2.9月の課題
3.8月の解答
4.今後の授業スケジュール
5.お知らせ
1. 9月授業内容
1.0 <スタートアップ(全コース)>
割愛します。
1.1 <プライマリーコース『メカビートル』>
割愛します。
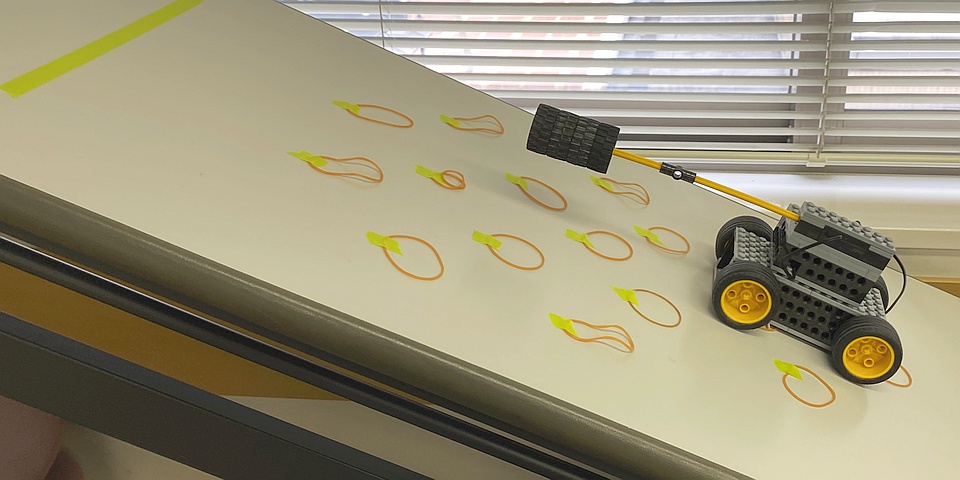



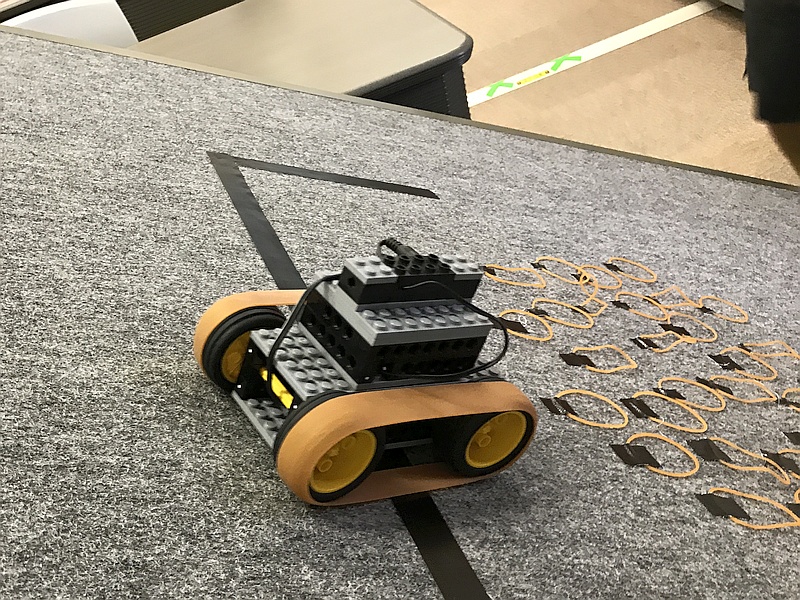
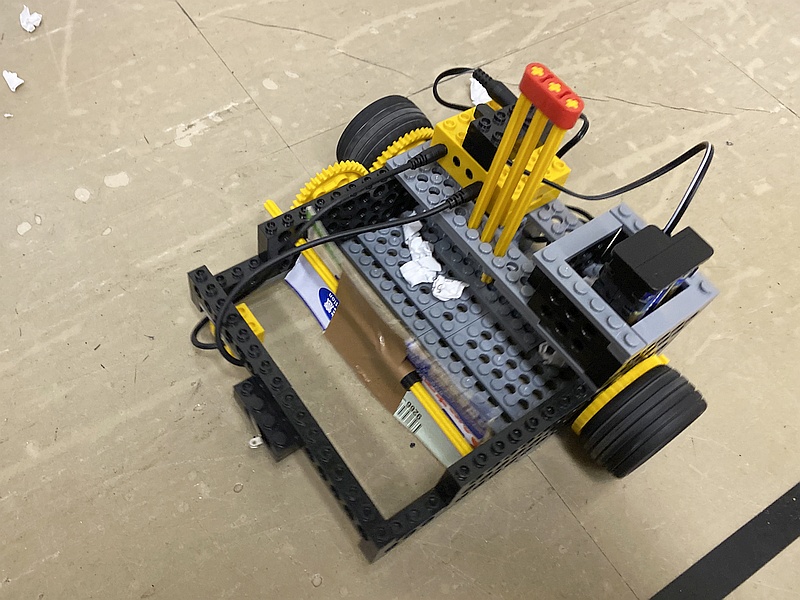
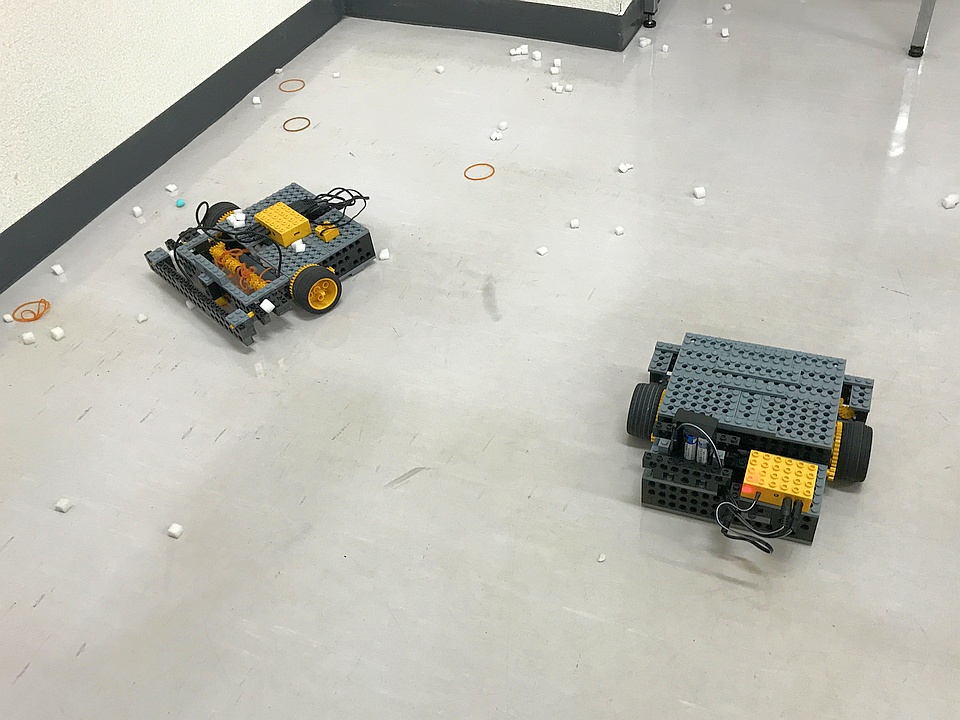
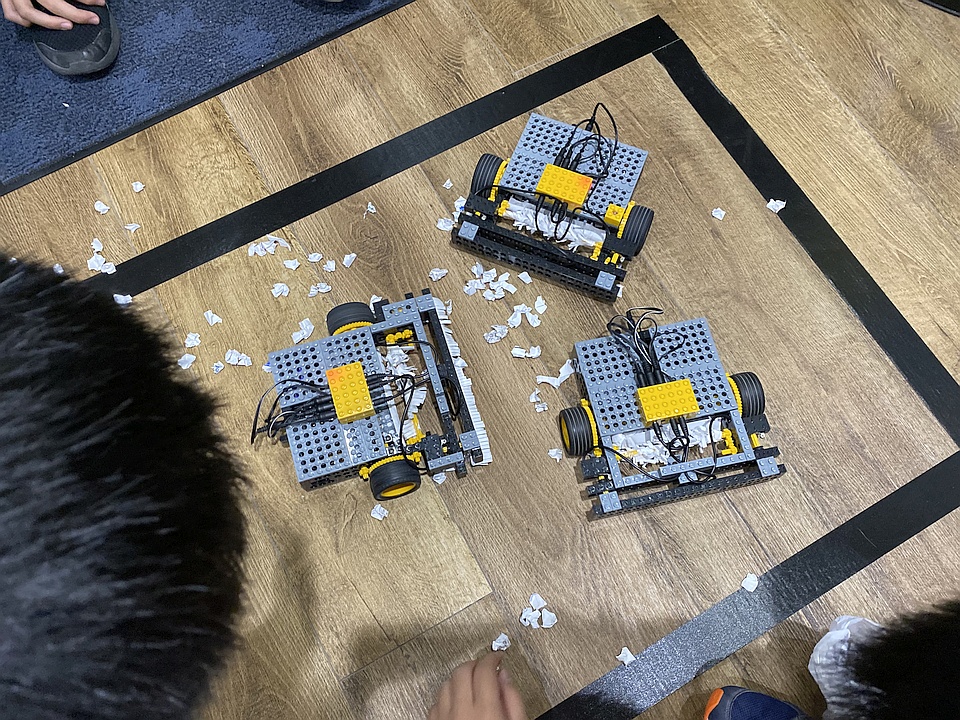
1.2 <ベーシックコース『う王さ王』>
“右往左往(うおうさおう)”をもじっていますので、この四字熟語を知っていれば、動作は想像に難(かた)くなかったでしょう。
赤色に目立つ巨大なバンパー(フレーム)を前後に装着した四輪車が、どうも前後(横から見れば左右)の壁にぶつかる度(たび)にスイッチバックして、行ったり来たりを繰(く)り返すようだ、
とまでは予想できましたが、1日目のテキストでは、「スライドスイッチを手で切り替えるのは大変だね」で終わり、核心部分はお預(あず)けです。
 2日目でようやく、衝突(しょうとつ)で押し込まれるバンパーがスライドスイッチを反転させる機構(きこう)を組み付けました。
