2.今月の課題
3.先月の解答
4.今後の授業スケジュール
5.お知らせ
1. 1月授業内容
1.0 <スタートアップ(全コース)>
割愛します。
1.1 <プライマリーコース『ロボダック』>
割愛します。
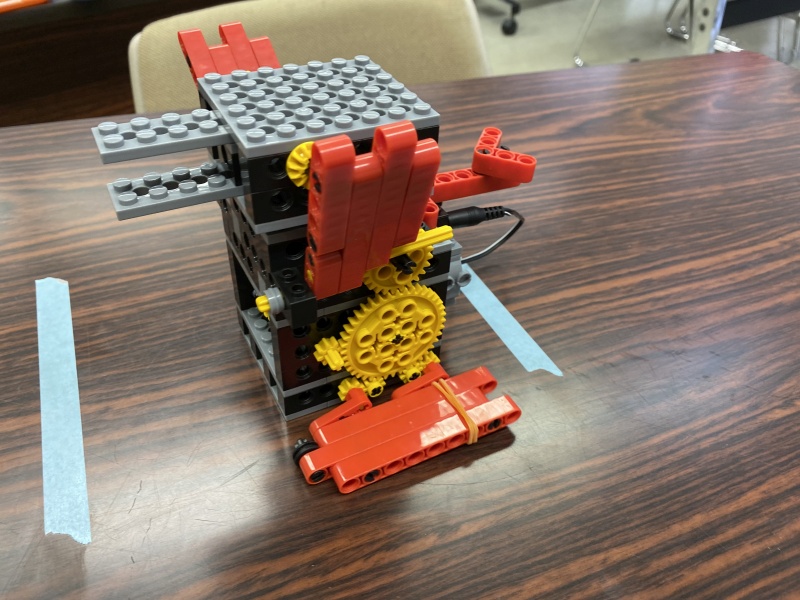


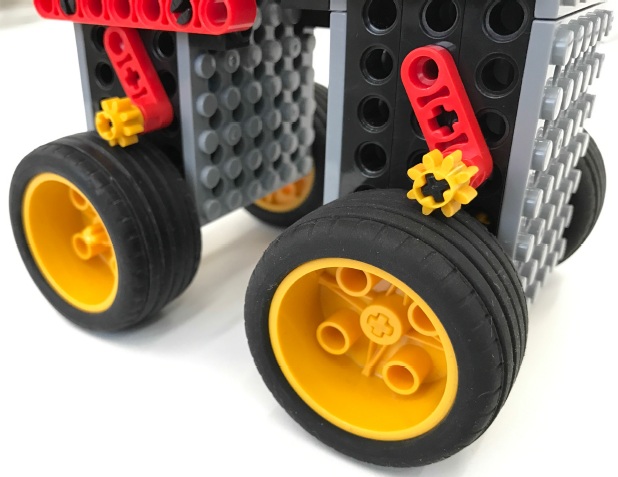
1.2 <ベーシックコース『親子マーチ』>

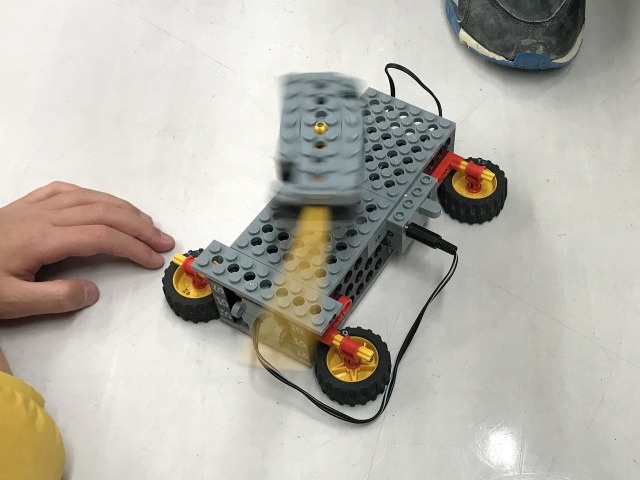
親(前輪)と子(後輪)がタンデムを組んだ4輪車ロボットには違いありませんが、モーターはタイヤを一切(いっさい)回しません。
モーターの仕事は、親のうで(クランク)を回すことで子を引き寄(よ)せたり遠ざけたりするだけです。
 とは言え、親とて足は自由回転するタイヤ。親子とも前後しながら、付かず離れずをくり返すだけで全体としては進まず、下手(へた)な二人三脚のようで滑稽(こっけい)です。
とは言え、親とて足は自由回転するタイヤ。親子とも前後しながら、付かず離れずをくり返すだけで全体としては進まず、下手(へた)な二人三脚のようで滑稽(こっけい)です。1日目はここまで。
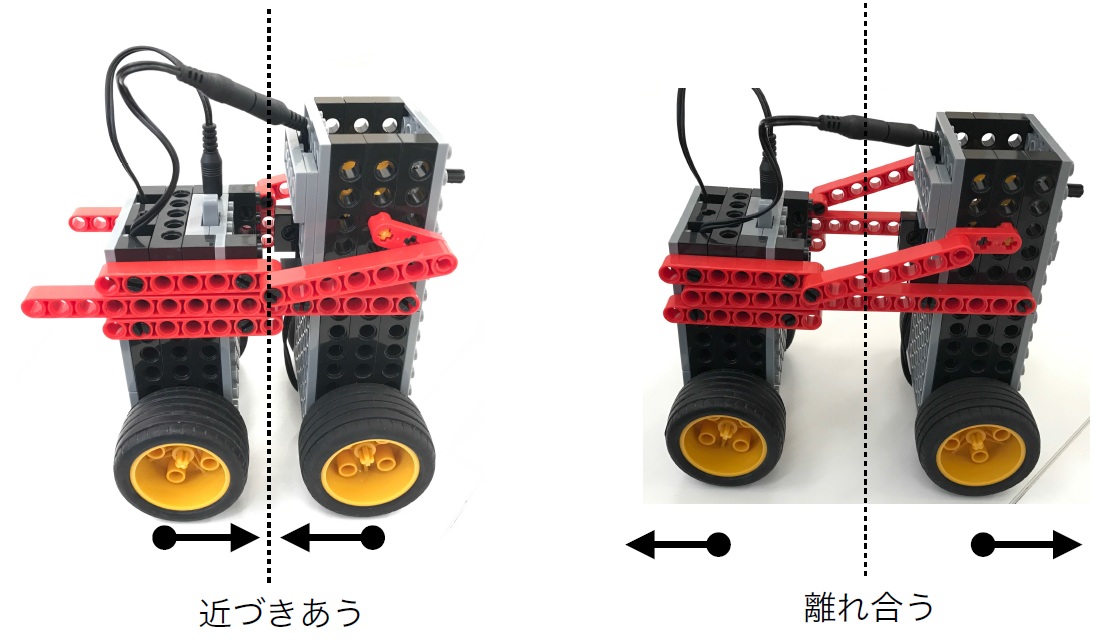 さて、この親子をうまく前進させる仕掛(しか)けが何か必要です。
さて、この親子をうまく前進させる仕掛(しか)けが何か必要です。進まない親子ロボットを観察すると、うでの伸縮(しんしゅく)運動(*1)に合わせて、タイヤが前へ後ろへ交互(こうご)に回っており、移動量は差し引きゼロです。
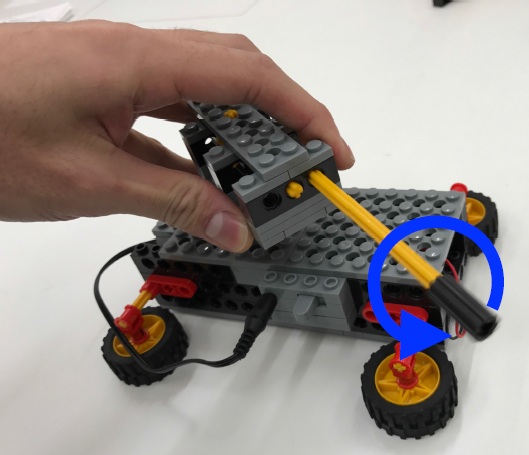
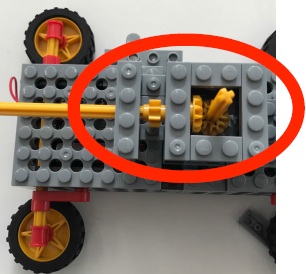
このタイヤを、「前方向へは回るが後ろ方向へは回らない」ようにできれば、もはや進む他(ほか)に道はありませんよね!
