2.3月の課題
3.2月の解答
4.今後の授業スケジュール
5.お知らせ
1. 3月授業内容
1.0 <スタートアップ(全コース)>
割愛します。
1.1 <プライマリーコース『のびーるハンド』>
割愛します。







1.2 <ベーシックコース『ロボリン君』>
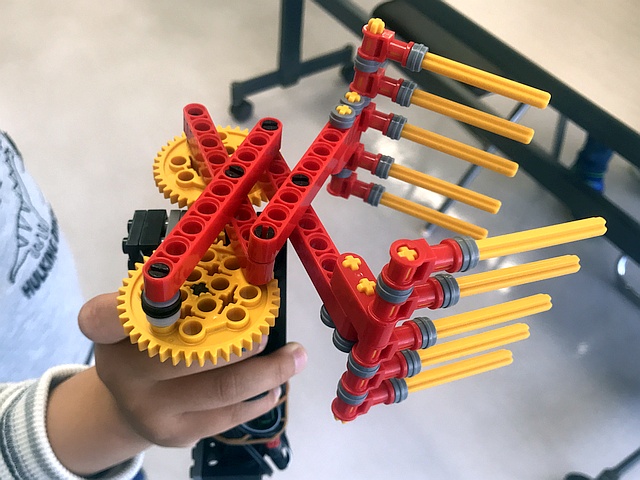
 第5回アイデアコンテスト全国大会(2015年)ミドルコース最優秀賞作品(当時小3)がベースの、ボウリングロボットです。
第5回アイデアコンテスト全国大会(2015年)ミドルコース最優秀賞作品(当時小3)がベースの、ボウリングロボットです。最優秀賞作品とは言え、書くべきことは特にないです。(このロボットだけは…)
モーター軸が直接、腕(うで)に見立てたLロッドを回すだけですので、ギアトレーンも動力リンクも、何もなし。
 デザイン性は秀逸(しゅういつ)ですので、雰囲気(ふんいき)は満点です。
デザイン性は秀逸(しゅういつ)ですので、雰囲気(ふんいき)は満点です。これはもう、ボウリング大会で盛(も)り上がるしかありません。
緊張感(きんちょうかん)を出すべく、先生の司会により全員一斉に投球します。
下記のレギュレーションにて点数を競いました。
1) ピンはピニオンギアうす + シャフト3ポチ
2) ピン数は5本(前2本+後ろ3本のレイアウト)
3) ピン位置はスコアボード前4ポチ分の範囲(はんい)内
4) ボールはマイタギア2個をくっつけた大きさまで(テキストp.14)
5) 2投球×5フレーム(ストライク1回につき飴玉1個ゲット)(*1)
25点満点で優勝する人、1~2点で終わる人など、さまざま。
何ゲームやっても、あまり変わりません。偶然(ぐうぜん)や運だけではないようです。
下記が勝つポイントだったようです。
・投球ロボットが左右に向きを変えられるか(2日目テキスト)
・電池がパワフルか(新しいか、4本よりも5本か)
・ピン同士が離(はな)れているか(くっつけて置くと、後ろのピンが前のピンを支え、倒れにくくなる)
・腕をぐるっと回した後にボールに当てるか(腕の加速を待たず、スイッチONですぐに当てる位置だと、ボールが遅(おそ)くてピンまで届かない)
 テキスト通りでは満足しない生徒さん向けに、ロボットの腕を高速回転させる改造を提案しました。
テキスト通りでは満足しない生徒さん向けに、ロボットの腕を高速回転させる改造を提案しました。大きいギアM(モーター側)で小さいピニオンギア(腕側)を回すことにより、腕の回転数が3倍になります。
これによりボールの勢いが増(ま)し、ピンを倒しやすくなります。