2日目でようやく、衝突(しょうとつ)で押し込まれるバンパーがスライドスイッチを反転させる機構(きこう)を組み付けました。しかし、中には下記のポイント【レベル1・2・3】が未解決のため、最後までうまく動作しなかった例も散見(さんけん)されました。
スライドスイッチの固いものであったかもしれません。
レベル毎に順を追って、解決していきましょう。
【レベル1】最低限…
1) テキストを良く見て、正確に作ること(絶妙に設計されており、自己流では困難)
2) スライドスイッチのツマミを挟(はさ)む部品をしっかり組み付けましたか?(ぐらつくようではダメ)(*1)
【レベル2】スライドスイッチが固い人は…
3) スイッチを数十回左右に切り替えて、少し柔(やわ)らかくする(モーターを外して!)
 【レベル3】壁から受ける衝撃(しょうげき)を強めるために…
【レベル3】壁から受ける衝撃(しょうげき)を強めるために…4) 摩擦(まさつ)を減らす(タイヤがスムーズに回るように)
5) スピードアップ(電池4→5本)
6) 重くする(荷物をのせる・ぐらつかないように)(*1)
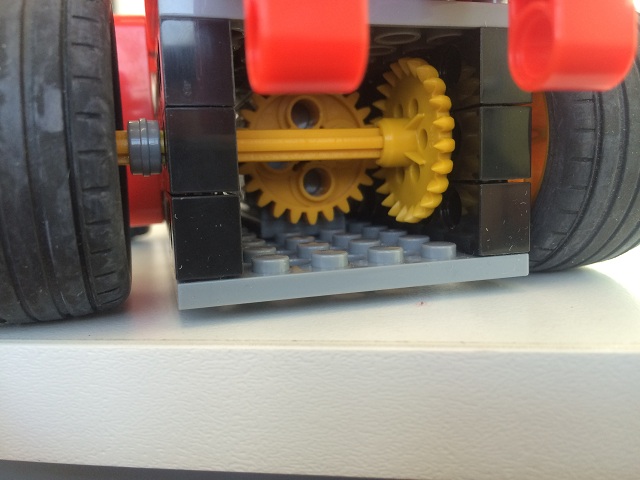 【レベル4】それでもダメなら、もっとスピードアップ!
【レベル4】それでもダメなら、もっとスピードアップ!7) モーター軸のピニオンギアをギアMに交換する(*2)
8) 左右に走らせる幅を広めにとる(加速に時間がかかるので)
【レベル5】それでダメでも、まだある!
