2.4月の課題
3.3月の解答
4.今後の授業スケジュール
5.お知らせ
6.コロナ問題の理解 その1
1. 4月授業内容
1.0 <スタートアップ(全コース)>
割愛します。
1.1 <プライマリーコース『ロビット』>
割愛します。
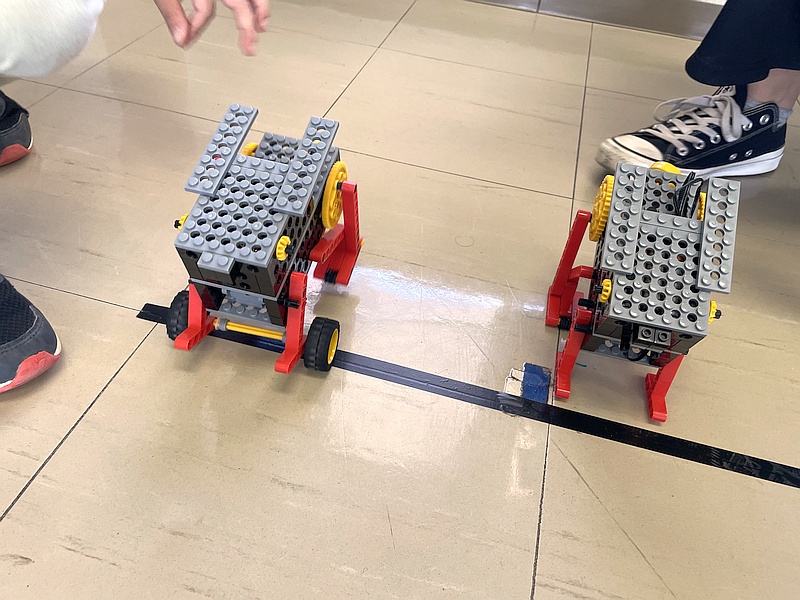

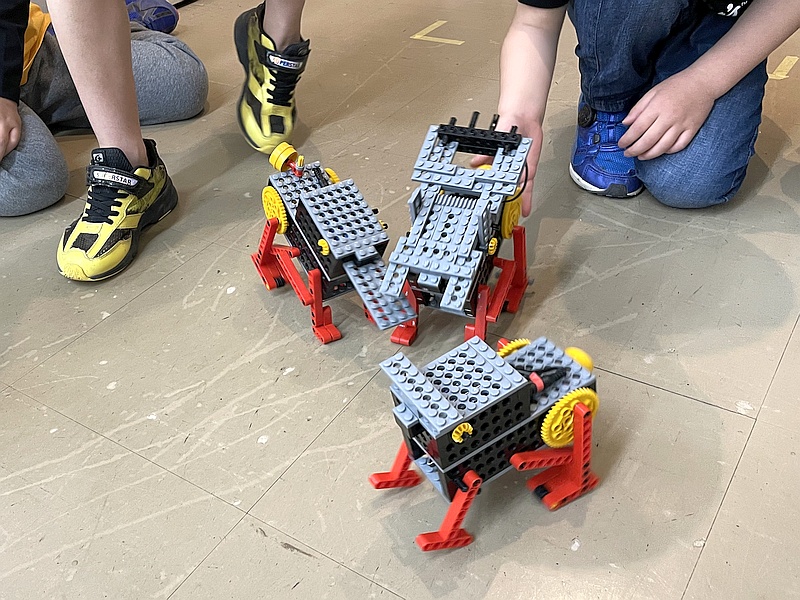

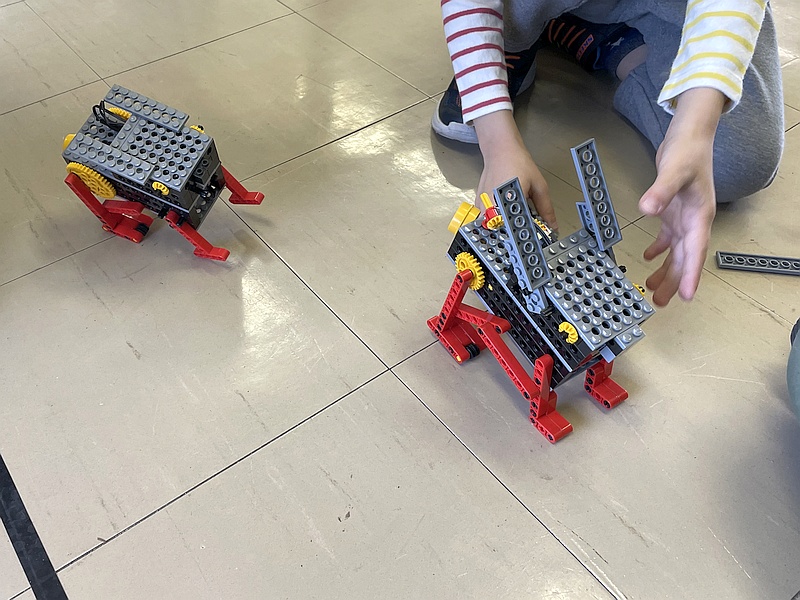
1.2 <ベーシックコース『ケンドーロボ』>
文字通り、剣道のように竹刀(しない)を振るロボットです。
剣道には、ここぞという時に、前進と「面!」の2つの俊敏(しゅんびん)な動きが必要です。
1日目では、モーターで左右両輪を駆動(くどう)し、前進・後退(こうたい)できるようにしましたが、竹刀は手動で前後に振り動かせるだけです。
竹刀を自動的に振るには、動力源と動作タイミングを与えなくてはなりません。
2日目に解決します。

動力源として、モーターを前進に利用してしまっているため、輪ゴム(の弾性力=だんせいりょく)を利用します。
前面に引っかけた輪ゴムが、竹刀を後方へ振り構(かま)えるにつれ引っぱられます。
動作タイミングとしては、背後(はいご)に振り構えた竹刀を振り下ろさないよう固定するロックが、相手にぶつかった衝撃(しょうげき)を検知して外れるよう、ロック部品と一体化してスライドするバンパーを前部に取り付けました。
衝突して押しこまれるバンパーを利用する点が、昨年9月の『う王さ王』と似ていますね。
 このロックがうまく外れるための工夫が設計されています。それは“スピード”です。
このロックがうまく外れるための工夫が設計されています。それは“スピード”です。スピードがあればこそ、ぶつかった衝撃が大きくなり、ちゃんと検知できるのです。
だから、今回のロボットはちょろちょろと速く走り、捕(つか)まえるのが大変ではありませんでしたか?
