2.5月の課題
3.4月の解答
4.今後の授業スケジュール
5.お知らせ
6.コロナ問題の理解 その2
1. 5月授業内容
1.0 <スタートアップ(全コース)>
割愛します。
1.1 <プライマリーコース『ロボシーソー』>
割愛します。



1.2 <ベーシックコース『ロボクリーン』>
 おそうじロボットです。
おそうじロボットです。90°ずつ向きをずらした9本の赤い“ブラシ”を高速回転させる様がにくいですね!
吸引(きゅういん)こそしませんが、あのロボット掃除(そうじ)機『ルンバ』を彷彿(ほうふつ)とさせます。
掃除機として、大事な工夫点があります。
ブラシは高速回転させたいが、本体の走行スピードは…?
疾走(しっそう)されては困るので、タイヤはゆっくり回さなくてはなりませんね。
この相反(あいはん)する要求をどうやって1つのモーターで実現するかです。
部品配置は、モーター ⇒ タイヤ ⇒ ブラシ の順に並んでいます。
回転速度は、速い ⇒ 遅い ⇒ 速い です。
つまり、モーターを一旦(いったん)減速(げんそく)してタイヤを回した後、増速(ぞうそく)してブラシに伝える構成が必要であり、それが筐体(きょうたい)の側面に並んだ大小6枚のギアの役割なのです。
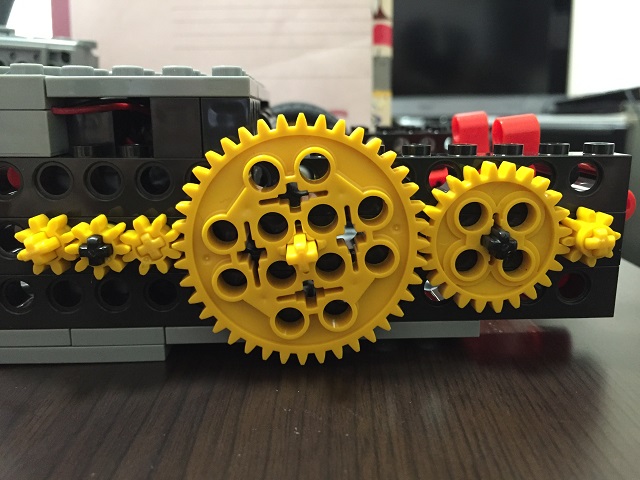 3連のピニオンギア(歯数8)がタイヤと同軸のギアL(歯数40)を回すので、1/5に減速されます。
3連のピニオンギア(歯数8)がタイヤと同軸のギアL(歯数40)を回すので、1/5に減速されます。その後、ギアM(歯数24)を経由してブラシと同軸のピニオンギア(歯数8)を回します。
途中のギアMは気にせず(*1)、ギアL ⇒ ピニオンギア と考えて、5倍の増速になります。
つまり、1/5×5=1 で、モーターと同じ回転数(等速)に戻してブラシを回しているのですね。
《ギアの回る速さについて勉強したい人は、下記を読んでください》
http://robocobo.sakura.ne.jp/blog/bas/bas-1711.pdf
 2日目最後の競技は、ガチンコおそうじ対決!
2日目最後の競技は、ガチンコおそうじ対決!狙(ねら)いを定めたロボットの前に、小さくカットした紙やスポンジのゴミを散りばめ、「よーいドン!」でゴミの争奪(そうだつ)戦(!?)です。
「そこまで!」の合図までに内部に取り込めたゴミの数を競います。
 皆さん、対戦になると燃えますね~。
皆さん、対戦になると燃えますね~。まして、改造の良し悪しがゴミの数に表れますから、時間いっぱい改造に勤(いそ)しむ人もいましたが、かえって本番で成績が振(ふ)るわず、悔(くや)しい思いをしていました。