 3倍では満足いかず、さらに大きいギアL(モーター側)で小さいピニオンギア(腕側)を回し、腕の回転数を5倍にまで増速(ぞうそく)させる猛者(もさ)も現れました。
3倍では満足いかず、さらに大きいギアL(モーター側)で小さいピニオンギア(腕側)を回し、腕の回転数を5倍にまで増速(ぞうそく)させる猛者(もさ)も現れました。あまりのボールの速さに、ボウリングと言うよりレールガンのようでした。
 通常、ボーリングの投球は下投げですが、上投げするロボットも登場しました。まるで投石器のようです…
通常、ボーリングの投球は下投げですが、上投げするロボットも登場しました。まるで投石器のようです…ボールをリリースする角度によって着地点が変わるので微妙(びみょう)な調整が必要ですが、当たりさえすれば効果は絶大! 高得点を連発していました。
 皆さん、楽しみにしていただけあって、ゲーム中はいつにも増(ま)して、歓喜(かんき)の雄叫(おたけ)びや、ミスを嘆(なげ)く声が飛び交(か)いました。
皆さん、楽しみにしていただけあって、ゲーム中はいつにも増(ま)して、歓喜(かんき)の雄叫(おたけ)びや、ミスを嘆(なげ)く声が飛び交(か)いました。君たちは、まだまだ、遊び足りないんだね。
*1 本物のボウリングでは、1~9フレームまで2投球、10フレーム目を3投球にして、全ストライク(9フレーム目までストライク9回 + 10フレーム目ストライク3回)で 30点×10フレーム=300点満点です。
このルールに倣(なら)うと、ロボリン君(p.22~)では、5フレームとも2投球、全ストライク(4フレーム目までストライク4回 + 5フレーム目ストライク2回)で 15点×4フレーム + 5フレーム目10点=70点満点とすることもできます。
ストライクを出すと、次の2投分まで加算した(計3投分の)点数が入り、最高で、本物では10点×3=30点、ロボリン君では5点×3=15点となります。
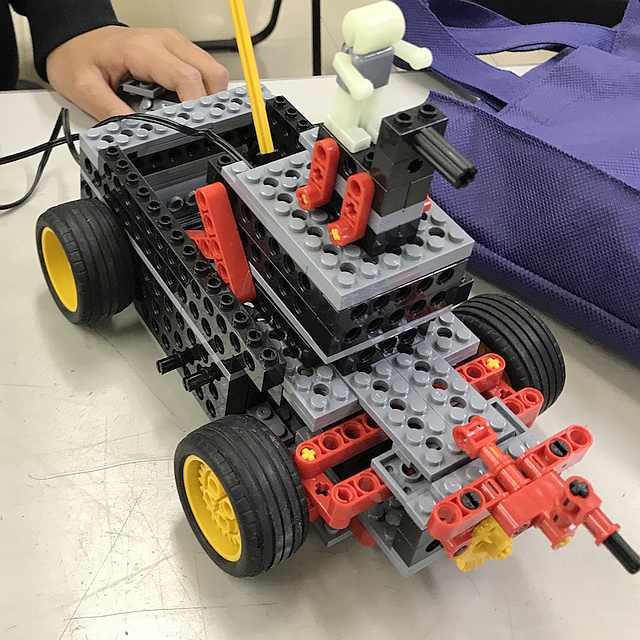
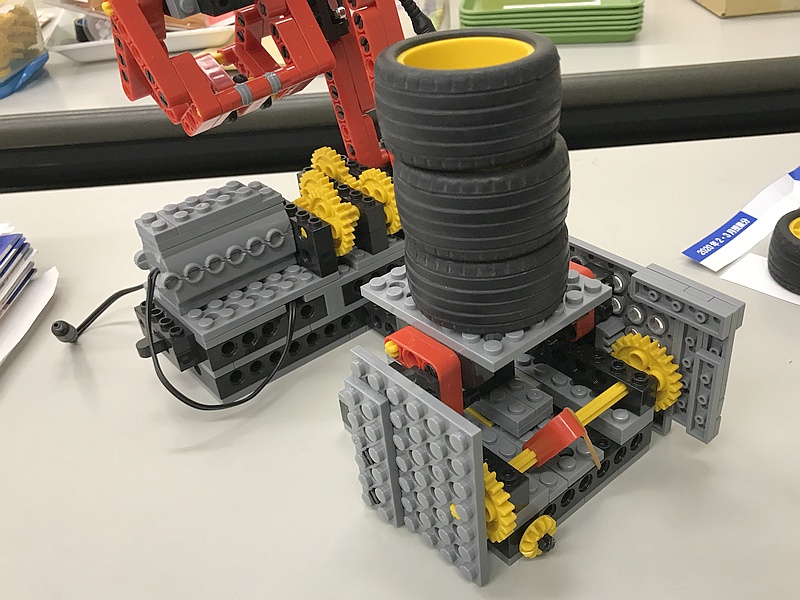
1.3 <ミドルコース『ステアリングカー』>

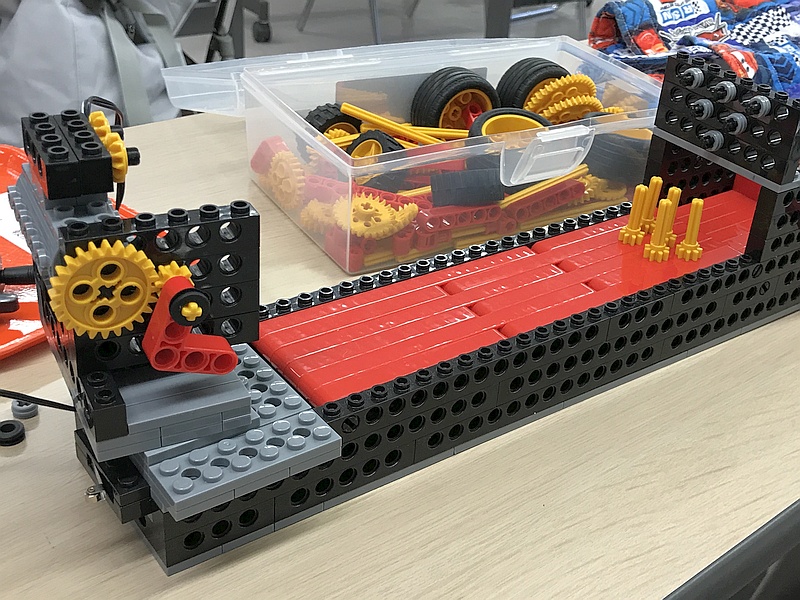
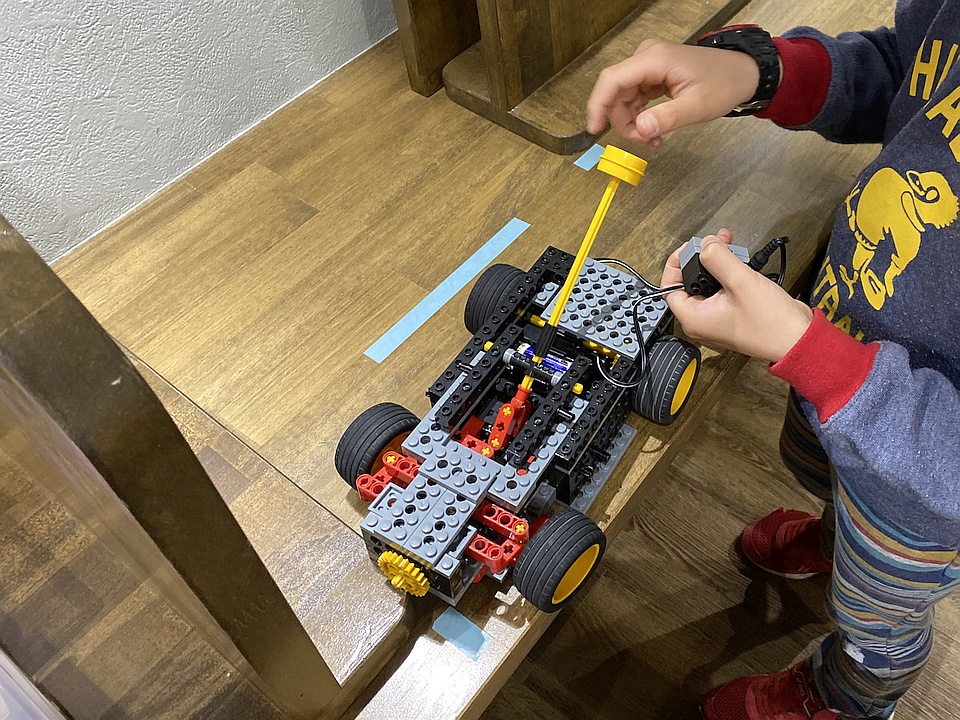
機械の王道たる、自動車です。ロボット教室の生徒さんなら、絶対に造って欲しい一台です。
 しかし、これまで幾度(いくど)となくロボット本体にタイヤ4輪を付けて転がしてきたのに、なぜ今さら“車”なんでしょうか?