設計上の違いは、モーター軸(じく)に取り付けるのがいつものピニオンギアではなく、もっと大きなギアMでしたね。
こうして(ギアMがギアMを回して)モーターの回転数を落とさずにタイヤに伝え、速く走らせていたのです(*1)。
 最後の競技は「一本!」勝負。早く竹刀を振り下ろし、相手に当てた方が勝ちです。
最後の競技は「一本!」勝負。早く竹刀を振り下ろし、相手に当てた方が勝ちです。バンパーを長くして早めに相手を検知し、それ以上に竹刀を長くしてリーチを伸(の)ばすことも一つの指針ですが(*2)、あまり欲ばると重くなって、動作にキレがなくなりましたね。
案外、ノーマル仕様の小柄(こがら)なボディの方が、体格のいい先輩たちを打ち負かします。
 なお、ケンドーロボ同士を対面させて、いざ取り組もうと発進させても、まっすぐ進まずに相手を打てないと悩むことがありました。
なお、ケンドーロボ同士を対面させて、いざ取り組もうと発進させても、まっすぐ進まずに相手を打てないと悩むことがありました。左右のタイヤは同一シャフトで直結しており、必ず等しく回転するので(*3)、一旦走り出した後はほぼ直進するのですが、最初の急加速する瞬間は、大きな力(タイヤのグリップ力)が地面にかかり、摩擦(まさつ)や重心バランスの関係で、どちらかのタイヤが多めにスリップしてしまうことが原因です。

底にパーツを付けて、摩擦やスリップのバランスを取ることで直進したり、あえてバランスを崩(くず)すことで曲がったりするようにも調整できましたね。
剣道家には見えなくなりますが、直進させるのに最も確実なのは、3輪や4輪車にするアイデアでした。


*1 同じ大きさのギア同士は、回転速度が同じに保たれます。このことを「減速しない」と言います。昨年9月の『う王さ王』の改造例としても紹介しました。
*2 自分と相手のバンパーが当たるようだと、相手からも早く検知されるので、相手と高さを変えない限り、あまり有利とは言えません。
*3 モーター直結のギアが右タイヤを先に回していることが曲がる原因と分析する人もいましたが、そうではなく、左右のグリップ力のバランスがとれていない(完全にとるのが難しい)せいです。
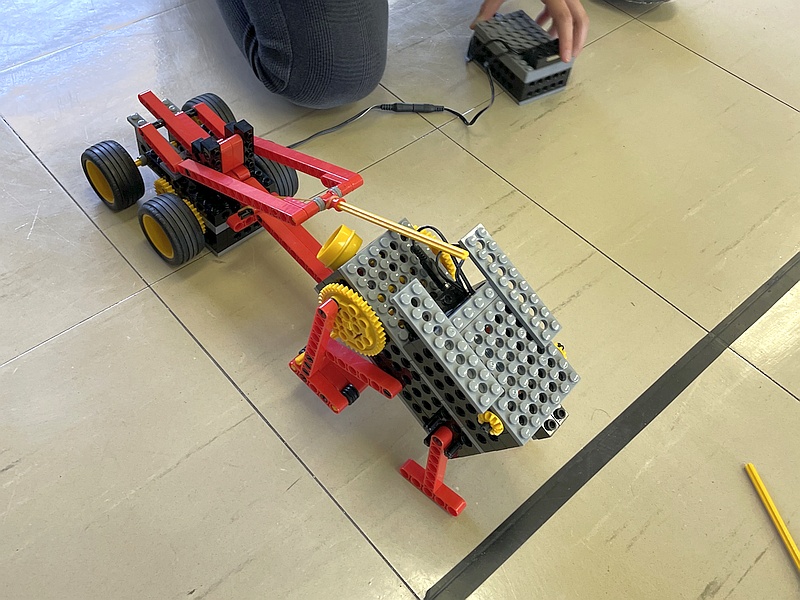
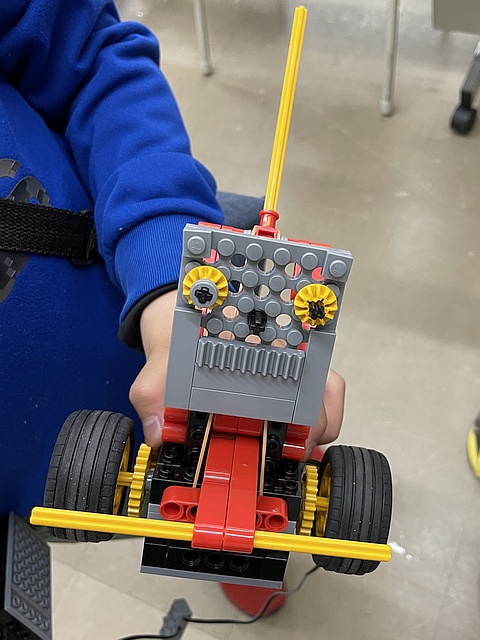
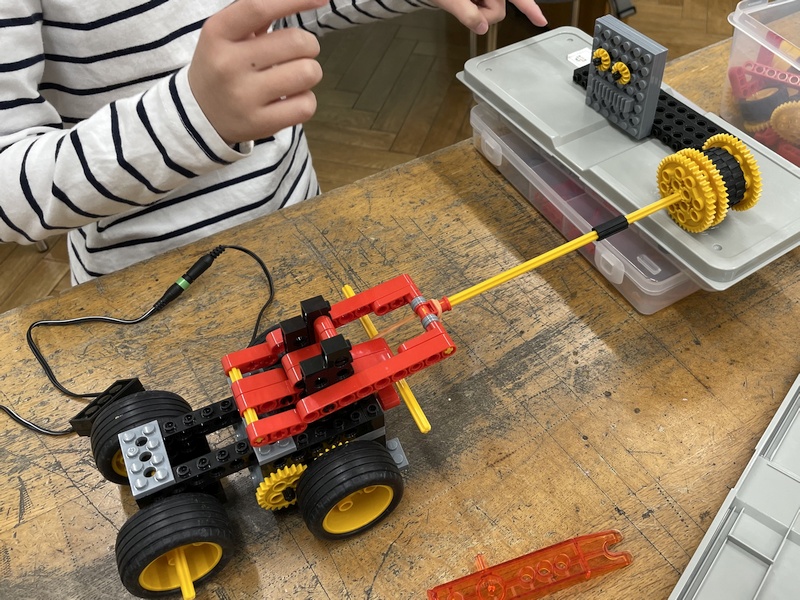
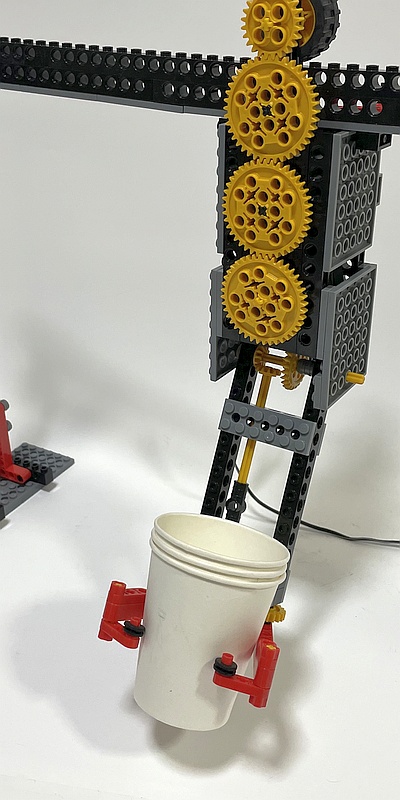
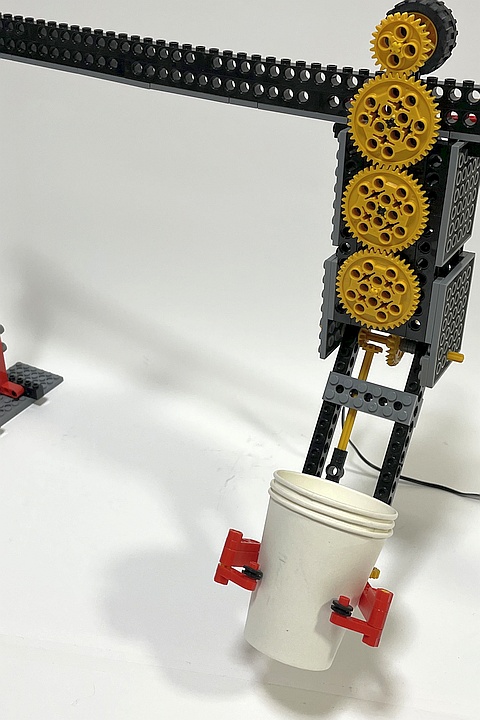
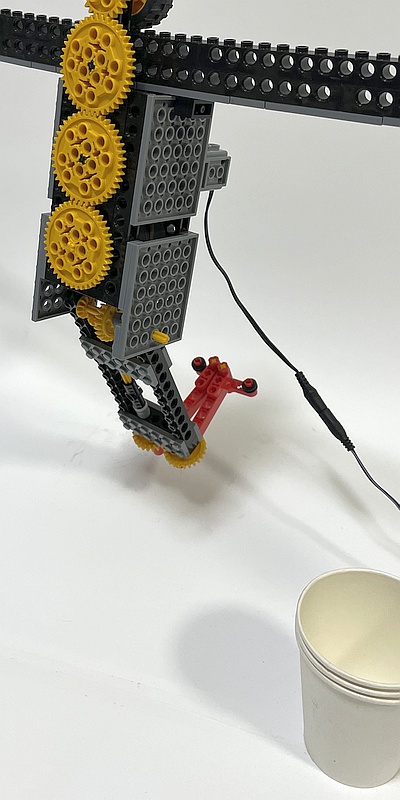
1.3 <ミドルコース『ロボキャッチ』>
1月~6月まで追加された新作テーマの第四弾!
