2.今月の課題
3.今後の授業スケジュール
4.お知らせ
1. 5月授業内容
1.0 <スタートアップ(全コース)>
割愛します。
1.1 <プライマリーコース『ロボシーソー』>
割愛します。
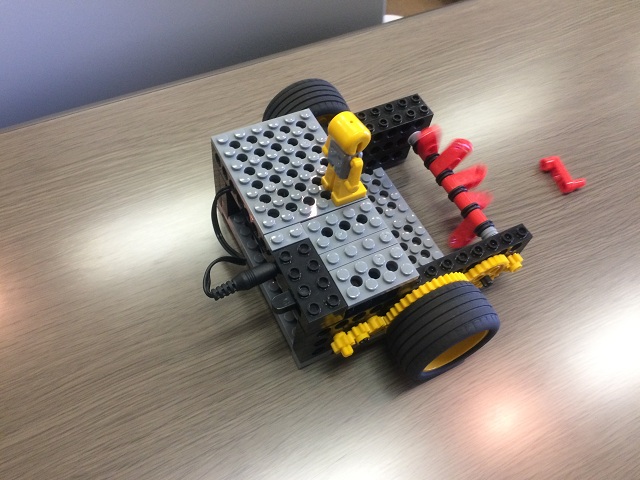
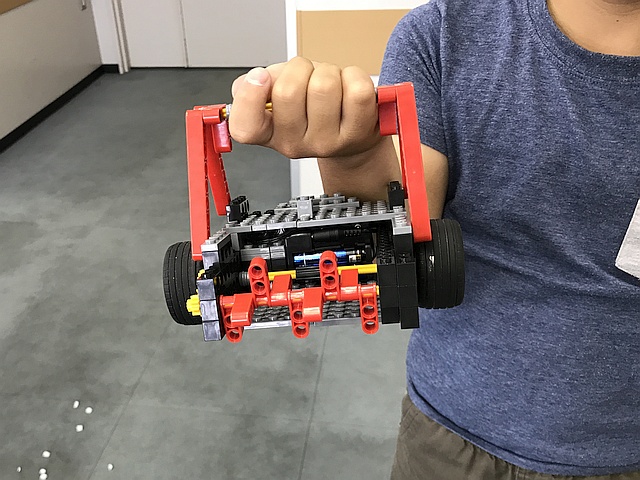
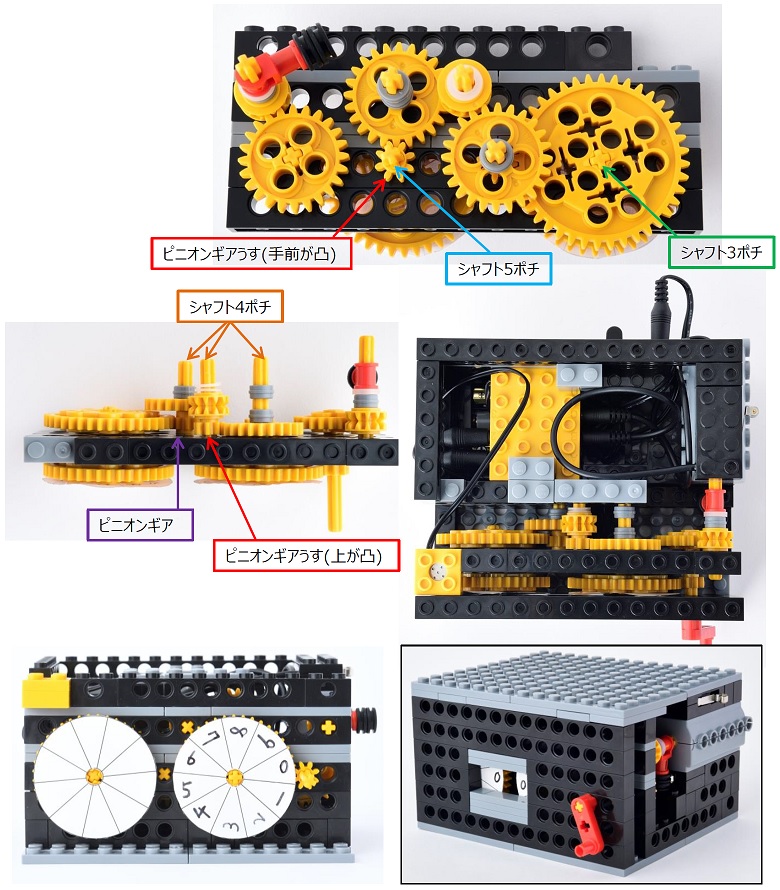
1.2 <ベーシックコース『ロボクリーン』>
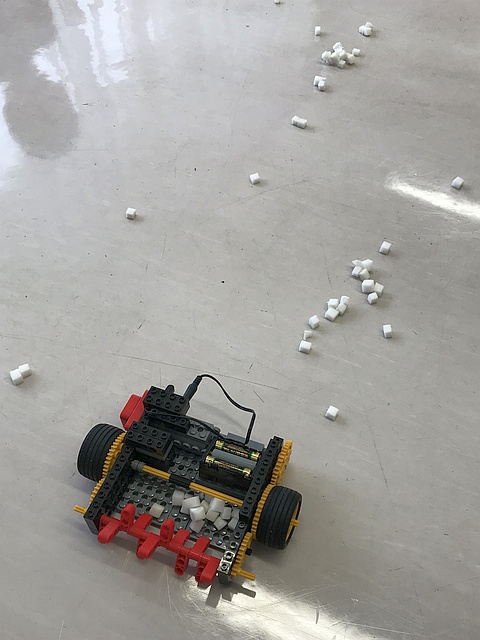
おそうじロボットです。
90°ずつ向きをずらした9本の赤い“ブラシ”を高速回転させる様がにくいですね!