このロボットで苦心(くしん)するのは、赤いブラシが(当然に)固いプラスチック部品であり、柔軟性(じゅうなんせい)がないので、筐体との隙間(すきま)にゴミが挟(はさ)まってブラシが止まりやすいことです。
高速回転(増速)させる分、回転力(トルク)が弱いので、たやすく停止します。

 この問題を解決しようと、過去にすばらしいチャレンジも見られました。
この問題を解決しようと、過去にすばらしいチャレンジも見られました。ブラシの毛(クロスジョイント)が固いのは仕方がないので、シャフトに“半固定”し、毛一本一本の回転力を弱めるアイデアです(*2)。
1) クロスジョイントをシャフト(十字形断面)の周りに固定するのではなく、自由にぶら下がるよう、十字穴ではなく丸穴に通す
2) クロスジョイント同士が密着するよう、ブッシュやグロメットで隙間を埋める
これには、
●詰まらない限り、全ての毛がシャフトと一緒に回転する
●詰まった毛だけ止まり、ブラシ全体の回転を止めない
という設計思想がしっかり体現されています。
肝心(かんじん)のゴミ取り性能はともかく、何か問題に直面した時、限られた部材(キット)の中でも「何か解決方法がある」という好例です。
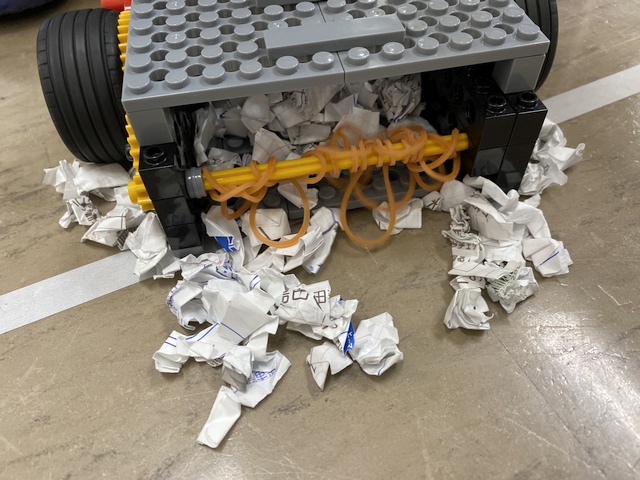 他には、毛として、回転シャフトに輪ゴムか結束バンドをくくり付けてはどうでしょう。
他には、毛として、回転シャフトに輪ゴムか結束バンドをくくり付けてはどうでしょう。紙の短冊(たんざく)を巻き付けた人もいました(*3)。
内部の汚れが問題になるほどゴミが取れてしまうかもしれませんよ。


*1 ギアMを気にして計算しても、40/24×24/8=40/8=5 と同じです。
間にギアMを挟んでいる理由は、回転方向と位置を調整するためです。
*2 スリップトルク(滑り摩擦力を利用した回転力伝達)や、トルクリミッター(回転力制限装置)呼ばれる機械要素です。
*3 アドバンスコース掃除ロボット『ロンボ』で同じ工作をします。
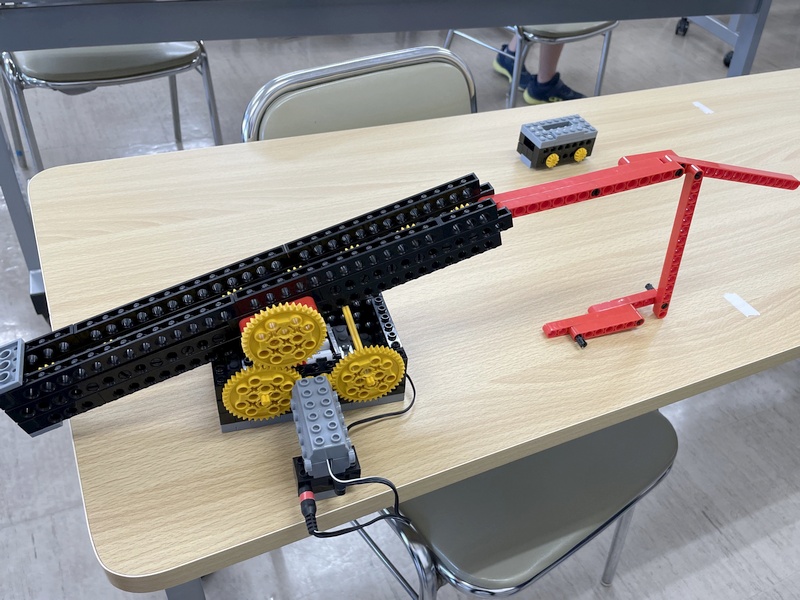
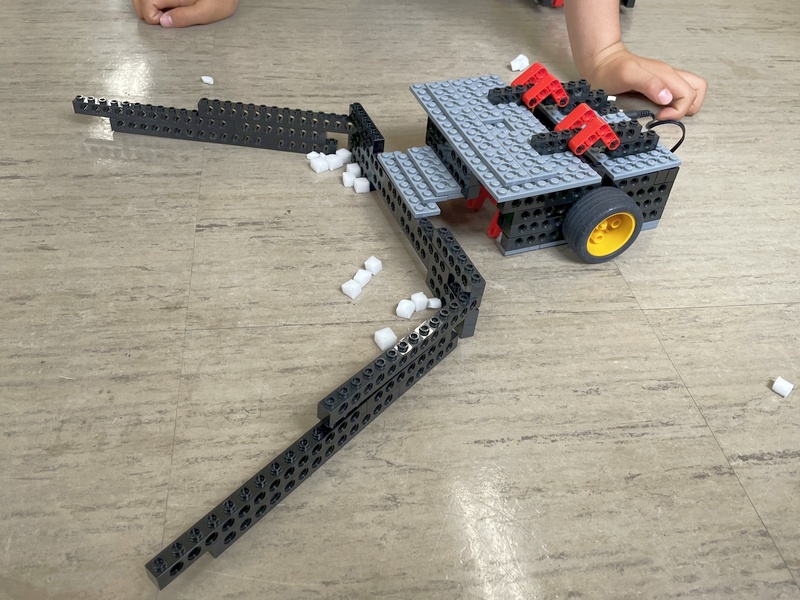
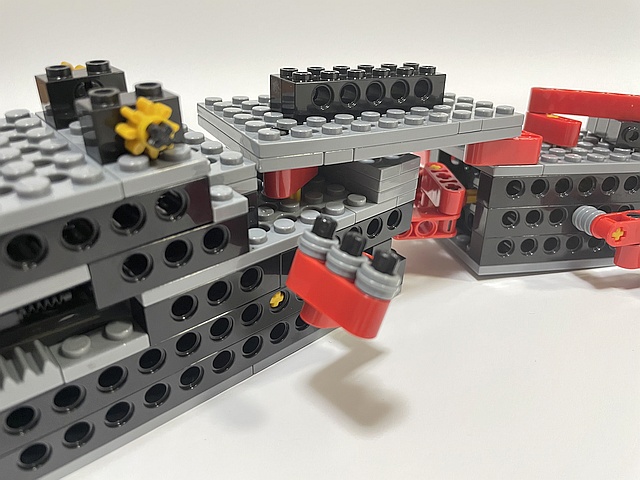
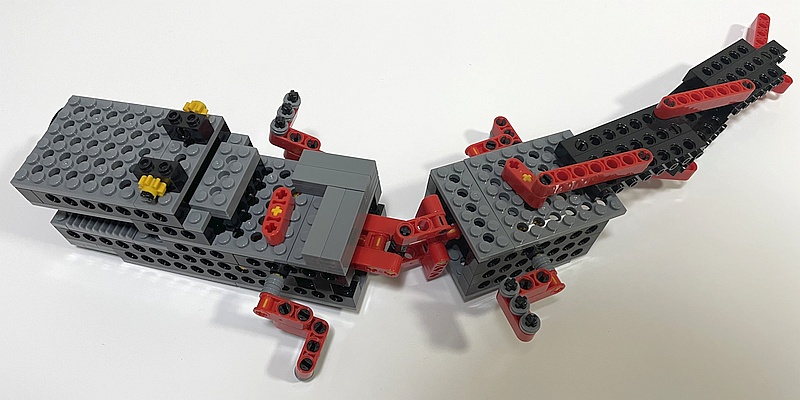
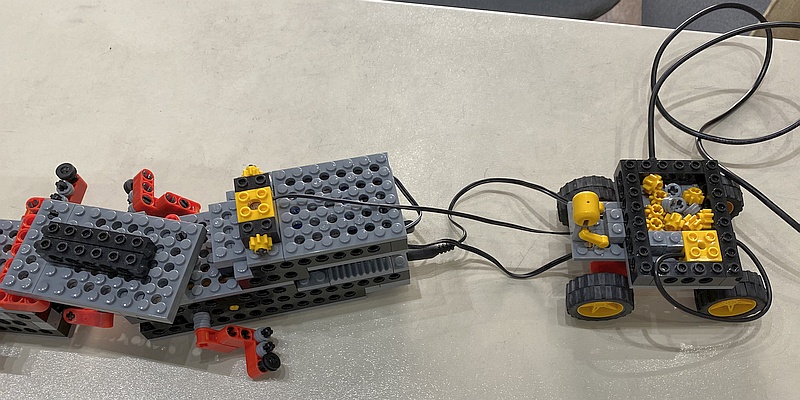
1.3 <ミドルコース『ロボゲーター』>
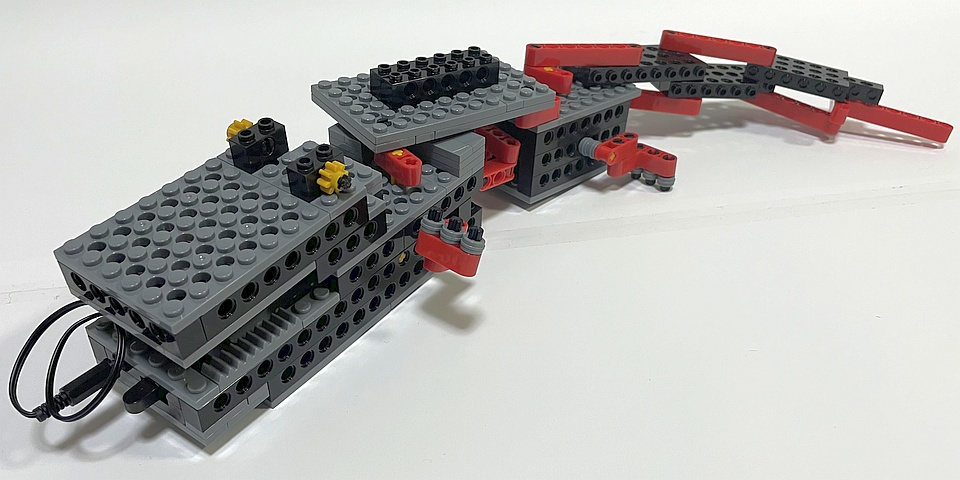
1月~6月まで追加された新作テーマの第五弾!