 第9回アイデアコンテスト全国大会(2019年)MVP賞作品(当時小3)がベースの、クレーンゲーム型ロボットです。
第9回アイデアコンテスト全国大会(2019年)MVP賞作品(当時小3)がベースの、クレーンゲーム型ロボットです。UFOキャッチャーを彷彿(ほうふつ)とさせる見た目からもワクワクするテーマですね。
ミドルコースの傑作(けっさく)選に加えましょう。
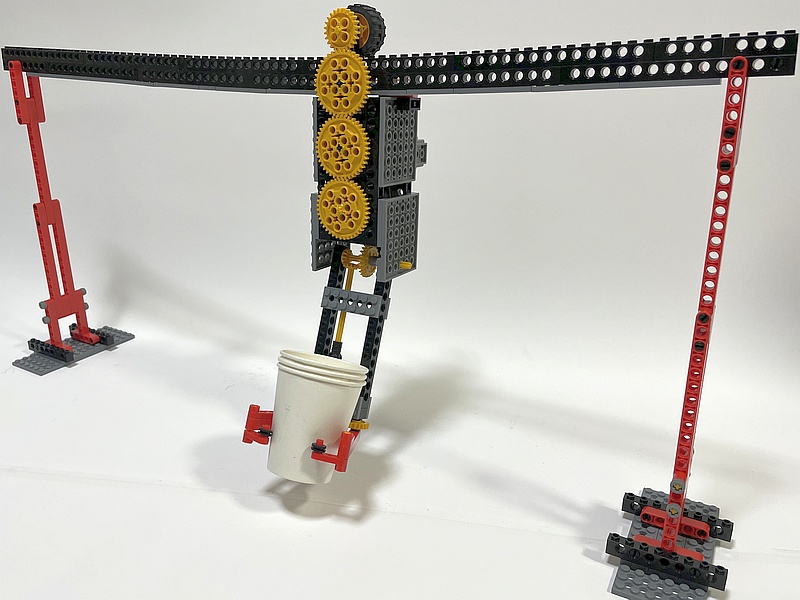
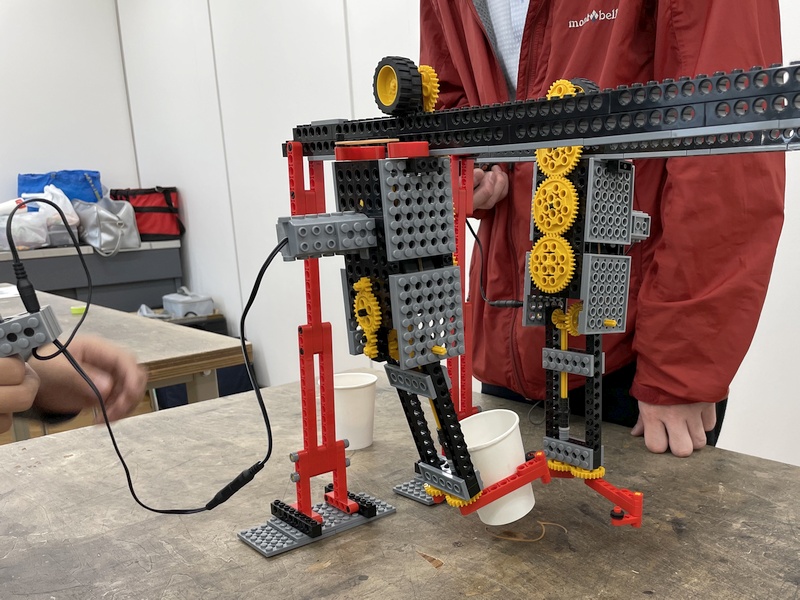
しかし、このゲームには、ハンドを閉じて景品をキャッチし、引きずらないように持ち上げ、目標位置まで水平移動する3つの動作が必要です。
その後、景品を下ろし、ハンドを開いて放し、次の景品に向かって戻る動作も必要です。
これをミドルコースで、モーター1個で、掴(つか)んだり、持ち上げたり、移動したり、どうやって実現できたのでしょうか?
これには、2020年9月の『ロボアーム』と同じ動作原理が使われています。
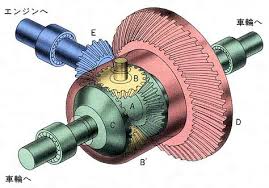 一言で言えば「差動装置」であり、特にギアを使った装置をディファレンシャル・ギア(differential gear=差動歯車)と呼びます。
一言で言えば「差動装置」であり、特にギアを使った装置をディファレンシャル・ギア(differential gear=差動歯車)と呼びます。ディファレンシャル・ギアとして最も有名なのが自動車の駆動軸に用いられるもので、通称「デフ」と呼ばれます(*1)。
これは、左右両輪の駆動軸(一般車は前輪、高級車・スポーツカーは後輪、一部は前後輪とも)の中央付近に設けられ、
カーブを曲がる時などに左右の回転数の差を許容しながらも、1つしかないエンジン/モーターの回転を絶えず分配するために使われています。