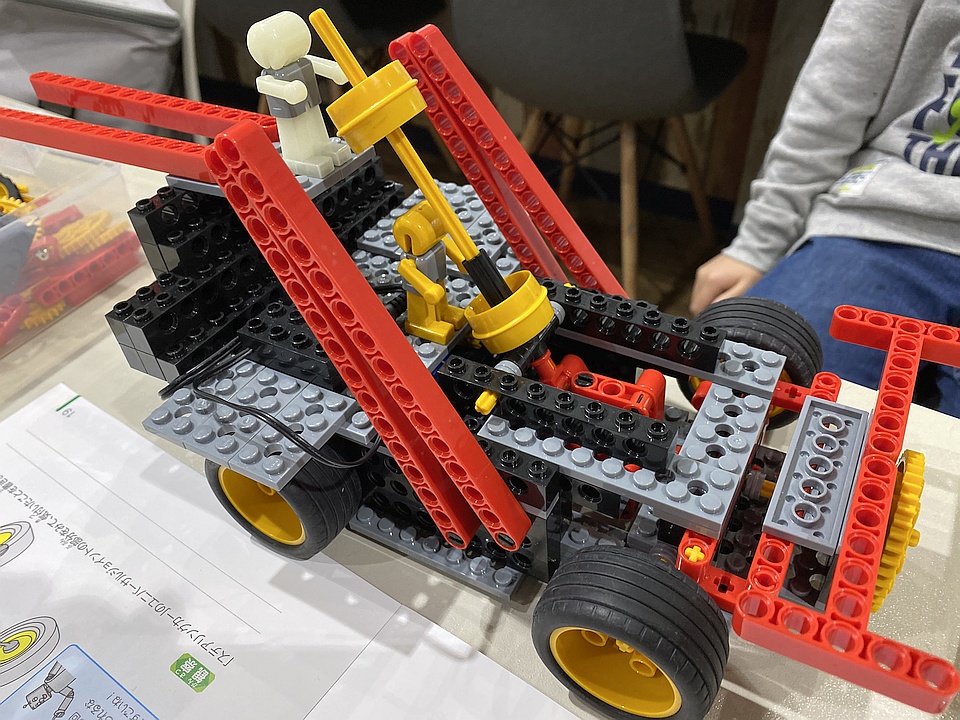
しかし、これまで幾度(いくど)となくロボット本体にタイヤ4輪を付けて転がしてきたのに、なぜ今さら“車”なんでしょうか?そのポイントは曲がる仕掛け(ステアリング)、つまり、ハンドル(英語ではステアリングホイール)を回すと左右の前輪が同期して向き(舵角=だかく)を変えるメカニズムです。
このメカニズムは3点から構成されています。
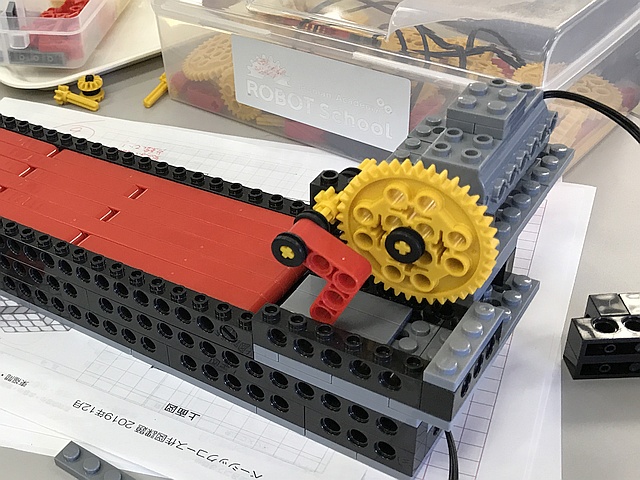
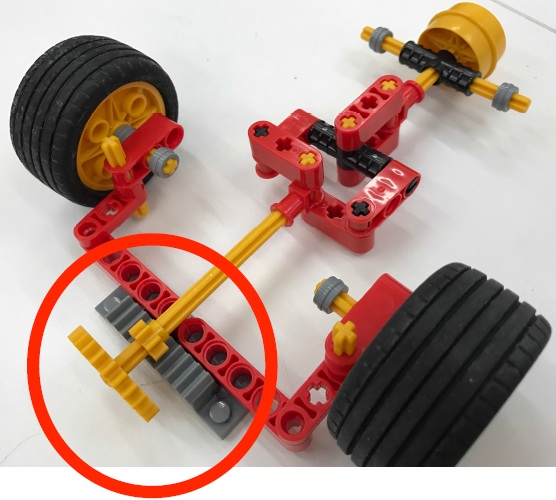 (1) ラック&ピニオン方式
(1) ラック&ピニオン方式円形のピニオンギアを直線状のラックギアと噛み合わせ、ハンドル操作による回転運動を左右方向の直線運動に変換し、前輪の舵角(だかく)を変えます。
このラックギア(洗濯板みたいなやつ;通じるかな…)は、今までロボット顔面の付け髭(ひげ)くらいにしか利用する機会のなかった人にとっては、初めて日の目を見ました!
これが本来の使い方ですよ!
この仕組みは、プラモデルで自動車を組み立てたことのある人なら知っていたでしょうが(*1)、実車と同じ(*2)です。
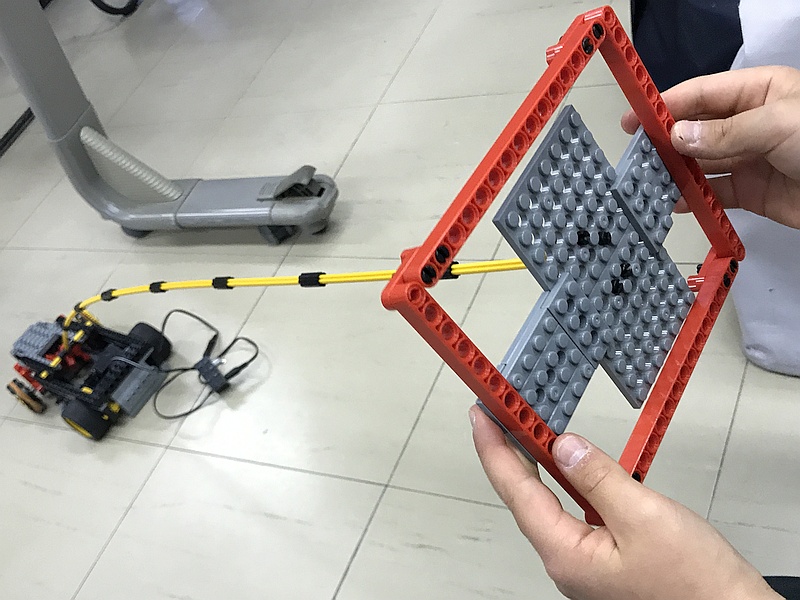
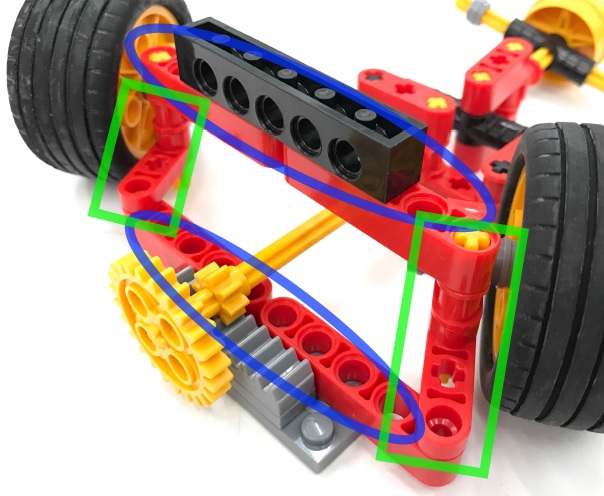 (2) 平行リンク