第8回アイデアコンテスト全国大会(2018年)発表作品(当時小2)がベースの、ワニ型ロボットです。

1日目のロボットは、後ろ足をシャフトドライブ方式で駆動する特徴はあるものの、4本足を同期動作させる上で特にメリットはありません(*1)。
 2日目で下半身を“くねらせる”改造に意味がありました。
2日目で下半身を“くねらせる”改造に意味がありました。下半身をくねらせることができるのは、上半身の背中で回るロッド3アナに挿(さ)したプレート(ユニバーサルジョイントを覆うカバー)が下半身を押したり引いたりする「てこクランク機構」によります。
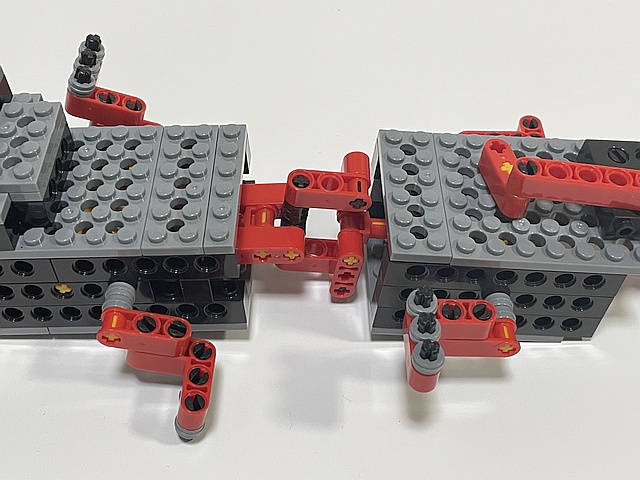
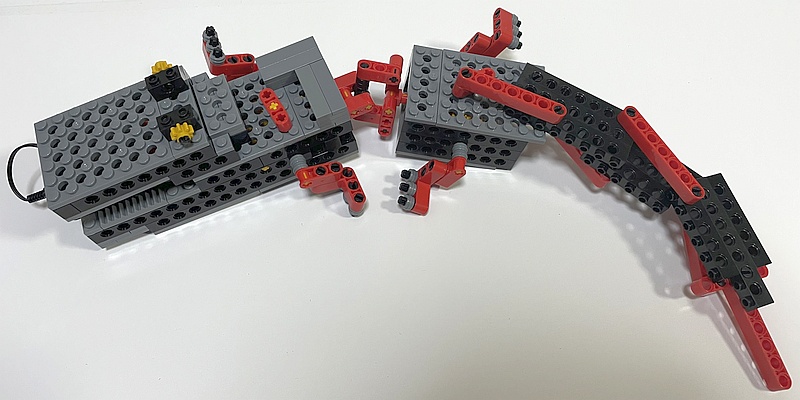 シャフトドライブは、1本の単なるシャフトから、「ユニバーサルジョイント」を介して伝達するようにしました。
シャフトドライブは、1本の単なるシャフトから、「ユニバーサルジョイント」を介して伝達するようにしました。ユニバーサルジョイントの採用は、2020年3月『ステアリングカー』に次ぐ2例目です。
ユニバーサルジョイントにより、下半身をくねらせて、上半身のモーターとは回転軸(シャフト)の方向が(一直線から)ずれても回転を伝えられるようになります。
これが無ければ乗り物が作れない程の大発明です(*2)。
さらに、尻尾(しっぽ)の部分を“しならせる”工夫も施(ほどこ)しました。
後ろ足のギアボックスの背中でもロッド3アナの回転動力を取り出して、
尻尾を構成する4段(ビームの塊×3段 + Tロッド)のリンク(*3)とも「てこクランク機構」により折り曲げて、
尻尾の先ほど(胴体から見れば)曲がる角度を深くしています。
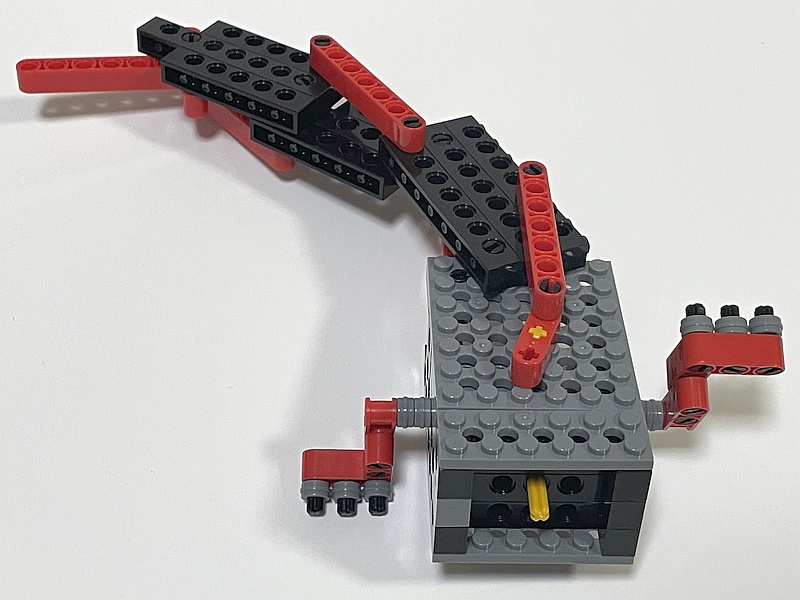
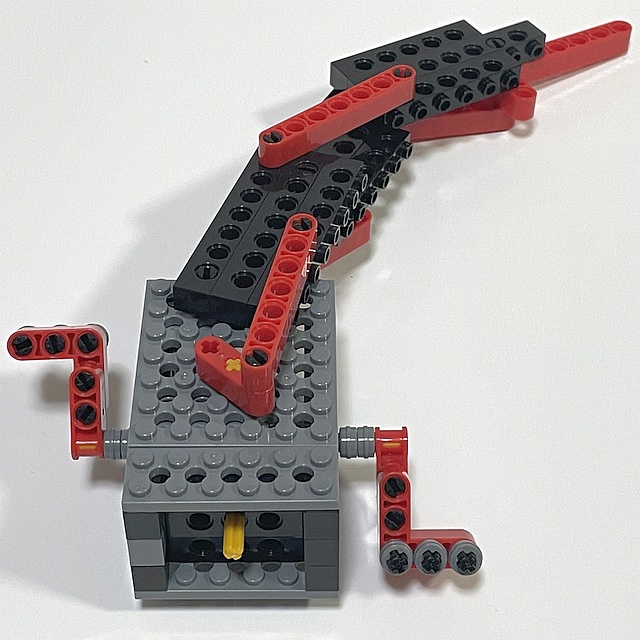
このような多数の「てこクランク機構」によって胴体や尻尾をしならせる様子は、ロッド(3アナや7アナ)による伸縮作用を筋肉で、ペグを関節、その他のリンクを骨で考えれば、実物のワニに似て見えます。
口やデスロールの他に、ワニの攻撃技の一つが尻尾によるアタックですから、ワニロボットは、モーター1個の力で全体を動かすくらいが安心ですね。
音センサーをワニの聴覚にして、そばに部品を散りばめれば、
ミドルコース恒例の「音に反応して動き出す」だけのプログラムで「ワニの守る杯から宝物を奪う」パニックゲームのできあがり!
音センサーの感度で難しさも調整でき、家族ゲームにオススメですよ!