『ロボキャッチ』では正に、このデフを模した機構を腐心(ふしん)して作り上げており、先生たちをも感嘆させました。
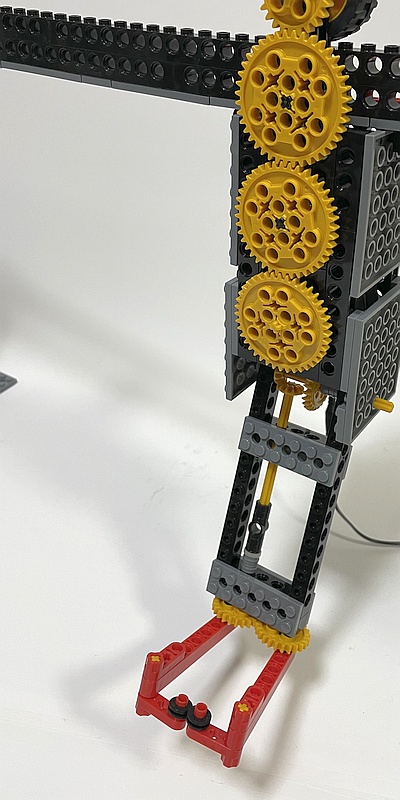
テキストp.7で、マイタギア4枚を対向させて組み上げたギアボックス“自体”を、裏返したタイヤLゴムで包んで回せるようにしています。
 このような構造にすると、左右2本の出力軸(シャフト4ポチ)が無負荷(空回り)または等しい負荷(自動車の直進)の時には、中心のギアボックスと一体的に回るだけで、単に1本のシャフトで左右の回転軸を直結した(デフロック)状態と変わりませんが、
このような構造にすると、左右2本の出力軸(シャフト4ポチ)が無負荷(空回り)または等しい負荷(自動車の直進)の時には、中心のギアボックスと一体的に回るだけで、単に1本のシャフトで左右の回転軸を直結した(デフロック)状態と変わりませんが、ひとたび負荷に差が生じる(片側の回転が重い/カーブを曲がる)と、左右の回転数が異なってきます。
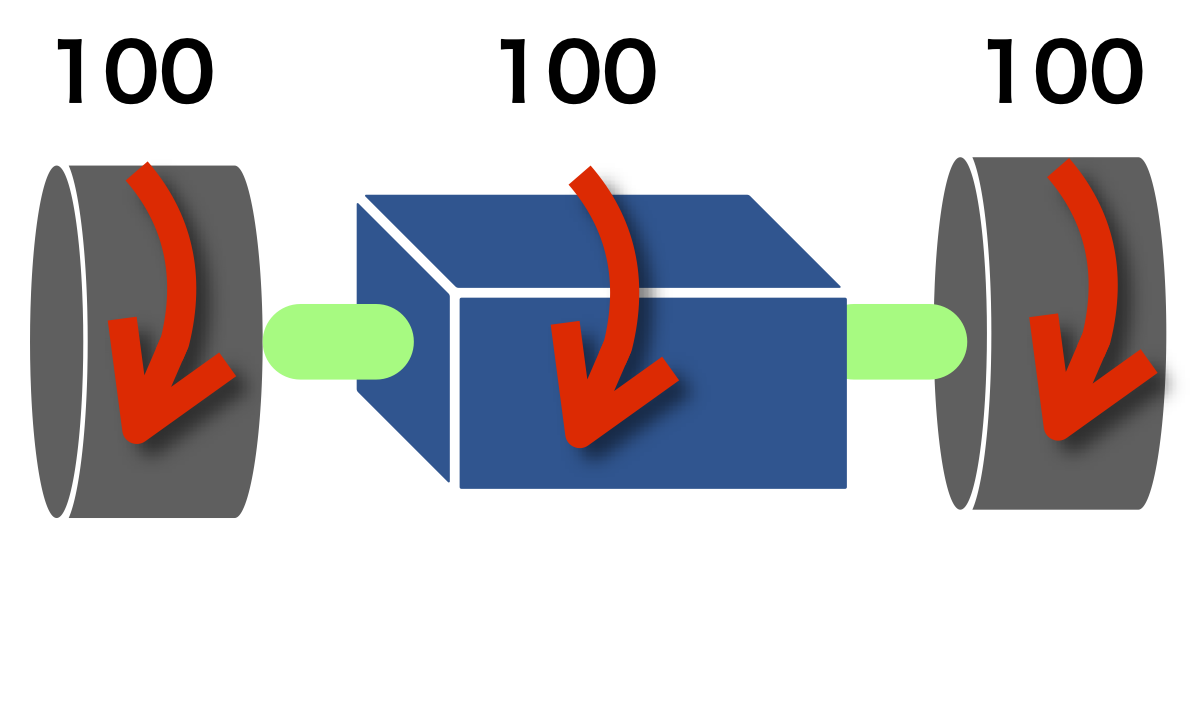
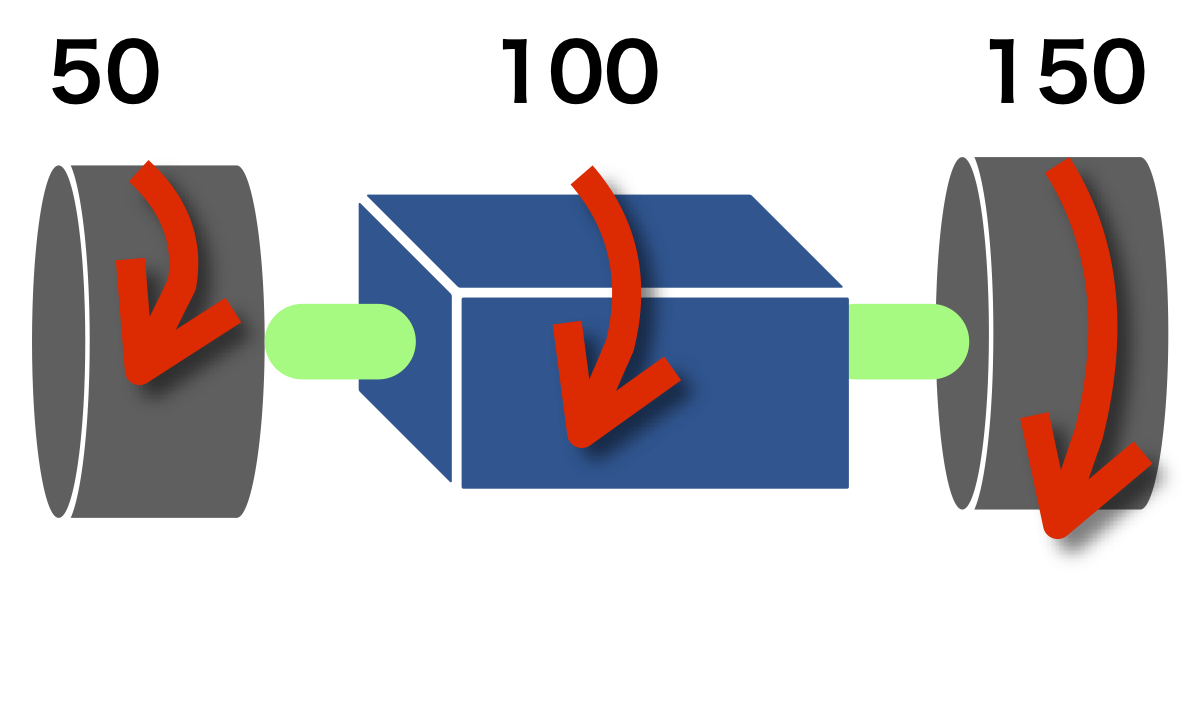
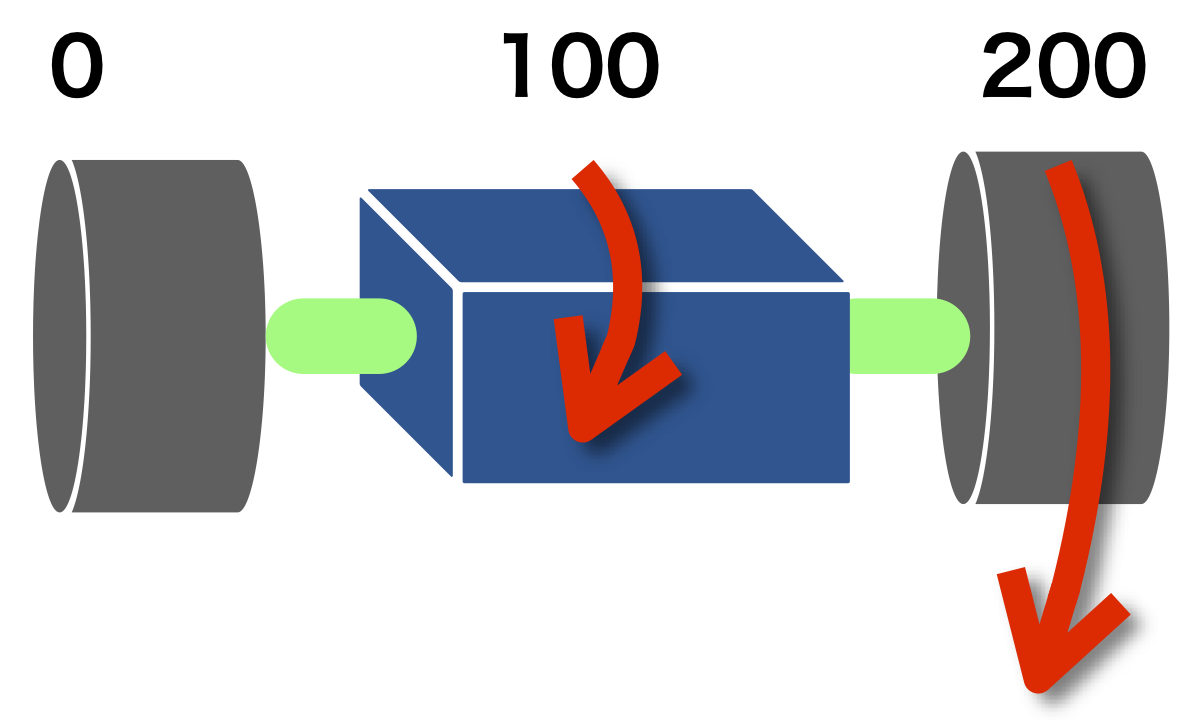
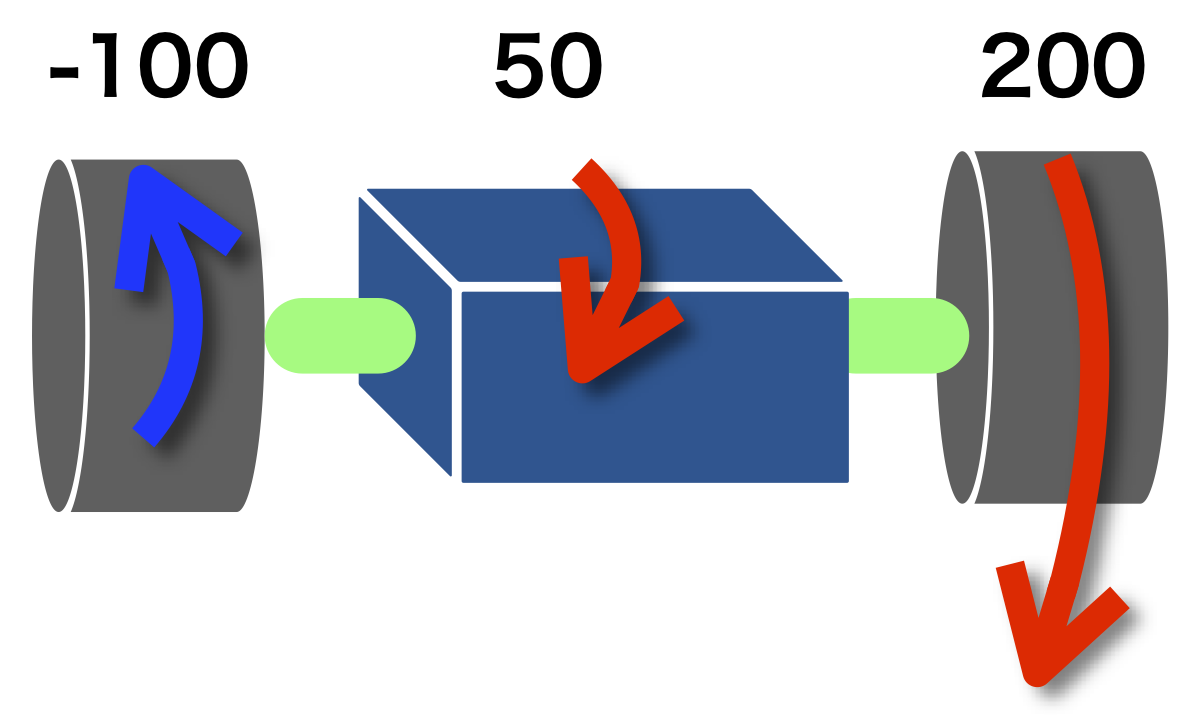
このとき、回転数の比〔左軸:デフ:右軸〕は、デフロック状態を 100:100:100 とすると、
50:100:150 になったり、0:100:200 になったり、-100:50:200 になったりと、〔左軸 + 右軸 = デフ×2〕の関係になります。
つまり、エンジン/モーターでデフを定速回転させている時、左軸が +20 だけ変化すれば、右軸が -20 だけ変化し、その結果が逆回転になってもお構いなしです。
「差動装置」と呼ばれる所以(ゆえん)です。
