2.今月の課題
3.今後の授業スケジュール
4.お知らせ
1. 6月授業内容
1.0 <スタートアップ(全コース)>
割愛します。
1.1 <プライマリーコース『チャリダー』>

割愛します。
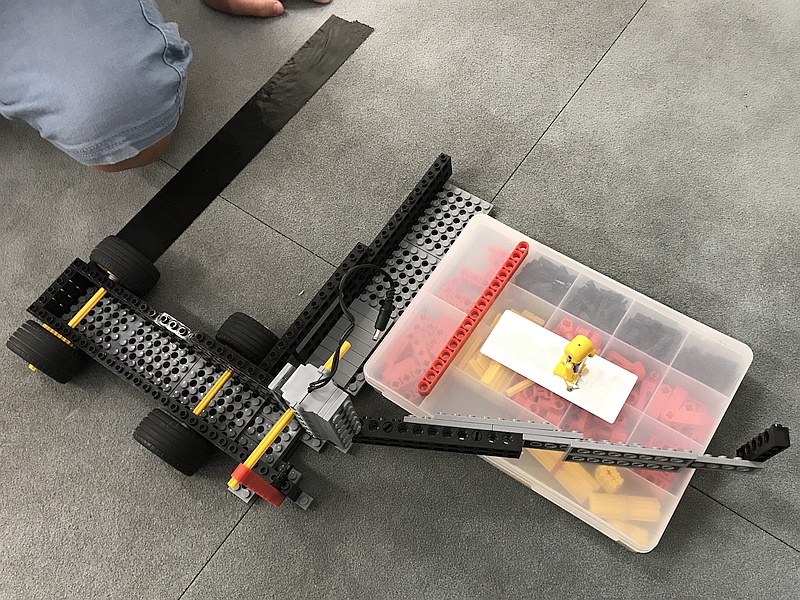
1.2 <ベーシックコース『がたごとレスキュー隊』>
救助ロボットです。
1日目では、何の変哲(へんてつ)もなさそうな4輪車に留(とど)まりましたが、車体底面の地上高(自動車用語でロードクリアランス)が低いため、少しの段差で引っ掛かってしまい、がたごと道はとても無理のようですね。
それでも、ちょっとした工夫があるのです。それはスピードが“遅(おそ)い”ことです。
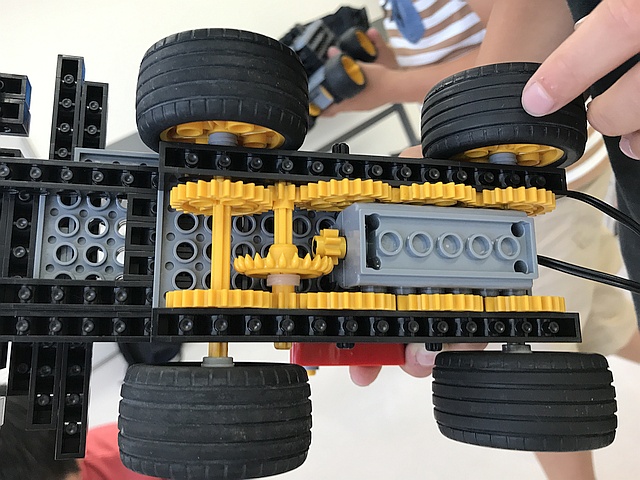
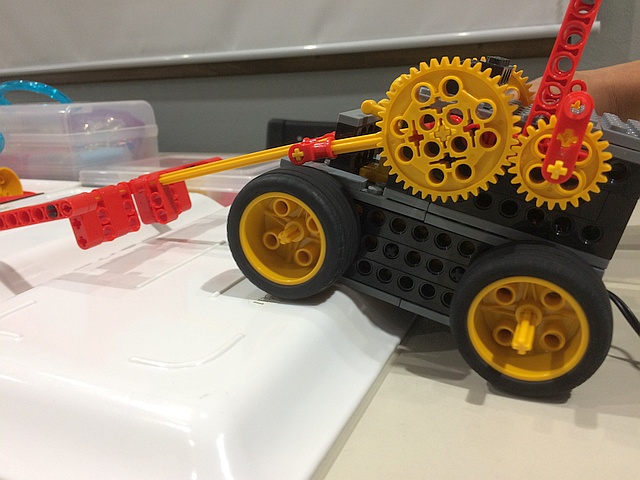
ギアボックスをよく観察してみましょう(*1)。
モーター軸(じく)のピニオンギア(歯数8)が、まずベベルギア(歯数24)を回し、続いてベベルギアと同軸(つまり等速)のピニオンギア(歯数8)が、両隣(りょうどなり)のギアM(歯数24)を回しています。
タイヤはこのギアMと同じスピード(等速)で回転します(*2)。
歯数8のギアが歯数24のギアを回す構成が2段ありますので、1段目で1/3に減速(げんそく)、2段目でさらに1/3に減速することになり、モーターの回転を1/3×1/3=1/9に減速してタイヤを回しています。
つまり、モーターが9回転してタイヤがやっと1回転する遅さです。
遅いだけなら、何のメリットがあるのでしょう?