9) 固いスイッチを弱い衝突力でも動かせるようにするには…?(てこの原理)(*3)
 どうです?「ダメだー」と思っても、これだけ、いや、まだ他にもありそうです(*4)。
どうです?「ダメだー」と思っても、これだけ、いや、まだ他にもありそうです(*4)。【レベル2・3・4・5】どれか1つでもOKかもしれません。
特に【レベル4】は簡単にできますし、これで動作しないことは無いでしょう。
授業中、最後まで諦(あきら)めずに何とか動かそうと奮闘(ふんとう)した生徒さんほど、目からウロコなのではないでしょうか。
解決方法が身に染(し)みると思いますので、ロボットを壊(こわ)す前に、ぜひトライしてください。
本来、【レベル3】を自ら考案するのがミドルコース進級レベル、【レベル4】がミドルコース内レベル、【レベル5】がアドバンス進級レベルです。
自分の改造力にしてください。






*1 “ぐらつかない”ことは、大事なポイントです。衝突エネルギーが“ぐらぐら”で失われるからです。
自動車のエンジンルームがつぶれやすく、車内への衝撃を和らげるのとは逆の考え方です。
*2 ピニオンギア(歯数8)をギアM(歯数24)に替えるので、3倍の増速になります。
実際は摩擦のせいでそこまで速くなりませんが、かなりスピードアップします。
*3 大幅に作り変える必要があるでしょう。
*4 例えば、走行中に輪ゴムを巻いて、スイッチ切替用エネルギーとして補助的に使うなど。
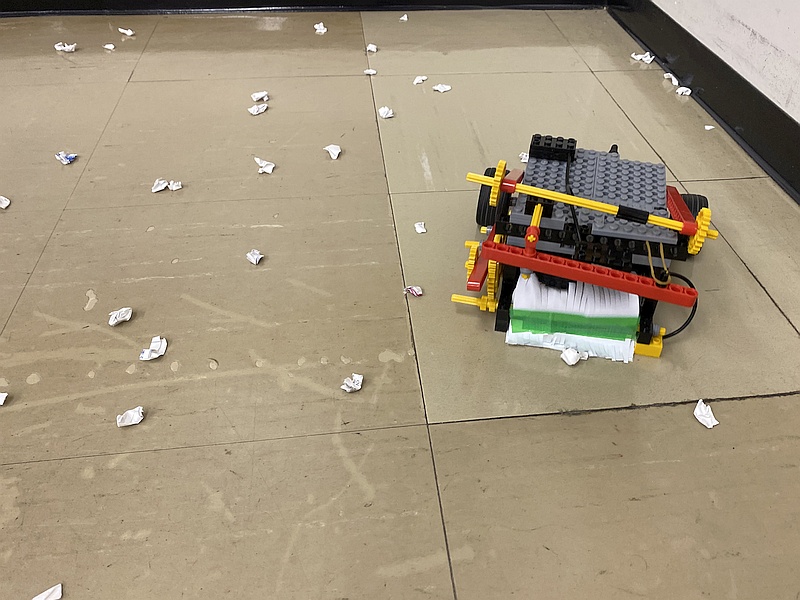
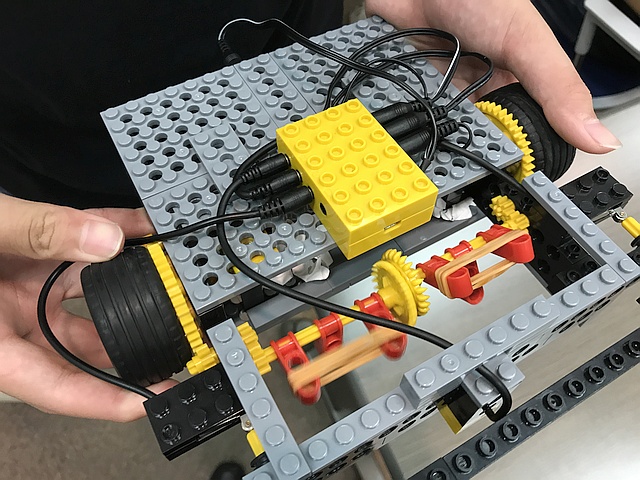
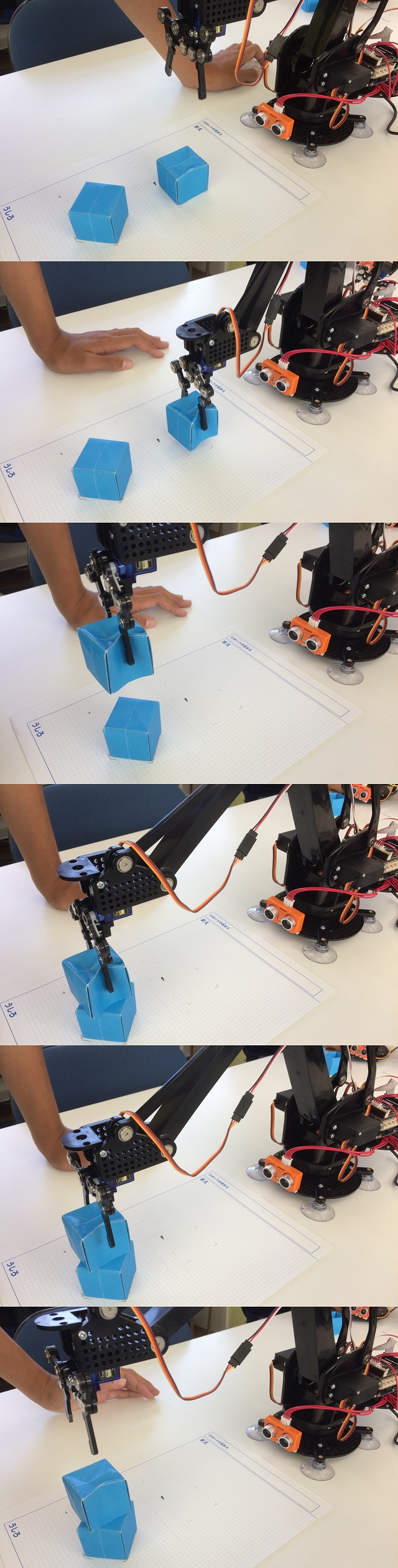
1.3 <ミドルコース『ロボアーム』>
ミドルコース中、1・2番を争う傑作(けっさく)に位置付けたい、摩訶(まか)不思議なロボットが巡ってきました!