知る人ぞ知る、「ラチェット機構(きこう)による回転方向の制限(せいげん)」です。
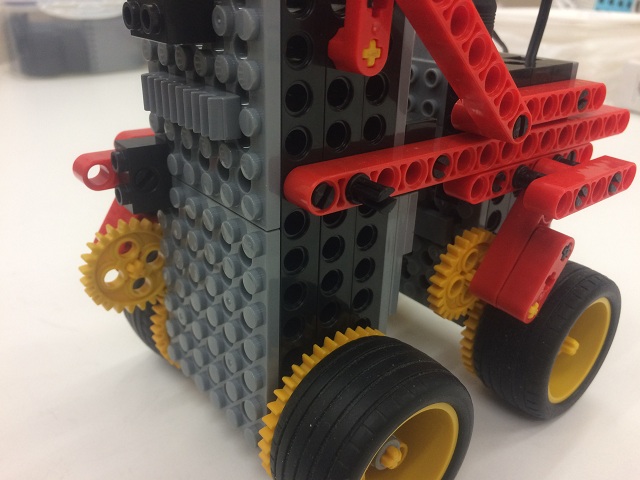
 2日目テキストの通り、タイヤの逆回転を阻止(そし)するストッパーを当てただけで、「前輪を止めて後輪を進め、後輪を止めて前輪を進める」動作をくり返すようになり、今までが嘘(うそ)のようにテンポよく進めるようになりました。
2日目テキストの通り、タイヤの逆回転を阻止(そし)するストッパーを当てただけで、「前輪を止めて後輪を進め、後輪を止めて前輪を進める」動作をくり返すようになり、今までが嘘(うそ)のようにテンポよく進めるようになりました。二人三脚というより、尺取虫(しゃくとりむし)の要領(ようりょう)ですね。
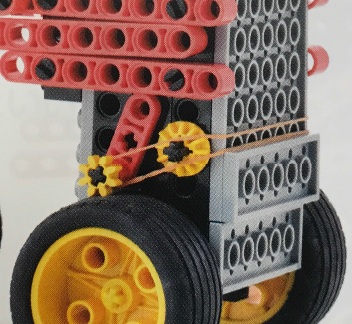 輪ゴムでストッパーの押し付け力を調整します。
輪ゴムでストッパーの押し付け力を調整します。あまりに強く押し当て、前方向にも回りにくくなった失敗例もありましたが、軽く当てるだけで、10°くらいの急な坂道すら、ずり下がらずに上れるようになりました。
 回転を一方向に制限するだけの仕掛けが、こんなにも有用なのですね(*2)。
回転を一方向に制限するだけの仕掛けが、こんなにも有用なのですね(*2)。テキストに頼らず、独自のすばらしい発明の数々も生まれていました。
 授業最後の競技は、上り坂チャレンジ!
授業最後の競技は、上り坂チャレンジ!長机を下記のレベルに傾け、ラチェット(ストッパー)の実装アイデアと性能を競います。
・レベル1 … 約10°;成功率70%の普通レベル
・レベル2 … 約15°;成功率30%のハイレベル
・レベル3 … 約20°;成功率5%の達人レベル
・レベル4 … 約25°;成功率1%の神レベル!
 坂を上るためには、まず、後ろにずり下がらないことが大事です。
坂を上るためには、まず、後ろにずり下がらないことが大事です。ストッパーがちゃんとタイヤに当たるようになっていれば、ほぼレベル1クリアです。
ですが、あまりにストッパーを強くすると、前進の抵抗(ていこう)にもなります。
レベル2のきつい坂をクリアするには、ロボットを軽く手で押しても進むスムーズさが必要になります。
 レベル3にもなると、重心が後ろの子ロボットに寄(よ)り、親ロボットのタイヤに掛(か)かる荷重(かじゅう)が軽くなって滑(すべ)ったり浮(う)いたりし、子ロボットを引き上げられなくなります。
レベル3にもなると、重心が後ろの子ロボットに寄(よ)り、親ロボットのタイヤに掛(か)かる荷重(かじゅう)が軽くなって滑(すべ)ったり浮(う)いたりし、子ロボットを引き上げられなくなります。こうなると、「親ロボットを重くする」のが思い付くアイデアですが、ロボット全体が重くなるのも上り坂には辛(つら)いですよねぇ。
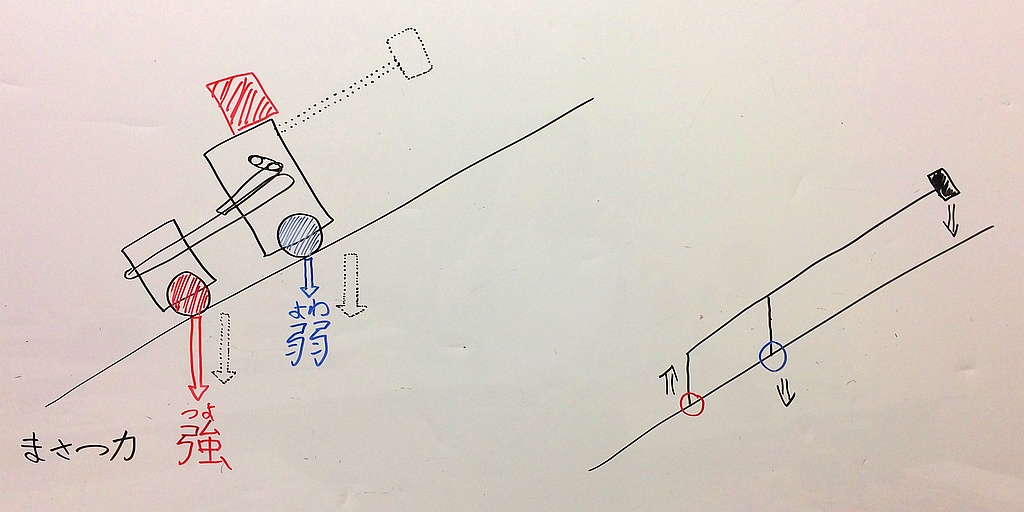 実は、『てこの原理』を応用すれば、「軽いおもりでタイヤに重い荷重を掛ける」なんて魔法も使えるのです。
実は、『てこの原理』を応用すれば、「軽いおもりでタイヤに重い荷重を掛ける」なんて魔法も使えるのです。親ロボットの鼻をピノキオみたいに長く伸ばして、その先に少しおもりを付けましょう。
25°くらいまで上れちゃいますよ。





*1 クランク機構を用いて、モーターからの回転運動を往復(おうふく)運動に変えて実現しています。
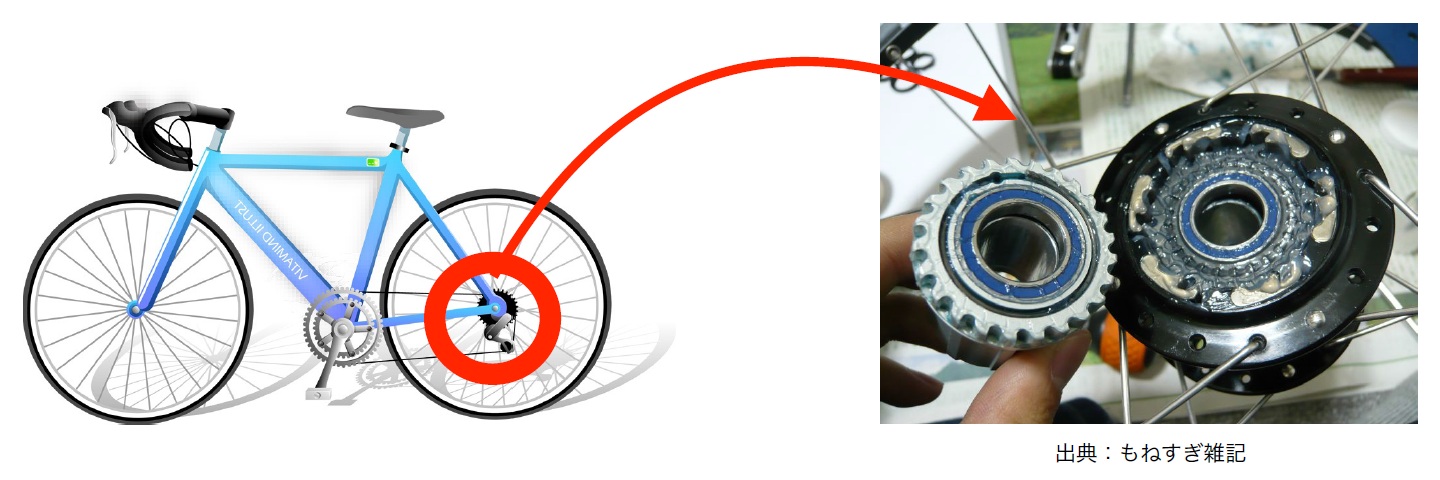 *2 自転車のペダル(正確には後輪のハブ内)にもラチェットが組み込まれています。
*2 自転車のペダル(正確には後輪のハブ内)にもラチェットが組み込まれています。このおかげで、ペダルを休めても車輪は空回り(ペダルの逆回転に相当)することができます。
自転車の画期的な技術革新と言われています。
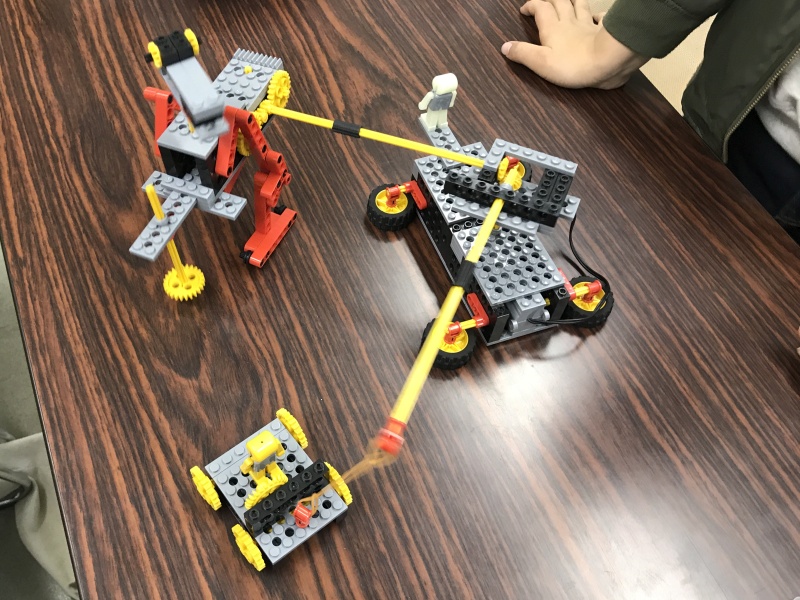
1.3 <ミドルコース『テケテケドリ』>
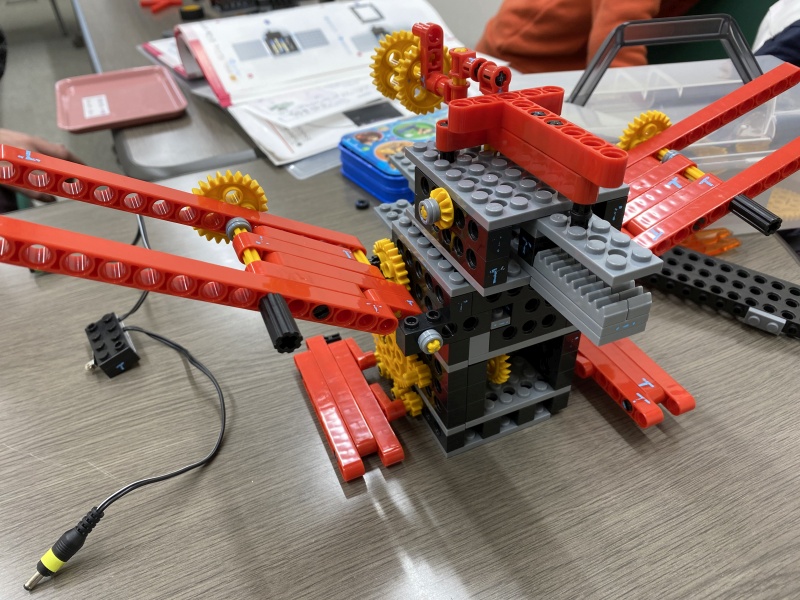
第5回アイデアコンテスト全国大会(2015年)ベーシックコース最優秀賞作品(小3)がベースの、ダチョウロボットです。
