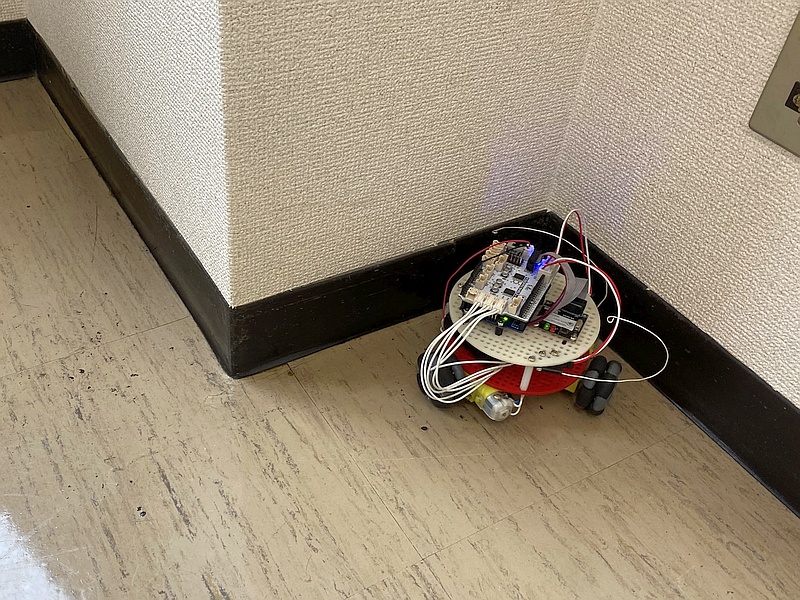
右の触角に触れるとちょっと後ずさり、左の触角に触れると旋回するなど、自由に設計できます。
これだけでも、ロボット掃除機を想わせる動きになります。
どうです?あのスゴイ家電の動作も、こんな感じで実現できてしまうのですよ!
自ら判断して動いてくれるので、生物のような賢さや可愛らしさが出てきます。
これを実現するプログラミング要素を学びました。
“もし、○○だったら△△して、そうでなければ××する”ような判断と行動のルールを与えるもので、“if ○○ { △△ } else { ×× }”の形式で記述します。
条件分岐といって、プログラムには大切な要素です。
これがなければ、ゲームソフトも紙芝居がせいぜいです。
 最終日の2日目は、ラジコン操縦プログラムを転送して、「考える」賢さをコントローラ操縦者に委ね、パイロン走行やサッカー対戦などで走らせ回りました。
最終日の2日目は、ラジコン操縦プログラムを転送して、「考える」賢さをコントローラ操縦者に委ね、パイロン走行やサッカー対戦などで走らせ回りました。この過程で、プログラムの条件分岐を使用して、高速走行モードに入るボタンが決められていることを悪用(?)して、パラメータを改造することもできました(*1)。
以上、3ヶ月にわたり、オムニホイールの走行原理やプログラミングの基礎を学びました。
特に、同じボタンやタッチセンサーでも、押されてどう反応するかはプログラム次第であるという点が、マイコン非接続型のスイッチ(受動素子)では出せない特徴です。


次回以降のテーマでも、マイコンに様々な判断と命令を担わせて、面白いマシンを製作して参りましょう。
*1 実際の自動車でも、ECU(Engine Control Unit)チューンと言って、そういうことが(やろうと思えば)できます。
エンジン/モーターの最大パワーは変わらないものの、アクセル操作に対する応答特性を変える走行モード切替が付いている車もあります。
2. 6月の課題
<スタートアップ(全コース)>
特にありません
<プライマリーコース>
- オリジナル図形プリント
http://robocobo.sakura.ne.jp/blog/HW/RobotP2106-Q.pdf
<ベーシックコース>
- 上記授業内容を精読する(概ね3年生以上/低学年は補助の下で)
- オリジナル課題プリント(3面図+設問)
http://robocobo.sakura.ne.jp/blog/HW/RobotB2106-Q.pdf
<ミドルコース>
- 上記授業内容を精読する
- オリジナル課題プリント(3面図+設問)
http://robocobo.sakura.ne.jp/blog/HW/RobotM2106-Q.pdf
<アドバンスコース>
⇒ロボットレース大会向けマシン注力の為、割愛します
<プロ1年目コース>
- 上記授業内容を精読する(該当テキストページを見ながら)
3. 5月の解答
<プライマリーコース>
http://robocobo.sakura.ne.jp/blog/HW/RobotP2105-A.pdf
<ベーシックコース>
http://robocobo.sakura.ne.jp/blog/HW/RobotB2105-A.pdf
<ミドルコース>
http://robocobo.sakura.ne.jp/blog/HW/RobotM2105-A.pdf
<アドバンスコース>
http://robocobo.sakura.ne.jp/blog/HW/RobotA2104-A.pdf
4. 今後の授業スケジュール
◆小倉北7/4は【真鶴会館】小倉北区真鶴1-5-15(施設駐車場あり)で開催します。
◆8月は盆休み前後シフトあります。
――――――――――【佐藤教室長】――――――――――
[東福間]第1・3土原則<学習ルームでこぼこ>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドバンス
⇒ 7/3, 17, 7/31※, 8/21, 9/4, 18
※8/7→7/31シフトします
[中間]第2・4土原則<なかまハーモニーホール>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドバンス/ロボプロ
⇒7/10 第1回 3F会議室2
7/24 第2回 3F会議室4(和室)
8/7※, 28, 9/11, 25
※8/14→8/7シフトします