動力はいつも通り、電池ボックスに繋(つな)いだモーター1個です。
手元で制御できることはせいぜい、スライドスイッチを反転させることくらいです。
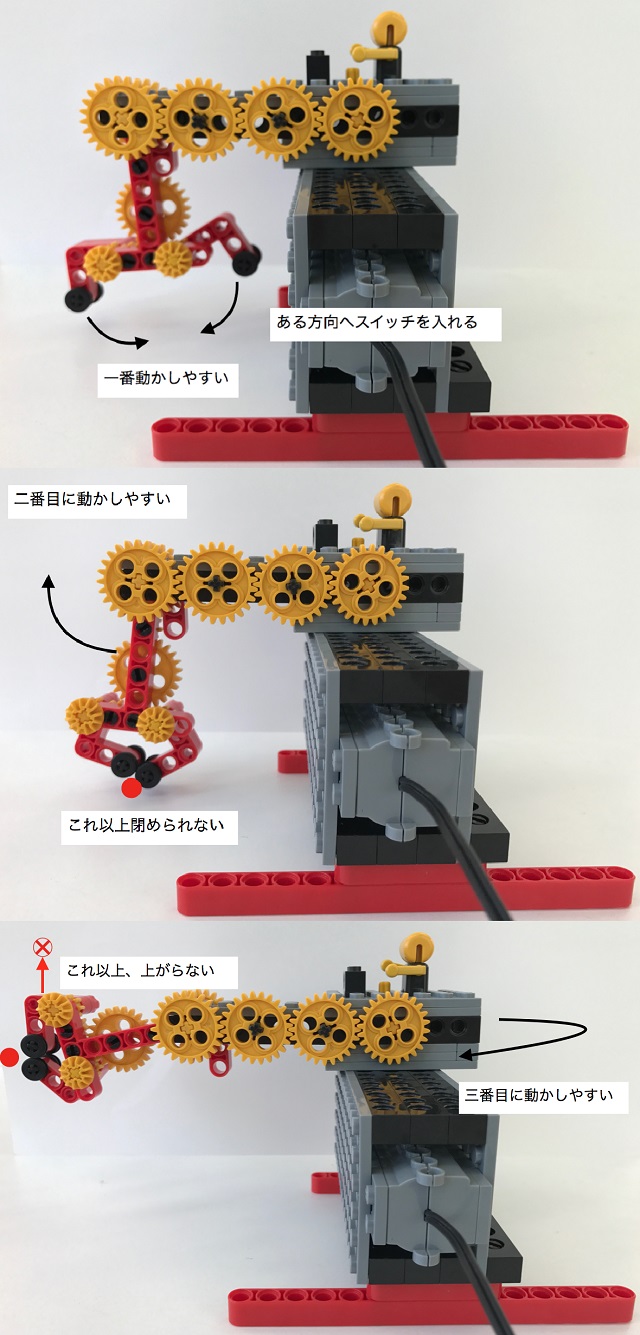
なのに、スイッチを入れると、
1) 垂れ下がったハンド(アームの先端)が物を掴(つか)む
2) アームを水平まで持ち上げる
3) アーム全体が回転して反対側へ運ぶ
の順に動作します。
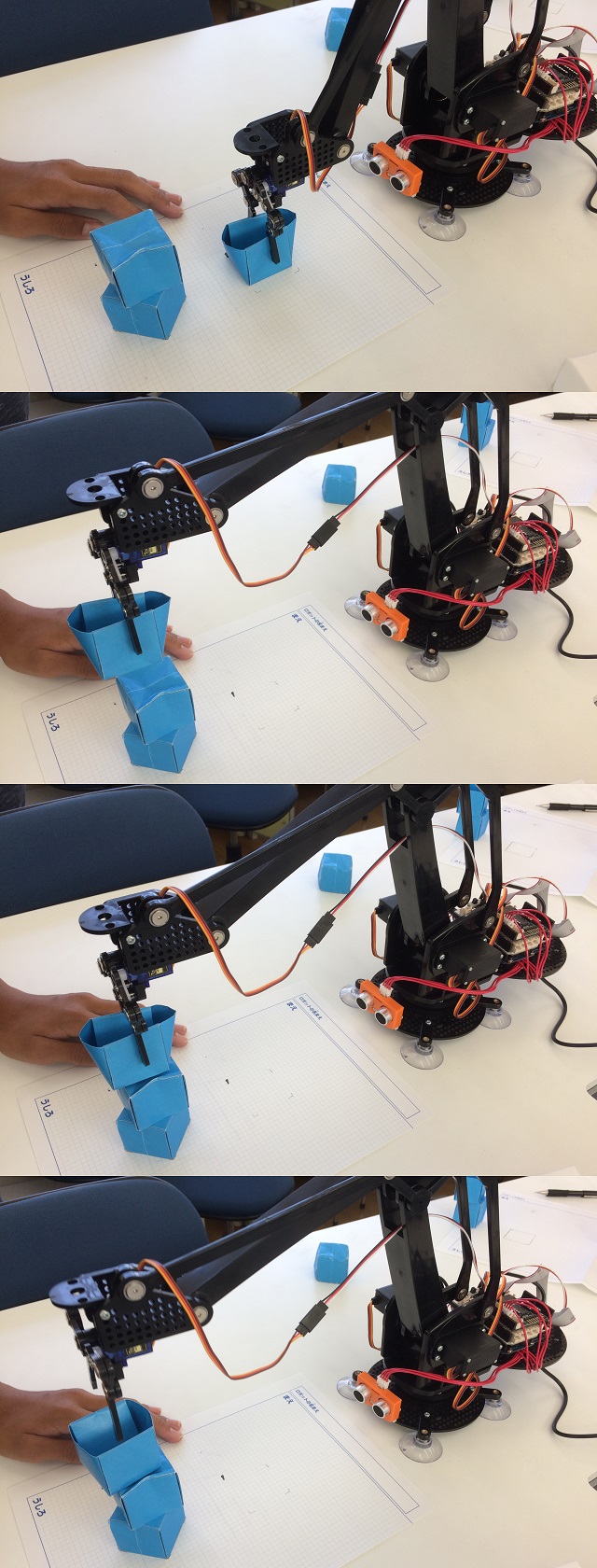
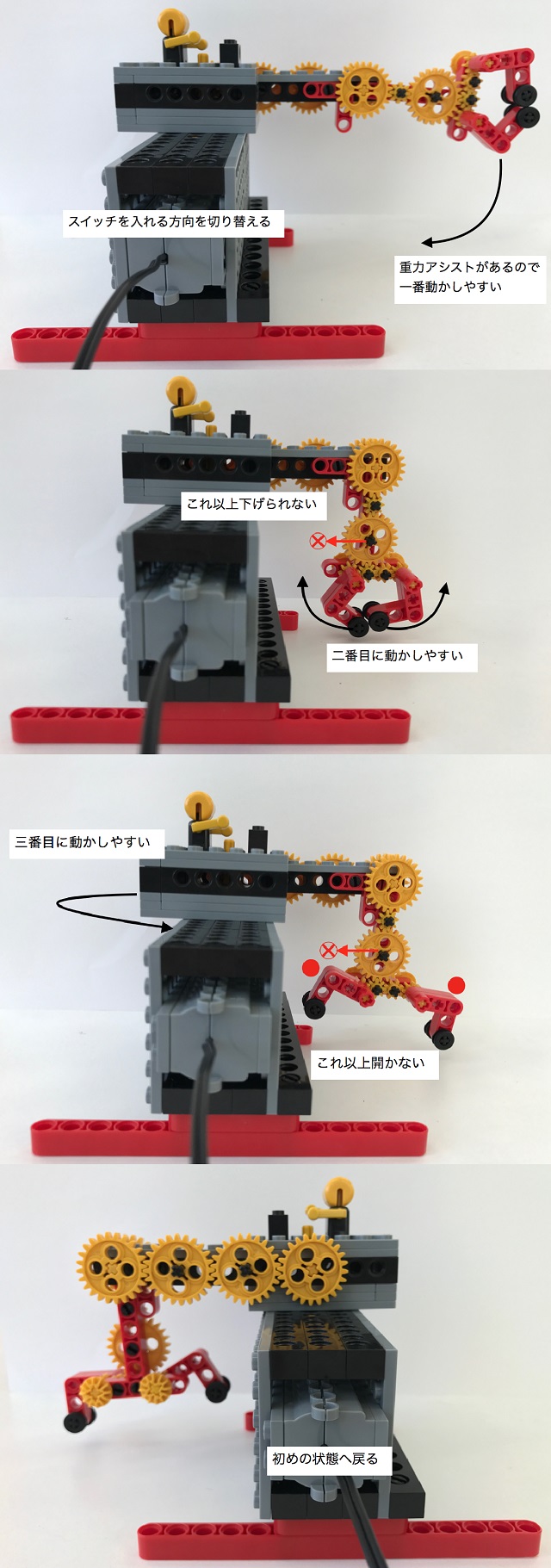 所望の位置で止め、今度はスイッチを反転させると、先程の逆順ではなく、
所望の位置で止め、今度はスイッチを反転させると、先程の逆順ではなく、4) 先ずはアームを降ろし、
5) ハンドを開いて荷物を離し、
6) アーム全体を元の側に回転して戻す
という一連のクレーン操作を熟練したかのようにこなすのです。
スイッチを入れている間、モーターはずっと一方向に回り続けているだけです。不思議ですね。
これは言わば、バイクがアクセルをあおり過ぎてウイリーしてしまうのに似た原理です。
バイクのエンジンが生み出した力は、バイク全体を加速させることと、
前輪を浮き上がらせることの2方向に使い道が残されているのです(*1)。
力の逃げ道といった方が感覚的には分かり易いでしょう。
通常は、ウイリーよりも小さい力で済む加速だけに使われますが、
「物体(バイク)は素早く加速させようとするほど大きな力を要する」慣性の法則(*2)により、あまりに強大な力(エンジン全力)にとっては、ウイリーさせる(前輪を浮き上がらせる)方が“楽”なのですね(*3)。
ロボットアームでは、慣性の法則は殆(ほとん)ど効いていませんので、負荷(アームに掛かる重力や、ジョイント部の摩擦)の軽い順に可動範囲を使い果たし、力が次々と逃げ道を探すのです(*4)。
 実際、3段階目のアーム回転動作が軽すぎて、2段階目の持ち上げ動作をスキップしたり、並行動作したりするなど、不安定になる場合がありましたが、
実際、3段階目のアーム回転動作が軽すぎて、2段階目の持ち上げ動作をスキップしたり、並行動作したりするなど、不安定になる場合がありましたが、・ 土台(ギアボックス)と回転アームの間に輪ゴム(またはホイール抜きタイヤ)を挟む
・ アーム自体を装飾して重くする
ことで摩擦を稼ぐと、スムーズに動作しました(*5)。
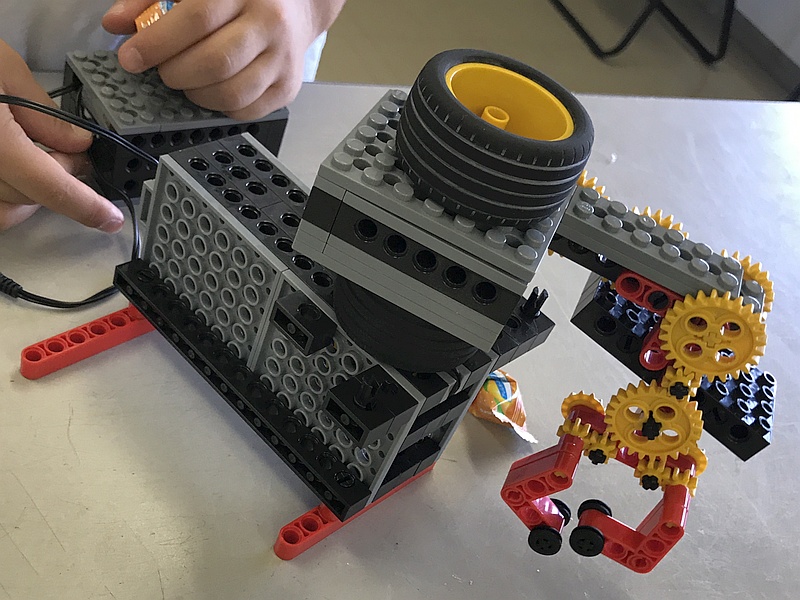
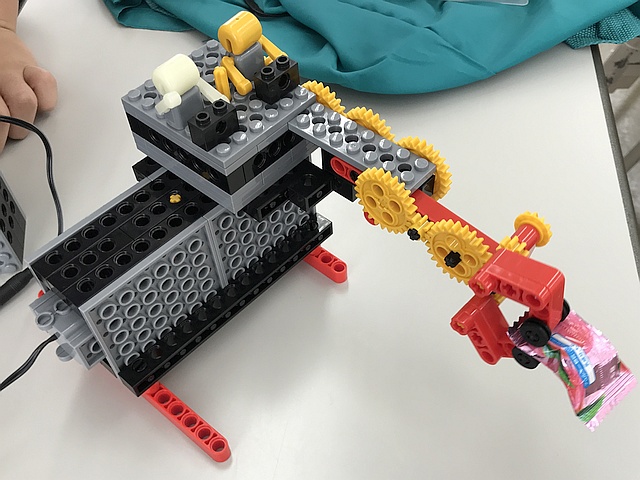
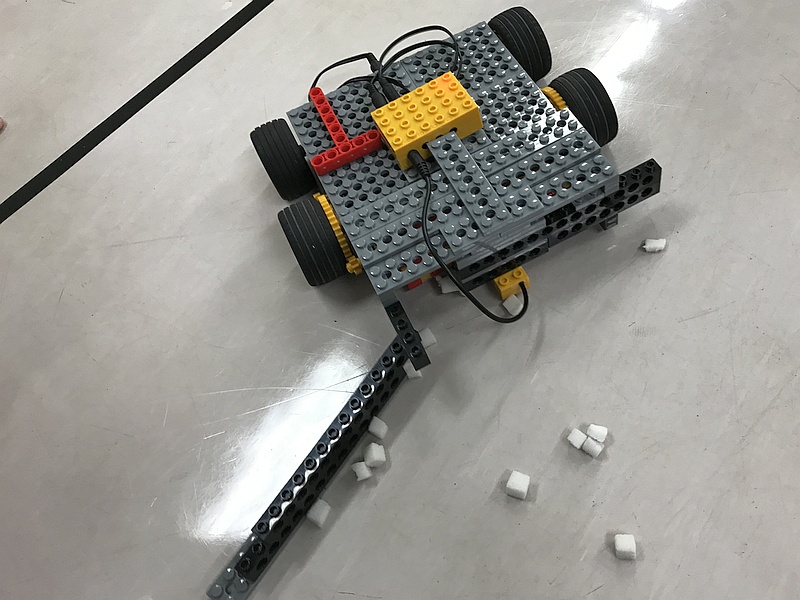
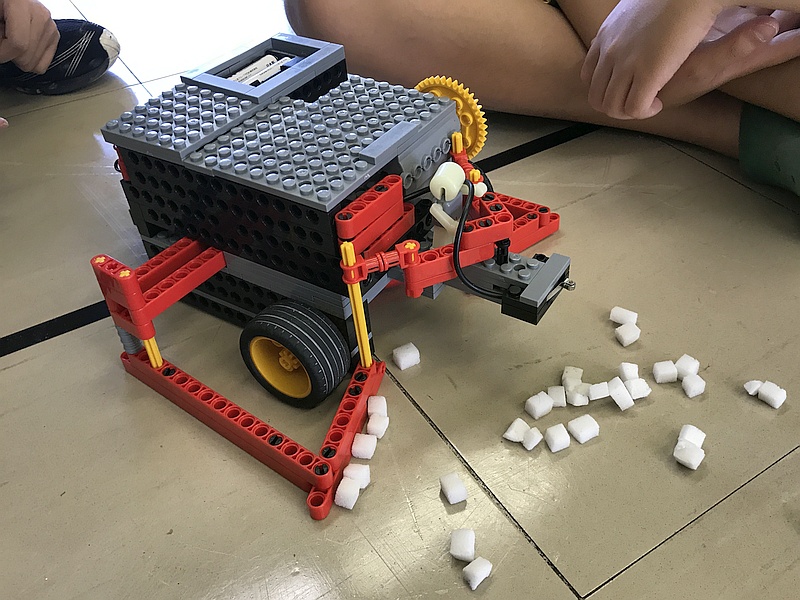
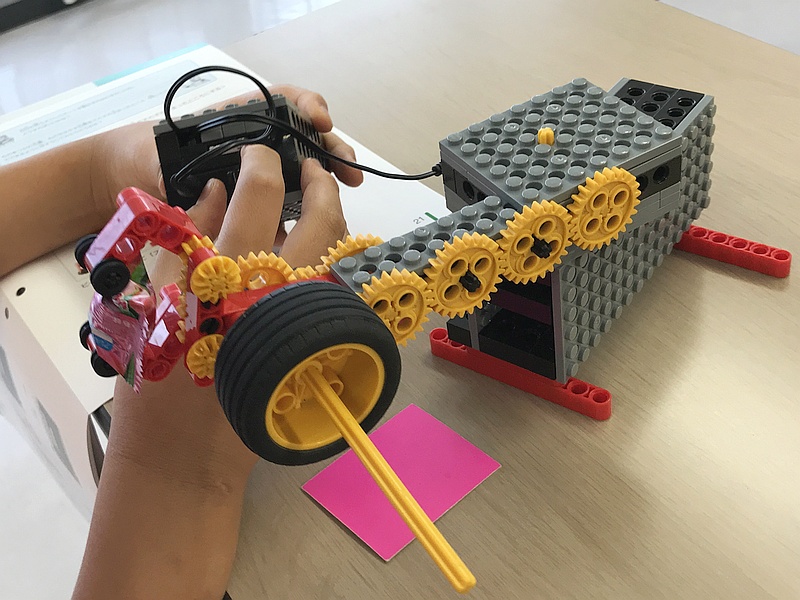 完成したロボットで、荷物搬送ゲーム(アメ玉キャッチャー)をプレイしました。