吸引(きゅういん)こそしませんが、あのロボット掃除機『ルンバ』を彷彿(ほうふつ)とさせます。
掃除機として、大事な工夫点があります。
ブラシは高速回転させたいが、本体の走行スピードは…?
疾走(しっそう)されては困るので、タイヤはゆっくり回さなくてはなりませんね。
この相反(あいはん)する要求をどうやって1つのモーターで実現するかです。
部品配置は、モーター ⇒ タイヤ ⇒ ブラシ の順に並んでいます。
回転速度は、速い ⇒ 遅い ⇒ 速い です。
つまり、モーターを一旦(いったん)減速(げんそく)してタイヤを回した後、増速(ぞうそく)してブラシに伝える構成が必要であり、それが筐体(きょうたい)の側面に並んだ大小6枚のギアの役割なのです。
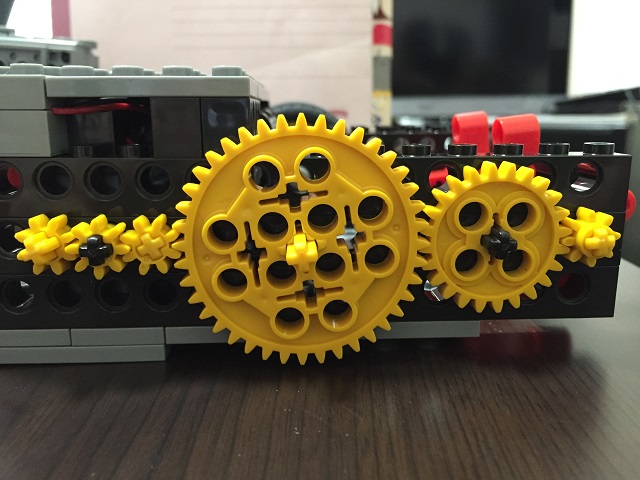
3連のピニオンギア(歯数8)がタイヤと同軸のギアL(歯数40)を回すので、1/5に減速されます。
その後、ギアM(歯数24)を経由してブラシと同軸のピニオンギア(歯数8)を回します。
途中のギアMは気にせず(*1)、ギアL ⇒ ピニオンギア と考えて、5倍の増速になります。
つまり、1/5×5=1 で、モーターと同じ回転数(等速)に戻してブラシを回しているのですね。
《ギアの回る速さについて勉強したい人は、下記を読んでください》
http://robocobo.sakura.ne.jp/blog/robot/bas-1711.pdf
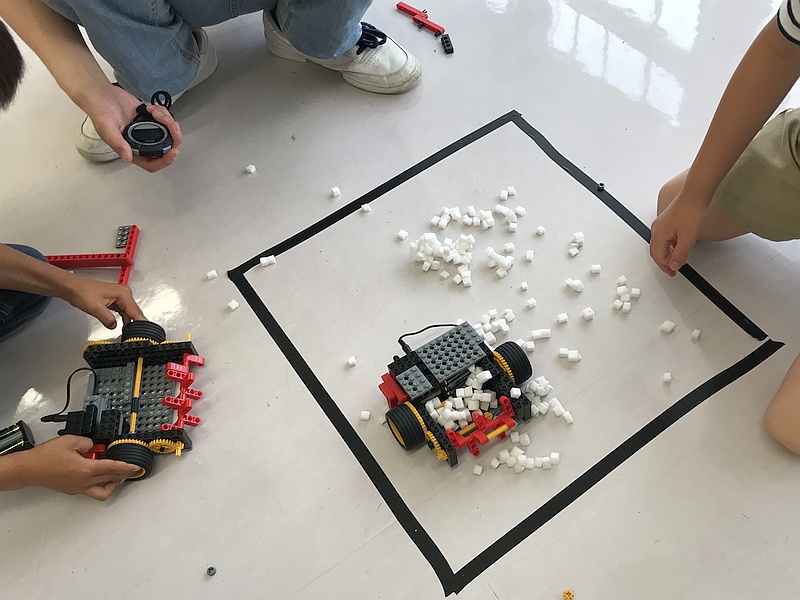
2日目最後の競技は、ガチンコおそうじ対決!