実は回転する力(トルク)が9倍になるという恩恵(おんけい)があるのです。
試しに、タイヤを外したシャフトを手でギュッと摘(つ)まんでみてください。
大人でも止められない程に強力ですよ。レスキュー隊として頼もしい力強さが準備できました。

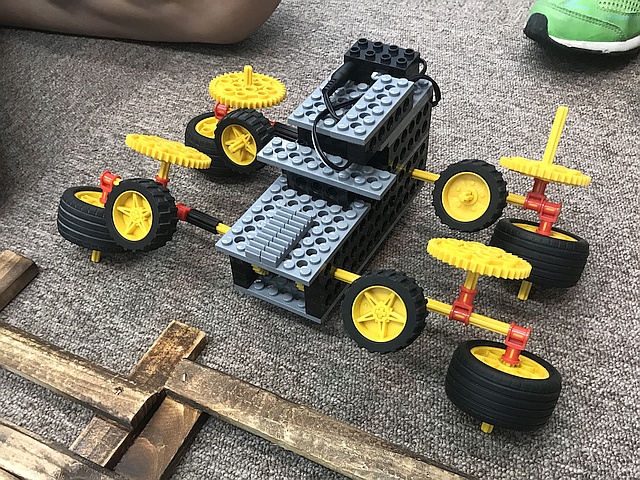
2日目では、ロードクリアランスの問題を解決します。
もっと大径のタイヤを装着できればよいのですが、タイヤLで最大ですので、代案が必要です(*3)。
そうです、タイヤSをクロールする手のように装着するのは、瞬間的に地上高を上げる効果も狙(ねら)っているためです。

バタバタと騒々(そうぞう)しいですが、これで多少の凹凸(おうとつ)は乗り越えられるようになりました。
あとは、4脚(きゃく)の取り付け方向ですね。
4脚ともそろえるのか、左右はそろえて前後でずらすのか、全てを90°ずつずらすのか。
後者ほど、いずれかの脚(あし)が地面を掻(か)いている期間が長く、推進効率に優れそうですが。
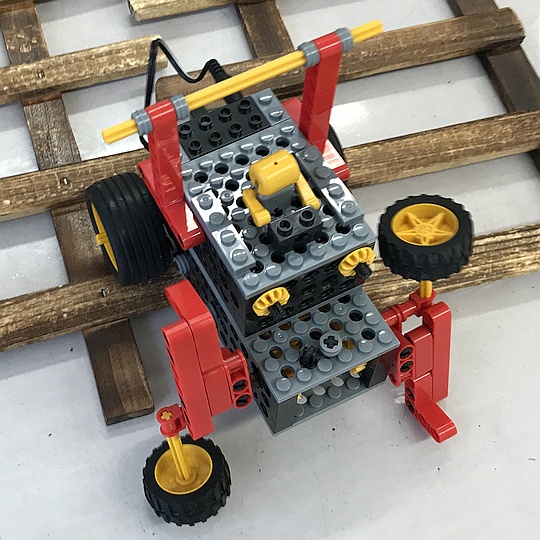
最後の競技は、がたごとレース!
瓦礫(がれき)に見立てた材木等を敷(し)き、成功率20%の難関コースを乗り越えて救助に向かえるかどうかを競います。
瓦礫を前に立ち往生(おうじょう)し、脚がもげるなど、「救助隊が必要な救助隊」が多い中、4脚の向きを全てずらしたロボットの成功が目立ちました(*4)。
4脚ともそろえたロボットでは、どの脚も着地していない間に、せっかく乗り上げた瓦礫を底面で滑(すべ)り下りてしまいました。
左右または前後の2脚ずつそろえたロボットでは、瓦礫に乗り上げて傾いた胴体をさらに傾かせ、転覆(てんぷく)するか、でんぐり返っていました。
ただ、路面の起伏(きふく)や摩擦状況により最適な構成が変わり得ますので、脚をそろえるのが常に不利と思わないようにしてください。
激しい凹凸を乗り越えるだけなら、4脚一斉(いっせい)に胴体を持ち上げた方が有利のはずです。
その後、胴体着地している間に滑り落ちないよう工夫すれば最強かもしれません。
*1 もしくは、テキストp.7~8の写真を見てください。
*2 前タイヤは、一方のギアMと同軸に付けられて等速で回り、後ろタイヤも、もう一方のギアMから始まって、ギアM同士で等速に伝わります。