完成したロボットで、荷物搬送ゲーム(アメ玉キャッチャー)をプレイしました。ロボットの片側エリアからアメ玉を掴んでは、アームを180°回した先のトレイ上に降ろしてゲット!
アームの回転摩擦力を増やして、しっかり持ち上がるようにしておかなければ、トレイの縁の高さに阻(はば)まれます。
 単純に思えたスイッチの反転操作に手間取る(必ずしも逆順に動作しないので、細かなやり直しが難しい)一面もありましたね。
単純に思えたスイッチの反転操作に手間取る(必ずしも逆順に動作しないので、細かなやり直しが難しい)一面もありましたね。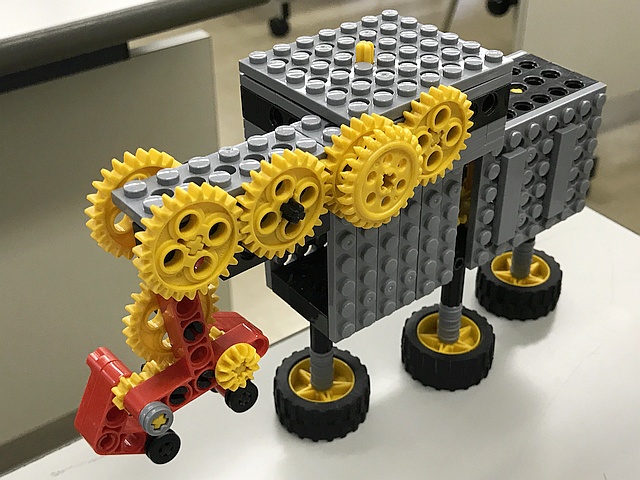

*1 接地状況により、ホイールスピン(タイヤを路面上で空転させる)を3つ目に数えることもできます。
*2 高校物理で学ぶ、〔力=質量×加速度(F = m・a)〕です。

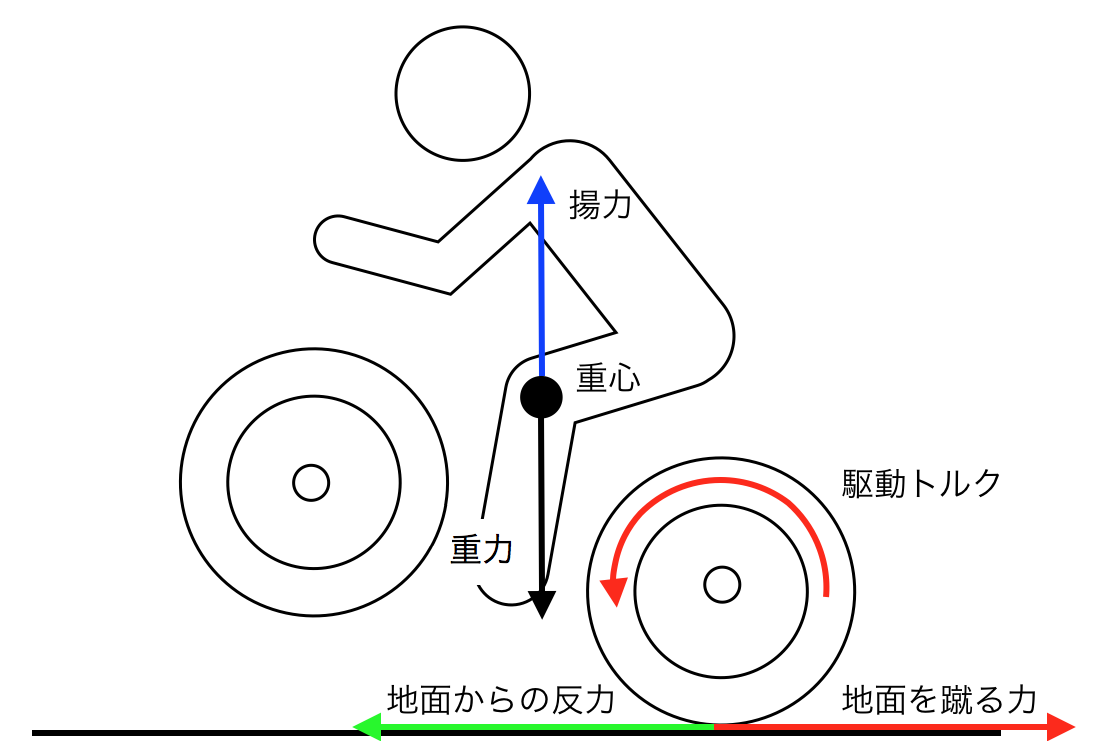 *3 “楽”に動く方が選ばれるもう1つの原理は、作用・反作用の法則です。
*3 “楽”に動く方が選ばれるもう1つの原理は、作用・反作用の法則です。物が動き始めるには、別の物を押して返ってくる反力をもらわねばなりません。
タイヤのグリップ力が強大で滑らない場合、固い地面はバイクのエンジンパワーに負けることなく、タイヤが蹴るのと同じ力でいくらでも押し返してくれます。
ランニングマシンの上なら、床の方が後方へずれる動きも可能ですが、逃げない相手(動かない地面)に対しては、自分の方が逃げる(加速かウイリー)しかありません。
ハンドやアームが限界位置まで来ると、それが動かない地面のように振舞って、次の動作へ逃げます。
*4 アームの「上げ・下げ」に必要な力は重力が大きく関係しますが、ハンドの「掴む・離す」はほぼ同じ力で済みます。
だから、「掴む→上げる」の順だし、「下げる→離す」の順になるのです。
アームの旋回には、これらより大きな抵抗(摩擦力)が働けば、動きの順序に一貫性が生まれます。
*5 〔摩擦力=摩擦係数×荷重〕なので、輪ゴムを挟むことと、重くすることの両方が効果的です。氷上では重たい力士でもツルツル滑ってしまいますよね。
1.4 <アドバンスコース『ロンボ(2)』>
《下記を参照下さい》
http://robocobo.sakura.ne.jp/blog/adv/adv1-1809.pdf
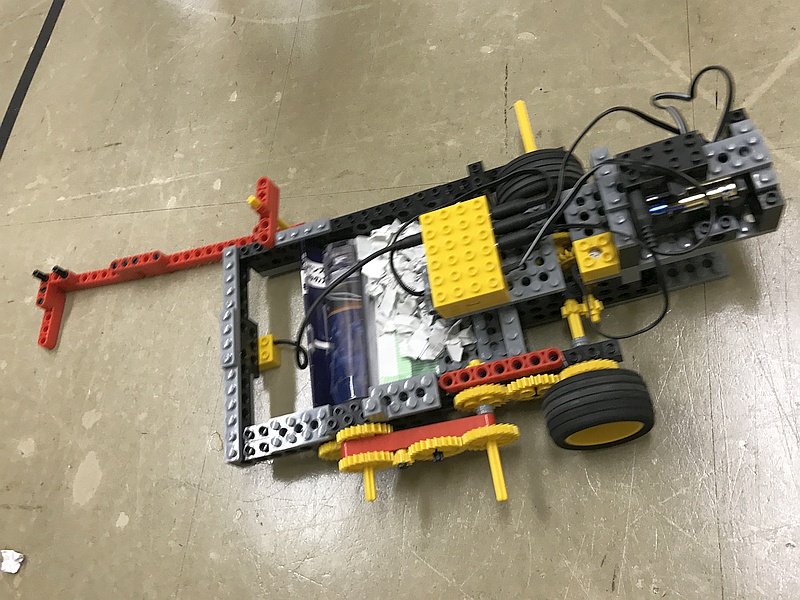


1.5 <プロ2年目コース『アームロボット(3)』>
(進度が遅れておりますので、10月挽回予定内容を含みます)
最終月は、サーボモーター式アームロボットを使った仕事(?)編です。
アームロボットが高精度に動いたとして(*1)、決まった文字を書く自動書記や、決まった位置の荷物を運ぶ自動搬送など、
“決め打ち”プログラムで人を楽しませることはできますが、センサー入力による制御がなければ、時計の針と大差ありません。
 台座(ベース)部に超音波センサーを取り付け、荷物までの距離を測れるようにしました。