(2) 平行リンク左右のタイヤの舵角が揃(そろ)う仕組みは、平行リンクと呼ばれる機構です。
左右に動くラックギアが平行リンクの外形を長方形にしたり、それを潰(つぶ)して平行四辺形にしたりしますが、いずれにせよ、4辺は平行のままですね。
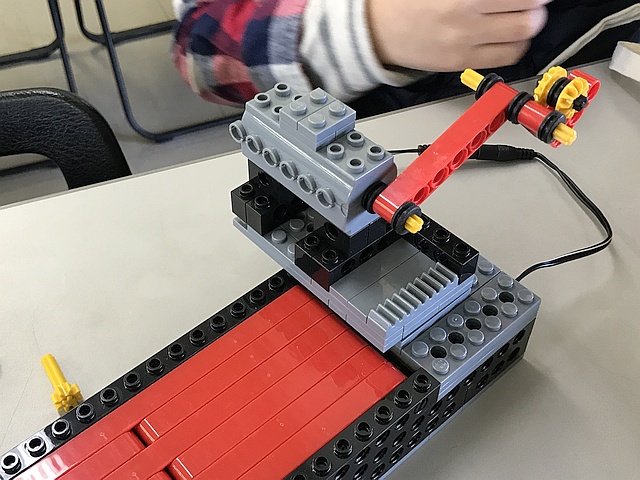
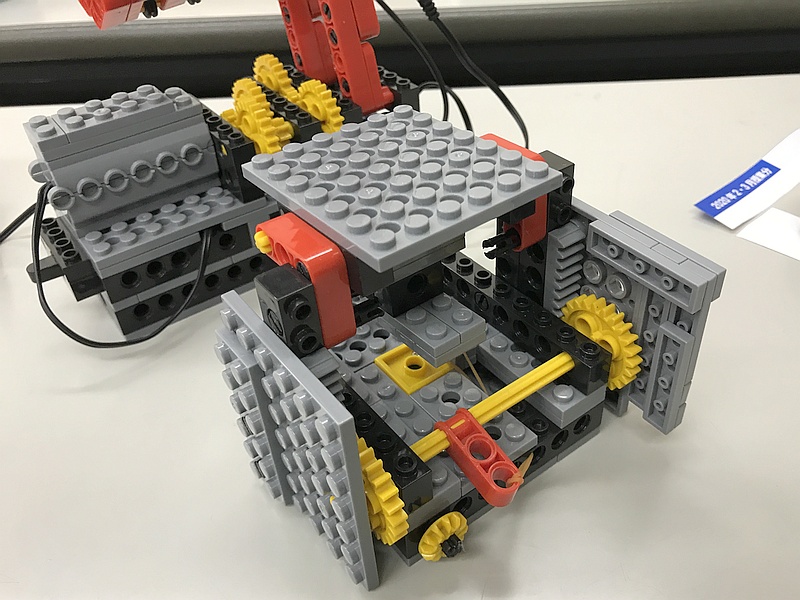
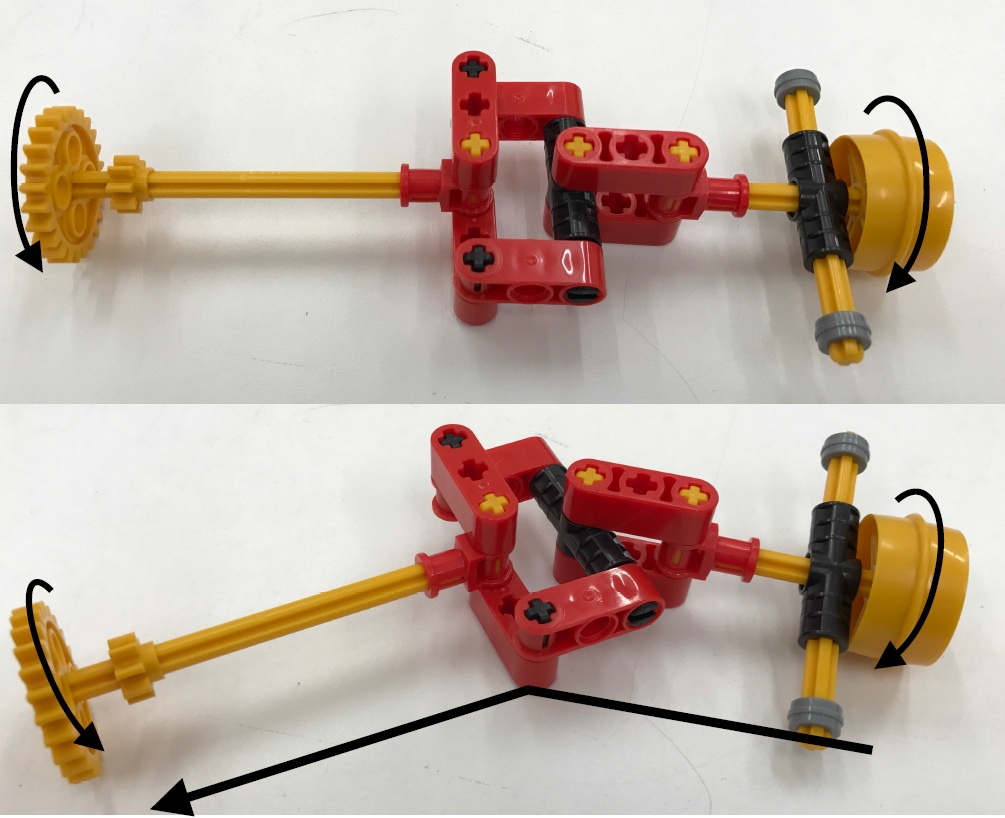 (3) ユニバーサル・ジョイント(自在継ぎ手)
(3) ユニバーサル・ジョイント(自在継ぎ手)ピニオンギアを回転させるシャフト(水平方向)と、ハンドルを回転させるシャフト(後方斜め上方向)は、同一直線上になく、途中で折れ曲がって接続しています。
ハンドルを上下左右に揺らしても問題なく操舵(そうだ)できます(*3)。
チェーンや多数のギアを介さず、駆動力を数本のシャフト(棒)で遠方の異なる方向に伝達できる点で、これは大発明なのです。
なぜそのようなことができるのか、言葉で説明するよりじっくり観察しましょう(*4)。
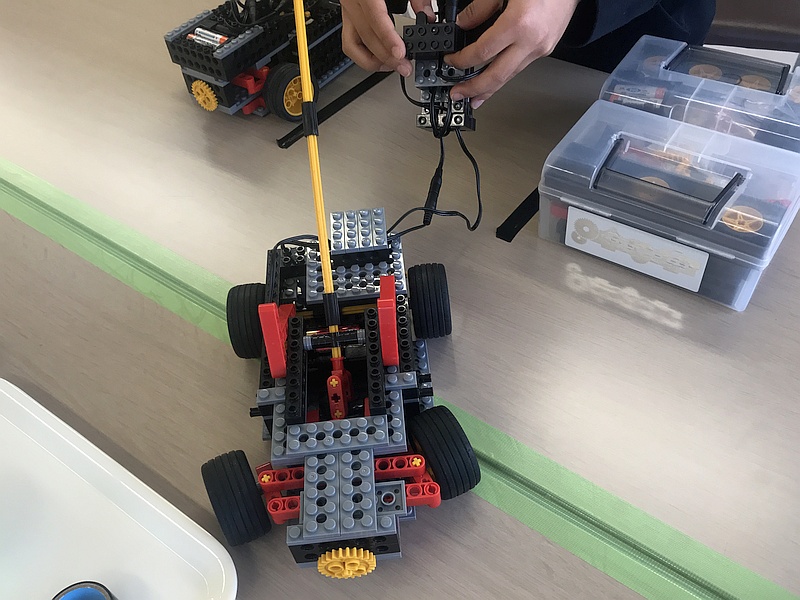 さて、学ぶべき点の多いリアルなモデルカーでしたが、授業最後の競技は“運転技能”。
さて、学ぶべき点の多いリアルなモデルカーでしたが、授業最後の競技は“運転技能”。マリオカートで鍛えてるって言ったって、車庫入れしたこと、ないでしょ?
