2.2月の課題
3.1月の解答
4.今後の授業スケジュール
5.お知らせ
1. 2月授業内容
1.0 <スタートアップ(全コース)>
割愛します。
1.1 <プライマリーコース『ロボドーザー』>
割愛します。



1.2 <ベーシックコース『クルクルクリエイター』>
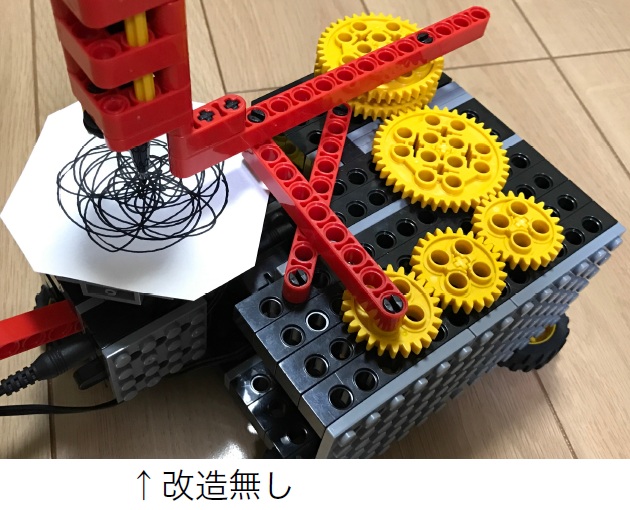
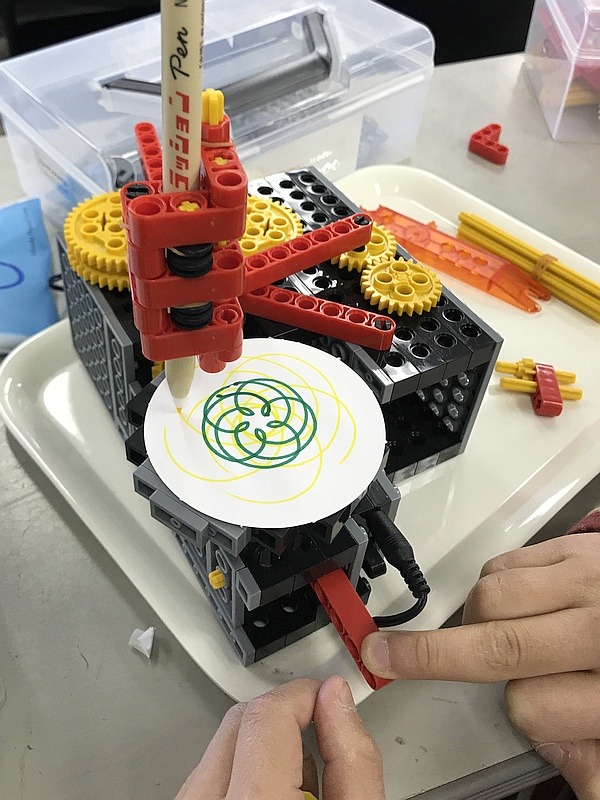
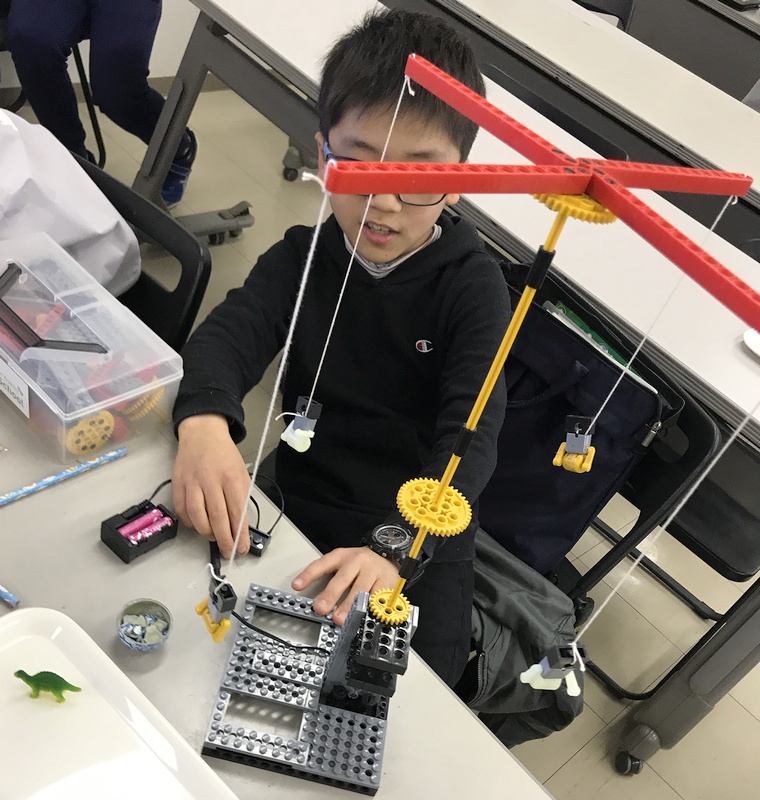
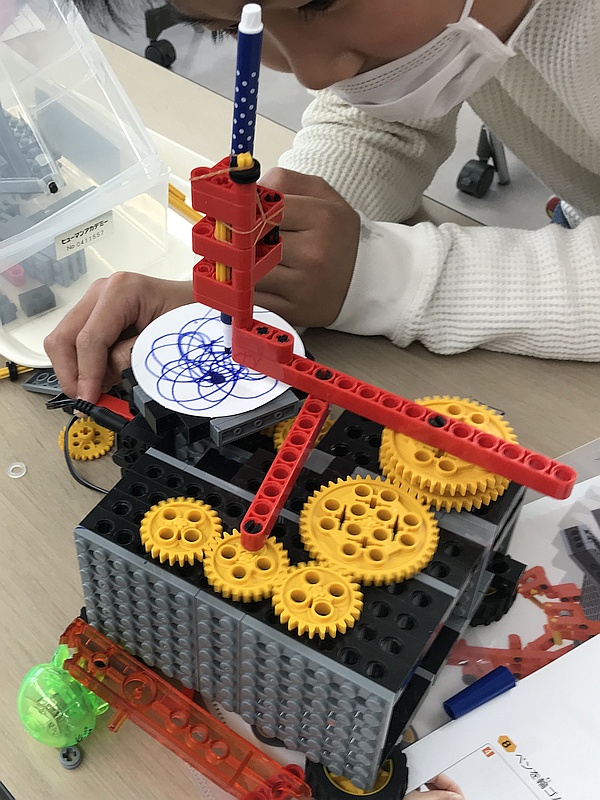 第4回アイデアコンテスト全国大会(2014年)ベーシックコース最優秀賞作品「御家紋(ごかもん)くん」(当時小2)がベースの、自動お絵かきマシンです。
第4回アイデアコンテスト全国大会(2014年)ベーシックコース最優秀賞作品「御家紋(ごかもん)くん」(当時小2)がベースの、自動お絵かきマシンです。このアイデアは凄(すご)いですね。そして難(むずか)しいですね。
作るのも、動かすのも、アドバンスコース、いや、それ以上かもしれません(*1)。
詳(くわ)しい原理は難しすぎるので、「いっそベーシックコースで、深く考えずに、いろいろ試(ため)して遊びましょう」といった感じです。
 単純なギアの回転運動(*2)から、コースター紙にずいぶんと複雑な模様(もよう)を描(か)けるもんだな、と思いましたか?