台座(ベース)部に超音波センサーを取り付け、荷物までの距離を測れるようにしました。Ultrasonic xxx(US1); // US1接続センサーへのアクセス用インスタンス(オブジェクト変数)xxx生成
long us = xxx.timing();
float cm = xxx.convert(us, Ultrasonic::CM);
float mm = xxx.convert(us, Ultrasonic::MM);
と書けば、超音波センサーからの時間(マイクロ秒)を us に読み取り、音速から距離を計算し、cm や mm に変換してくれます(*2)。
これで、アームロボット自身が荷物までの距離を計測し、掴みに向かうプログラム [ArmRobot5/SensorArmRobot3_4] ができます(*3)。
掴む位置(計測値による動作)が掴んで欲しい位置よりも15mm遠方であれば、setPosition(mm - 15, …) のように補正するだけです。
あるいは、超音波センサーをハンド部に取り付けて、手を近づければ逃げ、遠ざければ追ってくる不気味なハンド [ArmRobot5/SensorArmRobot2Ans] にして遊ぶこともできます(*4)。
 他に、超音波センサーを使わず、“決め打ち”や手動コントローラーで遊ぶサンプルプログラムが用意されています。
他に、超音波センサーを使わず、“決め打ち”や手動コントローラーで遊ぶサンプルプログラムが用意されています。・[ArmRobot6/Block] … 位置と高さを決め打ちした、ブロック積み
⇒ 3個くらい積み上げられますか?
・[ArmRobot6/semiAutoArmCustom] … コントローラーによる手動操縦
⇒ [ArmRobot3/semiAutoArm] と同等ですが、速度調整(リミット)され、可動範囲を広げています
・[ArmRobot6/UFOcatche] … UFOキャッチャー
⇒ どのような動作か、説明がありませんが、プログラムを解析できますか?
自由に改変してプログラミング力を上げておきましょう。
*1 前回書いたように、プラスチック製の長いアームを付け根のモーターで振り回すので、精度はイマイチですが…
*2 音速を340m/sとすれば、cm(片道距離) = 340 * 100 * us(往復時間) / 1000 / 1000 / 2 で求まります。
*3 旋回角度 0°限定方向です。持ち上げて旋回(搬送)する先は適当に決めます。
*4 もっと生き物っぽさを出したければ、あまりに手を近づけ過ぎるとハンドを閉じては開くという動作を加えて、噛みつき攻撃を表現するのもよいのではないでしょうか。
2. 9月の課題
<スタートアップ(全コース)>
特にありません
<プライマリーコース>
- オリジナル図形プリント
http://robocobo.sakura.ne.jp/blog/HW/RobotP2009-Q.pdf
<ベーシックコース>
- 上記授業内容を精読する(概ね3年生以上/低学年は補助の下で)
- オリジナル課題プリント(3面図+設問)