なぜそうなるかは、デフをゆっくり手で回して観察すれば分かるでしょう。
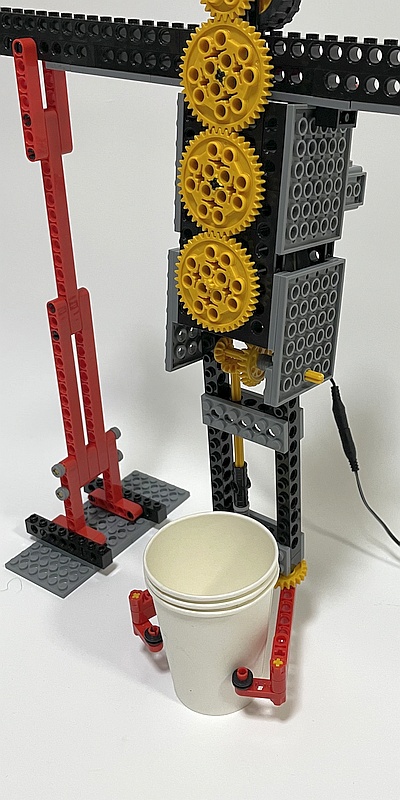
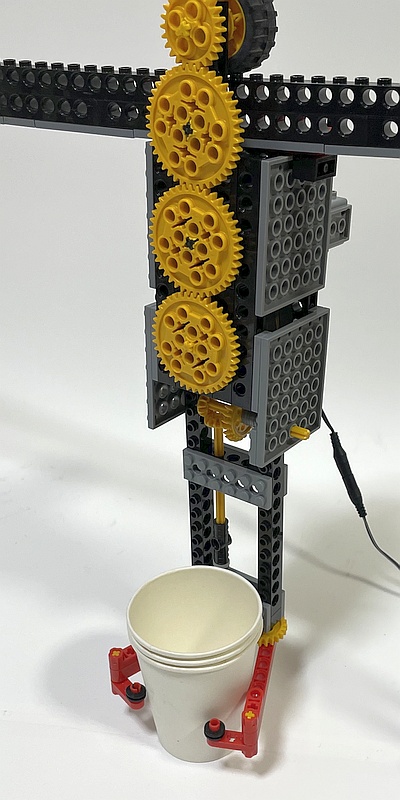
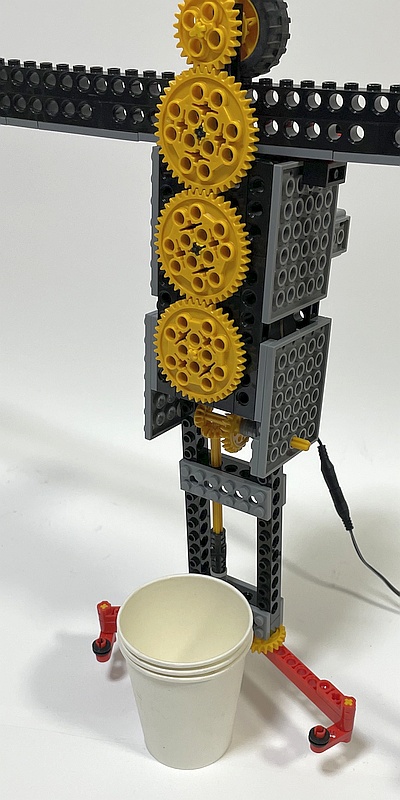
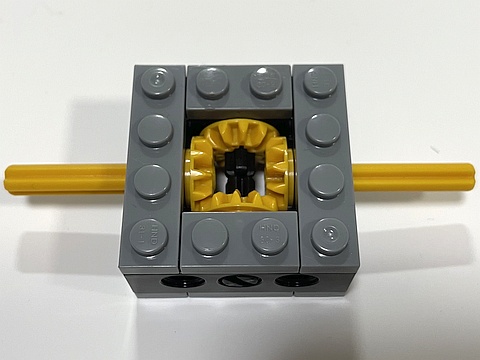
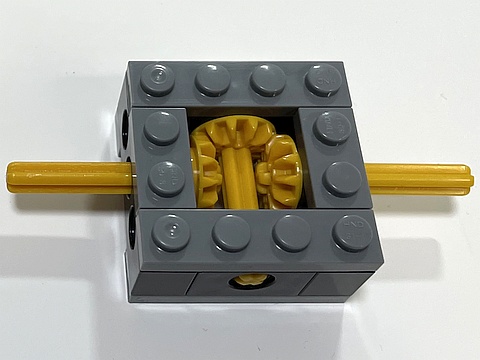 パーツによっては、マイタギア4枚で組むと回転が固くなる場合がありますので、
パーツによっては、マイタギア4枚で組むと回転が固くなる場合がありますので、写真のように3枚でコの字に組み、シャフトペグ2本を対向させる代わりにシャフト4ポチを通すとスムーズになります。
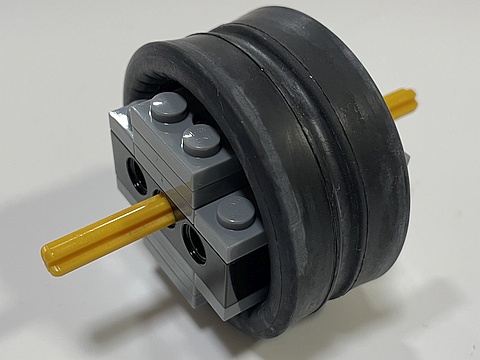
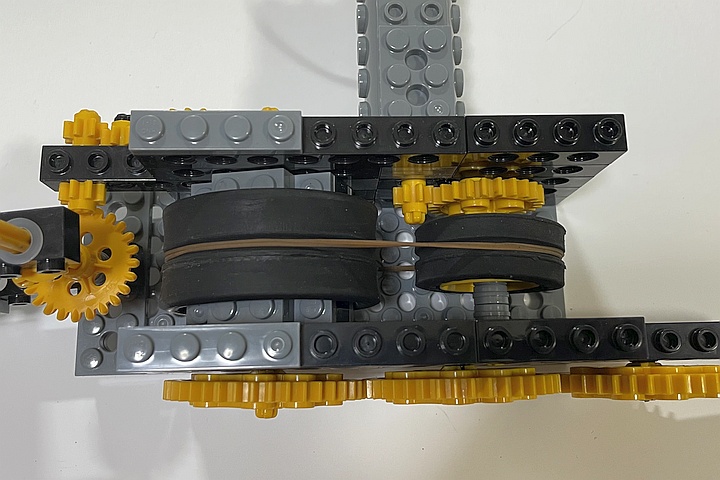 パーツ形状の限界から、デフへの入力として自動車同様のシャフトドライブは採用できなかったため、輪ゴムによるベルトドライブを編み出しています。
パーツ形状の限界から、デフへの入力として自動車同様のシャフトドライブは採用できなかったため、輪ゴムによるベルトドライブを編み出しています。 タイヤLとSのゴムを裏返してできる溝に輪ゴムを掛けて伝達するあたり、小型車のトランスミッション(CVT=無段変速機)に多く採用されている金属ベルトドライブに似ており、これも自動車っぽいマニアックな機構です。
タイヤLとSのゴムを裏返してできる溝に輪ゴムを掛けて伝達するあたり、小型車のトランスミッション(CVT=無段変速機)に多く採用されている金属ベルトドライブに似ており、これも自動車っぽいマニアックな機構です。では、なぜ、『ロボキャッチ』に差動装置が必要だったのでしょうか?