教習所さながら、狭い角を曲がり、障害物を避け、脱輪にも注意しながら、狭いスペースに縦列(じゅうれつ)駐車や、後ろ向きに駐車するまでの時間を競いました。
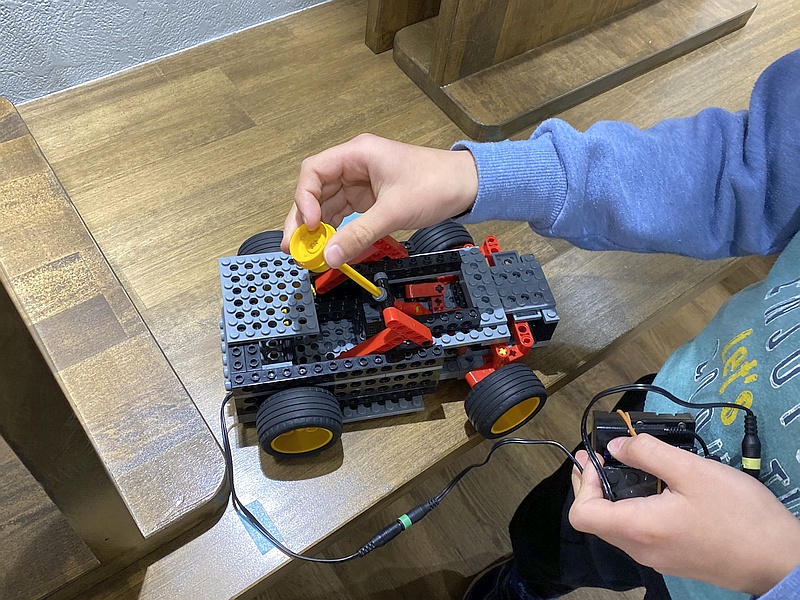
 操縦性を高め、速く走らせるポイントは以下の通り。
操縦性を高め、速く走らせるポイントは以下の通り。・あまり屈(かが)まずに済むよう、ステアリングシャフトをびよ~んと延長
・電池ボックス/スライドスイッチを延長ケーブルでつないでリモコン化(2日目テキスト)
・アクセルペダル代わりにタッチセンサー(黒)を直列につなぎ、前進⇔後退の切り替え時のみスライドスイッチを操作
・全長(前後輪の軸間距離)を短く、小回りに(*5)
・直進時のスピードアップに、減速比の緩和(*6)
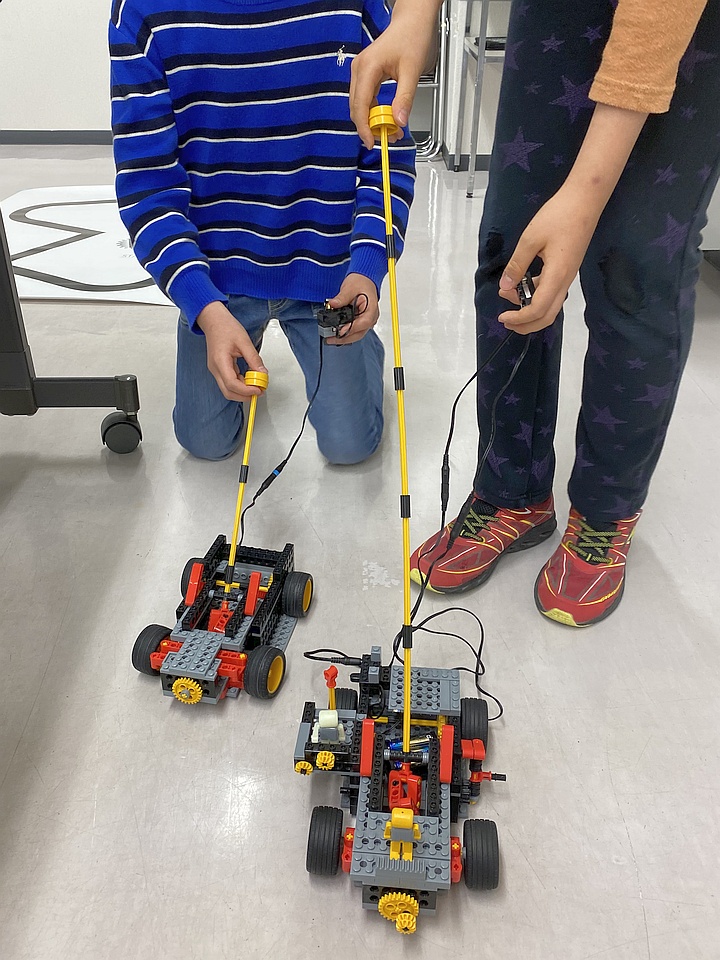
 やはり、バックでの運転には慣れていないようで、ハンドルの“切り返し”を忘れて同じ場所を行ったり来たり、入れやすいフロント部から突っ込んで、どつぼにはまる例も…。
やはり、バックでの運転には慣れていないようで、ハンドルの“切り返し”を忘れて同じ場所を行ったり来たり、入れやすいフロント部から突っ込んで、どつぼにはまる例も…。タイムには数倍の開きがありましたが、崖から落ちずに駐車できただけ命拾いしました!