単純なギアの回転運動(*2)から、コースター紙にずいぶんと複雑な模様(もよう)を描(か)けるもんだな、と思いましたか?そうです、それは大事な発見です(*3)。
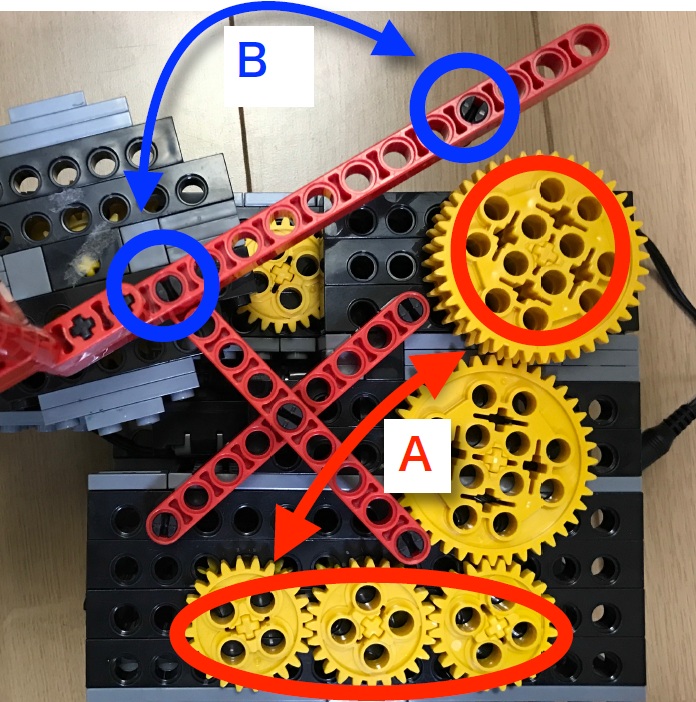
しかも、下記を変えることで、また模様が変わります。
A) 回転するギアLとギアM3枚のペグ穴のうち、どこに2個のペグSを挿(さ)すか
B) ペンホルダーのロッド15アナとロッド9アナのどこに2個のペグSを挿(さ)すか
A)では、主に模様が変わります。B)では、主に大きさが変わります。
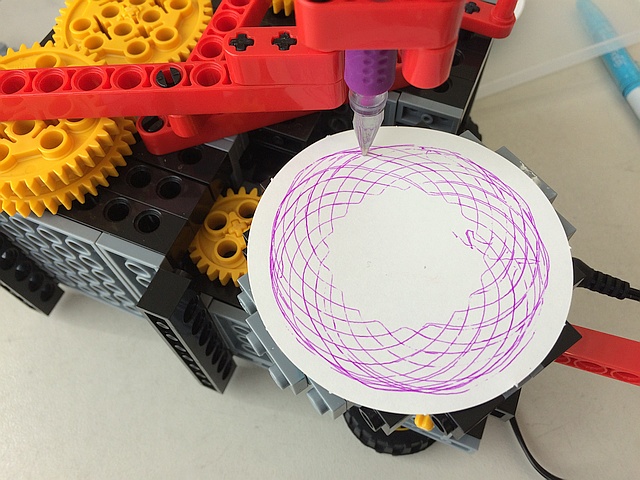
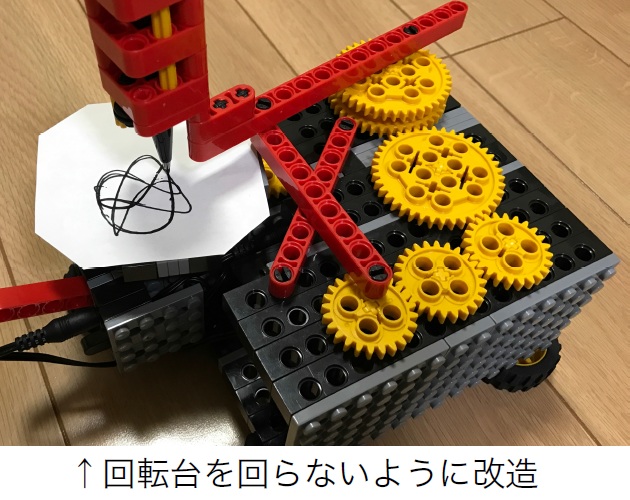 回転台を回らなくする改造(テキストp.25)で、ペン先の軌跡(きせき)が見えてきますが、これだけでは面白くないですね。
回転台を回らなくする改造(テキストp.25)で、ペン先の軌跡(きせき)が見えてきますが、これだけでは面白くないですね。ペン先を回すのとは違うタイミングで台紙を回転させることで、複雑な模様が表れているのです。
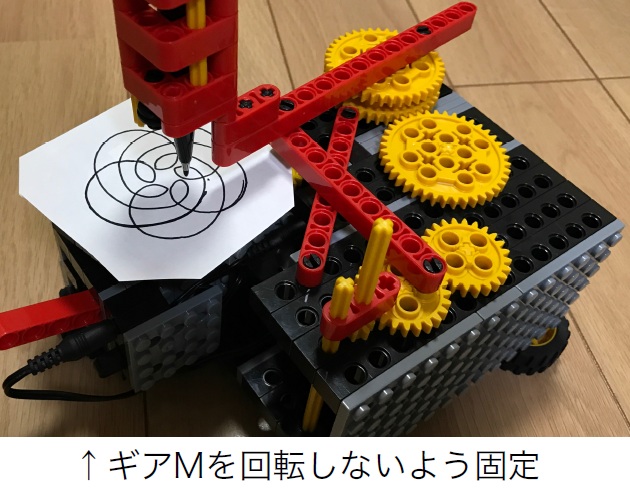
 模様が複雑すぎて美しくないと思う場合は、ペン先の動きをもっと単純化しましょう。
模様が複雑すぎて美しくないと思う場合は、ペン先の動きをもっと単純化しましょう。ペン先の動きが複雑なのは、ギアLとギアMの回転数が異(こと)なり、2個のペグSが異なるタイミングで回るからです。
ギアMへ回転を伝える中間のギアLを外して、ギアMを回転しないよう固定すると、よりシンプルな幾何学(きかがく)模様になります(*4)。
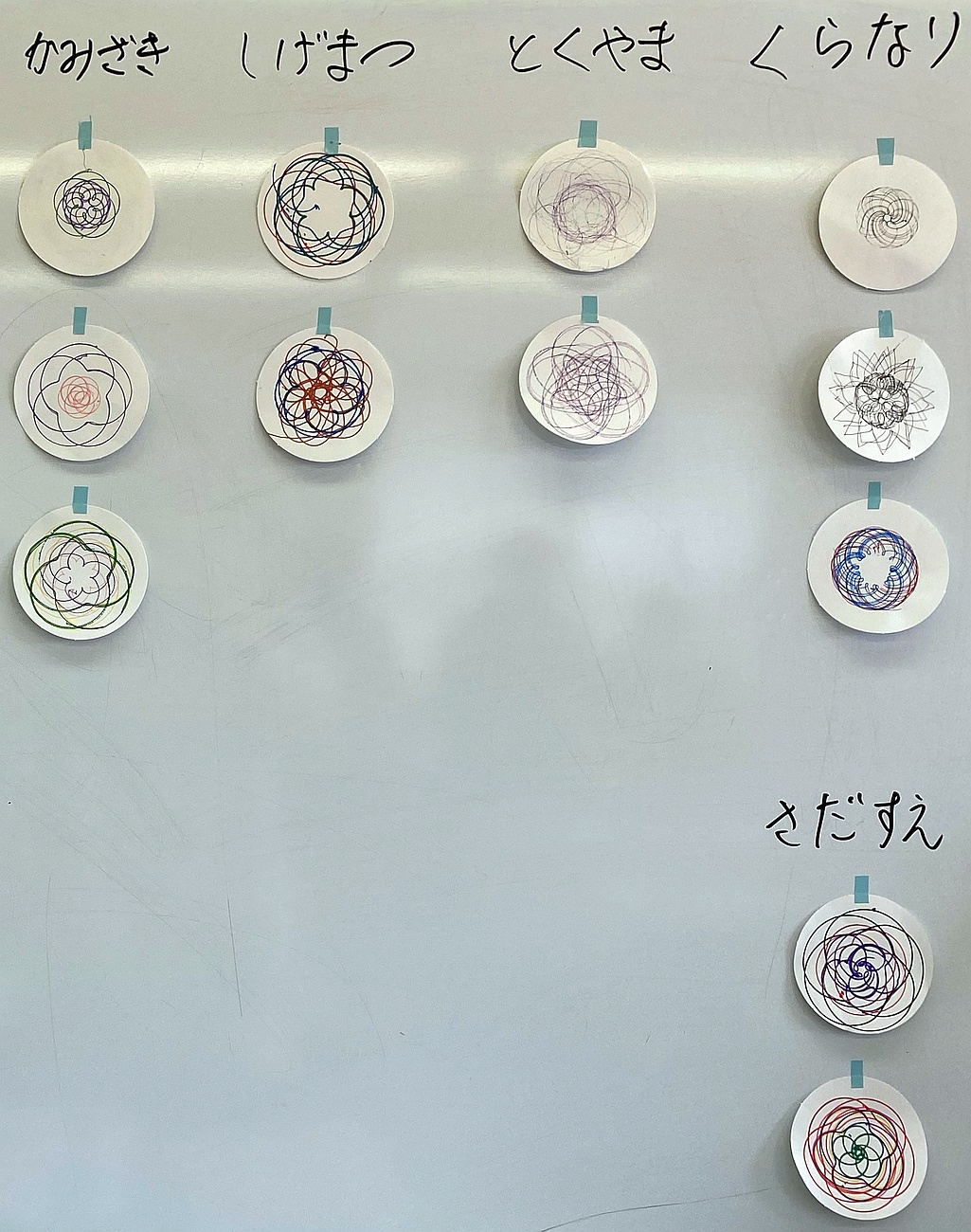
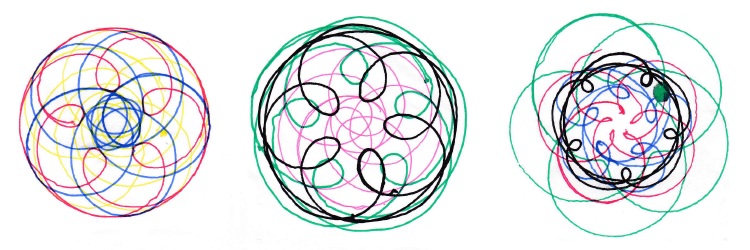
 ペン先が一度描いた軌跡に戻(もど)ったら(*5)、ペンの色と、A) や B) を変えて、また描きます(*6)。
ペン先が一度描いた軌跡に戻(もど)ったら(*5)、ペンの色と、A) や B) を変えて、また描きます(*6)。この方が綺麗(きれい)ですね。オリジナルのコースターを描いて、家族や友達にプレゼントしましょう。細い油性ペンがいいよ(*7)。


 *1 どんな模様になるかを予想するのは、高校生でも、大学生でも、大人でも(先生でも)超難しいです。
*1 どんな模様になるかを予想するのは、高校生でも、大学生でも、大人でも(先生でも)超難しいです。*2 本当に大事なのは、ギア上に留(と)めたペグの周回運動をリンク棒(ロッド)で取り出していることです。
 *3 単純な動作でも、たくさん組み合わせると、複雑な処理や現象が実現します。
*3 単純な動作でも、たくさん組み合わせると、複雑な処理や現象が実現します。神経細胞が集まって脳を形作るように、電卓やコンピュータも、「~の反対!(NOT)」と「両方ともON?(AND)」のたった2種類の信号処理部品を組み合わせて作ることができます。