 その静的デザインのみならず、足取りや首振りなどの動的アクションに設計センスの高さが光ります。
その静的デザインのみならず、足取りや首振りなどの動的アクションに設計センスの高さが光ります。隙(すき)あらば余剰パーツで武器を製造する過激派の男子には受けないかもしれない、実に可愛らしいだけのロボットに見えますが、高橋智隆先生のお眼鏡に適(かな)い、ミドルコースに登場したのには訳があると考えるべきでしょう。
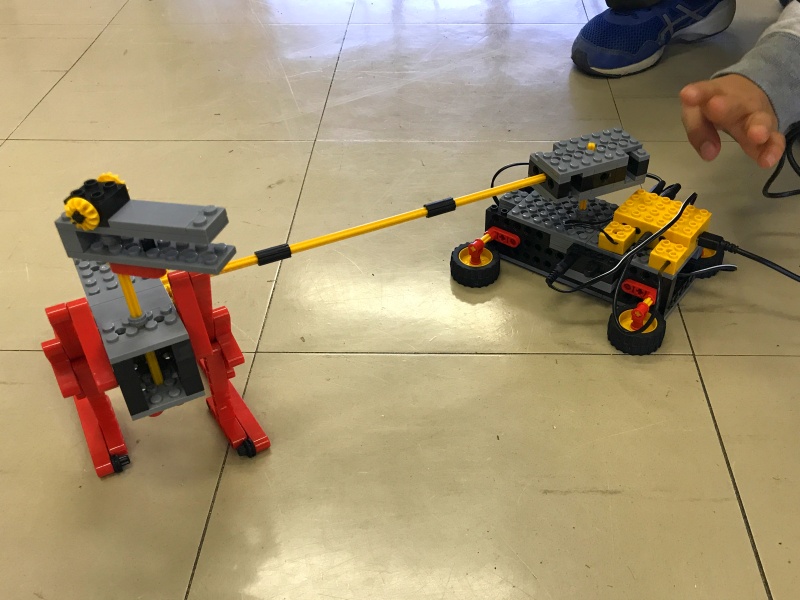
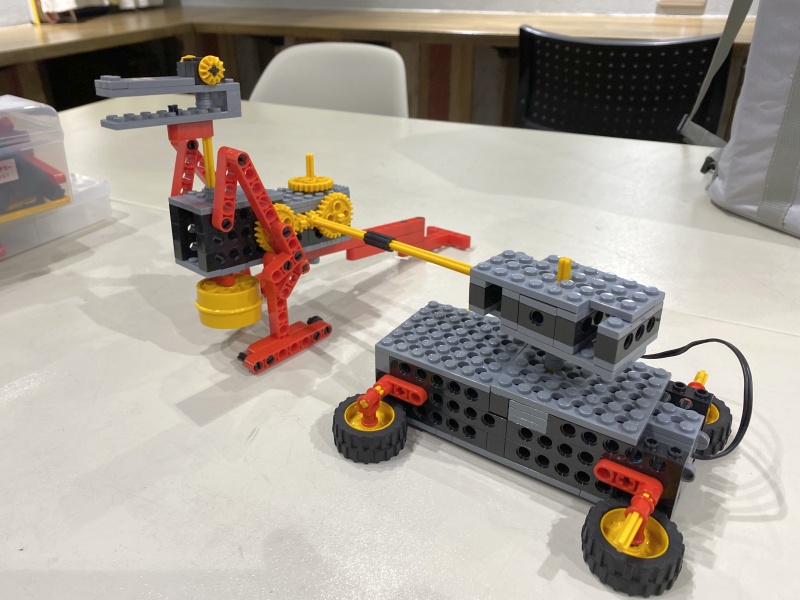
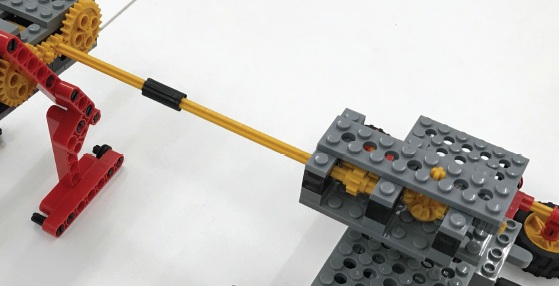 ダイナミックに動くダチョウ本体には、動力源のモーターが内蔵されておらず、回転する“長い”シャフトで動力を伝える点が斬新(ざんしん)です。
ダイナミックに動くダチョウ本体には、動力源のモーターが内蔵されておらず、回転する“長い”シャフトで動力を伝える点が斬新(ざんしん)です。 このような動力伝達装置をドライブシャフト(またはプロペラシャフト)と呼び、世の産業機械ではよく使われています。
このような動力伝達装置をドライブシャフト(またはプロペラシャフト)と呼び、世の産業機械ではよく使われています。道路に目を向ければ、トラックやスポーツカーが、前部のエンジンから遠い後輪を回すのに利用しています(*1)。
二輪車(自転車・バイク)ではチェーンで後輪を駆動するのが普通ですが、ドライブシャフトを利用する例もあります。
ドライブシャフトを採用する最大のメリットは、可動部(車輪・脚)を、大きくて重たい動力源(エンジン・モーター)から切り離し、軽くコンパクトにできることです。
胴体の軽量化が、テケテケドリに軽快なステップを歩ませるのに貢献しています。
 また逆に、テケテケドリの周回コースの中心に置く箱(土台)に、電池ボックスやモーターが内蔵され重くなることで、跳(は)ね回るテケテケドリを駆動しながらも安定して支えることが可能になります(*2)。
また逆に、テケテケドリの周回コースの中心に置く箱(土台)に、電池ボックスやモーターが内蔵され重くなることで、跳(は)ね回るテケテケドリを駆動しながらも安定して支えることが可能になります(*2)。こうして、2足歩行ロボットにとって肝心の、
・足を上げても倒れないこと
・軽く作ること
の双方を実現しながら、さらに動力エネルギーまで伝える“一石三鳥”の働きを1本のシャフトが担(にな)っているのです。すばらしい機能美です。
 とは言え、戦車の砲塔(ほうとう)のように、土台の上でシャフトを振り回す旋回部(回転塔)の高さがテケテケドリと合わず、シャフトが水平でない場合は、躓(つまづ)きがちでしたね。
とは言え、戦車の砲塔(ほうとう)のように、土台の上でシャフトを振り回す旋回部(回転塔)の高さがテケテケドリと合わず、シャフトが水平でない場合は、躓(つまづ)きがちでしたね。左右の脚に掛かる荷重のバランスが崩(くず)れたり、床材によっては、足裏のグロメット(ゴム)との摩擦力が過度に効いたりすることが原因です。
上手に歩む条件を探り出せば、かなり快調(怪鳥?)になります。
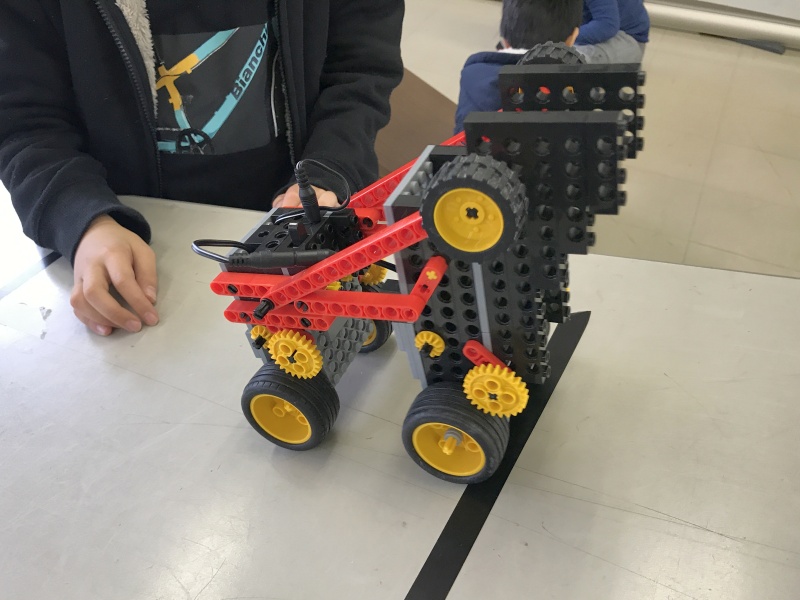
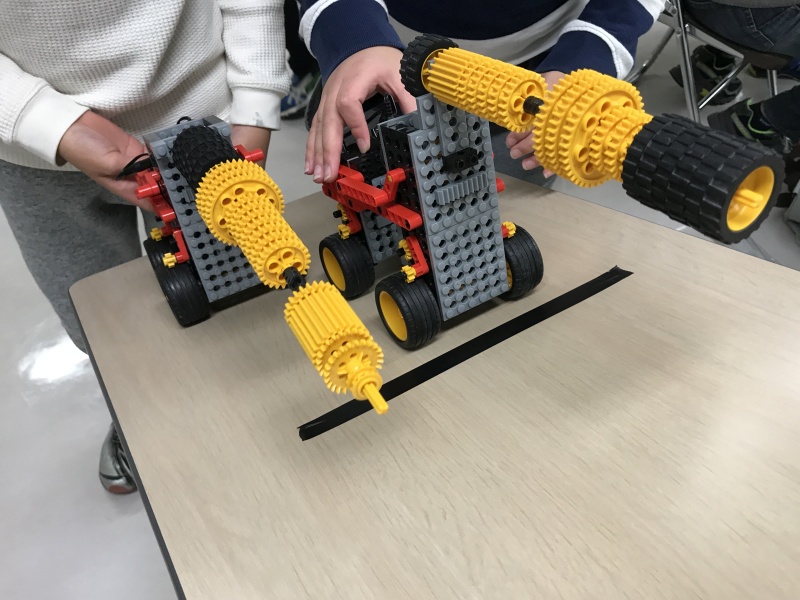
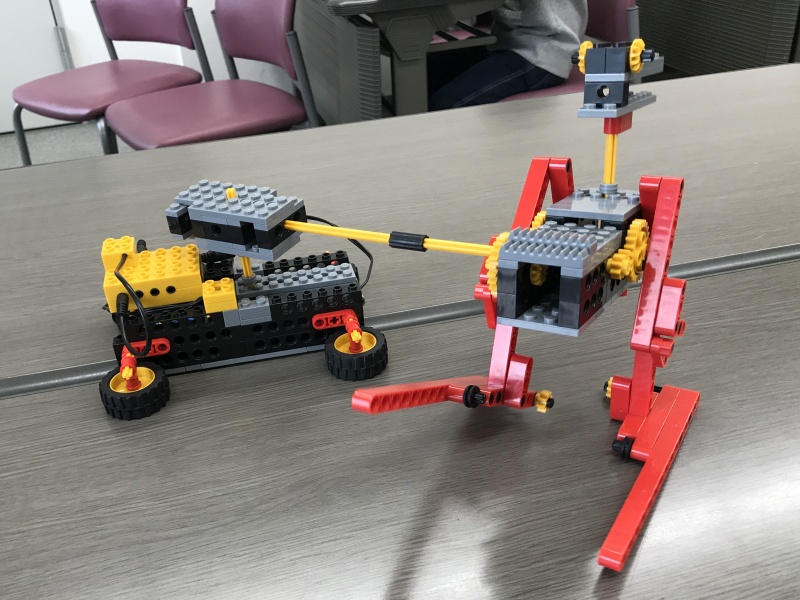
 写真は、何ともメカメカしい、中野先生の渾身(こんしん)の改造作(2017年1月)です。
写真は、何ともメカメカしい、中野先生の渾身(こんしん)の改造作(2017年1月)です。ドライブシャフトを等速ユニバーサルジョイントに変えて、テケテケドリの上下動を吸収し、多少の段差も乗り越えられるようにしました(*3)。
もっとも、ユニバーサルジョイントの自由度の高さが、左右に倒れないよう支える機能を失わせるため、回転塔とトリの背中を平行リンクで結び、上下動しても常に直立させています。
テキストのままでは、ノート1冊分の段差を上ろうにも、すぐに後ろにコケてしまいますが、これは数cmの凹凸も平気です。