*1 若者の車離れが叫ばれる昨今、自動車のプラモデル製作経験は少ないようですね…。
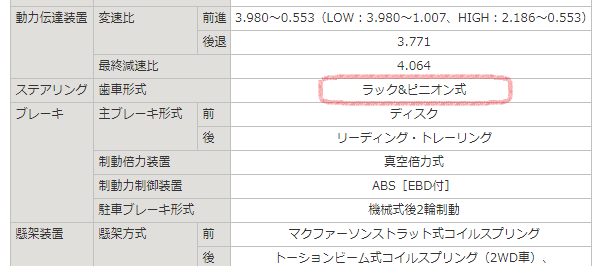 *2 どの自動車カタログにも逐一「ステアリング形式: ラック&ピニオン式」のように書かれています。もう、「その他に一体何があるんだ!?」っていうくらいに。
*2 どの自動車カタログにも逐一「ステアリング形式: ラック&ピニオン式」のように書かれています。もう、「その他に一体何があるんだ!?」っていうくらいに。学んだ仕組みに実感が沸きますので、是非、Webカタログを見てみましょう。
できればお使いの車を検索して。スペック中の諸元表にあります。
<参考> http://www.suzuki.co.jp/car/alto/detail/spec.html
*3 実車でも“チルト・ステアリング”といって、運転者の背丈に合わせてハンドルの上下位置を調整できるようになっているものがあります。
また、サスペンションにより上下に揺れる車輪へエンジン動力を伝えるドライブシャフトにも使われています。
*4 さらに興味が湧いたら、インターネットで調べてみましょう。問題点もあります。
<参考> https://ja.wikipedia.org/wiki/%E8%87%AA%E5%9C%A8%E7%B6%99%E6%89%8B
*5 自動車用語で、「ホイールベースが短いので、最小回転半径が小さい」と言います。
2017年3月・2018年9月に中間教室で見られた、この真っ当なアイデアの体現と効果に驚かされました。
*6 テキストでは1/5(ピニオンギア⇒ギアL)ですが、1/3(ピニオンギア⇒ギアM)等に変えて速くできます。
1.4 <アドバンスコース『ピッキングロボ(2)』>
《下記を参照下さい》
http://robocobo.sakura.ne.jp/blog/robot/adv1-1803.pdf

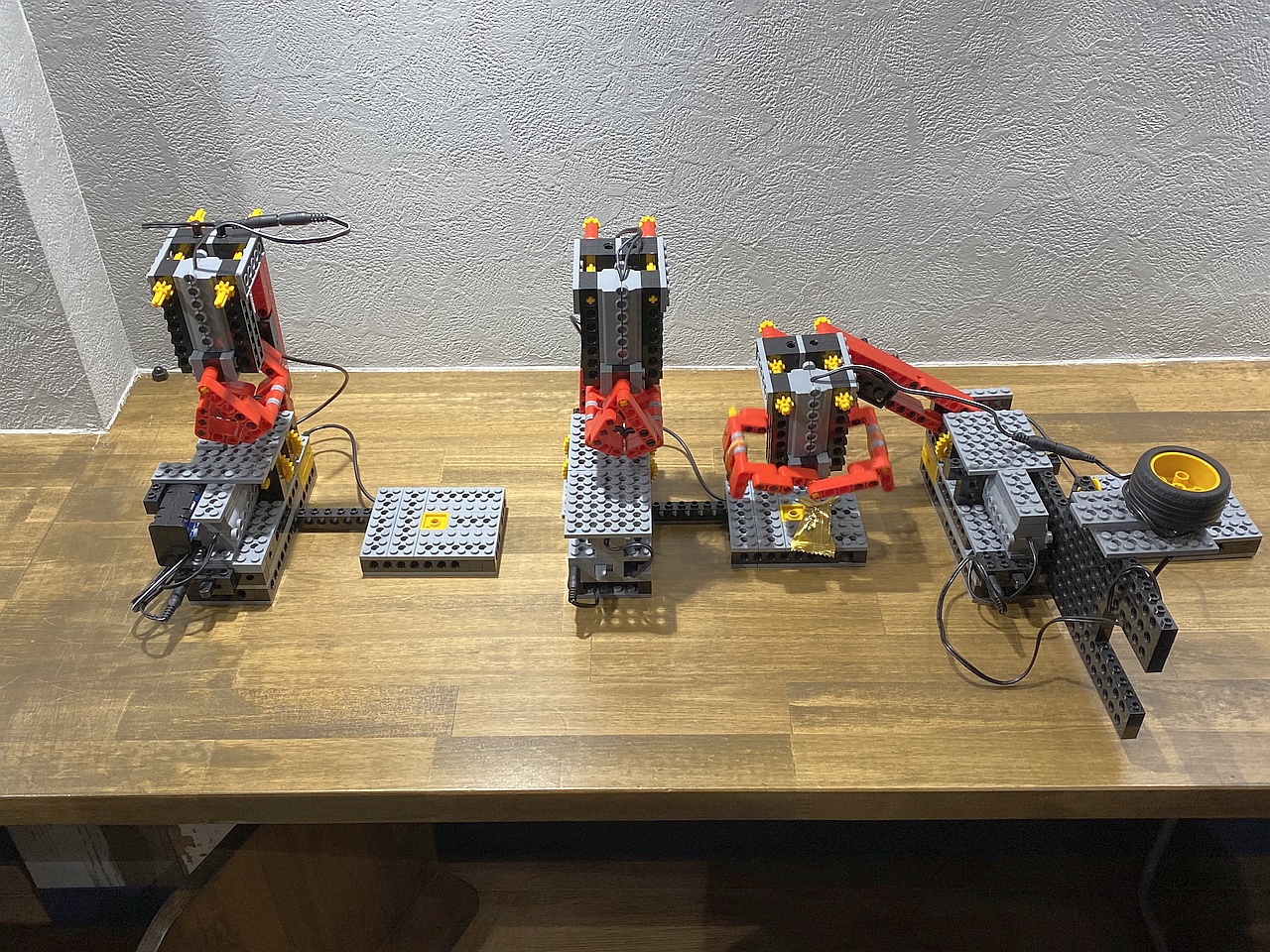



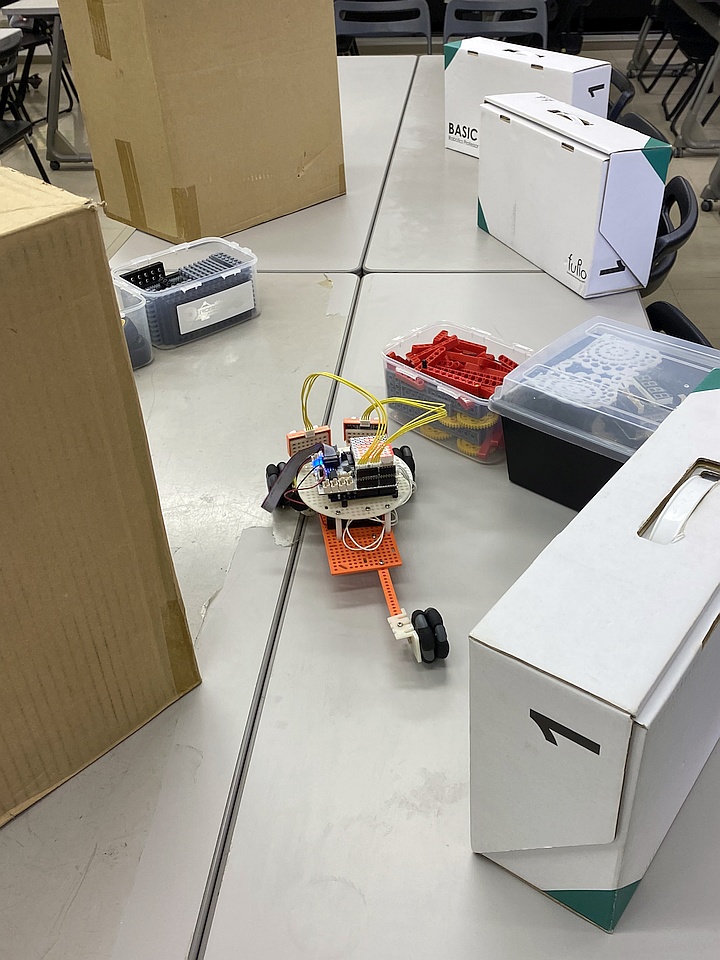
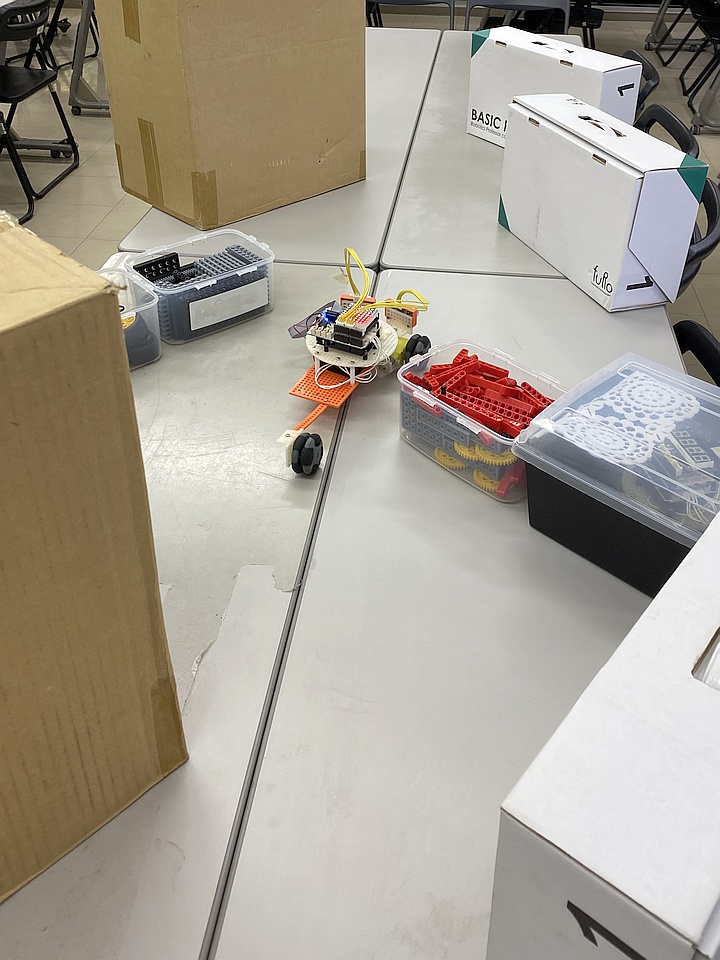
1.5 <プロ1年目コース『不思議アイテムI-2(3)』>
冬タームの最終月を「ウルトラソニックロボット」で仕上げます。
自律型ロボットといえば、障害物や段差を感知して、衝突や落下を回避しながら進むものを先ず想起するのではないでしょうか。
お掃除ロボット『ル○バ』などもそうですね。
感知に最も良く使われるのが、この超音波センサーです(*1)。
イルカやコウモリ等の生物から魚群探知機まで、反射音(方向・時間・強弱・周波数)の状態や変化を探ることで、視覚の代わりに(時にはそれ以上に)なるのです。
反響定位(エコーロケーション)と呼ばれますが、本ロボットや一般の障害物センサーでは、そこまでの解析能力はありません。
特定方向の(一定以上の大きさの障害物から)反射音が返ってくる時間(=距離)だけを計測しています(*2)。

 1日目では、2つのセンサーを別々にモニターすることでの可能性を垣間(かいま)見ました。
1日目では、2つのセンサーを別々にモニターすることでの可能性を垣間(かいま)見ました。センサー1つでも、手をかざせば近寄り、近づけすぎると後ずさるなどプログラムできますが、両目のように左右に並べれば、左右の(状況の違いが分かる)感覚を生み出せます。
左右での感知距離(dist1, dist2)の差に応じて旋回させれば、かざした手の方向にフラフラと追跡するまでになります[step3]。
しかし、2つの距離情報を扱うのは、プログラムの条件文(判定式や分岐)が複雑になります。
センサー情報を2値(デジタル判定)化するだけでも2×2=4通りに場合分けされることのみならず、スマートな動きを実現するには、センサー2個の変化・判断の順序やタイミングなど、気にすることが増えるからです。
2日目では、センサー1つを様々な位置に取り付け、プログラムを適応させることで、
・ 障害物を避けるロボット[avoider]
・ 机から落ちないロボット[nofall]
・ 机の端を沿うロボット [tablerunner]
・ 壁ぎわを沿うロボット [walltracer]
を実現できることが紹介されています。
あの『ル○バ』に勝るとも劣らず、生き物らしく見えるでしょう。
センサーで拾うたった1つの値と、それを条件に動作を分ける論理(プログラム)とで、これだけの(これ以上の)ことができます。
どれも、プログラミングのレベルに大差ありません。