*1 下半身を分離して収納したり、頭部を持ち上げて下半身を“デスロール”っぽく回転させて遊べることくらいでしょうか。
*2 さらに興味が湧いたら、インターネットで調べてみましょう。問題点もあります。
自在継手 https://ja.wikipedia.org/wiki/%E8%87%AA%E5%9C%A8%E7%B6%99%E6%89%8B
*3 リンク(節)とは、ジョイント(関節)ではない、変形しない棒や板のことです。
ここでは、ジョイントはペグ類であり、リンクはその他のパーツの塊を指します。
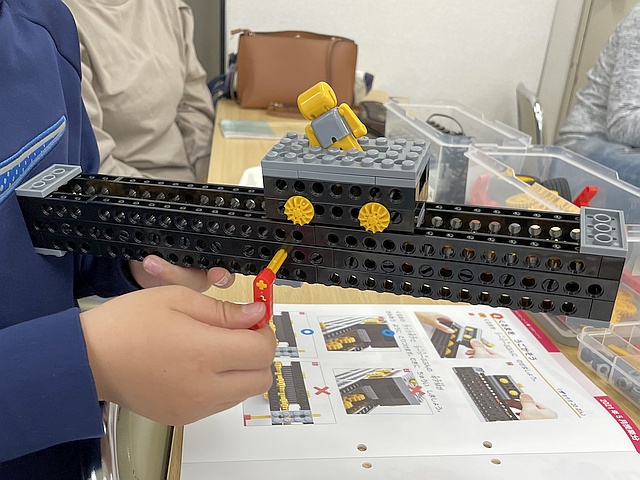
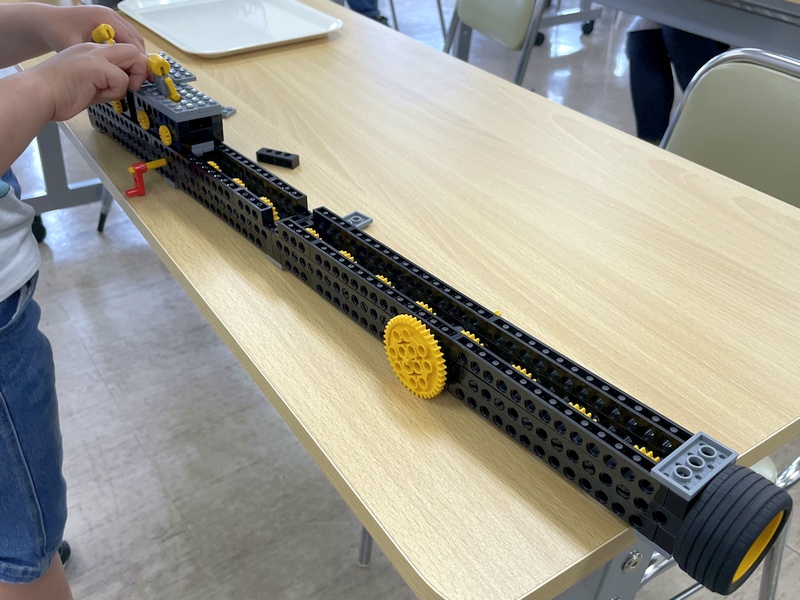
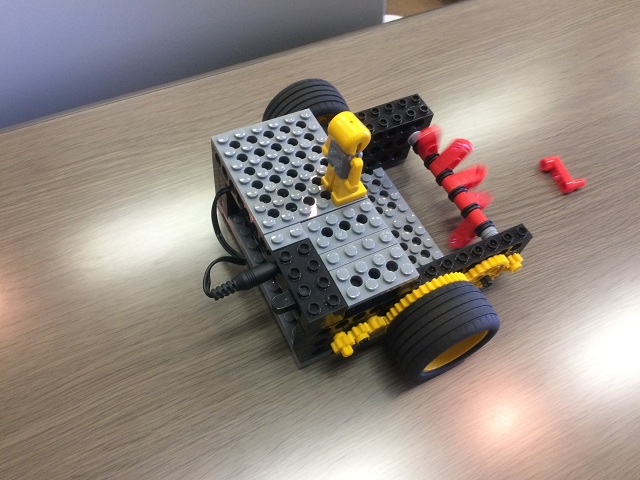
1.4 <アドバンスコース『九九ボックス②』>
1・2日目の九九ボックスは、足し算するのみでした。
その方式は、スイッチを押した分だけ、1桁の文字板が順回りして、数値がカウントアップされるという単純なものでした。
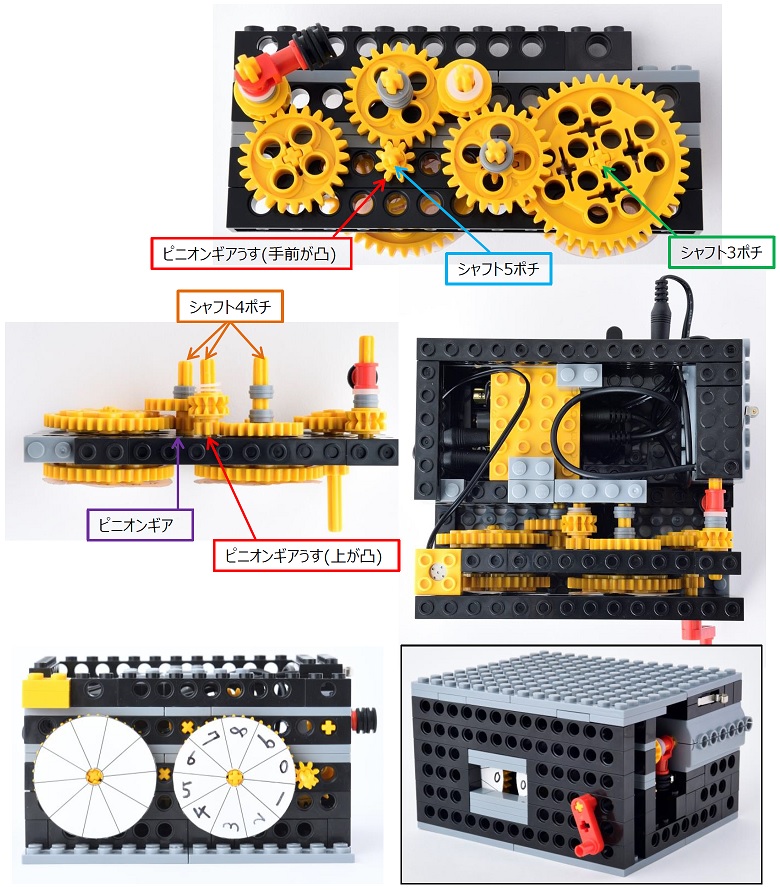 とは言え、モーターが1回転するのをスイッチで検出しながら、その間に文字板(ギアL)の数字が1だけ進むような1/10減速ギアボックスの設計が秀逸かつ斬新です(*1)。
とは言え、モーターが1回転するのをスイッチで検出しながら、その間に文字板(ギアL)の数字が1だけ進むような1/10減速ギアボックスの設計が秀逸かつ斬新です(*1)。3・4日目の授業で、掛け算するプログラムを入力し、それに合わせて文字板を2桁に増やしました。9×9=81 なので2桁要りますね。
この掛け算プログラムは、どのような仕組みで動いているのでしょうか。
テキストでは、1の段から3の段までのモードを作りました。
1の段は、スイッチを1回押すとモーターが1回転し(*2)、文字板が1/10回転だけ回る、単なるカウンターです。
2の段は、スイッチを1回押すとモーターが2回転するプログラムです。
3の段は、スイッチを1回押すとモーターが3回転するプログラムです。
やっていることは、足し算と変わりません。
この掛け算プログラムは、足し算を何回も繰り返すに過ぎませんね。
「プログラムが長い割に、結局、足し算かよ!」と落胆する声が聞こえました。
でもね、加減乗除(+-×÷)は全て足し算で行うことができるんです!