*3 タイヤLのまま、車高を上げた「ハイリフト車」にするアイデアも出ました。
高い重心のせいで転びやすい問題もありましたが。

*4 胴体と干渉(かんしょう)しないようクリアランスを確保しつつタイヤLに換装(かんそう)するなど、独自の工夫を凝(こ)らして走破(そうは)した人もいました。
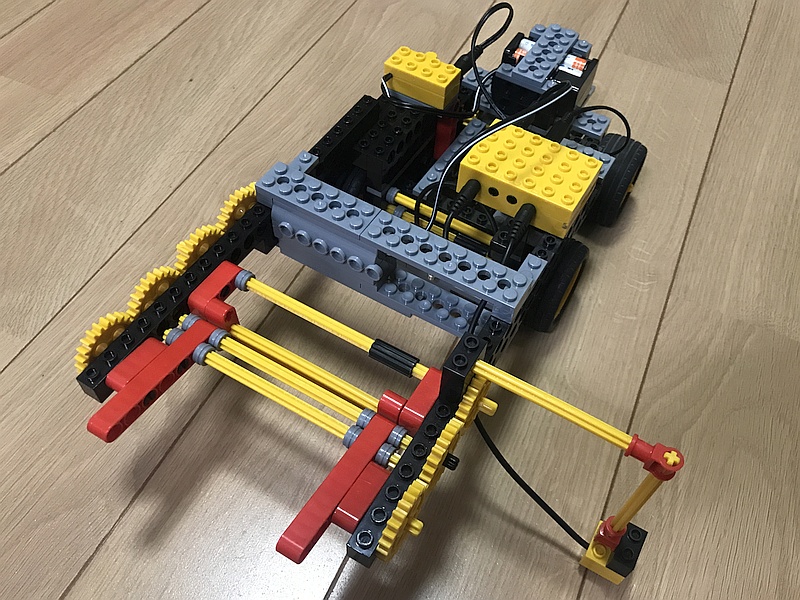
1.3 <ミドルコース『プログラミングカー』>
“プログラミング”と“カー”にそそられます。
“カー”だけに製作も理解も難しくはありませんが、生みの親で、アイデアコンテストで最優秀賞に選ばれた当時小学6年生に脱帽(だつぼう)です。
他のロボットでも、本体の製作時に動作をプログラミングする要素はありますが、本体(ハードウェア)とプログラム(ソフトウェア)媒体(ばいたい)を明確に分離した点で、唯一無二(ゆいいつむに)のロボットです。
プログラムとは何でしょう。一連の動作や演目などの手順(表)ですね。
本体の設計を変更することなく、プログラムだけで動作を決定できる利点があります。
ゲームソフトやアプリのアップデート等が最たる活用例ですね。
コンピュータ類に限らず、テレビ、エアコン、冷蔵庫、洗濯機、炊飯器まで、現代の殆(ほとん)どの電気製品がプログラムに則(のっと)り動作しています。
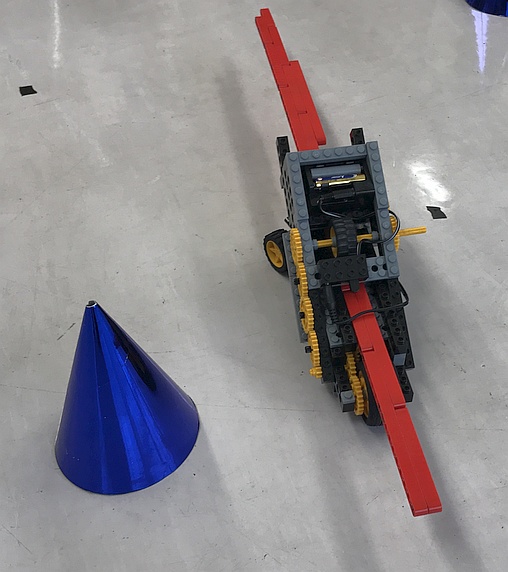
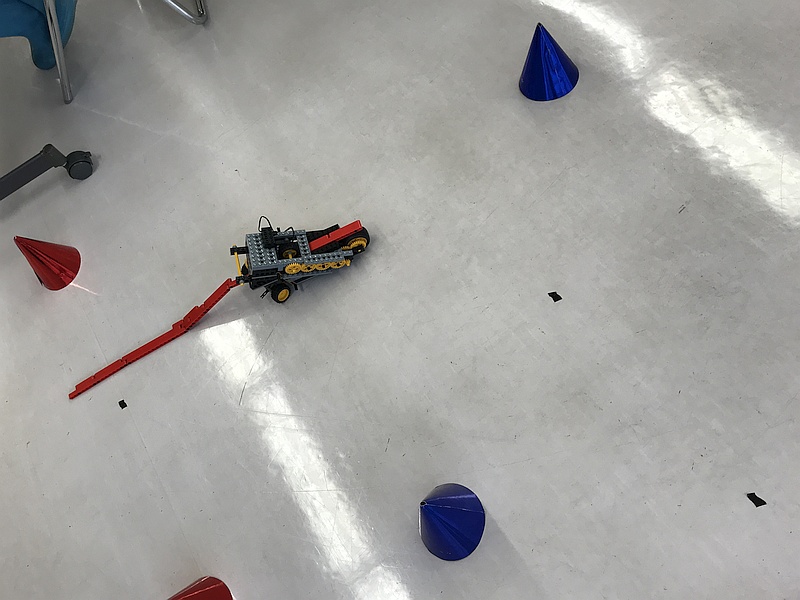
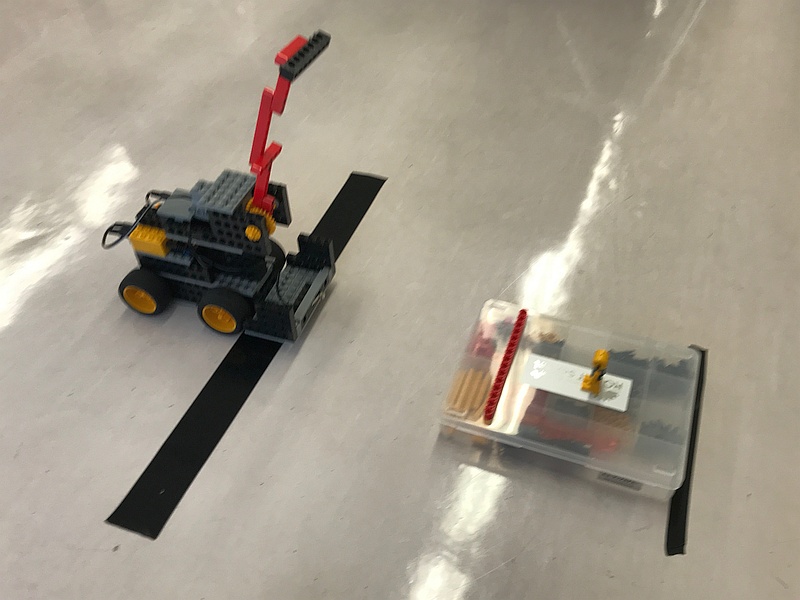
本ロボットのプログラム媒体は、赤いロッドをつなぎ合わせた一本の棒で、その幅(1~3本分)により、右折・直進・左折を指令します。
また、ロッドを円形に組めば無限ループを実現でき、永遠とジグザグ走行や8の字走行を繰り返すこともできます。
走行用モーター動力をプログラムロッドの送り用ローラーにも分配しているところがナイスです。
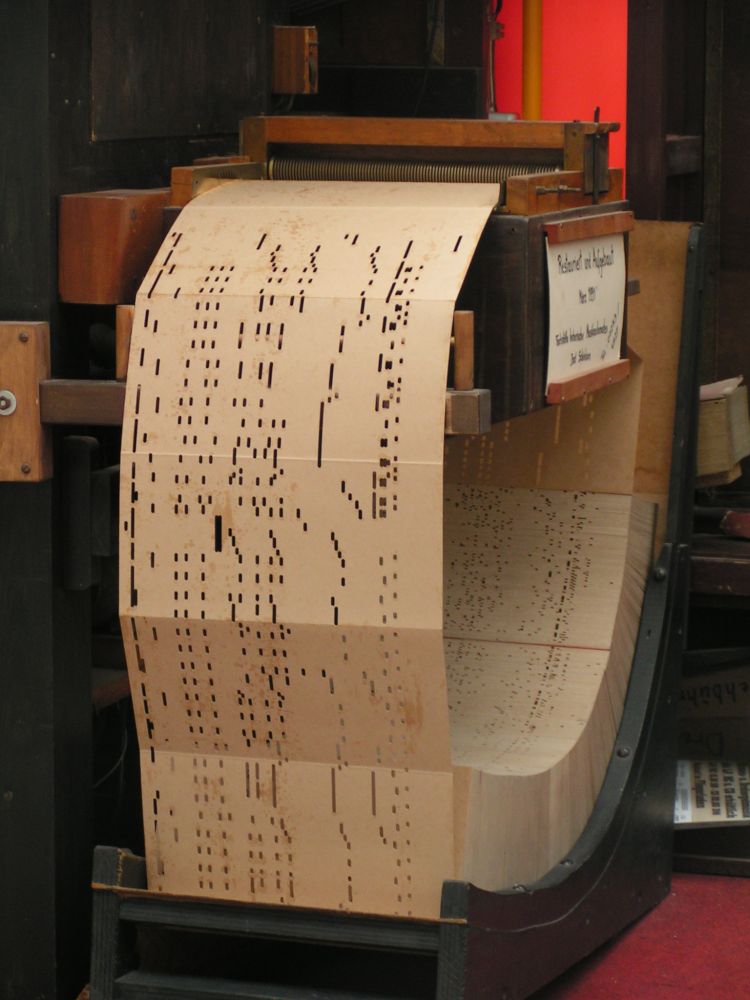
自動織機や自動演奏オルガンから始まって、黎明期(れいめいき)のコンピュータも、パンチカードと言って、無数のパンチ穴を開けた何十メートルもの紙を送ってプログラムやデータをセーブ・ロードしていましたが(*1)、その様を彷彿(ほうふつ)とさせます。