ちょっと難しく見える“おまじない”や数値処理上の工夫(*3)がありますが、核心の論理“if(条件) {動作1;} else {動作2;}”は、非常に単純明快で必然的なものです。
もっと場合分け(条件分岐)したければ、“if(条件1) {動作1;} else if(条件2) {動作2;} else if(条件3) {動作3;} else {動作4;}”等ですね。
怖(おじ)けずに、自分のロボットに命を吹き込んでみてください。
君こそがフランケンシュタイン(怪物の創生者)であり、鉄腕アトムのお茶の水博士なのですから。
*1 GHz級クロックの電子回路など、技術の発達した現在では、光(電磁波)を用いたレーザー距離計やGPSセンサーも安価に手に入るようになりましたが、生物の感覚器官ではとても追いつけません。視覚が光を利用するのとは別の話ですよ。
*2 音の伝わる速さとして、空気中で340m/秒、水中で1500m/秒を覚えておきましょう。
すなわち、地上と水中で計算式が変わりますが、時間から距離が求まります。
*3 dist/=10; または dist=dist/10; で dist値 1~99[cm] を 0~9(整数) に粗くし、大雑把に扱えるようにしています。
例えば、if(dist==1) と書くだけで 10~19[cm] の範囲を指定することができるようになります。
2. 3月の課題
<スタートアップ(全コース)>
特にありません
<プライマリーコース>
- オリジナル図形プリント
http://robocobo.sakura.ne.jp/blog/HW/RobotP2003-Q.pdf
<ベーシックコース>
- 上記授業内容を精読する(概ね3年生以上/低学年は補助の下で)
- オリジナル課題プリント(3面図のみ/設問なし)
http://robocobo.sakura.ne.jp/blog/HW/RobotB2003-Q.pdf
<ミドルコース>
- 上記授業内容を精読する
- オリジナル課題プリント(3面図+設問)
http://robocobo.sakura.ne.jp/blog/HW/RobotM2003-Q.pdf
<アドバンスコース>
- 上記授業内容を精読する
- オリジナル課題プリント(見取図+設問)
http://robocobo.sakura.ne.jp/blog/HW/RobotA2003-Q.pdf
<プロ1年目コース>
- 上記授業内容を精読する(該当テキストページを見ながら)
- 単一距離センサーロボット[avoider/nofall/tablerunner/walltracer]のいずれかを改良し、ダブル距離センサーロボットとして、より洗練された動きを設計・実装する
例えば、
・壁と壁の間を往復するプロ版“う王さ王”[avoider改]
・左/後退/右から安全な方向を選ぶ [nofall改]
・左/直進/右を選びつつ崖っぷちを沿う [tablerunner改]
・左/直進/右を選びつつ壁伝いに迷路を進む[walltracer改]
【重要】
課題プリントの印刷/提出ルールについて、お知らせをご覧下さい。
3. 2月の解答
<プライマリーコース>
http://robocobo.sakura.ne.jp/blog/HW/RobotP2002-A.pdf
<ベーシックコース>
http://robocobo.sakura.ne.jp/blog/HW/RobotB2002-A.pdf
<ミドルコース>
http://robocobo.sakura.ne.jp/blog/HW/RobotM2002-A.pdf
<アドバンスコース>
2ヶ月目(今月)配信の為、2月はありませんでした(4月より1ヶ月目配信に変更予定)
4. 今後の授業スケジュール
◆小倉北4/5は『リファレンス小倉魚町貸会議室』で開催します。
◆全教室4/11~26の開催を中止します(4/9決定)。
◆5月は一週ずつ遅れます(小倉南5/10を除く)。
――――――――――【佐藤教室長】――――――――――
[東福間]第1・3土原則<学習ルームでこぼこ>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドバンス
⇒ 4/4, 18(中止), 5/9, 23, 6/6, 20
[中間]第2・4土原則<なかまハーモニーホール>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドバンス
⇒4/11※第1回 中止
4/25※第2回 中止
5/16, 30, 6/13, 27
※4/11, 25の開催を中止します。