だから、この世の地形や現象、人間の行動さえも、単純な法則の組合せで成り立っているとする研究があり、今も続いています。
*4 このとき、ペン先の動きは単なる楕円(だえん)形になります。
*5 回転数の比は、元々、回転台:ギアL:ギアM = 1/5:1/3:5/9 = 9:15:25 なので、コースター紙が9回転して元の軌跡に戻ります。
ギアMを留(と)めて単純化すると、回転台:ギアL = 1/5:1/3 = 3:5 なので、コースター紙が3回転して元に戻る間にギアL(ペン先)が5回転するので、5枚の花びら模様が表れます。
 *6 一度ペンを外して、ギアL上のペグ穴を4ヶ所90°ずつ変えて(回転台の54°空回しに相当)また描くだけでも、模様が重なっていい感じになります。
*6 一度ペンを外して、ギアL上のペグ穴を4ヶ所90°ずつ変えて(回転台の54°空回しに相当)また描くだけでも、模様が重なっていい感じになります。*7 細い線の方が、模様が緻密(ちみつ)な感じになります。
また、水性ペンだと、コップの水分で滲(にじ)んでしまい、コースターとして使えません。
1.3 <ミドルコース『クルクルメリーゴーランド』>
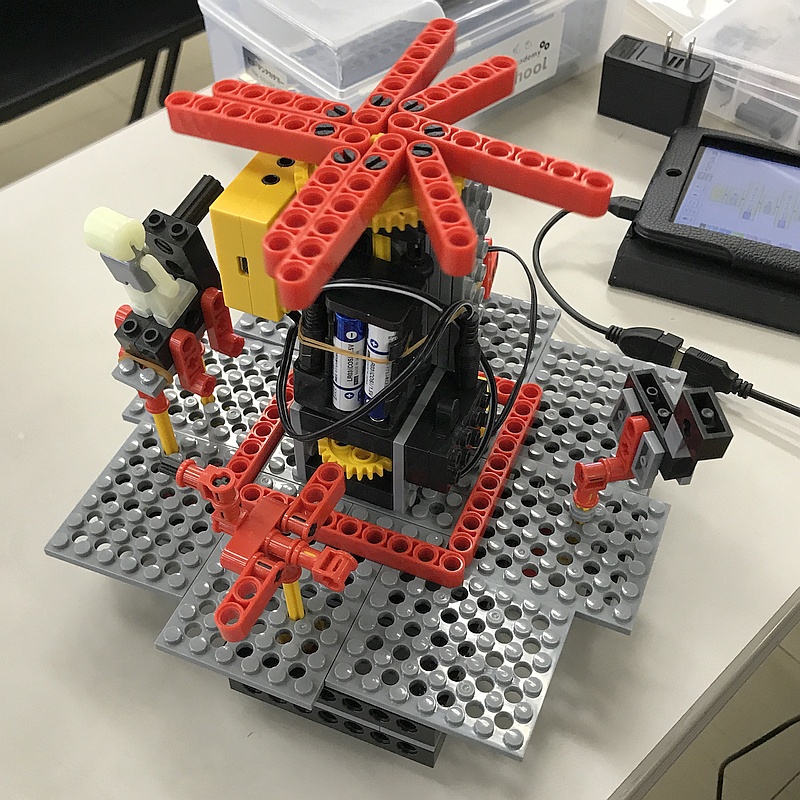 遊園地アトラクションの代表格、メリーゴーランド、いいですね。
遊園地アトラクションの代表格、メリーゴーランド、いいですね。英語的に正しくは「メリー・ゴー・ラウンド」、日本語では「回転木馬」とも言います。
ヨーロッパでは、蒸気機関の時代から親しまれてきました。
華(はな)やかに回る光景に大人も癒(いや)される、何ともノスタルジックな遊具です。
機械の内部は見たことがなくても、経験からステージの回転と馬の上下運動がリンクしていることは分かるでしょう。
およそ唯一(ゆいいつ)の回転動力源を利用した、アナログな機械だと予測がつきます。
ロボットを製作する上で、「実物に沿(そ)った構造か?」は大事ではなく、
「モーター動力を種々の回転運動や上下運動に分配するにはどういう方法があるか?」
を考えるきっかけにできれば良いと思います。
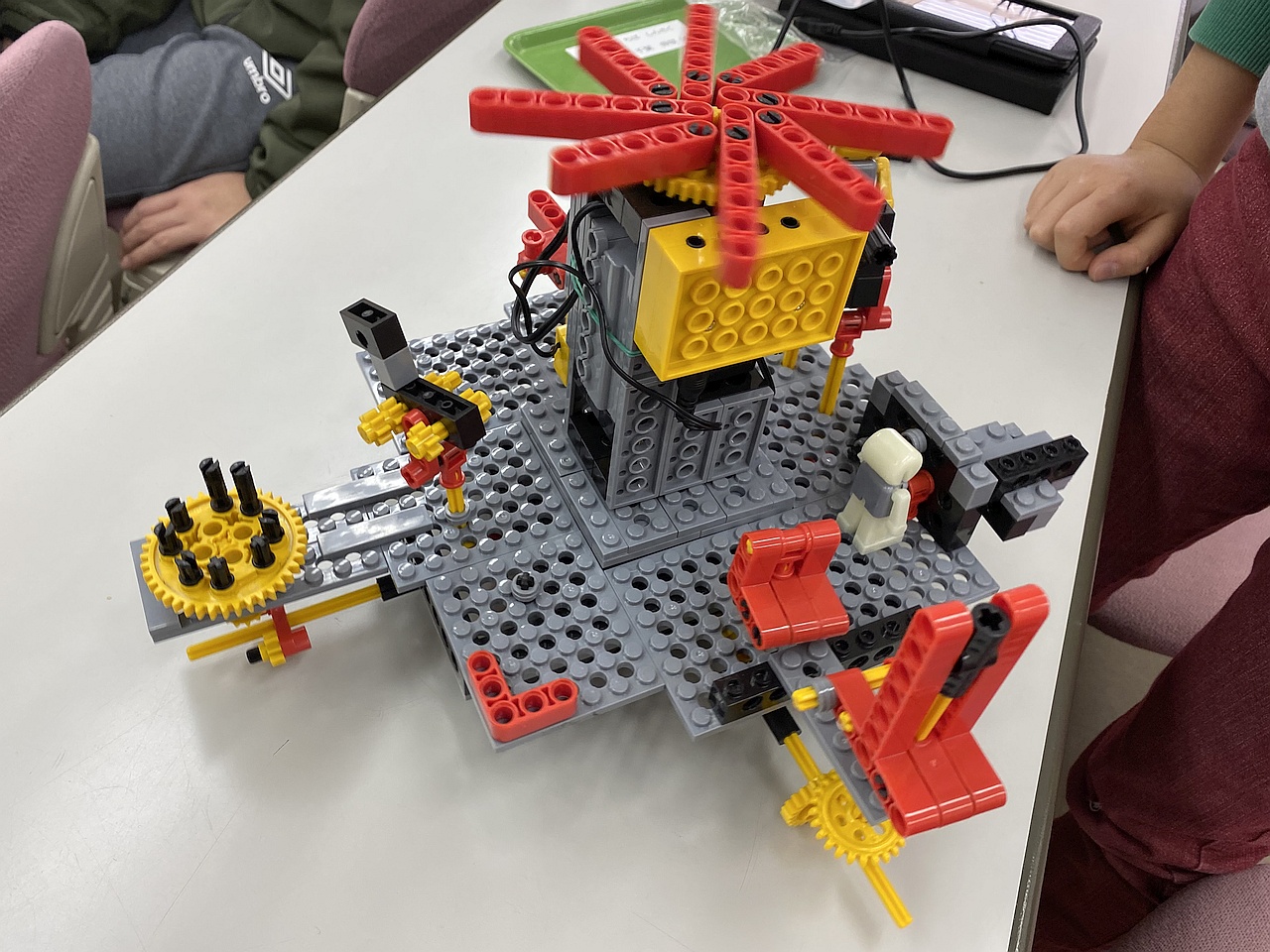
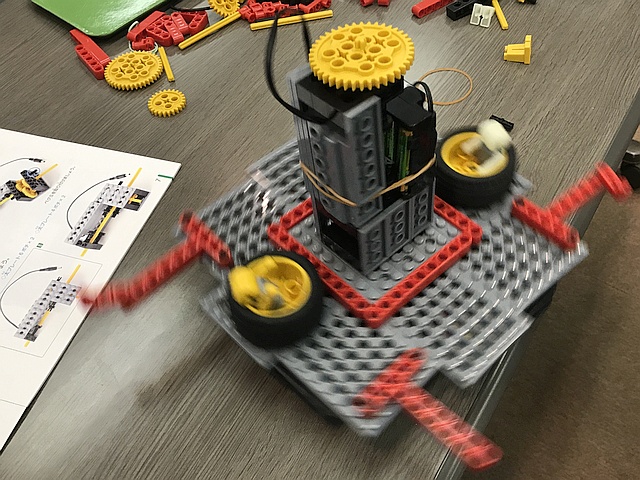
 先ず、地面に寝かせたタイヤLの中心にモーター軸シャフトを挿(さ)して、中央の回転塔を直立させます。
先ず、地面に寝かせたタイヤLの中心にモーター軸シャフトを挿(さ)して、中央の回転塔を直立させます。スイッチを入れると、タイヤLを固定脚にして、回転塔(モーター本体)がゆっくり回りますので、これをステージ中央の穴に挿すことで、ステージも一体化して回ります(*1)。
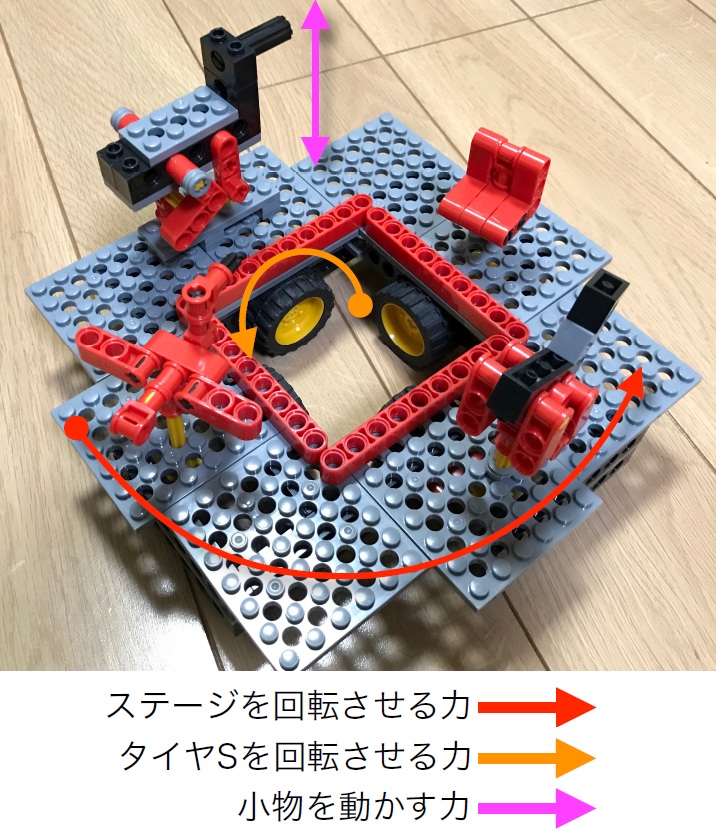
すると、そのステージの回転を支える円周上配置のタイヤS4輪が回り、各タイヤSの回転がステージ上の小物を動かします(*2)。