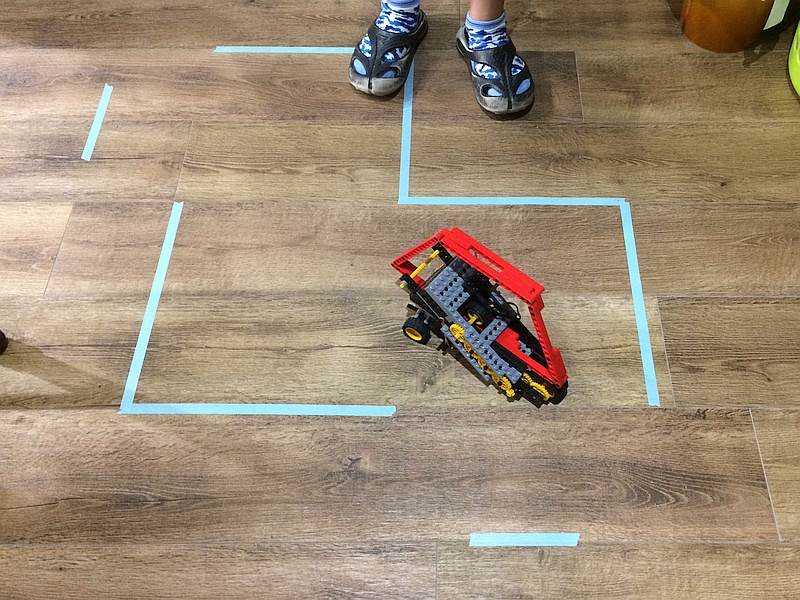
2日目最後の競技に、三角コーンやテープで指示されたジグザグコースを無事に完走するプログラムを設計してもらいました。
このとき、試行錯誤を重ねながら仕上げるのも現実的な成功方法なのですが、計算によって一発成功を狙う科学的方法も追求して欲しいと思い、授業中に余力のある人に挑戦状を掲(かか)げました。
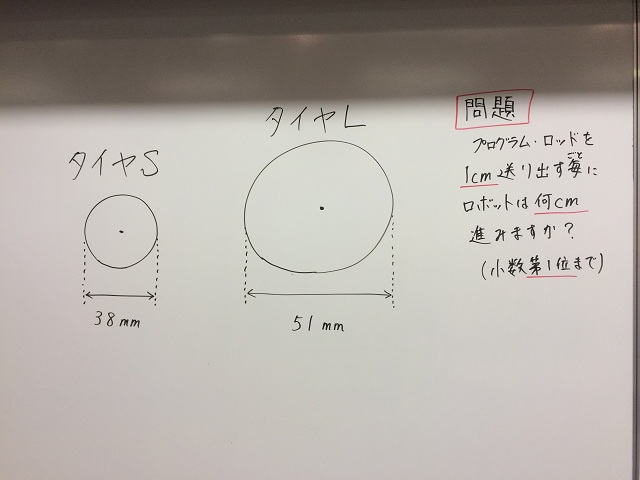
【お題】
ロッド1穴分(約1cm)送る毎にロボットが何cm進むか?(小数第1位まで)
ただし、ロッドを送るタイヤS直径を38mm、本体を推進させるタイヤL直径を51mmとする。
【解答】
タイヤSとLの1回転あたりの移動距離(変位)の比は、円周長の比であり、これは直径の比に等しく、38:51である。
ここで、ギア構成により、タイヤLの回転数はタイヤSの3倍である。
よって、タイヤLによる変位は、タイヤSに比して 3×51/38≒4.026倍となるので、
本ロボットは、ロッド1穴分(約1cm)あたり約4.0cm進む。

実際は、各所のスリップの影響により誤差が出ますが、例えば、55cmのロッドでは220cmのコース取りをプログラミングできるという“アタリ”が付けられるようになり、最初から成功に近づける可能性が高まるのです。
算数/数学が得意な人は、円周率3.14やπ(パイ)を持ち出して面倒な計算をしても同じ答が出ることを確認し、比を用いた考え方を深めてください。
*1 テキストp.22参照
1.4 <アドバンスプログラミングコース『ロボビート(1)』割愛>
《このドラマーロボットも面白いのですが、割愛し、
多くの生徒さんが研究中のテクニカルレース用ロボットに触れます》
去年までのテクニカルコンテストは、ライントレーサーによるタイム競技でしたが、今年から新しいルールとなりました。
今年は、キットケースの上に置いたパイロット(人形パーツ)を自作ロボットで救出(回収)してゴールを目指し、そのミッションを完了するまでの時間を競います。
去年のライントレーサー大会では、早くゴールすることに力を注ぎました。
その結果、ロボットがコースアウトするなど成功率を低くしてしまい、全国大会でも結果を残せませんでした。