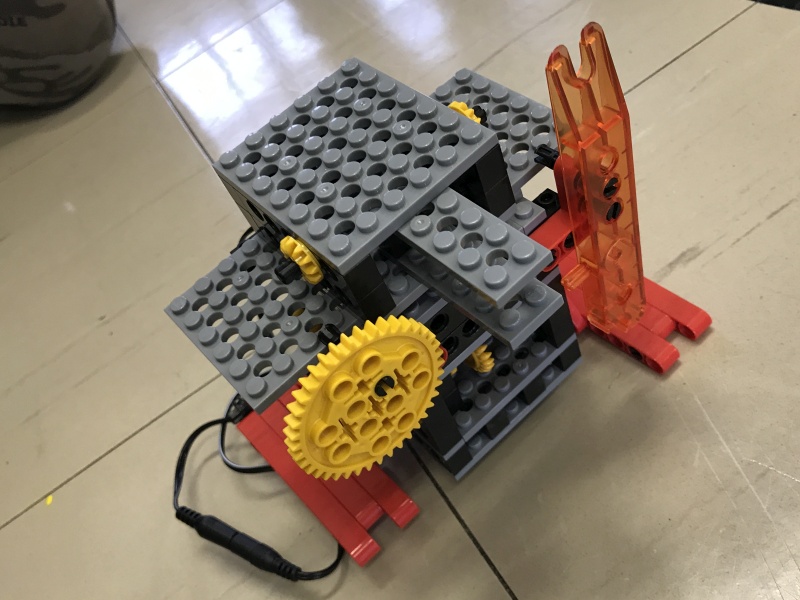
 さて、ダチョウ側に目を惹(ひ)かれがちですが、中央の回転塔にも、普段あまり見かけない面白い機構が備わっています。
さて、ダチョウ側に目を惹(ひ)かれがちですが、中央の回転塔にも、普段あまり見かけない面白い機構が備わっています。ドライブシャフトからダチョウを取り外して、スイッチを右(プラグと反対)側に入れると、回転塔が時計回りに勢いよく回転します。
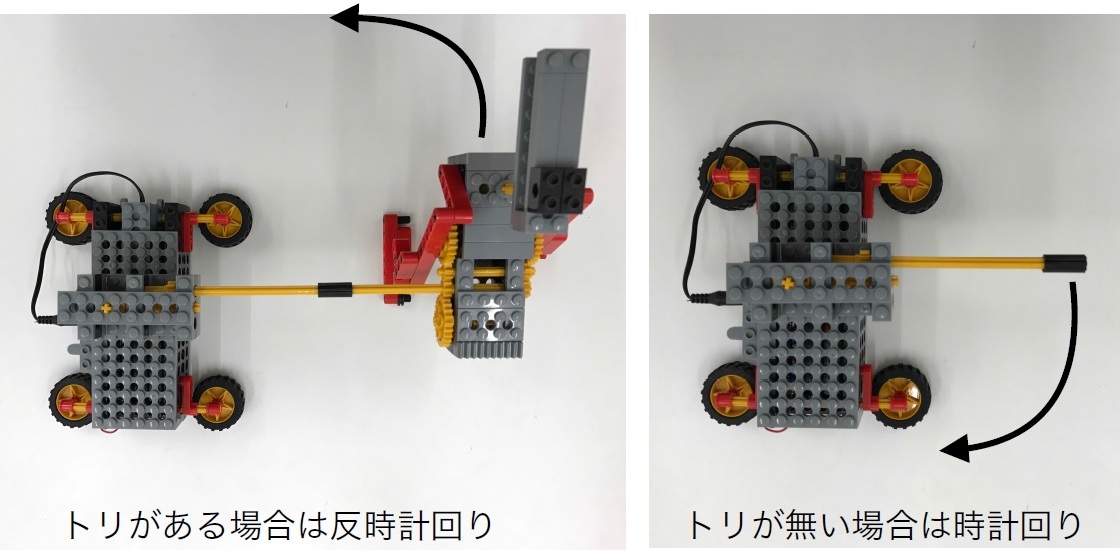 この回転が不思議なのは、ダチョウを取り付けて歩かせている時と比べると、逆回りで、しかもかなり高速なことです。
この回転が不思議なのは、ダチョウを取り付けて歩かせている時と比べると、逆回りで、しかもかなり高速なことです。ここから、回転塔内のギアトレーンが、テケテケドリの歩むスピードや周回方向を決定付けている訳ではないことが分かります。
 さらに、勢いよく回る回転塔を手で止めてみても、さもお構いなしと言わんばかりに、モーターは軽快に回り続けます。変ですね。
さらに、勢いよく回る回転塔を手で止めてみても、さもお構いなしと言わんばかりに、モーターは軽快に回り続けます。変ですね。回転部(ギアやタイヤ)を無理矢理止めてしまえば、モーターも唸(うな)りを上げたまま止まってしまうのが常(つね)のはずです。
但し、このとき、ドライブシャフトは回転しており、これまで止めようとすると、さすがにモーターも苦しそうです。
 実は、これは差動歯車装置の一種であり、モーターの回転は、シャフトの回転でも、回転塔の旋回でも、どちらでも消費できる機構になっており、次の関係が成立しています。
実は、これは差動歯車装置の一種であり、モーターの回転は、シャフトの回転でも、回転塔の旋回でも、どちらでも消費できる機構になっており、次の関係が成立しています。モーター回転数(スイッチ右) = シャフト回転数(ダチョウ前進方向) + 回転塔の時計回り回転数(ダチョウ後退方向)
だから、モーター回転数100%を使って、シャフトだけ回転しても、回転塔だけが旋回しても、50%ずつ分け合うのでも、合計100%になりさえすれば何でも可能なのです(*4)。面白いですね。
テケテケドリを外して、なぜ回転塔の方がほぼ100%で回ろうとするのかは、負荷(摩擦力)の差で決まります。
つまり、ドライブシャフトを回すよりも楽になっているからで、設計や部品が異なれば逆になっても不思議ではありません。



*1 トラックの荷台の下で、走行に合わせてクルクル回る鉄の棒を見たことがあるでしょう。
*2 テケテケドリが片脚を浮かしても立っていられるようになります。
*3 同一直線上に並ばない(回転軸がずれた)ドライブシャフト同士を繋ぐ継手(つぎて)として、ユニバーサルジョイント(自在継手)というジョイント機構が産業利用されていますが、これはミドルコースで別の機会に学びます。
*4 モーター100% = シャフト110% - 回転塔10%(反時計回り)の関係すら可能です。
1.4 <アドバンスコース『アルクンダーZ(2)』>
《下記を参照下さい》
http://robocobo.sakura.ne.jp/blog/robot/adv1-1801.pdf



1.5 <プロ1年目コース『不思議アイテムI-2(1)』>
3ヶ月間の多脚リンクロボットを終え、新しいタームに入りました。
1ヶ月目は、マイコンの入出力として、音と光を操ります。
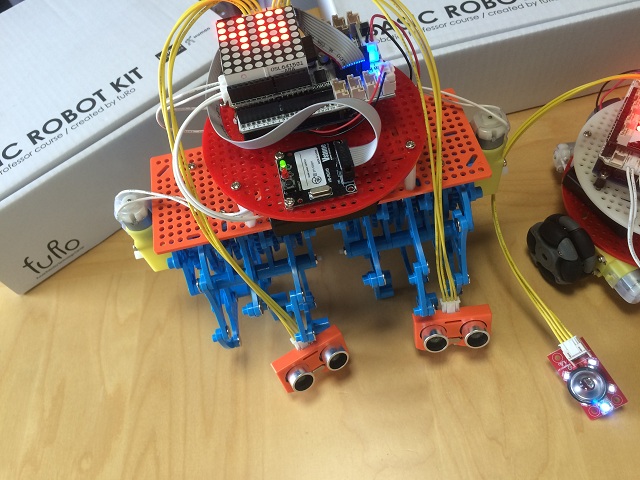 1日目のテーマは、「超音波距離センサーを使う」です。
1日目のテーマは、「超音波距離センサーを使う」です。超音波とは、人間の耳には聞こえない、概ね20kHz以上(*1)の高い周波数の音を指します。
自然界では、イルカ、コウモリ等の生物が利用し、人工物では、犬笛や、魚群探知ソナーが代表的な利用例です。
利用目的としては、コミュニケーションと対象物・距離感知(反響定位/エコーロケーション)に分けられますが、今回のはセンサーですので、後者の方です。
知ってはいても、実際に活用したり、制御したりしたことは無かったでしょう。