タイヤの回転が動力源に再利用されているわけで、シャフトやギヤの連結だけが動力伝達手段ではないことを語っています。
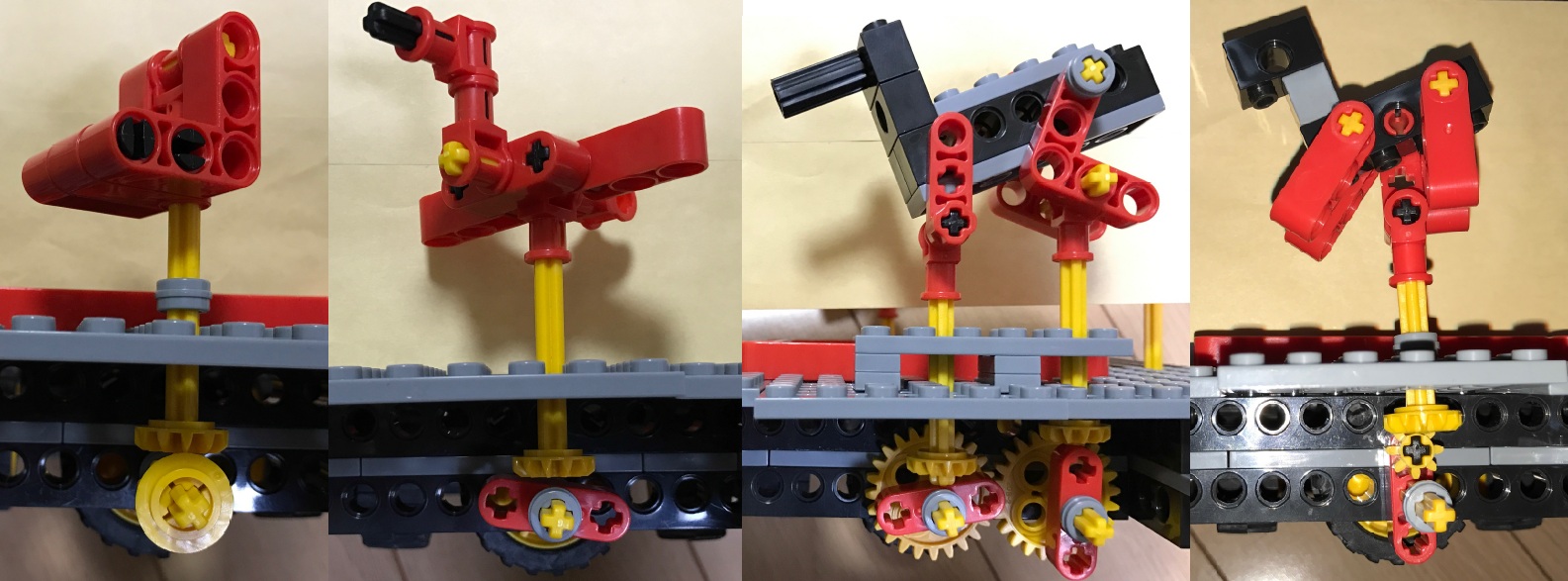 また、ステージ上の小物は、タイヤSの回転から、次のようなバリエーション豊かな運動を実現しています。
また、ステージ上の小物は、タイヤSの回転から、次のようなバリエーション豊かな運動を実現しています。・椅子 … マイタギア(傘歯車)で軸方向を水平→垂直変換して回転
・馬1, 鳥 … ロッド3アナによるカム作用(*3)で上下
・馬2 … その両方による間欠回転
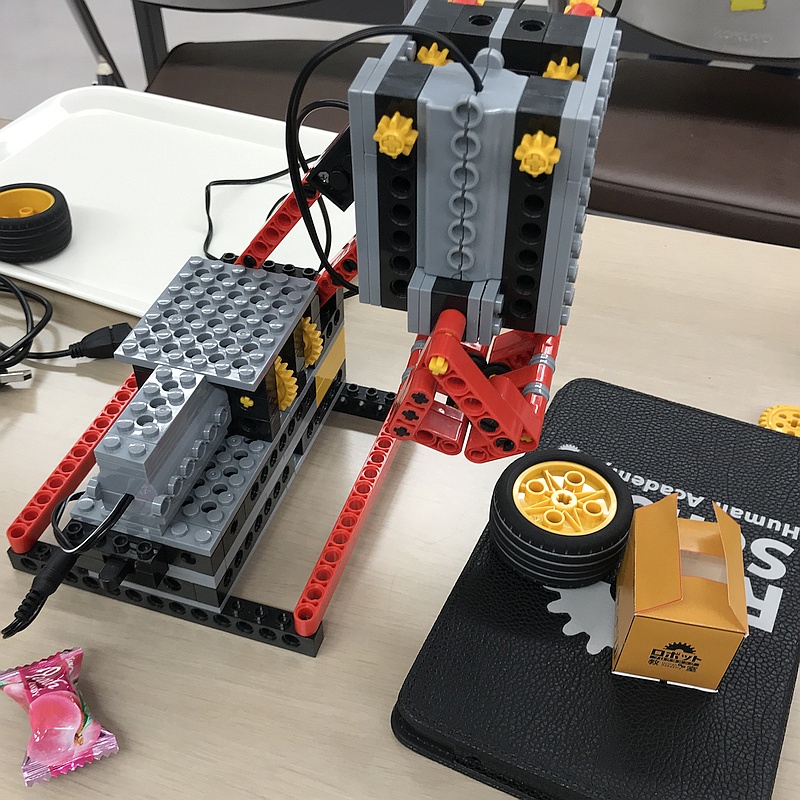
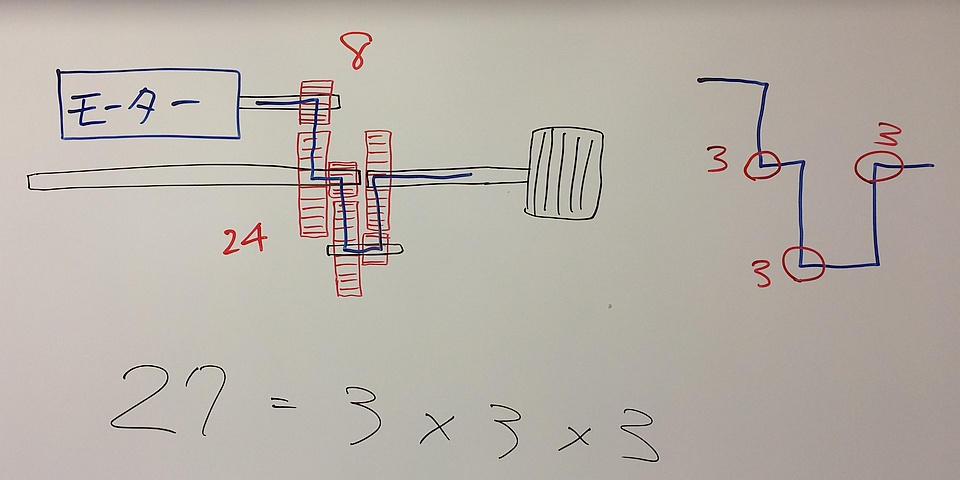 これらの運動は全て、タイヤSの回転を通して、間接的にモーターの負荷(ふか)となりますが、回転塔内にコンパクトに収めた3段の3:1減速ギヤボックス(1/3×1/3×1/3=1/27)が十分な回転トルクを出しますので、力不足の問題はありません。
これらの運動は全て、タイヤSの回転を通して、間接的にモーターの負荷(ふか)となりますが、回転塔内にコンパクトに収めた3段の3:1減速ギヤボックス(1/3×1/3×1/3=1/27)が十分な回転トルクを出しますので、力不足の問題はありません。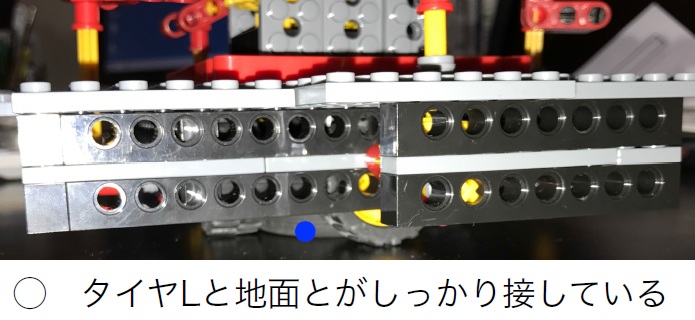
 小物やステージがスムーズに動かない(カクカク動く)場合は、下記の摩擦力に注意します。
小物やステージがスムーズに動かない(カクカク動く)場合は、下記の摩擦力に注意します。・ステージが回らない ⇒ 中央のタイヤLがしっかり接地し(摩擦:大)、ステージ下のタイヤSが軽く回る(摩擦:小)よう調整
・小物が動かない ⇒ 直下のタイヤSを手で回してみて、小物の支柱がスムーズに上下/回転する(摩擦:小)よう調整
優美さを演出するにも、突き詰めれば考察ポイントの多いことが分かるテーマでした。
ちょっと、メリーゴーランドに乗りたくなったでしょ?(先生も…)

 *1 だから、ステージ中央の穴に挿してタイヤLが浮くようならダメですね。
*1 だから、ステージ中央の穴に挿してタイヤLが浮くようならダメですね。*2 実物では、回転ステージ下の狭い空間ではなく、天井のクランクから馬の支柱を吊り下げていることが多いようです。
*3 回転部品(ロッド3アナ)の外形をなぞるジョイント部(シャフトと先端のマイタギア)が生む、周期的な往復運動を利用したリンク作用
1.4 <アドバンスコース『ピッキングロボ(1)』>
《下記を参照下さい》
http://robocobo.sakura.ne.jp/blog/robot/adv1-1802.pdf
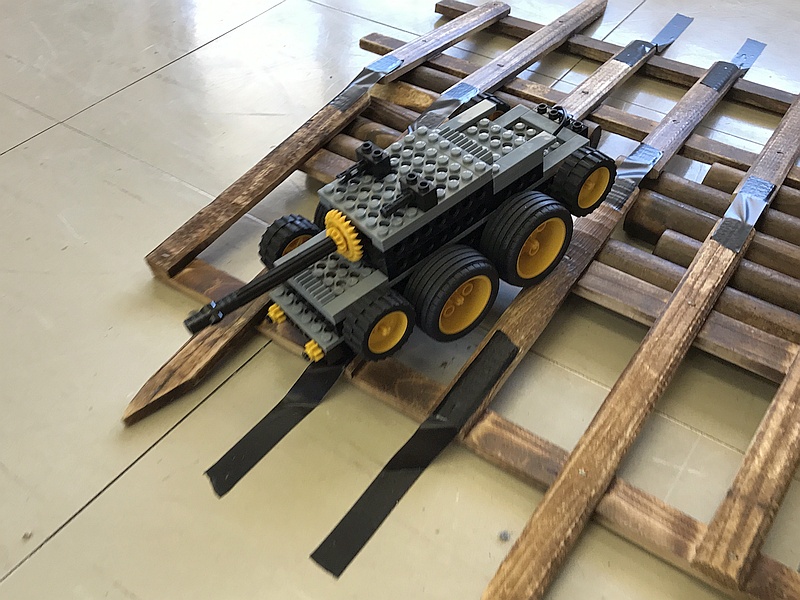
1.5 <プロ1年目コース『不思議アイテムI-2(2)』>
センサー類を駆使する、冬タームの2ヶ月目です。