狙(ねら)いを定めたロボットの前に、小さくカットしたスポンジのゴミを散りばめ、「よーいドン!」でゴミの争奪戦(!?)です。
「そこまで!」の合図までに内部に取り込めたゴミの数を競います。

皆さん、対戦になると燃えますね~。
まして、改造の良し悪しがゴミの数に表れますから、時間いっぱい改造に勤(いそ)しむ人もいましたが、かえって本番で成績が振(ふ)るわず、悔(くや)しい思いをしていました。
このロボットで苦心(くしん)するのは、赤いブラシが(当然に)固いプラスチック部品であり、柔軟性(じゅうなんせい)がないので、筐体との隙間(すきま)にゴミが挟(はさ)まってブラシが止まりやすいことです。
高速回転(増速)させる分、回転力(トルク)が弱いので、たやすく停止します。
この問題を解決しようと、過去にすばらしいチャレンジも見られました。
ブラシの毛(クロスジョイント)が固いのは仕方がないので、シャフトに“半固定”し、毛一本一本の回転力を弱めるアイデアです(*2)。
1) クロスジョイントをシャフト(十字形断面)の周りに固定するのではなく、自由にぶら下がるよう、十字穴ではなく丸穴に通す
2) クロスジョイント同士が密着するよう、ブッシュやグロメットで隙間を埋める
これには、
●詰まらない限り、全ての毛がシャフトと一緒に回転する
●詰まった毛だけ止まり、ブラシ全体の回転を止めない
という設計思想がしっかり体現されています。
肝心(かんじん)のゴミ取り性能はともかく、何か問題に直面した時、限られた部材(キット)の中でも「何か解決方法がある」という好例です。
他には、毛として、回転シャフトに輪ゴムか結束バンドをくくり付けてはどうでしょう。
内部の汚れが問題になるほどゴミが取れてしまうかもしれませんよ。
*1 ギアMを気にして計算しても、40/24×24/8=40/8=5 と同じです。間にギアMを挟んでいる理由は、回転方向と位置を調整するためです。
*2 スリップトルク(滑り摩擦力を利用した回転力伝達)や、トルクリミッター(回転力制限装置)呼ばれる機械要素です。
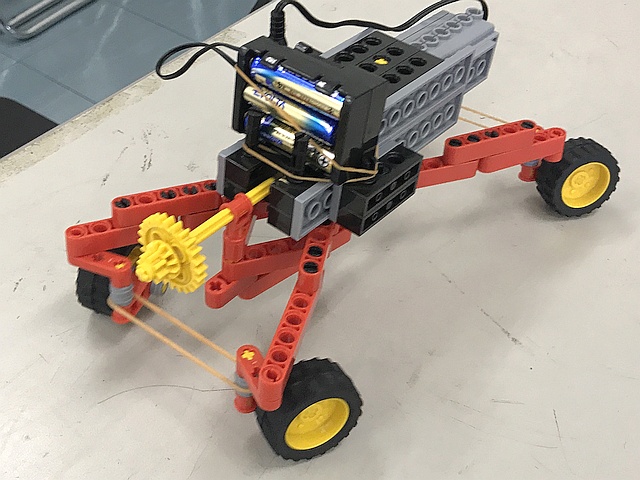
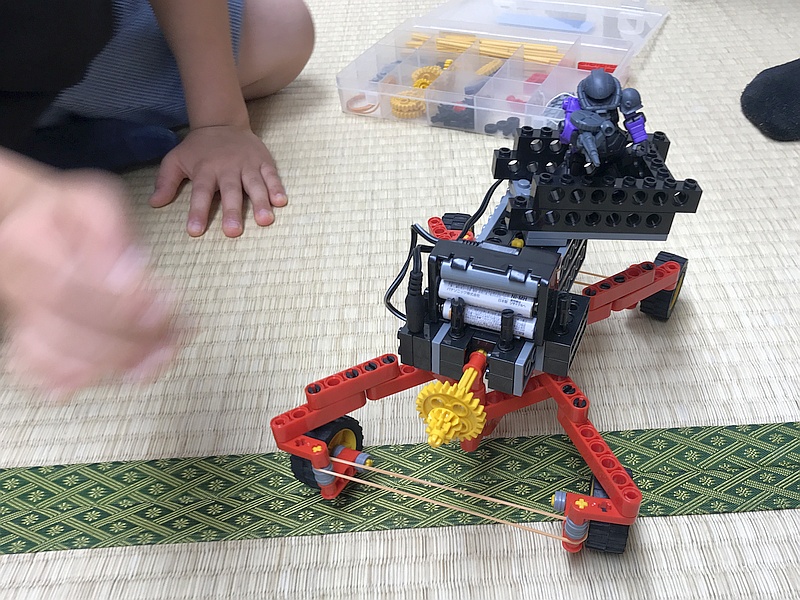
1.3 <ミドルコース『アメンロボ』>
アメンボのような動きで進みますが、推進(すいしん)原理は異なります。
ミドルコース随一(ずいいち)と言っていいくらい、突き詰めれば高度な学習テーマに満ちた、難しいロボットです。
4脚キャスター付き椅子(いす)のように、X字に交差させたロッドの先端4箇所に、自在に向きを変えるタイヤSを取り付け、ロッドの交差点に本体を載せています。
1日目では、モーターで回転するクランク機構(*1)により、ロッドのX字を閉じたり開いたりする動きを実現しました。