 超音波センサーが感知した障害物までの距離をLEDマトリクスに表示するプログラムを試したところ、数cm離した手のひらから90cm超の壁まで、1cm単位で正しく判定することが確認できました。
超音波センサーが感知した障害物までの距離をLEDマトリクスに表示するプログラムを試したところ、数cm離した手のひらから90cm超の壁まで、1cm単位で正しく判定することが確認できました。“泥棒アラーム”など、実用性の高い電子機器がすぐにでも作れますね。
ここで、超音波で距離を計測する仕組みを理解したでしょうか。
目玉のような2個セットの円筒は、同じように見えて(*2)、一方は超音波を出すスピーカで、他方は反射音を拾うマイクです。
340m/秒で音が伝わる空気中において、1/1000秒後に反射音をキャッチしたら、対象物までの距離は 0.34m÷2=17cm ですよ。
1日目の最後は、“テルミンもどき”プログラムで遊びます。
超音波センサーが捉えた距離 dist を用いて、“play(dist*20, …)”と記述すれば、22cmのときにラの音(440Hz)を出し、手を近づければ低く、遠ざければ高い音に変化させることができます。
 テルミンとは馴染みのない楽器だったでしょうが、空中の手の位置で音程を操る点は共通です(*3)。
テルミンとは馴染みのない楽器だったでしょうが、空中の手の位置で音程を操る点は共通です(*3)。超音波センサーは2つ繋いでいますので、1つは音程用で良いとして、もう1つは実物と同じく音の大きさを変えたいところ、その能力は無いので、音の間隔の変更(連続音~断続音)を司らせています。
こうすることで、音の停止(聞こえないほど小さくする代わりに、間隔を無限にあける)を実現しています。
2つのセンサーが担う機能をいろいろ変えて、面白い楽器に仕立てて遊んで欲しいと思います。
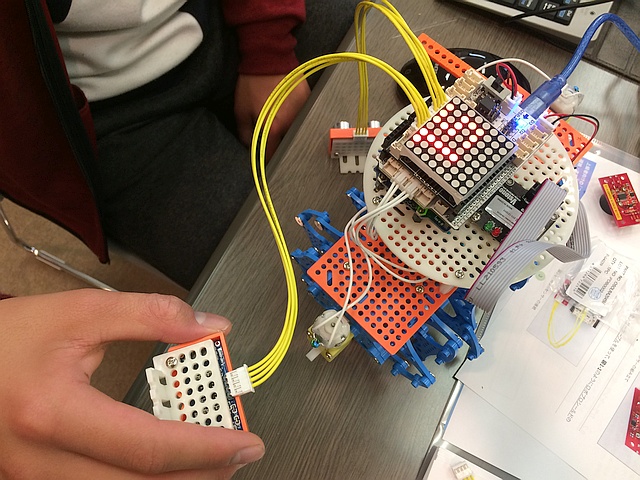
2日目のテーマは、「色で遊ぶ」です。
カラーセンサーボードを接続して、フルカラーLEDを任意の色に光らせたり(出力)、カラーセンサー(1ドットカメラ)で外光を撮影したり(入力)できることを確かめます(*4)。
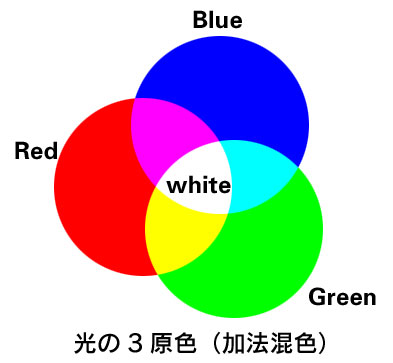 ここで、全ての色は“光の3原色”の混ぜ合わせで作り出せることを実験します。
ここで、全ての色は“光の3原色”の混ぜ合わせで作り出せることを実験します。テレビ等の映像ディスプレイに採用されているRGBカラー方式の元になる原理です。
昔のパソコンが、モノクロ画面に代わり、カラー表示能力をもったばかりの頃は、赤・緑・青の各色を1ビット(0/1)信号だけで制御したため、2×2×2=8色(デジタルRGB)表示から始まりましたが、メモリやCPU性能の向上に伴って、2ビット64色、3ビット512色、4ビット4096色、6ビット26万色と多色(アナログRGB)表示が進み、現在は8ビット1677万色(フルカラー)が標準です。
ここで、各原色(R・G・B)を多ビットで駆動するということは、例えば2ビットなら4階調(0%, 33%, 66%, 100%)の明るさで光らせることであり、その制御方法として、下記の2方式があることを学びます。
A) アナログ方式 - 階調に応じた電圧や電流値に変える
B) デジタル方式 - 高速な0/1信号波形の時間幅の割合を変える
今回のフルカラーLED表示(*5)にも使われている B)方式をパルス幅変調(PWM)方式と呼び、マイコンやプログラムとの親和性が高いので、デジタル制御回路において多用されています。
ところで、色の再現方法には、RGB色モデルの他にも、色味(色相H)・鮮やかさ(彩度S)・明るさ(明度V)を指定して表すHSV色モデルもあり、これらの3次元色空間モデルのいずれでも同一色を表現したり、相互に変換したりできます。
最後に、“光の3原色”について、付け加えておきます。
3原色と言われると、物理学的に赤・緑・青が全ての色の元となる“純色”であって、黄や紫などは“混色”に過ぎないとの錯誤に陥りそうですが、実は、人間の視覚の都合による決め付けに過ぎません。

人間の網膜には、赤・緑・青の光(波長)に“良く”反応する3種の視細胞(赤錐体・緑錐体・青錐体)が高密度に分布しており、この錐体の興奮度合い(電気信号)が視神経を通して脳の視覚野に伝わり、その組み合わせ次第を“勝手に”色として感じているのです。