1日目のテーマは、「ベースロボットの組み立て」です。
何のことはない、左右両輪(2モーター)を独立駆動して、前進・後退・左右旋回を自在にこなす土台のロボットを製作します(*1)。
戦車型ラジコンプログラム[Tank]を転送して操縦したり、時間制御プログラムで決まったコース(円・四角・8の字など)を自動的に走らせることはできますが、まだセンサー類が無いので、外界からの入力情報を基に“考える”ことはできません。
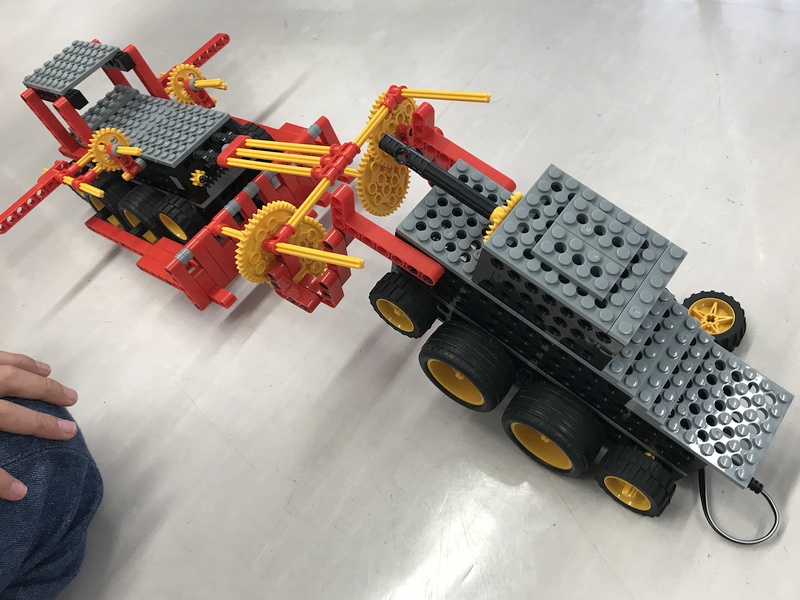
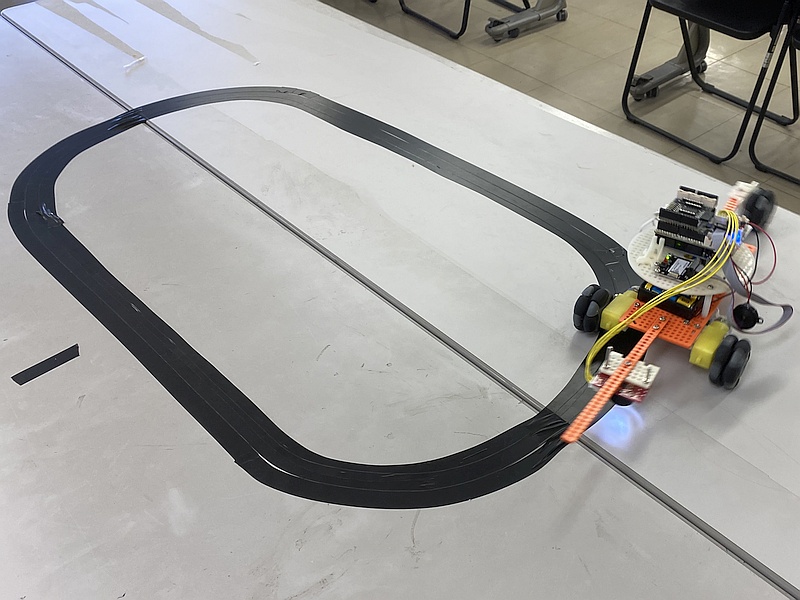
2日目のテーマが、「カラーセンサーロボット」です。
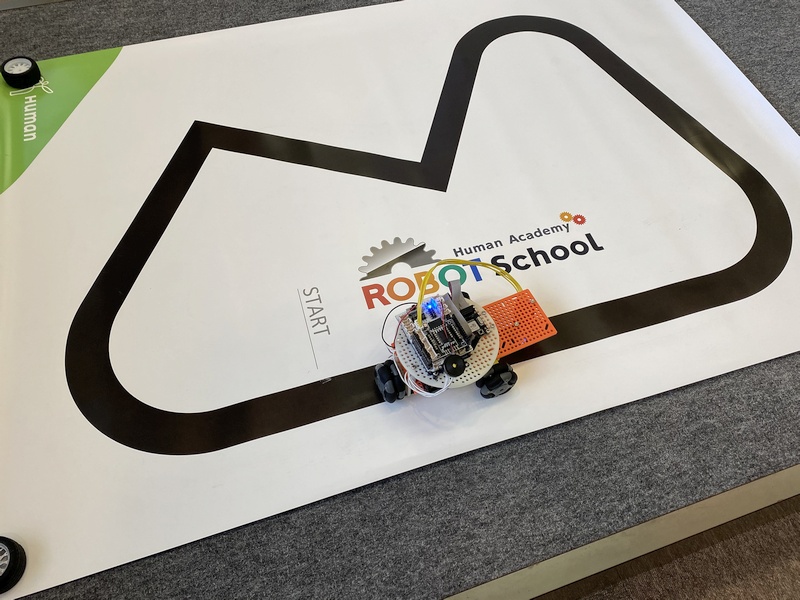
その1つ目は、「ライントレーサー」です。
カラーセンサーを下向きに取り付け、地面の明暗(白黒)情報だけを処理し、黒いライン(の縁)をたどるロボット[Tracer]に仕立てます。
「白なら右へ、黒なら左へ」旋回するように片輪を交互に駆動する制御方式は、アドバンスコースのテクニカルコンテストと同じですね。
マイコンが認識する明度(明るさの数値)は、環境光や反射率はもちろん、センサーの個体差、電源電圧(*2)にも左右されるため、各々のロボットで閾(しきい)値 colorIsBlack(1000) を変更する必要がありました(*3)。
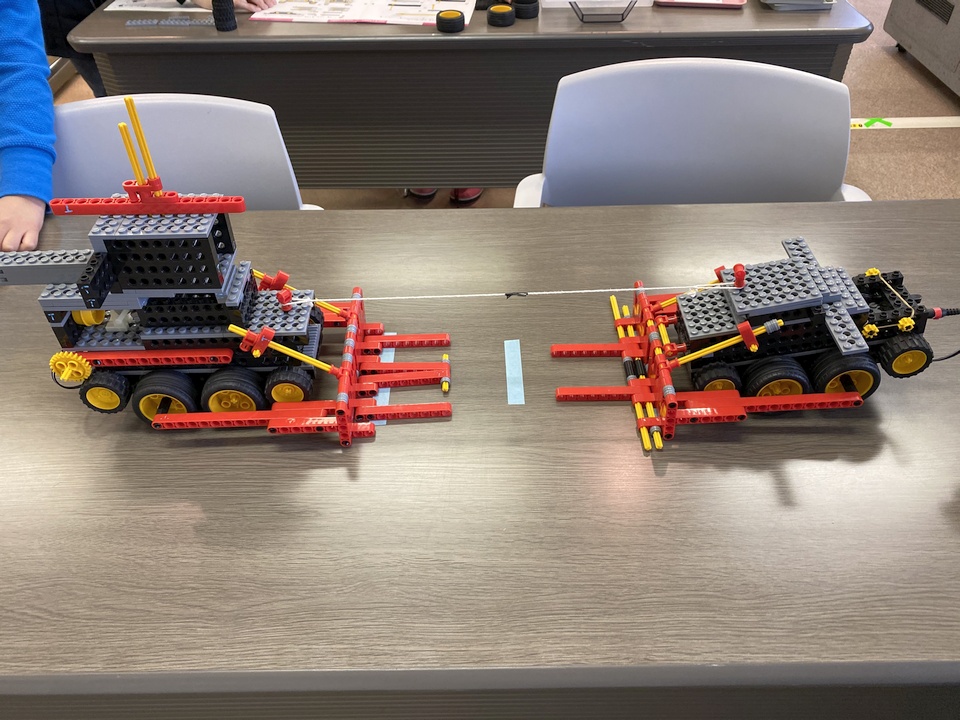
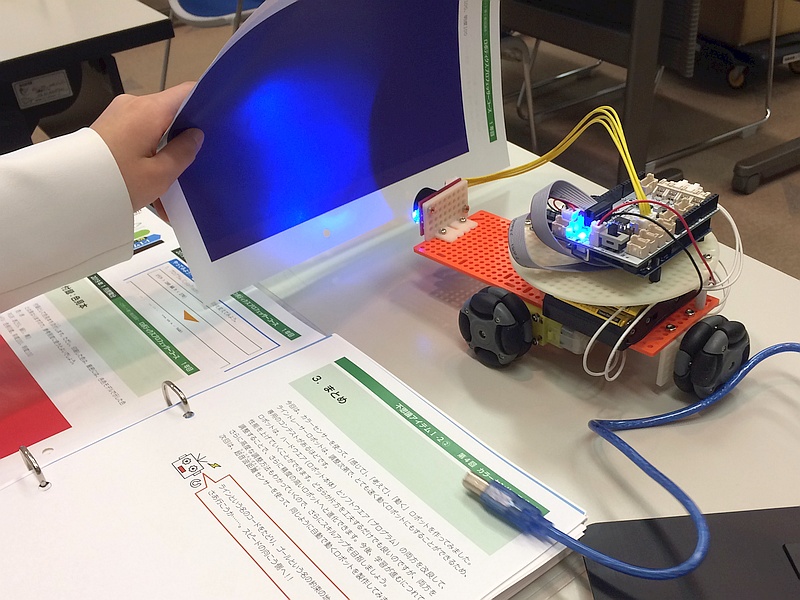 2つ目は、「カラートレーサー」です。
2つ目は、「カラートレーサー」です。カラーセンサーをヘッドライトのように前向きに取り付け、前方景色の色相(色味)情報だけ(*4)を処理し、特定の色に向かうロボット[ColorTracer]に仕立てます。
サンプルプログラム中、色相 h を使って“if(h>180 && h<270) {前進せよ;} else {停止せよ;}”となっています。
これは、数学的には 180°<h<270°のことで、色相環(先月第2回テキストp.12)で確かめると“青”ですね。
“緑”なら“if(h>60 && h<150) …”くらいでしょうか。
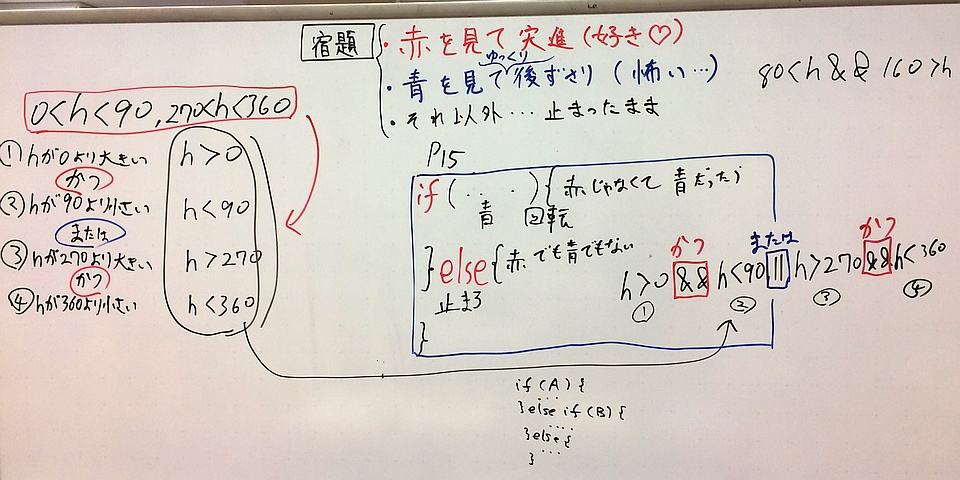
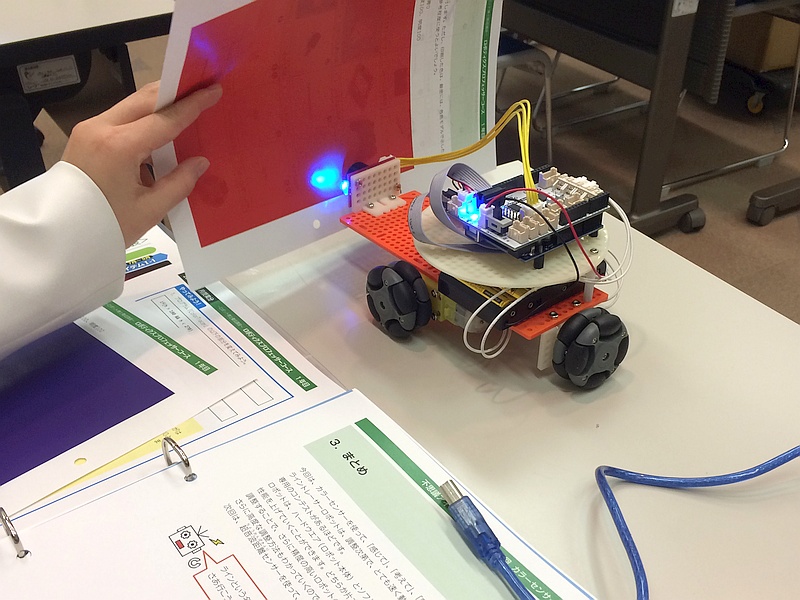 “赤”は難しいです。2つの変域 0°≦h<30°, 300°<h<360°がありますので、“もし(hが0以上 かつ hが30未満)または(hが300超 かつ hが360未満)ならば”のように論理的に記述しなければなりません。
“赤”は難しいです。2つの変域 0°≦h<30°, 300°<h<360°がありますので、“もし(hが0以上 かつ hが30未満)または(hが300超 かつ hが360未満)ならば”のように論理的に記述しなければなりません。“if( (h>0 && h<30) || (h>300 && h<360) ) …”となります(*5)。