その反省を活かし、タイムと回収成功率のバランスに優れた方式を考案して欲しいと願います。
いろいろな方式が考えられます。結果を残すには、次の項目を考慮してください。
●なるべく構造をシンプルにし、重くなりすぎない(軽くなくてもよい)
●ロボットの各パーツが動作中に外れないよう堅牢(けんろう)に
●パイロット回収の成功率を高く(3回に1回以上)
●まっすぐ走り、コースアウトしないように
(重心を極端に偏らせない/2輪以上に駆動力を与える/急加速しない)
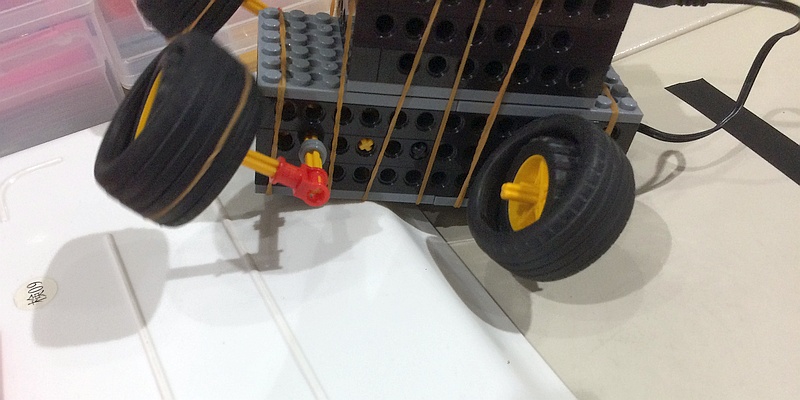
現在ミッション達成してゴールできている4タイプのロボットを紹介します。
型式名:象の鼻
成功率:★★☆☆☆
速 度:★★★☆☆
https://youtu.be/nKLRmut0nGE
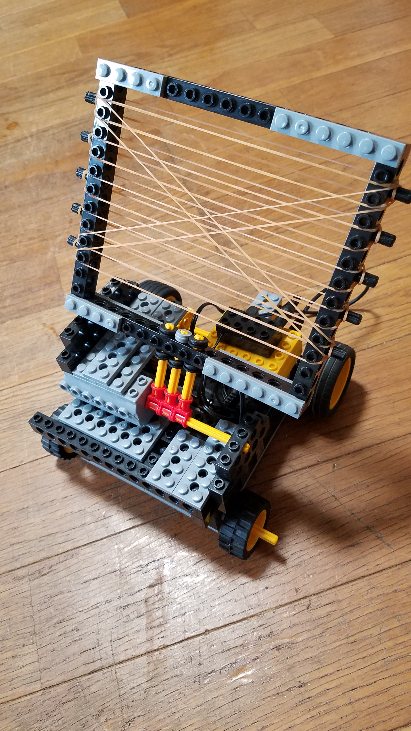
型式名:ゴム網『飛鳥文化アタック』
成功率:★★☆☆☆
速 度:★★★★☆
型式名:回転カゴ
成功率:★★★★☆
速 度:★★★☆☆
https://youtu.be/_fSI5aMJVOw
型式名:ワイパー方式
成功率:★★★★☆
速 度:★★☆☆☆
タイムを狙うことも重要ですが、課題をクリアしないと記録として残りません。
安全策をとるか、トータルバランスか はたまた最速タイムを狙うか、
戦略とライバルを決めて、結果を恐れずに挑んでみましょう。
1.5 <プロ1年目コース『オムニホイールロボット(3)』>
オムニホイールロボットの3ヶ月目、最終月です。
知的ロボットに必要な「感じて」「考えて」「動く」機能のうち、先月までは「考えて」「動く」だけでした。
いや、「考える」といっても、定めたプログラム通りに動くだけで、せいぜい次の動作に移行する秒数を計っているだけでした。
想像してみてください。いくら“脳ミソ”があっても、外界との接点が無ければ(目も耳も鼻も触覚さえも!)、意識は闇の中…。息が詰まりそうですね。
1日目では、「感じる」触覚を与えます。
丸い本体の前部(頭部?)に左右のタッチセンサーを取り付け、そこから針金(触角?)を2本伸ばします。まるでテントウムシですね。
針金に何かが触れると、タッチセンサーがONになって…、どうなる?