テレビやカメラがRGB方式を採るのも、この視覚特性に由来しており、人間が「実際の風景を忠実に再現した」と感じる4Kハイビジョン映像も、他の生物や宇宙人の目には、実物とは随分異なる映像色に映るかもしれません。
また、赤と緑の間の単波長光が目に入っても、赤錐体と緑錐体の両方が弱く反応して「黄色」と感じます。
つまり、人間は、黄色に感じる光が赤と緑の混合なのか、単色光(*6)なのかを区別できません。
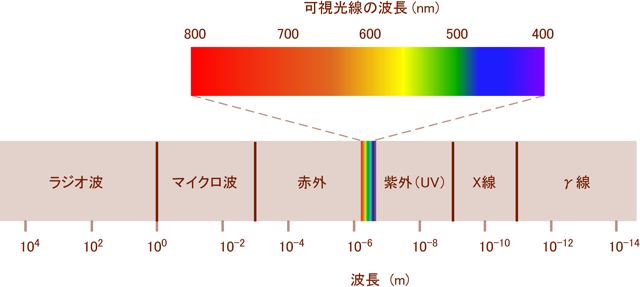 もっと言うと、0.01nm以下から100,000,000,000,000nm(百km)以上の波長まで連続的に存在する電磁波のうち、400~800nmの可視光というごく狭い帯域に人間の視覚が割り当てた“色”という概念は、まやかしに過ぎないのです(*7)。
もっと言うと、0.01nm以下から100,000,000,000,000nm(百km)以上の波長まで連続的に存在する電磁波のうち、400~800nmの可視光というごく狭い帯域に人間の視覚が割り当てた“色”という概念は、まやかしに過ぎないのです(*7)。閑話休題し、2ヶ月目は、カラーセンサーを利用したトレーサー(追跡)ロボットを組み立てます。
*1 何kHzの音まで聞こえるか試せる“耳年齢”アプリというものがありますが、悲しいかな、中年の先生には15kHz辺りが限界です。10代の皆さんには18kHz以上まで聞こえるようですが、先生にとっては既に超音波の域です…。
*2 いや、実は同一部品でしょう。スピーカ(出力)とマイク(入力)は、モーターと発電機の関係に似て、原理的に同じ構造です。
パソコンやオーディオ用のイヤホンも、マイク端子に挿して話しかけると、立派にマイクとして働きます。
*3 実物は、アンテナと手との間の静電容量の変化を、発振周波数(音の高さ)の変調に利用しています。
*4 LED発光および撮影自体はフルカラーRGB色モデルで処理していますが、サンプルプログラム ColorSensor1 や OneDotCamera[Average] 中では、一旦HSV色モデルに変換し、彩度(S)と明度(V)の情報を捨て、色相(H)のみを残して再生するため、視覚とは異なる色に写りますが、色味としては正しいと信じましょう。
*5 サンプルプログラム ColorLED2 で各色を100段階に調整できることからすれば、7ビット(128階調)209万色相当なのでしょうか。
*6 オレンジ1色のナトリウムランプ(単波長590nmの光)が照らすトンネル内の世界では、もはや「色」は存在しないのです…。
*7 この世の物質にも“色”という実体は無く、単に電磁波の波長ごとの反射率や吸収率の違いによる波長分布(スペクトル)の変化と、感覚器官による勝手な解釈があるに過ぎません。
2. 今月の課題
<スタートアップ(全コース)>
特にありません
<プライマリーコース>
- オリジナル図形プリント
http://robocobo.sakura.ne.jp/blog/HW/RobotP2001-Q.pdf
<ベーシックコース>
- 上記授業内容を精読する(概ね3年生以上/低学年は補助の下で)
- オリジナル課題プリント(3面図+設問)
http://robocobo.sakura.ne.jp/blog/HW/RobotB2001-Q.pdf
<ミドルコース>
- 上記授業内容を精読する
- オリジナル課題プリント(3面図+設問)
http://robocobo.sakura.ne.jp/blog/HW/RobotM2001-Q.pdf
<アドバンスコース>
- 上記授業内容を精読する
- オリジナル課題プリント(見取図+設問)
http://robocobo.sakura.ne.jp/blog/HW/RobotA2001-Q.pdf
<プロ1年目コース>
- 上記授業内容を精読する(該当テキストページを見ながら/記事より授業が遅れているので予習する)
- 泥棒アラーム[USSApp1]をベースに、入退室判定(鳴り分け)チャイムに改造する
《ヒント》
US1→US2の順に検知したのか、US2→US1の順に検知したのかを判定する為に、