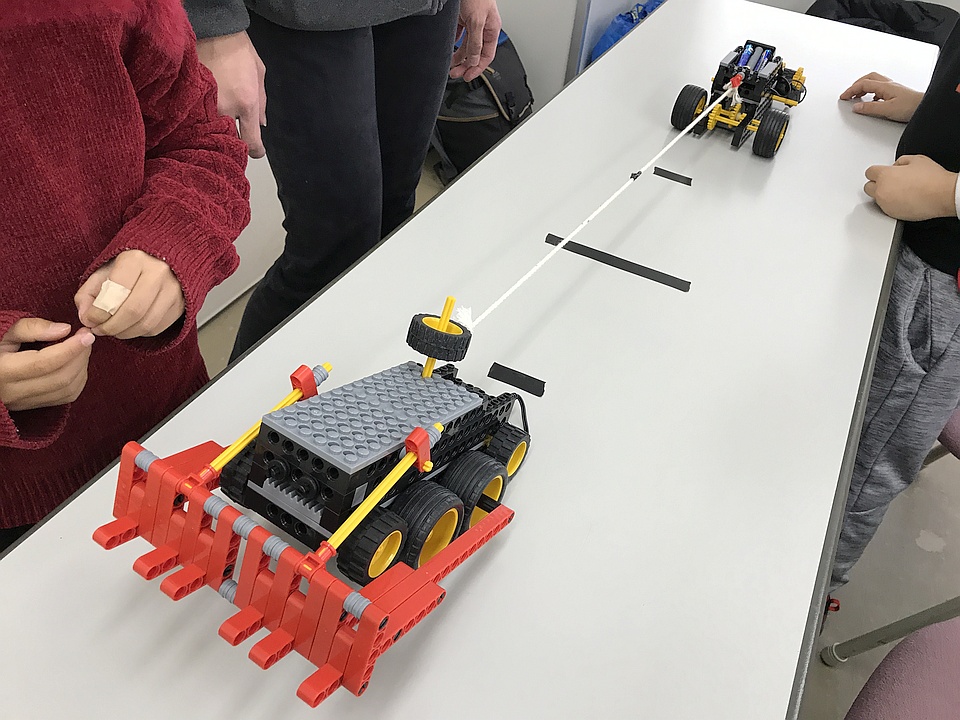
 走り方(タイミング、スピード、軌跡など)に変化をもたせて、好きな色を見ると近づいて行く愛らしいロボット(闘牛?)に仕上げてみましょう。
走り方(タイミング、スピード、軌跡など)に変化をもたせて、好きな色を見ると近づいて行く愛らしいロボット(闘牛?)に仕上げてみましょう。“鳴く”と面白そうですね。
最終月は、「ウルトラソニックロボット」で今タームを仕上げます。
*1 これだけで普通の自動車(1エンジン)を遥かに凌駕する自由度を獲得できるのですから、将来は電気自動車に替わっていくわけです。
*2 パソコンからのUSB給電の場合と、電池駆動とで数値が変わるという…盲点があります。
*3 よりスマートに、調整用プログラム[ColorSensor2]実行中、Arduino“シリアルモニタ”を起動し、USBケーブル経由で白地と黒ライン上の数値をモニタリングし、その中間値を閾値として設定することもできます。
*4 1ドットカメラなので、人間なら瞼(まぶた)を瞑(つむ)ったまま外光の色を感じるようなものです。
*5 論理積(AND)演算子 && は、論理和(OR)演算子 || より優先順位が高い(先に演算される)ので、“if(h>0&&h<30||h>300&&h<360)…”と続けて書いてもOKですし、h=0~359の値しか取らないので、実は“if(h<30 || h>300)…”だけでもOKです。
2. 2月の課題
<スタートアップ(全コース)>
特にありません
<プライマリーコース>
- オリジナル図形プリント
http://robocobo.sakura.ne.jp/blog/HW/RobotP2002-Q.pdf
<ベーシックコース>
- 上記授業内容を精読する(概ね3年生以上/低学年は補助の下で)
- オリジナル課題プリント(3面図+設問)
http://robocobo.sakura.ne.jp/blog/HW/RobotB2002-Q.pdf
<ミドルコース>
- 上記授業内容を精読する
- オリジナル課題プリント(3面図+設問)
http://robocobo.sakura.ne.jp/blog/HW/RobotM2002-Q.pdf
<アドバンスコース>
- 上記授業内容を精読する
<プロ1年目コース>
- 上記授業内容を精読する(該当テキストページを見ながら/記事より授業が遅れているので予習する)
【重要】
課題プリントの印刷/提出ルールについて、お知らせをご覧下さい。
3. 1月の解答
<プライマリーコース>
http://robocobo.sakura.ne.jp/blog/HW/RobotP2001-A.pdf
<ベーシックコース>
http://robocobo.sakura.ne.jp/blog/HW/RobotB2001-A.pdf
<ミドルコース>