[小倉北]第1・3日原則<ムーブ>
- 10:30~ ベーシック/プライマリ
- 13:00~ ミドル/ロボプロ
- 15:00~ アドバンス
⇒7/ 4※第1回 北九州総合労働会館【真鶴会館】4F
7/18 第2回 ムーブ4F工芸室・5F企画ルーム2
8/1, 22※, 9/5, 19
※7/4はムーブフェスタ全館使用につき【真鶴会館】で開催します
※8/15→22シフトします
――――――――――【中野教室長】――――――――――
[八幡東]第1・3土原則<レインボープラザ4F>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドバンス
⇒ 7/3, 17, 7/31※, 8/21, 9/4, 18
※8/7→7/31シフトします
[小倉南]第2・4日原則<総合農事センター2F>
- 10:30~ ベーシック/プライマリ
- 13:00~ ミドル
- 15:00~ アドバンス
⇒7/11, 25, 8/8, 29※, 9/12, 26
※8/22→29シフトします
5. お知らせ
1) 第11回ロボット教室 全国大会下記の要綱でオンライン開催されることになりました。(ロボプロ非対象)
・7/12(月) 17:00 コンテスト(アイデア/テクニカル)エントリー〆切
・7/30(金) 全国大会出場者へ結果通知発送
・8月上旬 テクニカルコンテスト(アドバンス競技)本番用動画収録
・8/21(土) 10:30~17:00 全国大会(東京・名古屋・大阪オンライン中継)
ご案内冊子はありません。詳細は下記HPおよび応募要項PDFをご覧下さい。
●大会概要HP
https://kids.athuman.com/robo/event/convention/2021/
●アイデアコンテスト応募要項PDF
https://kids.athuman.com/general/files/2021robo_idea_applicationrequirements.pdf
●テクニカルコンテスト応募要項PDF
https://kids.athuman.com/general/files/2021robo_tec_applicationrequirements.pdf
※下記レース大会とは別です。授業内では支援しませんが、チャレンジを推奨します。
応募される方は個別にコーチングしますので、ご一報下さい。
2) 5教室合同ロボットレース大会『スピードスターの部』追加設定!募集!
乗り物の進化の歴史は、スピード追求の歴史であった...
蒸気機関が発明され、初めて自動車に搭載されるも時速3km程度であった。
それから130年後、電気自動車が登場し、時速63kmを超えるスピードの公式記録を残している。
 自動車の性能向上は至上命題であり、性能指標の一つとして速さを追求していくことになる。
自動車の性能向上は至上命題であり、性能指標の一つとして速さを追求していくことになる。1889年に世界初の100km/hを突破後、1927年には300km/h、1937年には500km/hを突破...
1963年には従来の内燃機関からジェットエンジンに変わり、700km/hに迫る速度を記録している。
その後も記録は更新され続け、1997年には、なんと音速(1223km/h)を突破している。
なお、この記録は2021年現在も破られていない...
そこで我々は、自動車の絶対的な性能指標となったスピードを極限まで追い求める場を設けた。
ルールはただ一つ。 誰よりも速いマシンを作る。 一番速いマシンが一番優れているのである。
【日時】
‐7/23(金・祝) 5教室合同ロボットレース大会本番中 16:00-16:20
【会場】
‐ユメニティのおがた 小ホール 直方市山部364-4(JR直方駅すぐ)
【競技(時間計測)】
‐スピードスター: 6mコース走行
http://robocobo.sakura.ne.jp/blog/contest/race2021-star.pdf
【対象】
‐全コース生(レース大会出場者)、その兄弟・保護者・友人
【費用】
‐追加エントリ: 1,100円
【表彰】
‐1位表彰と景品授与
【申込‐スピードスター大会】
‐定員(8名)まで先着順
‐キャンセル料は7/1~50%、7/15~80%
【申込‐練習会】
‐設定しません
【申込方法】
‐教室長までメールにてお申込み下さい
3) 5教室合同ロボットレース大会7/23(金・祝)参戦者 募集中
 現在51名エントリー! あと3名で〆切ります!