適当なフラグ変数を宣言 int flag; し、以前に検知した番号を記憶しておく。
検知順に応じてメロディを変える。(メロディ演奏方法は[ToneTest]を参考)
チャイムを鳴らした後はクリア flag=0; しておく。
【重要】
課題プリントの印刷/提出ルールについて、お知らせをご覧下さい。
3. 先月の解答
<プライマリーコース>
http://robocobo.sakura.ne.jp/blog/HW/RobotP1912-A.pdf
<ベーシックコース>
http://robocobo.sakura.ne.jp/blog/HW/RobotB1912-A.pdf
<ミドルコース>
http://robocobo.sakura.ne.jp/blog/HW/RobotM1912-A.pdf
4. 今後の授業スケジュール
◆小倉北3/15→3/22へ一週ずれます。
◆小倉南3月は一週ずつ遅れます。
――――――――――【佐藤教室長】――――――――――
[東福間]第1・3土原則<学習ルームでこぼこ>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドバンス
⇒ 2/1, 15, 3/7, 21, 4/4, 18
[中間]第2・4土原則<なかまハーモニーホール>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドバンス
⇒2/ 8 第1回 3F会議室2
2/22 第2回 3F会議室2
3/14, 28, 4/11, 25
[小倉北]第1・3日原則<ムーブ>
- 10:30~ ベーシック/プライマリ
- 13:00~ ミドル/ロボプロ1年目
- 15:00~ アドバンス
⇒2/ 2 第1回 5F小セミ
2/16 第2回 5F小セミ
3/1, 22※, 4/5, 19
※教室都合の為、3/15→3/22へ一週ずれます。
――――――――――【中野教室長】――――――――――
[八幡東]第1・3土原則<レインボープラザ4F>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドバンス
⇒ 2/1, 15, 3/7, 21, 4/4, 18
[小倉南]第2・4日原則<総合農事センター2F>
- 10:30~ ベーシック/プライマリ
- 13:00~ ミドル(/ロボプロ1年目)
- 15:00~ アドバンス
⇒ 2/9, 23, 3/15※, 29※, 4/12, 26
※教室都合の為、3月は一週ずつ遅れます。
5. お知らせ
1) 課題プリントの印刷/提出ルール ※重要ポイント・当月の課題プリントは2回目の授業日前後(月報より前)にメール配信します
・印刷はモノクロで問題ありませんが、カラーを推奨します
※なるべく両面印刷で、片面2枚の場合は「必ずホチキスで綴じて」下さい
裏面には記名欄がなく、別紙では採点/返却できません
※提出期限は「次月1回目の授業日まで」とします
・提出者には従来通り採点して返却します
・点数分のポイント色カードを進呈し、3ヶ月毎の景品交換に使います
※正式な解答は「次月の課題プリント配信で公開」します
・自主性に任せ、強制しません
2) 2月景品交換会
3ヶ月毎の宿題ポイント交換会を下記授業日に開催します。
ポイントカードを忘れずに、早めに来て下さい。
[東福間]2/1
[小倉北]2/2
[中 間]2/8
[小倉南]2/9
[八幡東]2/15
3) 第4回 IchigoJamプログラミング定期講座
第1回 サウンド 編
第2回 ゲーム工作編
第3回 ハイパーオリンピック編 に続き、
第4回 7セグLEDはんだ付けゲーム工作編 を2/11(火・祝)に開催いたします。
【1/18~26配布チラシ】
http://robocobo.sakura.ne.jp/blog/lab/IJ-B2002.pdf (おもて)
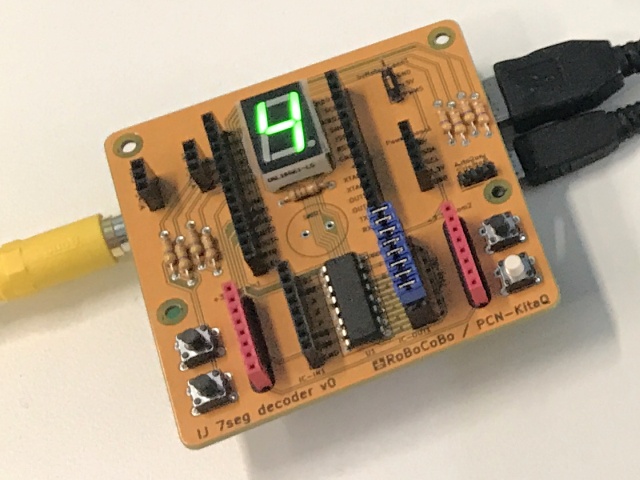 「7セグLED」とは、数字を7本の棒で表わすデジタル表示器のこと。
「7セグLED」とは、数字を7本の棒で表わすデジタル表示器のこと。今回は、7セグLEDを電子基板にはんだ付けしてIchigoJamから光らせ、ゲーム制作に利用してみましょう。