実際、コンピュータ内部では、ほとんどの演算を足し算で行っています。
つまり、九九ボックスはコンピュータの走り!(少し言い過ぎかもしれませんが…)
例えば、2x3 の掛け算であれば 2+2+2 と、九九ボックス同様に2を3回足すことで計算できます(*3)。
引き算はどうでしょう。
この場合は「足してちょうど桁が上がる(10になる)数」を持ち出します。
2なら8、3なら7、5なら5、といった数です。これを補数(ほすう)といいます。
数を引く代わりに補数を足すことで、引き算は足し算に置き換えられます。
9-4=5 → 9+6=15 → 2桁目を無視して 5
2桁目を無視する手順が気に入らなければ、下のような式にすると良いでしょう。
9-4+10-10 = 9+(10-4)-10 = 15-10 = 5
勝手に10を足したので、後から10を引いています。結果は変わりませんよね。
この計算方法では、先に補数を求める必要がありますが、コンピュータ内部で扱う数字は0と1の2つしかありません。1+1=10(イチ・ゼロ)のように桁上がりします。
ですから、1の補数は0、0の補数は1と、簡単に決まってしまいます。
実際、電子回路にとってこの変換作業は楽チンなのです!
これを2進数と呼びます(*4)。
割り算は、この引き算の応用です。
割られる数から割る数を引き算していき、0になるまで何回引いたかを数えます。
8÷2 の計算ならば 8-2-2-2-2=0 ですから、4回引きました。
この4が割り算の答えになります(*3)。
苦労した割に、暗算でできる程度の計算しか行えない九九ボックスでしたが、コンピュータと近い計算方法だと思うと、何だか輝いて見えますね!
見えない? そうですか? よーく見てください、マイコンのLEDが輝いてますヨ!!


*1 ロボット教室で唯一。
*2 実際はスイッチを押している間に鳴る音の回数で指令します。
*3 実際に必ずしもこのように処理されているとは限りませんが、一つの方法として使われる場合があります。人間と違って、足し算こそ超高速にできるように作られているからです。
*4 「地球人は10進数を使っているようだ…指が10本だからかな…」by 火星人
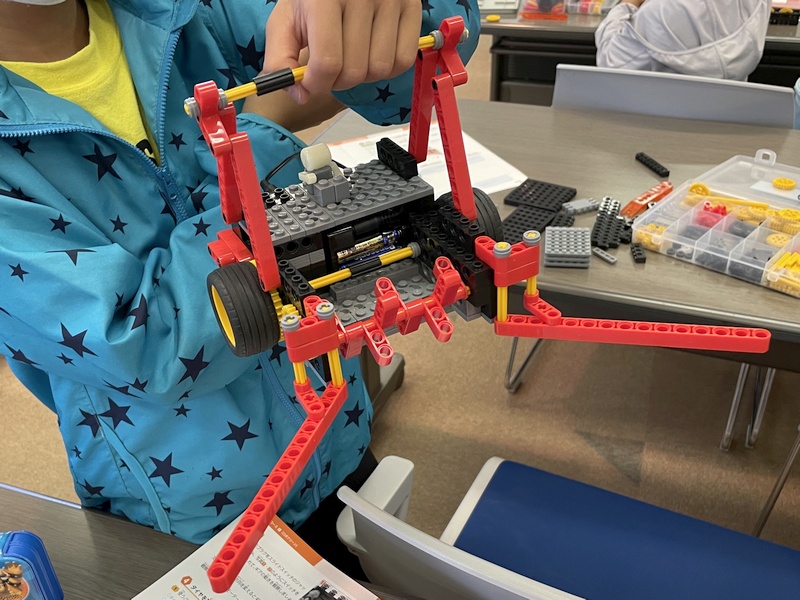
1.5 <プロ1年目コース『オムニホイールロボット②』>
1ヶ月目に製作したオムニホイール(Omnidirectional Wheel;全方向車輪)ロボットの動きの原理を理解し、思い通りの動きをプログラム上で指示できるようになるまでの2ヶ月目の授業です。
1日目は、改めてオムニホイール(車輪)の仕組みを考察し、3つの車輪を任意の速さ・向きに回したときの進行方向が“力(ベクトル)の合成”によって求まることを学びました。
ここでのベクトルは、車輪の回転の向きと速さを、それぞれ矢印の向きと長さで(紙面上に)表したものです。
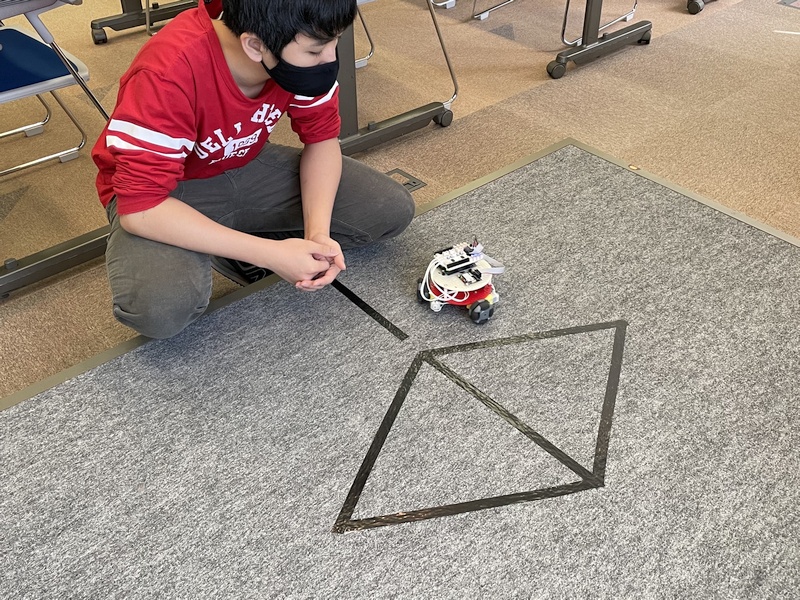 2つのベクトルの合成は、まず作用点(ベクトルの始点)を重ねて、それが平行四辺形の2辺を形成するようにもう2辺を描き足し、作用点から発した対角線(=合力)の向きと長さで表します。
2つのベクトルの合成は、まず作用点(ベクトルの始点)を重ねて、それが平行四辺形の2辺を形成するようにもう2辺を描き足し、作用点から発した対角線(=合力)の向きと長さで表します。3つのベクトルを合成するには、任意の2つを合成した後、その合力と残りのベクトルをさらに合成します。
様々な練習問題を製図して解きつつ、プログラムの数値に反映して動きを確かめ、どんな3輪の回転の組合せでも、ロボットの進行方向を求めることができるようになりました。
2日目に、ロボットの回転する動きを考察します。
1日目では、進行方向を割り出すことができましたが、ロボットが向きを変えずに移動(=並進運動)する場合は、これで十分でした。
しかし、実際は互いに離れた3輪による作用点(ベクトルの始点)を一点(例えば、ロボットの中心)に集めて合成するために、本体が回転しようとする力(モーメント)を扱うことができませんでした。
例えば、3輪とも同じ速さで時計回りに回転させる場合、ベクトルの合成結果は長さゼロの“点”となって、ロボットが移動しないことを言い当てますが、実際の動きは、移動こそしないものの、その場でぐるぐる回り続けます。
この回る動き(=回転運動)を予測できるようにします。
レンチやスパナを想い起こしてください。
支点(回転中心)のある物体に対し、支点から離れた場所(作用点)に、(支点に向かう向きとは異なる)力を加えると、物体は支点の周りで回転します。
この物体を回そうとする作用力を“モーメント”といいます。
支点と作用点の間の距離を単に“長さ”と呼ぶと、
[モーメント]=[長さ]×[力の大きさ]
という関係があり、長いほど回す作用が強くなるという、てこの原理を表しています。
オムニホイールは、3輪とも円周上(円形ボードの縁)に取り付けられているため、円形ボードの中心を支点としてロボットの回転を考えたとき、各ホイールまでの[長さ]が全て等しいので、オムニホイールロボットの[モーメント]を推し量る上では、[力の大きさ](今回はホイールの回転スピード)だけ考慮すればよいことになります。
難しく述べましたが、簡単には、時計回りと反時計回りの回転スピードを差し引きして、ゼロなら回転せず、ゼロ以外ならその値の分だけ優勢な方向に回転する、と言えるのです。
オムニホイールロボットがカーブの軌跡を描いて移動するとき、並進運動だけで実現すれば、飛来するUFOのように向きを変えず、並進運動+回転運動を組み合わせれば、自動車のように自然に曲がることもできるのです。
3つのオムニホイールが生み出す、どんな複雑なロボットの動きも、
“ベクトルの合成”で求まる並進運動と、
“モーメントの合成”で求まる回転運動とに分解して説明できるのです。