それは、モーターが回転し続けたまま、アーム/ハンド操作と水平移動に動力を振り分けるためです。
モーターにとっては「回せるならどっちが回っても構わない」リンク構造になっています。
力学的には、中心のマイタギアを介した「作用・反作用の法則」により、どちらにも同じ回転力(トルク)で出力されますが、その結果として、“楽に”回せる方が(多く)回ります(*2)。
アームの上げ下げとハンドの開閉もまた、マイタギア同士による差動装置になっています。
つまり、マイタギア同士が噛み合って回転を伝える(ハンドを開閉する)のか、
または、もう互いに回せなくなったマイタギア同士が一体となって一緒くたに回転する(アームを上げ下げする)のか、
楽な方の動きが選択されます。
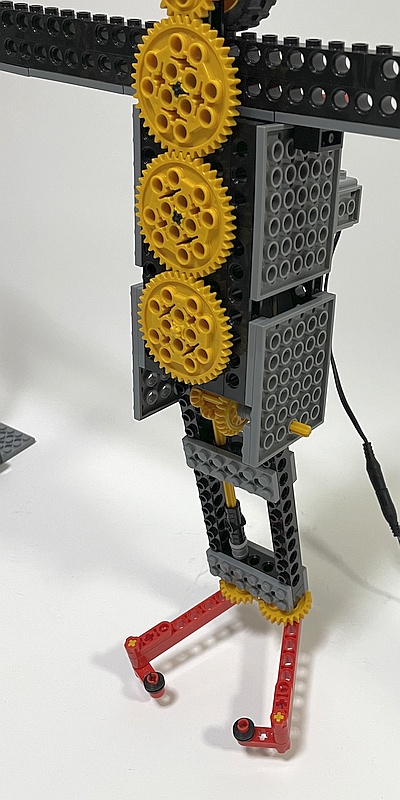
かくして、スイッチを入れると、
1) ハンドが物を掴(つか)む
2) アームを少し持ち上げる
3) アーム全体が移動する
の順に作動します。
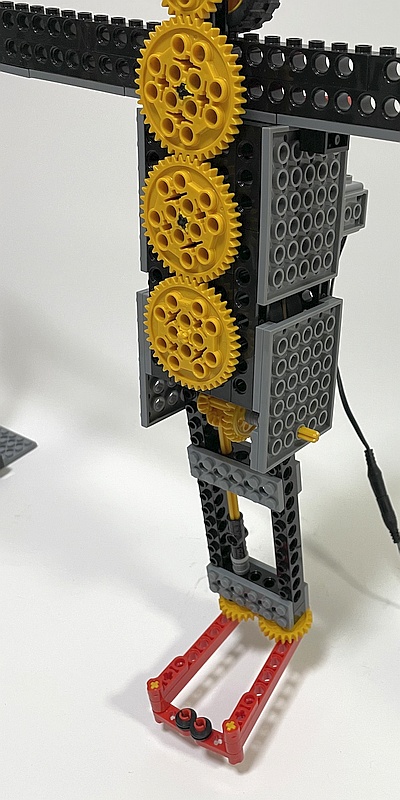
所望の位置で止め、今度はスイッチを反転させると、先程の逆順ではなく、
4) 先ずはアームを垂(た)らし、
5) ハンドを開いて荷物を離し、
6) アーム全体を逆方向へ移動する
という一連のクレーン操作を滞(とどこお)りなくこなすのです。
スイッチを入れている間、モーターはずっと一方向に回り続けているだけです。
動作が切り替わるのは、動ける限界の位置に達した(ハンドを閉じ終わる)時や、動きが重くなった(アームを持ち上げて重力がきつい)時です。
マイコンも使わず、機械だけでこんなことができるのですね。
プログラミングにより、スタートして強制的に移動するクレーンを声に反応させて停止した後、モーターを逆転することで景品を掴み、戻って来させるUFOキャッチャーさながらのゲーム性もナイスです。



*1 ウィキペディア「差動装置」
https://ja.wikipedia.org/wiki/%E5%B7%AE%E5%8B%95%E8%A3%85%E7%BD%AE
*2 自動車のデフも同じで、これが裏目に出る場合があります。
その典型が雪道や泥沼での“スタック”で、一方のタイヤが滑りやすい路面で空転し始めると、(その方が楽なので)反対側のタイヤに駆動力が伝わらなくなり、その場から抜け出せなくなります。
この欠点を回避するため、「デフロック」や「リミテッド・スリップ・デフ=LSD」と呼ばれる追加機構が装備された車両もあります。
1.4 <アドバンスコース『九九ボックス①』>
電卓も100円ショップで買えて、計算マシンなんて大した価値が無いように思える現代ですが、
コンピュータが世に出回る前、大まじめに複雑な機械式計算機が開発され、高価で販売されていた時代が確かにありました。
『九九ボックス』の計算方式は、回転による足し算がベースという点で、
手回し計算機(日本では「タイガー計算機」が有名)および、
それをモーター駆動化した「モンロー(電動)計算機」を想起させます。
ここは、文章よりも、興味深いYouTube動画で歴史遺産を学びましょう。
■計算機の歴史
【題名】サイエンス・ピックアップ(8) 計算機の歴史から技術の進歩をたどる~東京理科大学近代科学資料館~
【動画】https://www.youtube.com/watch?v=mP8P2wKCujM
【内容】
東京理科大学にある近代資料館の紹介動画です。
ここには、人類が計算を工夫して行うために作ってきた道具が展示してあります。
数を数えるための石ころに始まり、そろばん、計算尺、タイガー計算機、初期の電卓、その他大型計算機などが紹介してあります。
(手回し計算の体験ができますので、一度訪れてみたいものです)
■手回し計算器の実演
【題名】タイガー機械式計算器
【動画】https://www.youtube.com/watch?v=2aHdInr9_J8
【内容】
タイガー計算器の実演動画です。
ダイアルをセットして右側のハンドルを回すと表示部に答えが現れます。
ハンドルを回して、ガリガリという動作音と共に答えが表示される様子は、現代の計算器にはない趣(おもむき)です。
■電動計算機の実演
【題名】モンロー計算機 完全マスター Monroe calculator 6N-212
【動画】https://www.youtube.com/watch?v=8WJk8rQse-I
【内容】
モーターにより全自動化したモンロー計算機の実演動画です。
数値入力はボタン式になっており、操作性や計算速度が向上しています。
モータにより各部が動く様子は見ていて飽きません。
このように複雑な計算を機械部品のみで実現できたことに驚きます。
■タイガー計算機についての詳しい解説動画
【題名】学芸員の展示場ガイド「計算機 Part 3」@大阪市立科学館
【動画】https://www.youtube.com/watch?v=nGAYWAm6QB0
【内容】タイガー計算機の計算方法
【題名】Nippon Calculator HL 21
【動画】https://www.youtube.com/watch?v=A6l53sQ50f0
【内容】機械式計算機の内部が動く様子
■いろいろな計算機器
【題名】学芸員の展示場ガイド「計算機 Part 1」@大阪市立科学館
【動画】https://www.youtube.com/watch?v=wrRJO0BRzfU
【内容】ダイヤル式加減算器とキー式1桁加算器
【題名】学芸員の展示場ガイド「計算機 Part 2」@大阪市立科学館
【動画】https://www.youtube.com/watch?v=at9KqMInPZ8
【内容】スライド式加減算器
【題名】学芸員の展示場ガイド「計算機 Part 4」@大阪市立科学館
【動画】https://www.youtube.com/watch?v=O10iuSTlODs
【内容】キーボード式計算器
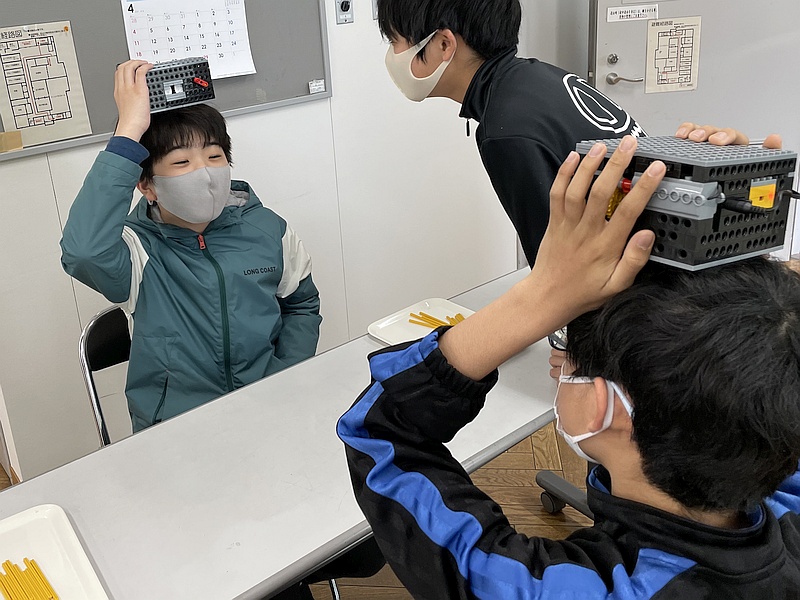
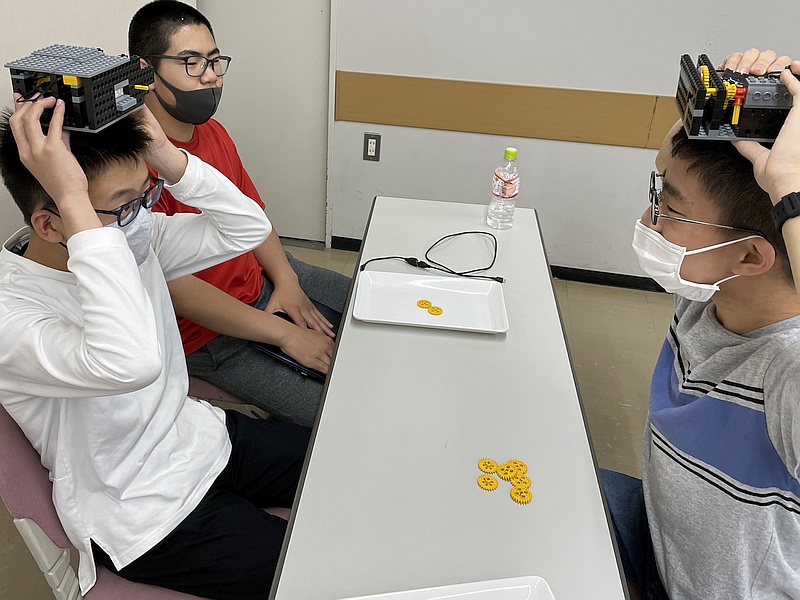
1.5 <プロ1年目コース『オムニホイールロボット①』>
春タームとして、オムニホイール(Omnidirectional Wheel;全方向車輪)ロボットを製作し、リモコン操縦するまでの1ヶ月目の授業です。
1日目は製作です。
2層の円形ボードにモーター、オムニホイール、マイコンボード、無線モジュール、電池ボックスを組み付け、配線コネクタを差し込んでいきます。