スロットマシン、早押しガンマン、フラッシュ暗算?!などなど…
たった一ケタでもアイデア次第で面白いゲーム機になるよ!
☆スタートアップ(SU)未受講の方は、2/8中間・2/9小倉南教室で承ります。
SU講座7,150円のみでも楽しめますので、プログラミング体験にお奨めします。
(マイコンを持ち帰り、継続できます)
http://robocobo.sakura.ne.jp/blog/lab/IJ-B2002.pdf (うら)
【講座名】
IchigoJam初級ゲームプログラミング ~7セグLEDはんだ付けゲーム工作編~
【内容】
前半は、7セグLEDを電子基板にはんだ付け工作し、IchigoJamに繋ぎます。
後半は、7セグLEDを利用したゲームをプログラミングします。
【講師】PCN北九州 中野・佐藤
【会場】北九州パレス(勤労青少年文化センター) 2F 第2研修室
【時間】2/11(火・祝) 10:00~16:00 (昼休み12:00-13:30)
【対象】下記の小3※~中学生 15名(保護者同伴可)
a) スタートアップ修了者
b) スタートアップ☆受講可能な方(2/8中間・2/9小倉南教室)
※大文字アルファベットA~Zが読める(キーボードを打ちます)
【必須費用】
a)の方 7,150円(受講料6,050+材料費550円+はんだセットレンタル代550円)
b)の方 14,300円(a)+SU受講料3,850+キット代3,300円)
【オプション費用】
A-1) 7インチモニター 4,400円(持込み必須/モデル不問)
A-2) PS/2対応USBキーボード1,650円(持込み必須/モデル不問)
【申込方法】下記を指定の上メールにてお申込み下さい。2/2〆切・先着順です。
<スタートアップ☆種別>
a) 修了済み b) 受講希望(2/8中間・2/9小倉南教室)
<希望オプション>
A-1) 7インチモニター A-2) キーボード D-1) はんだセット持込(-550円)
【申込条件】
- はんだセット持込品(こて・台)に不備がある場合は、レンタル品を使用頂きます。
- IchigoJam本体・周辺機器の持込品が故障した場合は、代用品を購入頂きます。
- 原則として、2月お引落し額(3月分)に加算して徴収させて頂きます。
2/2~キャンセル・欠席により空席が発生した場合は返金できません。
(お申込品とテキストのみお渡しします)
- 保護者の方・お子様ご同伴可(受講生+2名まで)
※本活動はヒューマンアカデミー ロボット教室とは関係ありません
4) 標準キット用バッグ/ケース リニューアル品の斡旋[再掲]
収納性・強度などが改良されました。
http://robocobo.sakura.ne.jp/blog/goods/newBagCase.pdf
特別価格で残り2セット(標準価格で随時)あります。ご希望の方はメールにて承ります。
・標準バッグ 3,500円⇒2,500円(税別)
・標準ケース 1,000円⇒ 700円(税別)
セット購入がお奨めです。お代はお引落しで頂戴します。
5) タブレット修理窓口[再掲]
下記の通り、タブレット修理はご自身で手配して頂くことになります。
http://robocobo.sakura.ne.jp/blog/Information%20on%20tablet%20repair%20service.pdf
- 動作不良時は、先ず教室長までご連絡・お見せ頂く方が宜しいですが、
画面破損等、明らかな故障の場合は早々にご依頼下さい。
- 窓口にはタブレット貸出を希望下さい。
- タブレット貸出が次回授業に間に合わない場合は教室分を用意します。
6) 12月課題 高得点者 []内は教室と学年
◆プライマリ【14名平均 図形2.9】
5点…稲積[八幡東1], 柴田[小倉北2], 土井[小倉南1]
◆ベーシック【21名平均 図面2.3+設問2.3=4.6】
10点…なし
9点…藤津[中間3], 中村[小倉北5]
8点…なし
7点…小牧[小倉南2]
◆ミドル【14名平均 図面2.8+設問2.3=5.1】
10点…なし
9点…林田[小倉南2]
8点…森崎[八幡東4]
7点…なし
東福間・中間・小倉北教室 佐藤 / 八幡東・小倉南教室 中野