http://robocobo.sakura.ne.jp/blog/HW/RobotB2009-Q.pdf
<ミドルコース>
- 上記授業内容を精読する
- オリジナル課題プリント(3面図+設問)
http://robocobo.sakura.ne.jp/blog/HW/RobotM2009-Q.pdf
<アドバンスコース>
- 上記授業内容を精読する
- オリジナル課題プリント(見取図+設問)
http://robocobo.sakura.ne.jp/blog/HW/RobotA2008-Q.pdf (8月配信済み)
<プロ2年目コース>
- 上記授業内容を精読する(該当テキストページを見ながら)
- アームロボットを完成させる
3. 8月の解答
<プライマリーコース>
http://robocobo.sakura.ne.jp/blog/HW/RobotP2008-A.pdf
<ベーシックコース>
http://robocobo.sakura.ne.jp/blog/HW/RobotB2008-A.pdf
<ミドルコース>
http://robocobo.sakura.ne.jp/blog/HW/RobotM2008-A.pdf
<アドバンスコース>
翌テーマ1ヶ月目(来月)に配信します
4. 今後の授業スケジュール
――――――――――【佐藤教室長】――――――――――
[東福間]第1・3土原則<学習ルームでこぼこ>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドバンス
⇒ 10/3, 17, 11/7, 21, 12/5, 19
[中間]第2・4土原則<なかまハーモニーホール>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドバンス/ロボプロ
⇒10/10 第1回 3F会議室2
10/24 第2回 3F会議室2
11/14, 28※, 12/12, 26
※11/28はハーモニーホール利用不可の為、代替施設(未定)で開催します
[小倉北]第1・3日原則<ムーブ>
- 10:30~ ベーシック/プライマリ
- 13:00~ ミドル/ロボプロ
- 15:00~ アドバンス
⇒10/ 4 第1回 5F小セミ
10/18 第2回 4F和室・工芸室
11/1, 15, 12/6, 20
――――――――――【中野教室長】――――――――――
[八幡東]第1・3土原則<レインボープラザ4F>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドバンス
⇒ 10/3, 17, 11/7, 21, 12/5, 19
[小倉南]第2・4日原則<総合農事センター2F>
- 10:30~ ベーシック/プライマリ
- 13:00~ ミドル
- 15:00~ アドバンス
⇒ 10/11, 25, 11/8, 22, 12/13, 27
5. お知らせ
1) ロボット教室専用 電池チェッカーはんだ付け講座 11/3(火・祝) ロボットの動きがおそい! 動かない! 電池がなくなったのかな? 電池じゃないのかな?