http://robocobo.sakura.ne.jp/blog/HW/RobotM2001-A.pdf
<アドバンスコース>
http://robocobo.sakura.ne.jp/blog/HW/RobotA2001-A.pdf
4. 今後の授業スケジュール
◆中間3/14, 28は八幡東『レインボープラザ』で開催します。
◆小倉北3/15→3/22へ一週ずれます。
小倉北3/22は小倉南『総合農事センター』で開催します。
◆小倉南3月は一週ずつ遅れます。
◆5月は一週ずつ遅れます(小倉南5/10を除く)。
――――――――――【佐藤教室長】――――――――――
[東福間]第1・3土原則<学習ルームでこぼこ>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドバンス
⇒ 3/7, 21, 4/4, 18, 5/9, 23
[中間]第2・4土原則<なかまハーモニーホール>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドバンス
⇒3/14※第1回 八幡東レインボープラザ4F絵画室
3/28※第2回 八幡東レインボープラザ4F絵画室
4/11, 25, 5/16, 30
※3/14, 28はハーモニーホール臨時休館の為、代替施設で開催します。
[小倉北]第1・3日原則<ムーブ>
- 10:30~ ベーシック/プライマリ
- 13:00~ ミドル/ロボプロ1年目
- 15:00~ アドバンス
⇒3/ 1 第1回 4F和室・工芸室
3/22※第2回 小倉南 総合農事センター2F A研修室
4/5, 19, 5/10, 24
※教室都合の為、3/15→3/22へ一週ずれます。
また、ムーブ臨時休館の為、代替施設で開催します。
――――――――――【中野教室長】――――――――――
[八幡東]第1・3土原則<レインボープラザ4F>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドバンス
⇒ 3/7, 21, 4/4, 18, 5/9, 23
[小倉南]第2・4日原則<総合農事センター2F>
- 10:30~ ベーシック/プライマリ
- 13:00~ ミドル(/ロボプロ1年目)
- 15:00~ アドバンス
⇒ 3/15※, 29※, 4/12, 26, 5/10, 31(24から変更)
※教室都合の為、3月は一週ずつ遅れます。
5. お知らせ
1) 課題プリントのコンビニ印刷ユーザー番号「DA2XCQKMNP」にて印刷できます。
<ローソン・ファミリーマート手順>
https://networkprint.ne.jp/sharp_netprint/ja/howto_doc_convini.aspx
<要約>
1.「ネットワークプリント」を選択
2. ユーザー番号「DA2XCQKMNP」を入力
3.「文書プリント」を選択
4. 所定コースの課題PDFのみ印刷
(「カラー」「両面印刷/横とじ」を推奨)
2) 課題プリントの印刷/提出ルール[再掲] ※重要ポイント