最終の3ヶ月目では、このロボットに“触覚”と“頭脳”を植え付け、ロボカップに通ずる自律型ロボットに仕上げます。
2. 5月の課題
<スタートアップ(全コース)>
特にありません
<プライマリーコース>
- オリジナル図形プリント
http://robocobo.sakura.ne.jp/blog/HW/RobotP2105-Q.pdf
<ベーシックコース>
- 上記授業内容を精読する(概ね3年生以上/低学年は補助の下で)
- オリジナル課題プリント(3面図+設問)
http://robocobo.sakura.ne.jp/blog/HW/RobotB2105-Q.pdf
<ミドルコース>
- 上記授業内容を精読する
- オリジナル課題プリント(3面図+設問)
http://robocobo.sakura.ne.jp/blog/HW/RobotM2105-Q.pdf
<アドバンスコース>
- オリジナル課題プリント(見取図+設問)
http://robocobo.sakura.ne.jp/blog/HW/RobotA2104-Q.pdf (4月配信済み)
<プロ1年目コース>
- 上記授業内容を精読する(該当テキストページを見ながら)
3. 4月の解答
<プライマリーコース>
http://robocobo.sakura.ne.jp/blog/HW/RobotP2104-A.pdf
<ベーシックコース>
http://robocobo.sakura.ne.jp/blog/HW/RobotB2104-A.pdf
<ミドルコース>
http://robocobo.sakura.ne.jp/blog/HW/RobotM2104-A.pdf
<アドバンスコース>
翌テーマ1ヶ月目(来月)に配信します
4. 今後の授業スケジュール
◆中間6/12は【折尾商連会館】八幡西区折尾3-1-32(施設駐車場なし)で開催します。
◆小倉北・小倉南6月は【真鶴会館】小倉北区真鶴1-5-15(施設駐車場あり)で開催します。
◆8月は盆休み前後シフトあります。
――――――――――【佐藤教室長】――――――――――
[東福間]第1・3土原則<学習ルームでこぼこ>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドバンス
⇒ 6/5, 19, 7/3, 17, 7/31※, 8/21
※8/7→7/31シフトします
[中間]第2・4土原則<なかまハーモニーホール>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドバンス/ロボプロ
⇒6/12※第1回 【折尾商連会館】2F
6/26 第2回 ハーモニーホール3F会議室2(予定)
7/10, 24, 8/7※, 28
※~6/20ハーモニーホール閉鎖につき【折尾商連会館】で開催します
※8/14→8/7シフトします
[小倉北]第1・3日原則<ムーブ>
- 10:30~ ベーシック/プライマリ
- 13:00~ ミドル/ロボプロ
- 15:00~ アドバンス
⇒6/ 6※第1回 北九州総合労働会館【真鶴会館】4F
6/20※第2回 北九州総合労働会館【真鶴会館】4F
7/4, 18, 8/1, 22※
※~6/20ムーブ閉鎖につき【真鶴会館】で開催します
※8/15→22シフトします
――――――――――【中野教室長】――――――――――
[八幡東]第1・3土原則<レインボープラザ4F>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドバンス
⇒ 6/5, 19, 7/3, 17, 7/31※, 8/21
※8/7→7/31シフトします
[小倉南]第2・4日原則<総合農事センター2F>
- 10:30~ ベーシック/プライマリ
- 13:00~ ミドル
- 15:00~ アドバンス
⇒6/13※第1回 北九州総合労働会館【真鶴会館】4F
6/27 第2回 北九州総合労働会館【真鶴会館】4F(予定)
7/11, 25, 8/8, 29※
※~6/20農事センター閉鎖につき【真鶴会館】で開催します
※8/22→29シフトします
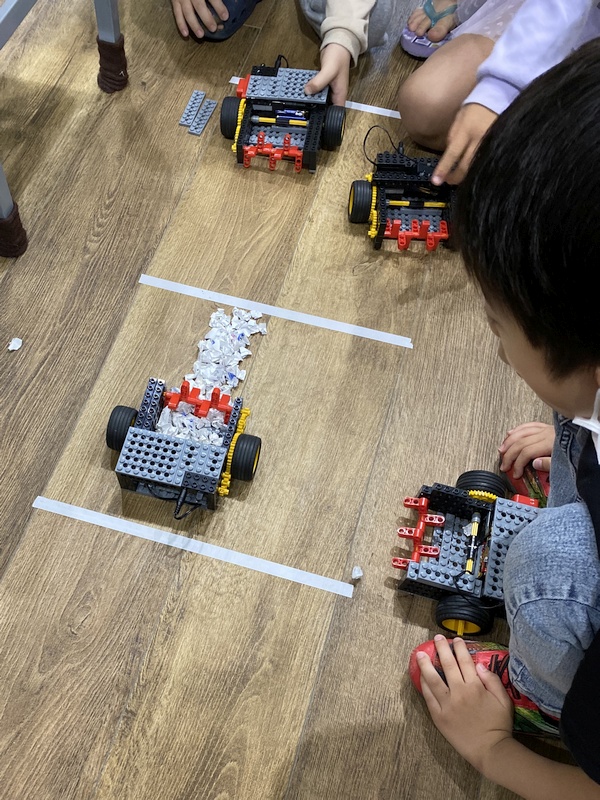
5. お知らせ
1) 5教室合同ロボットレース大会7/23(金・祝)参戦者 募集今年も、本部による全国(特にアドバンスレース)大会の開催が期待できないことから、
昨年に続き、弊5教室合同ロボットレース大会を独自企画することを決意しました。
コンテストへの出品やレース出場は、創作力や理解力など、ロボットの総合力を一気に高める貴重なチャンスと考えており、特に卒業前のアドバンス生にとって、年1回の白熱する全国レース大会の中止による経験ロスは甚大なものでしょう。
 せっかくのオリジナル大会ですので、自作マシンレースの面白さ・挑戦価値をプライマリ~ミドル生にも体感して頂きたく、全コースに設定します。
せっかくのオリジナル大会ですので、自作マシンレースの面白さ・挑戦価値をプライマリ~ミドル生にも体感して頂きたく、全コースに設定します。「マシン作りはカンタン、トップ狙いはムズイ」をコンセプトに、参加の敷居を低くしつつも、入賞は努力の証となるよう設定します。
アドバンス修了生・プロ生も、アドバンス部門で参加募集します。
 また、車好きのお父様にもムキになってもらい^^、家庭でも研究・練習できるよう、特別な機材・コースを使用しません。
また、車好きのお父様にもムキになってもらい^^、家庭でも研究・練習できるよう、特別な機材・コースを使用しません。但し、レース全般の特性として、本番コースでの予行練習・試走はヒントになります。
参戦者は、6・7月テキストのロボットに優先して、レースマシン作りに注力しても構いません。
私設イベントにつき参加費を頂きますが、必ずおネダン以上の学習機会になりますので、ご家族行事として奮って参加下さい!