現在51名エントリー! あと3名で〆切ります!練習会は7/20 23:59までキャンセル無料(7/21 0:00確定)ですので、不要な予約が発生しましたら早めにキャンセルお願いいたします。
【日時】
‐7/22(木・祝) 予行練習会(全5コマ・任意参加)
‐7/23(金・祝) 予行練習会(AM1コマ・任意参加)
‐7/23(金・祝) 大会本番 12:30-16:30
【会場】
‐ユメニティのおがた 直方市山部364-4(JR直方駅すぐ)
 ‐7/22(木・祝) リハーサル室
‐7/22(木・祝) リハーサル室‐7/23(金・祝) 小ホール
【練習会スケジュール】
‐7/22(木・祝) 午前の部 9:30-11:30
‐7/22(木・祝) 昼 の部 12:00-14:00
‐7/22(木・祝) 午後の部 14:30-16:30
‐7/22(木・祝) 夕 の部 17:00-19:00
‐7/22(木・祝) 夜 の部 19:30-21:30
‐7/23(金・祝) 当日の部 9:30-11:30
【競技(時間計測)】
‐プライマリ: 4mコース走行+障害物
http://robocobo.sakura.ne.jp/blog/contest/race2021-pri.pdf
‐ベーシック: 4mコース走行+パイロット取込み
http://robocobo.sakura.ne.jp/blog/contest/race2021-bas.pdf
‐ミドル : 2m折り返し走行+パイロット置き去り
http://robocobo.sakura.ne.jp/blog/contest/race2021-mid.pdf
‐アドバンス: 2mコース走行+パイロット直立配置
http://robocobo.sakura.ne.jp/blog/contest/race2021-adv.pdf (6/5修正)
【対象(目安)】
‐プライマリ: 4月時点プライマリ生、~小3ベーシック生
‐ベーシック: 4月時点ベーシック生、~小4ミドル生
‐ミドル : 4月時点ミドル生、~小5アドバンス生
‐アドバンス: 5月時点アドバンス生、修了生、プロ生
【費用】
‐6・7月授業料: 通常分(修了生の方は9,900円/月)
‐延長指導料 : 550円/回(可能な授業日を都度ご案内)
‐予行練習会 : 7/22…1コマ2,200円※ 7/23…3,300円※
‐大会エントリ: 6,600円※
※弟妹は1,100円引き
【表彰】
‐各コース1~3位表彰の他、景品授与
【申込‐大会】
‐定員(54名)まで先着順
‐キャンセル料は6/21~30%、7/1~50%、7/15~80%
【申込‐練習会】
‐定員・直前まで受付
‐満席時は受入を検討しますので「キャンセル待ち」予約下さい
‐キャンセル料は7/21(水) 0:00~100%
【申込方法】
‐本メール記載の条件に同意の上、全て下記予約サイトより登録下さい
使いにくいですが…「すべてのメニュー」のまま7/22-23の週までめくって下さい
《予約サイト》 https://airrsv.net/robocobo/calendar
【徴収方法】
9月分月謝に加算して頂戴します
【中止・変更時】
‐情勢により開催できない場合は、各教室での成績を集計し、表彰・景品授与を予定します
(この場合、大会エントリ料を3,300円、割引・キャンセル0円とします)
‐中止した練習会または大会費用は徴収しませんが、授業料・指導料は返金できません
‐日程・会場・料金が変更になる場合はご予約を返上し、改めて募集します


4) ロボット教室オンラインサービス[再掲]
アカウント登録すると、毎月のロボットの製作手順を動画で見られるロボット教室オンラインサービスが利用できます。
テキストでは分かりにくい箇所や遊び方などもご覧になれますので、ご活用下さい。
(休会月は利用できません)
《オンラインサービスご案内PDF》
http://robocobo.sakura.ne.jp/blog/net/RobotOnlineService.pdf
《アカウント登録URL (PDF記載QRコード)》
https://form.kintoneapp.com/public/form/show/00008e877a90d5dc03472c81611b94849f6b451581adb93b4b1e993b3fdb7b86
5) 5月課題 高得点者 []内は教室と学年
◆プライマリ【13名平均 図形4.5】
5点…翁[小倉北2], 土屋[小倉北1], 丸吉[小倉北1], 有松[小倉南2], 眞所[小倉南2], 矢野[小倉南2], 吉永[小倉南1]
◆ベーシック【18名平均 図面2.9+設問2.0=4.9】
10点…柴田[小倉北4]
9点…諭[小倉北3]
8点…渡辺[小倉南4]
7点…なし
◆ミドル【11名平均 図面3.3+設問1.9=5.2】
10点…なし
9点…なし
8点…原[小倉南5]
7点…千葉[中間6], 藤津[中間5]
◆アドバンス【6名平均 図面7.8+設問2.5=10.3】
17点…宮尾[八幡東8]
12点…出口[小倉南8]
6. コロナ問題の理解 その3
■マスクの話
http://robocobo.sakura.ne.jp/blog/CoronaOpinion'210630.pdf
東福間・中間・小倉北教室 佐藤 / 八幡東・小倉南教室 中野