・当月の課題プリントは2回目の授業日前後(月報より前)にメール配信します
・印刷はモノクロで問題ありませんが、カラーを推奨します
※なるべく両面印刷で、片面2枚の場合は「必ずホチキスで綴じて」下さい
裏面には記名欄がなく、別紙では採点/返却できません
※提出期限は「次月1回目の授業日まで」としますが、
今月の配信が遅くなりましたので「3/22まで」とします
・提出者には従来通り採点して返却します
・点数分のポイント色カードを進呈し、3ヶ月毎の景品交換に使います
※正式な解答は「次月の課題プリント配信で公開」します
・自主性に任せ、強制しません
3) KIGSわくわくワークショップまつり中止
https://www.kigs.jp/event/2020/01/551.php
3/8(日)北九州イノベーションギャラリーにて、PCN(Programming Club Network)北九州として出展を予定しておりました『春のわくわくワークショップまつり2020』は、新型コロナウイルス感染予防の為に中止となりました。
学校や教室からの配布チラシを楽しみにされていた方には気の毒ですが、ご了承下さい。
4) IchigoJam初級プログラミング ~7セグLEDはんだ付けゲーム工作編~ 終了
2/11(火・祝)北九州パレスにて、7組の方に参加頂きました。
AMは、7セグLEDや制御ICをはんだ付け工作し、IchigoJamから光らせました。
PMは、7セグLEDゲーム『7人のガンマン』『時限ボム』をプログラミングし、そのシンプルな面白さと、電子基板むき出しの臨場感で盛り上がりました。
最後の生き残りを懸けて、風船爆弾の起爆を解除すべくワイヤーカットするバトル・ロイヤルもどきにもハラハラしました。

5) 標準キット用バッグ/ケース リニューアル品の斡旋[再掲]
収納性・強度などが改良されました。
http://robocobo.sakura.ne.jp/blog/goods/newBagCase.pdf
特別価格で残り2セット(標準価格で随時)あります。ご希望の方はメールにて承ります。
・標準バッグ 3,500円⇒2,500円(税別)
・標準ケース 1,000円⇒ 700円(税別)
セット購入がお奨めです。お代はお引落しで頂戴します。
6) 1月課題 高得点者 []内は教室と学年
◆プライマリ【15名平均 図形3.0】
5点…柴田[小倉北2], 鑓水[小倉北 年長], 諭[小倉北1], 合原[小倉南1]
◆ベーシック【21名平均 図面3.0+設問2.2=5.2】
10点…藤津[中間3]
9点…安倍[小倉南4]
8点…原[小倉南3]
◆ミドル【18名平均 図面2.7+設問1.8=4.4】
10点…なし
9点…なし
8点…なし
7点…下木[八幡東4], 森崎[八幡東4], 橋本[小倉南2]
◆アドバンス【13名平均 図面6.3+設問4.2=10.4】
17点…山本[中間7]
14点…原[小倉南6]
13点…橋本[小倉南5]
東福間・中間・小倉北教室 佐藤 / 八幡東・小倉南教室 中野