[小倉北]第1・3日原則<ムーブ>
- 10:30~ ベーシック/プライマリ
- 13:00~ ミドル/ロボプロ2年目
- 15:00~ アドバンス
⇒4/ 5※第1回 リファレンス小倉魚町貸会議室4F 405
4/19※第2回 中止(ロボプロを除く)
5/10, 24, 6/7, 21
※4/5はムーブ臨時休館の為、代替施設で開催します。
※4/19の開催を中止します(ロボプロを除く)。
――――――――――【中野教室長】――――――――――
[八幡東]第1・3土原則<レインボープラザ4F>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドバンス
⇒ 4/4, 18(中止), 5/9, 23, 6/6, 20
[小倉南]第2・4日原則<総合農事センター2F>
- 10:30~ ベーシック/プライマリ
- 13:00~ ミドル
- 15:00~ アドバンス
⇒ 4/12(中止), 26(中止), 5/10, 31(24から変更), 6/14, 28
5. お知らせ
1) 課題プリントのコンビニ印刷[再掲]ユーザー番号「DA2XCQKMNP」にて印刷できます。
<ローソン・ファミリーマート手順>
https://networkprint.ne.jp/sharp_netprint/ja/howto_doc_convini.aspx
<要約>
1.「ネットワークプリント」を選択
2. ユーザー番号「DA2XCQKMNP」を入力
3.「文書プリント」を選択
4. 所定コースの課題PDFのみ印刷
(「カラー」「両面印刷/横とじ」を推奨)
2) 課題プリントの印刷/提出ルール[再掲] ※重要ポイント
・当月の課題プリントは2回目の授業日前後(月報より前)にメール配信します
・印刷はモノクロで問題ありませんが、カラーを推奨します
※なるべく両面印刷で、片面2枚の場合は「必ずホチキスで綴じて」下さい
裏面には記名欄がなく、別紙では採点/返却できません
※提出期限は「次月1回目の授業日まで」とします
・提出者には従来通り採点して返却します
・点数分のポイント色カードを進呈し、3ヶ月毎の景品交換に使います
※正式な解答は「次月の課題プリント配信で公開」します
・自主性に任せ、強制しません
3) コロナウイルス趨勢に鑑みたロボット教室の開催指針
団塊世代が子供の時代から日本に莫大な元気を届けてこられた志村けんさんをはじめ、闘病の末に絶命された方にお悔やみ申し上げます。
一方、昨今の定量的論拠が明確ではない自粛要請の傍ら、未だ「休業補償を検討する考えを表明」等の無慈悲なニュースが飛び交い、経済的・精神的な苦悩から脱却するには一刻の猶予もない方々にも心を痛めます。
我々民間事業者にも厳しい情勢が続いております中、皆様には、ロボット教室が「不要・不急な経済活動」に当たらないことを確信するに足る多くのご支持・ご協力を賜り、感謝の気持ちでいっぱいです。
マスコミや世論の、社会課題に対峙するには幾ばかりか狭量な見解は連日のワイドショーやSNSコメントで知れますので、下記のような信頼できる識者の科学的分析や提言も参考に、
教室運営側としては、感染リスクを高める3条件(密閉・密集・密接)が重ならないよう配慮した上で、現時点では自粛すべき状況にはないと判断しております。
ただ、ご高齢者・基礎疾患をお持ちの方との接触密度など、ご家庭ごとにリスク評価すべき環境条件は異なりますので、各位にてご判断の上、ご参加下さいますようお願い申し上げます。
―――― 思慮深い科学的分析および提言の例 ――――
◆【武田邦彦】重大なお知らせ。今日を最後に・・・
武田邦彦 テレビじゃ言えないホントの話!
https://www.youtube.com/watch?v=xzpRfqbFuwc
◆リスク・マネジメントに基づく「新型コロナウイルス対策」の提案【京都大学レジリエンス実践ユニット】(解説:藤井聡ユニット長)
藤井聡
https://www.youtube.com/watch?v=GrfbIYOlSTE
4) 2月課題 高得点者 []内は教室と学年
◆プライマリ【14名平均 図形3.3】
5点…早野[東福間 年長], 藤原[八幡東1], 柴田[小倉北2], 鑓水[小倉北 年長], 山家[小倉南2]
◆ベーシック【22名平均 図面2.9+設問2.6=5.5】
10点…なし
9点…藤津[中間3], 中村[小倉北5]
8点…山崎[小倉南4]
◆ミドル【12名平均 図面2.9+設問2.0=4.9】
10点…なし
9点…橋本[小倉南2]
8点…なし
7点…荻山[小倉南5]
東福間・中間・小倉北教室 佐藤 / 八幡東・小倉南教室 中野