ロボットの動きがおそい! 動かない! 電池がなくなったのかな? 電池じゃないのかな?電池パワーをはかりたいけど、市販の電池チェッカーは一本一本取り外して面倒...
Battery Checker R6V2 なら、スライドスイッチにさすだけでカンタン残量チェック!
とっても実用的な電池チェッカーをはんだ付けして組み立てる講座です。
練習もやりますので、初めてのはんだ付けでも安心してご参加ください。
【10/3~11配布チラシ】
http://robocobo.sakura.ne.jp/blog/lab/BatChecker-2009.pdf
【講座名】
オリジナル電子工作『ロボット教室専用 電池チェッカーはんだ付け講座』
【内容】
はんだこてを使って、電子部品やICのはんだ付け作業を練習した後、
ロボット教室用の電池チェッカーとして使える実用品を製作します。
【講師】中野・佐藤
【会場】北九州パレス(勤労青少年文化センター) 2F 第2会議室
【時間】11/3(火・祝) 9:30~11:30 (2時間)
【対象】ロボット教室生 小3~ 8組(ご家族2名まで同伴可)
【参加料】
6,050円(受講料3,850+材料費1,650円+はんだセットレンタル代550円)
*はんだセット持込可(-550円/申込時お伝え下さい)
【申込方法】メールにてお申込み下さい。10/20〆切・先着順です。
【申込条件】
- はんだセット持込品(こて・台)に不備がある場合は、レンタル品を使用頂きます。
- 原則として、11月お引落し額(12月分)に加算して徴収させて頂きます。
キャンセル・欠席により空席が発生した場合は返金できません。
(キットと製作テキストのみお渡しします)
2) ベーシック/ミドルコース6ヶ月延長
従来、ベーシック/ミドルとも18ヶ月コースでしたが、
ベーシックは10月~、ミドルは来年1月~6ヶ月ずつ新作ロボットが追加され、24ヶ月コースとなります。
但し、弊教室では従来通り、コース満期に拘らず、学年・能力・環境・内容に鑑みて最適となるよう進級ご提案して参ります。
3) 12月分~月会費改定(プロを除く)
本部よりチラシ・メールでお知らせしますが、下記の通り改定(440円値上げ)させて頂くことになりました。
<プライマリー/ベーシック/ミドル>
現行: 9,000円(毎月テキスト・税込10,450円/月)
⇒改定: 9,400円(毎月テキスト・税込10,890円/月)
<アドバンス>
現行: 9,000円(隔月テキスト・税込10,230円/月)
⇒改定: 9,400円(隔月テキスト・税込10,670円/月)
ヒューマンアカデミーでは、第1号ロボット教室開校以来、10年間同じ月会費に据え置いて参りましたが、
昨今の社会環境の変化・保護者の方からのご要望にお応えし、以下のサービス強化に充てさせて頂きたく、何卒ご理解・ご協力お願い申し上げます。
●新オンライン学習コンテンツ
●学習到達度診断
●保護者向け教育情報
詳細は本部チラシ・メールをご覧下さい。
4) 2020記念キット限定販売
ヒューマンアカデミーロボット教室10周年を迎え、節目の特別企画として記念キットを販売することとなりました。
標準とは異なる色合いのキットで製作することにより、普段とは違う風格のロボットをディスプレイしたり、カラーリングに合わせたオリジナルロボットを考えることもでき、創造性が更に豊かになりそうです。
授業以外のロボットを製作するにもパーツが混ざりにくく、おススメです。
◇01. 2020記念キット 29,700円
◇02. 金銀銅パーツキット 14,300円
◇03. ペン立て組立パーツセット 3,850円
◇04. タブレットスタンド組立パーツセット 3,630円
数量限定・在庫次第で終了します。教室にてお渡し予定です。
ご希望の方はメールにて承ります。お代はお引落しで頂戴します。
http://robocobo.sakura.ne.jp/blog/goods/kinenkit2020.pdf
5) 2020記念イベント『大人のロボットコンテスト』エントリー受付中
大人=16歳以上のロボット教室関係者(講師、保護者、兄弟、卒業生…)の熱いアイデアのぶつけ合い!
子どもだけでなく大人も楽しめるロボット教室 第一弾として、2020記念キットを使用したロボットコンテストを開催します。
タイトなスケジュールで恐縮ですが、お早めにキット手配をご相談の上、奮ってご参加下さい。
※オンライン全国コンテストです
※2020記念キットを使用することが条件です
(複数キット使用のエントリー部門も設定)
http://robocobo.sakura.ne.jp/blog/contest/adult_contest_flyer.pdf
6) 8月課題 高得点者 []内は教室と学年
◆プライマリ【5名平均 図形4.8】
5点…藤原[八幡東2], 向井[小倉北2], 土井[小倉南2], 古場[小倉南1]
◆ベーシック【20名平均 図面2.9+設問2.5=5.3】
10点…なし
9点…鞍成[中間4], 小牧[小倉南4]
8点…なし
7点…安倍[小倉南5], 高木[小倉南5], 諸富[小倉南2]
◆ミドル【16名平均 図面2.6+設問2.1=4.7】
10点…中村[小倉北6]
9点…なし
8点…橋本[小倉南3], 林田[小倉南3]
7点…なし
6点…米山[小倉北4]
東福間・中間・小倉北教室 佐藤 / 八幡東・小倉南教室 中野