殆どの作業がネジ留めですが、組み付ける順番の解決と、手先の器用さが要求されます。
日常において、あまり経験しない作業なので、悩みながらもパズルのようで楽しかったのではないでしょうか。
パソコンからサンプルプログラムを転送し、3つのホイールを指示通りの速さ・向きに回せることを確認して終了しました。
 2日目に、ゲームパッド(プレステ用と同等!)と無線通信リンクを確立し、パソコンからラジコンプログラムを転送すると、アナログスティック(*1)を倒した分だけの速さで前後左右に移動することを確認しました。
2日目に、ゲームパッド(プレステ用と同等!)と無線通信リンクを確立し、パソコンからラジコンプログラムを転送すると、アナログスティック(*1)を倒した分だけの速さで前後左右に移動することを確認しました。また、調整用プログラムを転送してロボットの動きを観察し、個体差(重心やホイールの摩擦力の違い)による進行方向のズレを補正するための調整値(*2)を割り出しましたが、これは今回の学習テーマの本質ではありませんので、あまり気にしなくて良いです。
どのスティックをどれだけ倒したか、どのボタンを押したかにより、ロボット(3つのモーター)をどの向き(電流の+-)にどれくらいの速さ(電圧)で動かすかは、全てあなた(プログラム)が決めることです。
マイコンは、得意な計算・判断だけを、あなたに代わってあなたが決めたルール通りに素早く実行し、各部品に必要な命令(数値による指示)を間違いなく出してくれる便利な道具と考えてください。
オムニホイールの特徴は、黒い樽型ローラーの作用により、普通のタイヤとしての進行方向(回転方向)とは垂直の横方向(ホイールの回転軸方向)にズルズルっと滑ることです。
このホイールが120°間隔で3つ装着されることにより、自由自在に移動・旋回できそうなことは分かりましたが、これを力学的・数学的にどのように捉え、プログラム上の数値にどのように反映すべきかについては、次回で学びます。
*1 アナログ(連続量)はデジタル(離散量)の対義語ですが、アナログスティックは、倒した向き・強さを -128 ~ 127 など、マイコンが扱いやすい整数(とびとびの値=離散量)に変換しているため、厳密にはデジタル式なのですが、ON/OFF判定だけの○×△□ボタンと違って、最小値~最大値を十分細かく刻んで表しているため、人間には滑らかな連続量で制御しているように感じられます。
*2 プログラム上の調整値“0.9f”などは、数学でいう実数(連続量)に相当し、細かな小数で計算するための拡張された表現方法ですが、これもマイコン内部で扱う以上、厳密にはデジタル値(離散量)です。
2. 4月の課題
<スタートアップ(全コース)>
特にありません
<プライマリーコース>
- オリジナル図形プリント
http://robocobo.sakura.ne.jp/blog/HW/RobotP2104-Q.pdf
<ベーシックコース>
- 上記授業内容を精読する(概ね3年生以上/低学年は補助の下で)
- オリジナル課題プリント(3面図+設問)
http://robocobo.sakura.ne.jp/blog/HW/RobotB2104-Q.pdf
<ミドルコース>
- 上記授業内容を精読する
- オリジナル課題プリント(3面図+設問)
http://robocobo.sakura.ne.jp/blog/HW/RobotM2104-Q.pdf
<アドバンスコース>
- 上記授業内容に紹介した動画(YouTube)を視聴する
- オリジナル課題プリント(見取図+設問)
http://robocobo.sakura.ne.jp/blog/HW/RobotA2104-Q.pdf (来月まで分)
<プロ1年目コース>
- 上記授業内容を精読する(該当テキストページを見ながら)
3. 3月の解答
<プライマリーコース>
http://robocobo.sakura.ne.jp/blog/HW/RobotP2103-A.pdf
<ベーシックコース>
http://robocobo.sakura.ne.jp/blog/HW/RobotB2103-A.pdf
<ミドルコース>
http://robocobo.sakura.ne.jp/blog/HW/RobotM2103-A.pdf
<アドバンスコース>
http://robocobo.sakura.ne.jp/blog/HW/RobotA2102-A.pdf
4. 今後の授業スケジュール
◆5月は一週ずつ遅れます。
◆【真鶴会館】小倉北区真鶴1-5-15(施設駐車場あり)
◆【折尾商連会館】八幡西区折尾3-1-32(施設駐車場なし)
――――――――――【佐藤教室長】――――――――――
[東福間]第1・3土原則<学習ルームでこぼこ>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドバンス
⇒ 5/8, 22, 6/5, 19, 7/3, 17
[中間]第2・4土原則<なかまハーモニーホール>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドバンス/ロボプロ
⇒5/15※第1回 【折尾商連会館】2F
5/29※第2回 【折尾商連会館】2F
6/12, 26, 7/10, 24
※ハーモニーホール閉鎖につき【折尾商連会館】で開催します
[小倉北]第1・3日原則<ムーブ>
- 10:30~ ベーシック/プライマリ
- 13:00~ ミドル/ロボプロ
- 15:00~ アドバンス
⇒5/ 9 第1回 5F小セミ
5/23※第2回 北九州総合労働会館【真鶴会館】4F
6/6, 20, 7/4, 18
※ムーブ閉鎖につき【真鶴会館】で開催します
――――――――――【中野教室長】――――――――――
[八幡東]第1・3土原則<レインボープラザ4F>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドバンス
⇒ 5/8, 22, 6/5, 19, 7/3, 17
[小倉南]第2・4日原則<総合農事センター2F>
- 10:30~ ベーシック/プライマリ
- 13:00~ ミドル
- 15:00~ アドバンス
⇒5/16※第1回 北九州総合労働会館【真鶴会館】4F
5/30※第2回 北九州総合労働会館【真鶴会館】4F
6/13, 27, 7/11, 25
※農事センター閉鎖につき【真鶴会館】で開催します
5. お知らせ