【日時】
‐7/22(木・祝) 予行練習会(全5コマ・任意参加)
‐7/23(金・祝) 予行練習会(AM1コマ・任意参加)
‐7/23(金・祝) 大会本番 12:30-16:30
【会場】
‐ユメニティのおがた 直方市山部364-4(JR直方駅すぐ)
‐7/22(木・祝) リハーサル室
‐7/23(金・祝) 小ホール
【練習会スケジュール】
‐7/22(木・祝) 午前の部 9:30-11:30
‐7/22(木・祝) 昼 の部 12:00-14:00
‐7/22(木・祝) 午後の部 14:30-16:30
‐7/22(木・祝) 夕 の部 17:00-19:00
‐7/22(木・祝) 夜 の部 19:30-21:30
‐7/23(金・祝) 当日の部 9:30-11:30
【競技(時間計測)】
‐プライマリ: 4mコース走行+障害物
http://robocobo.sakura.ne.jp/blog/contest/race2021-pri.pdf
‐ベーシック: 4mコース走行+パイロット取込み
http://robocobo.sakura.ne.jp/blog/contest/race2021-bas.pdf
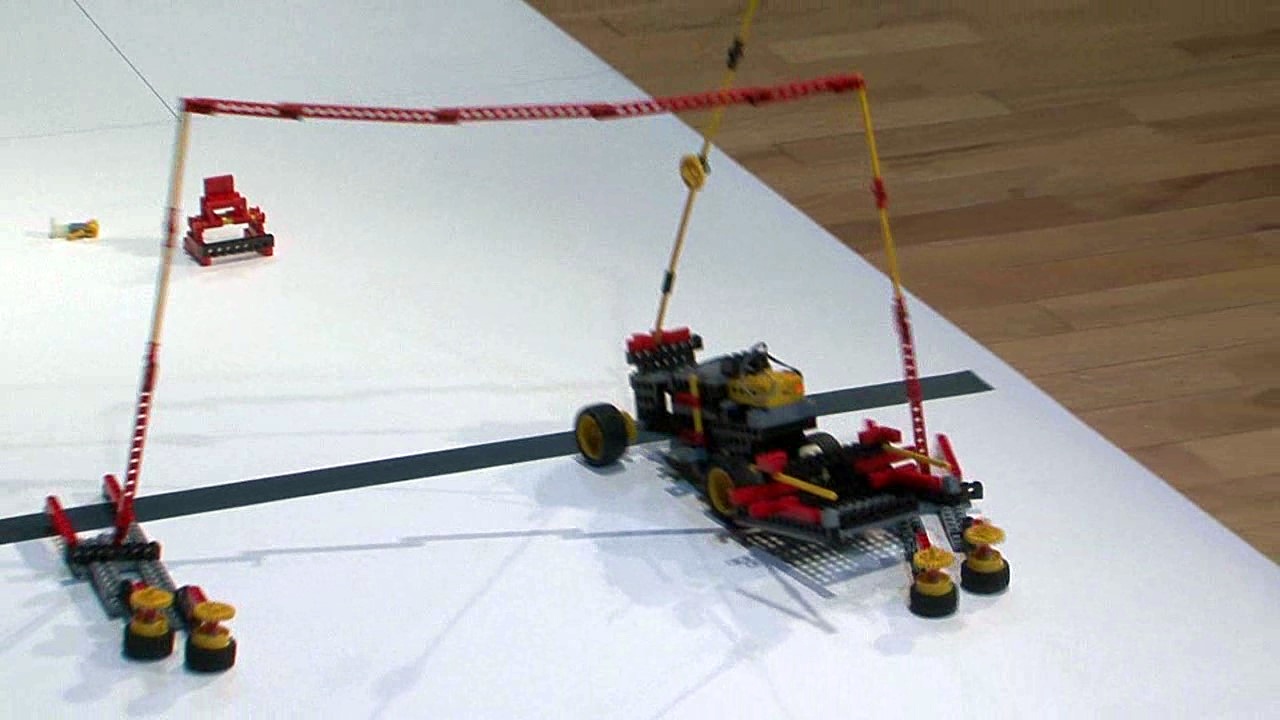
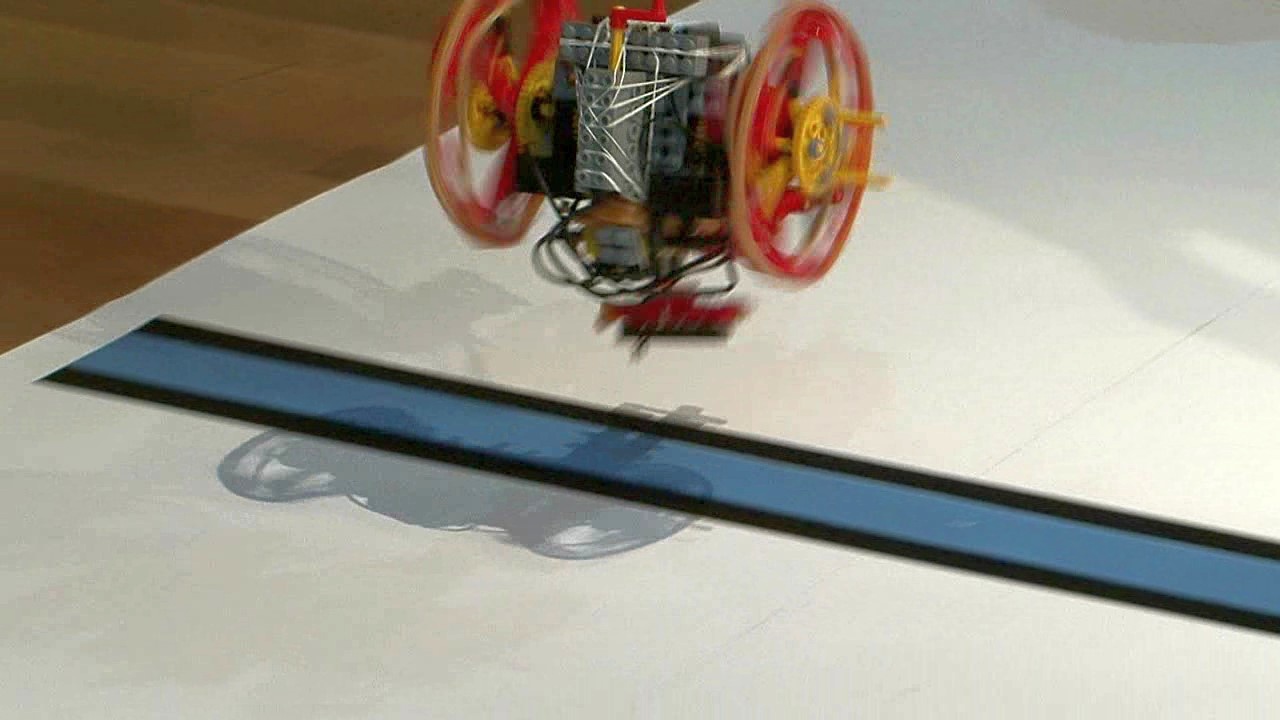
‐ミドル : 2m折り返し走行+パイロット置き去り
http://robocobo.sakura.ne.jp/blog/contest/race2021-mid.pdf
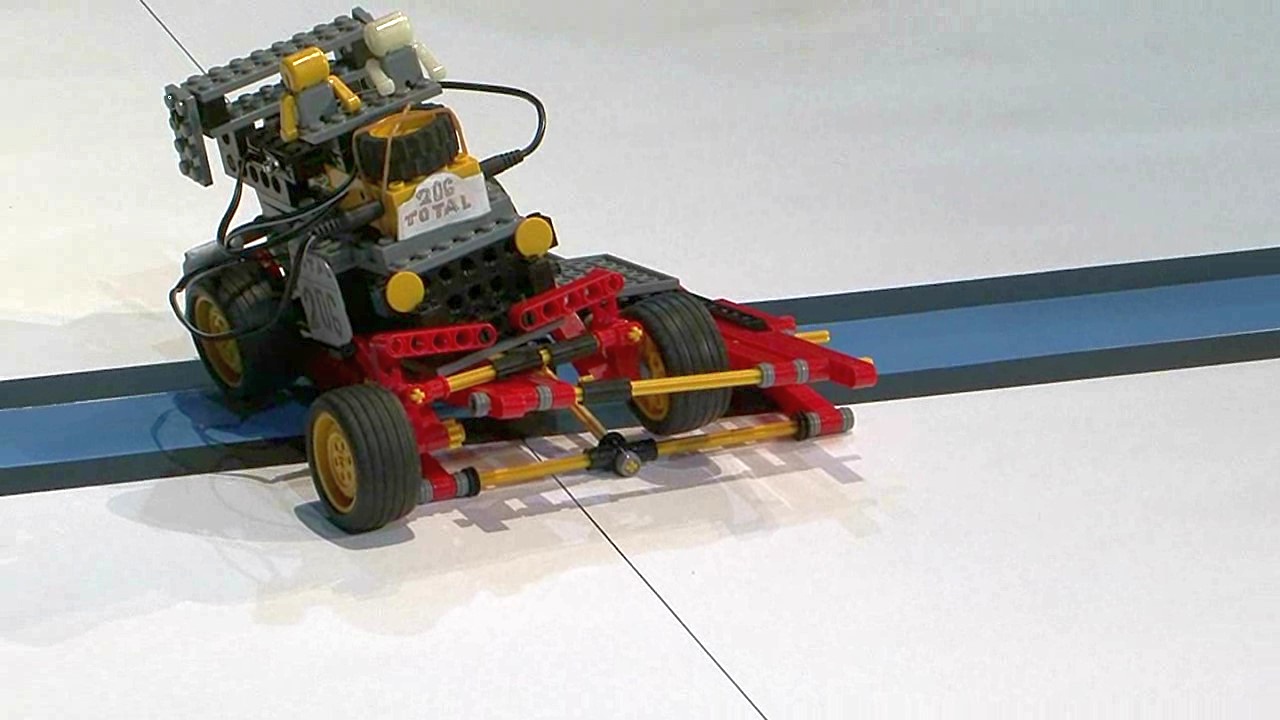
‐アドバンス: 2mコース走行+パイロット直立配置
http://robocobo.sakura.ne.jp/blog/contest/race2021-adv.pdf
【対象(目安)】
‐プライマリ: 4月時点プライマリ生、~小3ベーシック生
‐ベーシック: 4月時点ベーシック生、~小4ミドル生
‐ミドル : 4月時点ミドル生、~小5アドバンス生
‐アドバンス: 5月時点アドバンス生、修了生、プロ生
【費用】
‐6・7月授業料: 通常分(修了生の方は9,900円/月)
‐延長指導料 : 550円/回(可能な授業日を都度ご案内)
‐予行練習会 : 7/22…1コマ2,200円※ 7/23…3,300円※
‐大会エントリ: 6,600円(早割5,500円)※
※弟妹は1,100円引き
【表彰】
‐各コース1~3位表彰の他、景品授与
【申込‐大会】
‐定員(60名)まで先着順
‐~6/20(日)まで早割1,100円引き
‐キャンセル料は6/21~30%、7/1~50%、7/15~80%