それはプログラム次第ですね。そこがマイコン制御方式の良いところです。
右の触角に触れるとちょっと後ずさり、左の触角に触れると旋回するなど、自由に設計できます。
これだけでも、ロボット掃除機を想わせる動きになります。
どうです?あのスゴイ家電の動作も、こんな感じで実現できてしまうのですよ!
自ら判断して動いてくれるので、生物のような賢さや可愛らしさが出てきます。
これを実現するプログラミング要素を学びました。
“もし、○○だったら△△して、そうでなければ××する”ような判断と行動のルールを与えるもので、“if ○○ { △△ } else { ×× }”の形式で記述します。
条件分岐といって、プログラムには大切な要素です。
これがなければ、ゲームソフトも紙芝居がせいぜいです。



最終日の2日目は、ラジコン操縦プログラムを転送して、「考える」賢さをコントローラ操縦者に委ね、パイロン走行やサッカー対戦などで走らせ回りました。
この過程で、プログラムの条件分岐を使用して、高速走行モードに入るボタンが決められていることを悪用(?)して、パラメータを改造することもできました(*1)。
以上、3ヶ月にわたり、オムニホイールの走行原理やプログラミングの基礎を学びました。
特に、同じボタンやタッチセンサーでも、押されてどう反応するかはプログラム次第であるという点が、マイコン非接続型のスイッチ(受動素子)では出せない特徴です。
次回以降のテーマでも、マイコンに様々な判断と命令を担わせて、面白いマシンを製作して参りましょう。
*1 実際の自動車でも、ECU(Engine Control Unit)チューンと言って、そういうことが(やろうと思えば)できます。
エンジン/モーターの最大パワーは変わらないものの、アクセル操作に対する応答特性を変える走行モード切替が付いている車もあります。
2. 今月の課題
<スタートアップ(全コース)>
特にありません
<プライマリーコース>
- オリジナル図形プリント
<ベーシックコース>
- オリジナル課題プリント(3面図+設問)
- 上記授業内容を精読する(概ね3年生以上/低学年は補助の下で)
<ミドルコース>
- オリジナル課題プリント(3面図+設問)
- 上記授業内容を精読する
<アドバンスプログラミングコース>
特にありません(テクニカルレース頑張るぞー!)