1) ロボプロ全国大会4/25(日)の延期全国から2部門13名が選出され、4/25(日)オンライン開催予定でした。
■テーマ部門「おうち時間を楽しく/便利にしてくれる作品」9名
■フリー部門「技術力やアイデアの奇抜さを競う自由作品」4名
うち九州から唯一、山本蒼也君(中間教室 中3)がフリー部門で選出されています。
作品名『ダンシング・チンアナゴ』

夏頃を予定しておりますが、開催日・追加応募は未定です。
https://kids.athuman.com/robo/event/convention/rp2021/
ロボプロ全国大会の様子は、過去のダイジェスト動画をご覧下さい。
第1回(2017年) https://youtu.be/j_2t1B8ic3g
第2回(2018年) https://youtu.be/51SNvvL4ubk
第3回(2019年) https://youtu.be/yLzbbIeQniM
2) 明るさセンサー式LED常夜灯はんだ付け講座 終了
4/29(木・祝)北九州パレスにて、4組の方に参加頂きました。

初めてのはんだ付けで、300℃で熔けたドロドロの金属にドキドキしながら練習を重ね、LED常夜灯の製作本番には全員が成功しました。
型抜きパンチで紙袋に模様の穴を開け、自分だけの提灯(ちょうちん)にして持ち帰りました。
暗くなると自動で灯(とも)り、朝日が射して消えるでしょう。毎夜が楽しみですね。
3) ロボット教室専用 電池チェッカーはんだ付け講座 終了
 4/29(木・祝)北九州パレスにて、4組の方に参加頂きました。
4/29(木・祝)北九州パレスにて、4組の方に参加頂きました。はんだこてを使って電子部品やICのはんだ付け作業を練習した後、ロボット教室用の電池チェッカーとして使える実用品を製作しました。
大きな失敗もなく、全員が完動品を持ち帰ることができました。
これでもう、ロボットが動かなくても先生に診断してもらう必要は無いよね!?
4) 5月景品交換会
3ヶ月毎の宿題ポイント交換会を下記授業日に開催します。
ポイントカードを忘れずに、早めに来て下さい。
[東福間]5/22
[八幡東]5/22
[小倉北]5/23
[中 間]5/29
[小倉南]5/30
5) 3月課題 高得点者 []内は教室と学年
◆プライマリ【13名平均 図形3.5】
5点…土屋[小倉北 年長], 原[小倉南1], 吉永[小倉南 年長]
◆ベーシック【20名平均 図面2.3+設問2.5=4.7】
10点…なし
9点…なし
8点…柴田[小倉北3]
7点…諭[小倉北2], 江藤[小倉南2]
◆ミドル【18名平均 図面3.2+設問1.3=4.5】
10点…なし
9点…なし
8点…中村[小倉北6], 小牧[小倉南4], 林田[小倉南3]
7点…藤津[中間4]
◆アドバンス【7名平均 図面8.3+設問4.4=12.7】
19点…宮尾[八幡東7]
18点…重藤[八幡東9]
6. コロナ問題の理解 その1
「このままでは変異株が全国に広がってしまう…」
4/23夜、菅首相が4都府県に3度目の緊急事態宣言を決定する会見で放った言葉です。
一年超かけて学習しない無為無策ぶりに、改めてショックを受けます。
・緊急事態宣言に関係なく、第1波、第2派とさざ波を迎えては落ち着いてきた
・低毒ウイルスほど止められない = 次々に変異して感染の波が起こる
という事実をもう認識するべきでしょう。
いや、GoTo推進派の菅さんも本心ではないでしょう。そこがまた闇です。
一年前より日本のコロナ対策は人災として、反対を表明してきました。
そう言えたのは、ひとえに、真のサムライ科学者・言論者らの分析の賜です。
第4波、マンボー、ワクチンとか言ってないで、新コロ問題を一瞬で終わらせる方法・・・
●感染症指定を1類相当(エボラ並み)→5類(インフル並み)へ
●PCR検査Ct値(陽性判定基準)を適正な30前後以下へ
どちらか一方だけでも医療リソースに数倍以上の余裕が生まれるのに、
風邪を封じ込める社会実験が失敗すると困る人がいるのでしょう。
何の為の感染防止・・・感染防止の為の感染防止・・・
一般病院に閑古鳥が鳴いて医療崩壊…
例年より死者数が減って医療崩壊…
これで緊急事態宣言を発出する政治の問題解決能力を信じて、全国民が自粛に協力するようなら、それこそ日本は終わりでしょう。
初期は仕方ないにしても、政府・行政の新コロ対策において、
問題は合理性を欠くこと以上に、批判かわしを優先してそれを放置すること。
科学的見解が分かれるなら、国民(どころか知事レベルまで)が正しく判断するに足る反証を封殺すること。
偏向報道のマスコミも、問題の元凶や本質を追及せず、400日連続で“コロナ脳”ウイルスをばら撒いています。
今回は、皆様が支持する立場を問わず、知っておいて頂きたい視点を紹介します。
数多の言論に触れてきた中でも、とりわけ公平で、客観的で、科学的で、人道的なのに、不気味さを増すばかりの言論統制をギリギリかわしながら世の為に発信されている方々がいます。
本来、これくらいの見識を国民に開示せずに(自分なりの)正しい理解も何もありません。
ロボットやAIの未来を語る前に、日本の産業を守らず、技術や財産の侵食を許した将来に考えが及ばないお人好しが量産されては元も子もありません。
是非ご参考の上、お子さんと一緒にお考え下さい。
《井上先生が斬り込んでいる問題》
・PCR検査の誤用と市場原理
・ワクチン信仰の幻想
・実効性を欠く感染経路対策
・免疫を減退する自粛の逆効果
・政治のポピュリズムへの迎合
◆特番『井上先生質問シリーズ第2弾 視聴者からの『新型コロナ』疑問、質問に答えます!』
<前半>ゲスト:大阪市立大学名誉教授 井上正康氏
松田政策研究所
https://www.nicovideo.jp/watch/so38560514
◆特番『井上先生質問シリーズ第2弾 視聴者からの『新型コロナ』疑問、質問に答えます!』
<後半>ゲスト:大阪市立大学名誉教授 井上正康氏
松田政策研究所
https://www.nicovideo.jp/watch/so38560446
《結局、コロナ問題は、民族毎の体質(免疫性・肥満率など)もさることながら、
国民性・政治の問題でもあることが分かる面白い談論》
◆松田学のニュース解説 実感なき緊急事態宣言延長の効果とドイツのコロナ死亡者解剖結果
松田政策研究所チャンネル2
https://www.youtube.com/watch?v=apKoTDfJN60
次回以降、まだ終わらなければ、PCR検査とマスクの問題を掘り下げたいと思います。
東福間・中間・小倉北教室 佐藤 / 八幡東・小倉南教室 中野