【申込‐練習会】
‐定員・直前まで受付
‐満席時は受入を検討しますので「キャンセル待ち」予約下さい
‐キャンセル料は7/21(水) 0:00~100%
【申込方法】
‐本メール記載の条件に同意の上、全て下記予約サイトより登録下さい
使いにくいですが…「すべてのメニュー」のまま7/22-23の週までめくって下さい
《予約サイト》 https://airrsv.net/robocobo/calendar
【徴収方法】
9月分月謝に加算して頂戴します
【中止・変更時】
‐情勢により開催できない場合は、各教室での成績を集計し、表彰・景品授与を予定します
(この場合、大会エントリ料を3,300円、割引・キャンセル0円とします)
‐中止した練習会または大会費用は徴収しませんが、授業料・指導料は返金できません
‐日程・会場・料金が変更になる場合はご予約を返上し、改めて募集します
2) ロボット教室オンラインサービス
アカウント登録すると、毎月のロボットの製作手順を動画で見られるロボット教室オンラインサービスが利用できます。
テキストでは分かりにくい箇所や遊び方などもご覧になれますので、ご活用下さい。
(休会月は利用できません)
《オンラインサービスご案内PDF》
http://robocobo.sakura.ne.jp/blog/net/RobotOnlineService.pdf
《アカウント登録URL (PDF記載QRコード)》
https://form.kintoneapp.com/public/form/show/00008e877a90d5dc03472c81611b94849f6b451581adb93b4b1e993b3fdb7b86
3) 4月課題 高得点者 []内は教室と学年
◆プライマリ【15名平均 図形4.1】
5点…中川[中間2], 藤井[中間2], 翁[小倉北2], 土屋[小倉北1], 藤原[八幡東1], 有松[小倉南2], 古場[小倉南2], 眞所[小倉南2], 矢野 [小倉南2]
◆ベーシック【21名平均 図面2.2+設問2.3=4.5】
10点…なし
9点…なし
8点…柴田[小倉北4], 渡辺[小倉南4]
7点…江藤[小倉南3]
6点…一ノ木戸[小倉南5]
◆ミドル【14名平均 図面3.1+設問1.2=4.4】
10点…なし
9点…なし
8点…なし
7点…林田[小倉南4]
6点…中村[東福間6], 千葉[中間6], 中村[小倉北7], 武田[八幡東5]
6. コロナ問題の理解 その2
■コロナ閑話
http://robocobo.sakura.ne.jp/blog/CoronaOpinion'210531.pdf
東福間・中間・小倉北教室 佐藤 / 八幡東・小倉南教室 中野