<プロ1年目コース>
- 上記授業内容を精読する(該当テキストページを見ながら)
3. 今後の授業スケジュール
◆小倉北7月は『北九州パレス(勤労青少年文化センター)』で開催します。
◆小倉北8月よりベーシック/プライマリ10:30~とさせて頂きます。
◆小倉南8月よりアドバンス15:00~とさせて頂きます(~12月移行期間)。
◆全国大会の為、中間8/24→8/31へシフトします。
――――――――――【佐藤教室長】――――――――――
[東福間]第1・3土原則<学習ルームでこぼこ>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドプロ
⇒ 7/6, 20, 8/3, 17, 9/7, 21
[中間]第2・4土原則<なかまハーモニーホール>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドプロ
⇒7/13 第1回 2F会議室1
7/27 第2回 3F会議室2
8/10, 31※, 9/14, 28
※全国大会の為、8/24→8/31へシフトします。
[小倉北]第1・3日原則
- 10:00~ ベーシック/プライマリ(8月より10:30~)
- 13:00~ ミドル/ロボプロ1年目[暫定]
- 15:00~ アドプロ
⇒7/ 7※第1回 北九州パレス2F 第1研修室
7/21※第2回 北九州パレス2F 第2研修室
8/4, 18, 9/1, 15
※7月は『北九州パレス(勤労青少年文化センター)』で開催します。
――――――――――【中野教室長】――――――――――
[八幡東]第1・3土原則<レインボープラザ4F>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドプロ
⇒ 7/6, 20, 8/3, 17, 9/7, 21
[小倉南]第2・4日原則<総合農事センター2F>
- 10:30~ ベーシック/プライマリ
- 13:00~ ミドル/アドプロ※(/ロボプロ1年目)
⇒ 7/14, 28, 8/11, 25, 9/8, 22
※8月よりアドバンス15:00~とさせて頂きます(~12月移行期間)。
4. お知らせ
1) 小倉北ベーシック/プライマリ時間シフト8月よりベーシック/プライマリ時間を30分遅らせ、10:30~12:00とさせて頂きます。
2) 小倉南アドバンス時間シフト
8月よりアドバンス時間をミドル後にシフトし、15:00~16:30とさせて頂きます。
8~12月を移行期間として、この間は13:00/15:00どちらでもお受けしますが、なるべく15:00~をお奨めします。
農事センター利用時間の制約上、ミドル/アドバンスを併行しておりましたが、より良い指導&履修環境のため、ご協力をお願い申し上げます。
(これにて小倉北・南教室が同一時間帯になります)
3) 全国大会 8/24(土) 東京大学 安田講堂
アイデアコンテストの時期が近づいてきました。
http://robocobo.sakura.ne.jp/blog/convention/RobotConv2019.pdf
◆アイデア部門:7/19(金)九州本部必着にて、所定の応募用紙・プレゼン動画(2分以内)を郵送
《全国大会 観覧申込み - 定員に達し受付終了》
http://kids.athuman.com/robo/event/convention/2019/
4) アイデア九州地区大会 7/26(金) 福岡市科学館サイエンスホール
全国大会に先立ち、九州地区大会も開催されます。
(発表練習会の位置付けであり、全国大会の予選ではありません)
発表練習のみならず、他人の面白アイデアを伺うチャンス!
福岡県内の皆さんには、地の利があります。ご家族で参加しましょう!
◆アイデア地区大会:7/16(火)大会本部必着にて、所定の応募用紙を郵送
《地区大会 観覧申込み - 6/21(金)17:00~定員まで》
http://kids.athuman.com/robo/event/convention/2019/
5) テクニカル九州地区予選 7/26(金) 福岡市科学館サイエンスホール
テクニカル(アドプロコース用スピード競技)コンテストは地区予選から始まります。
◆テクニカル部門:7/2(火)10:00~7/18(木)17:00までにWeb申込み
《地区大会 観覧申込み - 6/21(金)17:00~定員まで》
http://kids.athuman.com/robo/event/convention/2019/
6) 5教室合同アイデア発表会
いきなり全国大会はハードルが高いですので、まずは地区大会で、発表をするも聞くも、あまり気負わず親子で楽しみましょう!
その前に、小倉北教室の昼休み時間にアイデア発表会を開催しますので、親子で是非ご参加下さい。
先ずは宣言しちゃって、やる気になってみよう! 君だけのロボットをひねり出そう!
■7/7(日) 11:45-12:45 北九州パレス2F 第1研修室
【発表シート】6月第2回授業で配布した『アイデアシート』または任意の紙面
http://robocobo.sakura.ne.jp/blog/convention/IdeaSheet2019.pdf
【発表内容】「こんな(動きの)ロボット作るつもりです」程度の意志表明(ロボット披露も可)
【発表形式】1人2分程度(プロジェクター・マイク使用)
7) 5教室合同テクニカルコンテスト研究会
7/26九州地区予選に出場できるアドプロ生向けに、下記の教室時間を開放します。
奮って参加下さい!
- 退場時間は自由です
- 教室の振替利用には事前連絡ください
- 教室の追加利用には事前連絡不要です
- コンテスト出場者の振替手数料は頂きません(在籍中の方のみ)
・7/ 6土 東福間 でこぼこ 17:30-20:00
・7/ 6土 八幡東レインボープラザ4F 17:30-21:00
・7/ 7日 小倉北 北九州パレス2F 15:00-20:30 ※場所ご注意
・7/13土 なかまハーモニーホール2F 17:30-21:00
・7/14日 小倉南 農事センター2F 10:30-16:00 ※AM~OK
・7/20土 東福間 でこぼこ 17:30-20:00
・7/20土 八幡東レインボープラザ4F 17:30-21:00
・7/21日 小倉北 北九州パレス2F 15:00-20:30 ※場所ご注意
8) IchigoJam初級プログラミング ~ハイパーオリンピック編~ 終了
6/29(土)東福間、6/30(日)北九州パレスにて、計14組の方に参加頂きました。
ボタンの連打で100m走タイムを争ったり、200mハードル走のゴールを目指してタイミング良くジャンプしたり、シンプルな面白さに子供も大人も(先生も!)燃えていました。
次回11/4(月・祝) 開催予定の講座をお楽しみに。8月ミニ講座を下記にご案内します。
9) 夏休み体験講座(理科/ロボット/プログラミング)
いつものロボット教室とは異なる刺激を。夏休みの自由研究にもどうぞ。
http://robocobo.sakura.ne.jp/blog/lab/SummerProgram2019.pdf
http://robocobo.sakura.ne.jp/blog/lab/IJ-B1908.pdf
【内容】↑PDFをご覧下さい
【講師】中野・佐藤
【会場】北九州パレス(勤労青少年文化センター) 2F
【申込方法】メールにてお申込み下さい。7/15〆切・先着順です。
【申込条件】
- 原則として、8月お引落し額(9月分)に加算して徴収させて頂きます。
7/15~キャンセル・欠席により空席が発生した場合は返金できません。
(キットと製作テキストのみお渡しします)
- 保護者の方・お子様(対象年齢未満)ご同伴可
- IchigoJam初級ミニゲーム編は、これまでの長編プログラムから趣向を変え、
短時間で、ごく短いプログラムを生徒さん自身のアイデアで改変しながら、
100%理解を促すことに重きを置きます。(高学年さんにも不足ありません)
(税別)
◇…科学実験 4,700円
◆…科学実験 3,800円
☆…IchigoJam 6,500円(小3~) 新規生向け講座+キット
★…IchigoJam 2,500円(小3~) ☆修了生向け
8/1(木)
◇10:00-12:00 ロボットハンド開発ラボ(小4~)
☆13:30-16:00 IchigoJamスタートアップ ~初めてのゲームプログラミング~
8/6(火)
★10:00-12:00 IchigoJam初級ミニゲーム#1
◆13:00-14:30 ふしぎセンサー~LEDを光らせよう~(小3~)
◆15:00-16:30 望遠鏡をつくろう(小3~)
8/8(木)
★10:00-12:00 IchigoJam初級ミニゲーム#2
◆13:00-14:30 ひかりマジック ワン・ツー・スリー(5歳~)
◆15:00-16:30 人工イクラを作ってみよう(小1~)
8/20(火)
★10:00-12:00 IchigoJam初級ミニゲーム#3
◆13:00-14:30 音にさわろう!スピーカー工房(小1~)
◆15:00-16:30 君には名探偵の素質があるか?(小3~)
10) 8月~新ミドルコース(プログラミング対応)へリニューアル[再掲]
ミドルコースがアドプロコース用のマイコン・センサー類を一部下ろす形で、8月~タブレットを用いた簡易プログラミングに対応します。
【キット代(税別)ご負担の流れ】
~7月:入会時2.85万円→アドプロ進級時2.7万円
8月~:入会時2.85万円→ミドル進級時1.8万円→アドプロ進級時0.9万円
従来ミドル内容をベースとした改編ですので、進級タイミングに関わらず、新旧ミドル合わせて18ヶ月満期の履修が原則となります。
8月時点でミドル継続中の方は、残り期間に応じて、新旧コースの選択肢を提供いたします。詳細は対象の方へ個別にご案内して参ります。
http://robocobo.sakura.ne.jp/blog/0227_newmiddle.pdf
11) 5月課題 高得点者 []内は教室と学年
◆プライマリ【14名平均 図形3.6】
5点…仲井[中間2], 川田[小倉北1], 末吉[小倉北1], 砂川[小倉北1], 鑓水[小倉北 年長]・村上(怜)[小倉南2]
◆ベーシック【22名平均 図面2.9+設問2.4=5.3】
10点…柴田[小倉北4]
9点…なし
8点…中村[東福間4], 下木[八幡東4], 野口[八幡東5], 橋本[小倉南2], 林田[小倉南2]
7点…なし
◆ミドル【19名平均 図面3.0+設問2.3=5.3】
10点…なし
9点…なし
8点…樋口[八幡東5]
7点…渡邉[中間5], 重藤[八幡東8], 森崎[八幡東4], 竹内[小倉北5]
◆アドバンスプログラミング【4名平均 図面7.5+設問4.8=12.3】
19点…橋本[小倉南5]
16点…山本[中間7]
東福間・中間・小倉北教室 佐藤 / 八幡東・小倉南教室 中野