製作はこれでほぼ完成なのですが、タイヤSはその向きがX字の開閉に合わせて阿波(あわ)踊りの手先のように自在変化するだけで、一向に進む気配がありません。
どうしたものでしょう。2日目までの課題にしてみました。
よく観察すると、タイヤは向きを変えているだけでなく、少し転がっては逆方向に戻る動きも見られますので、学習経験を生かして、
「ラチェット機構により回転を一方向に制限してやればいい」
というアイデアもありますが、前進させるまでには至らないようです(*2)。

2日目テキストの通り、前輪同士と後輪同士をくくるように2本の輪ゴムをキャスターの根元に掛けてみました。
するとどうでしょう。輪ゴムがキャスターを内側に引っ張ることで、タイヤの向きが前後方向に“ほぼ”そろいました。
スイッチを入れてみると、1日目が嘘のようにスイスイ進みます。
X字の開閉に合わせて、床面との摩擦により、前後輪とも、ハの字 ⇔ 平行 ⇔ 逆ハの字の形を繰り返します。

X字を開く力は、左右両輪を前方に向かって開かせ(逆ハの字)、
特に後輪(*3)が平泳ぎで水を(またはスケーティングで雪や氷を)掻くように、推進力に変換されています。
X字を閉じる力は、左右両輪を前方に向かって閉じさせ(ハの字)、
特に前輪(*3)で地面を抱き込んで後方へ追い遣(や)るように、推進力に変換されています。
輪ゴムの弾性力により、
(1) タイヤを前後方向に緩(ゆる)やかにそろえる
(2) 地面との摩擦力でタイヤの向きが変化するのを少しだけ許す
ことが功(こう)を奏(そう)しているのです。
実際は、ここに書く程に簡単ではなく、X字リンクの歪(ゆが)みやタイヤの摩擦からくる開閉の重たさ、輪ゴムの強さ(*4)に起因して、推進させるまでに苦労し、競技する余裕もない難題でした。
ラチェットは使いませんが、タイヤが後ろに転がる瞬間があるようなら、それを阻止(そし)することで推進効率が上がるかもしれません(*5)。
《キャスターがハの字形に開閉し、推進力を生むメカニズムを勉強したい人は、下記を読んでください》
http://robocobo.sakura.ne.jp/blog/robot/mid-1711.pdf
*1 回転軸の回りで円形運動する別の回転軸をジョイント(関節)とするリンク機構で、回転運動⇔往復運動を変換する。手回しハンドル、自転車のペダル、ピストン式エンジンが主な利用例。
*2 過去に考案した生徒さんがいましたが、そもそもタイヤの向きがバラバラなので失敗しました。
*3 X字の開閉によってキャスターが前方へ運ばれる方。
*4 輪ゴムが弱ければタイヤの向きが定まらず、強ければモーターの力負けで停止します。
*5 下手をすると前進の摩擦も増えて効率が下がるかもしれません。
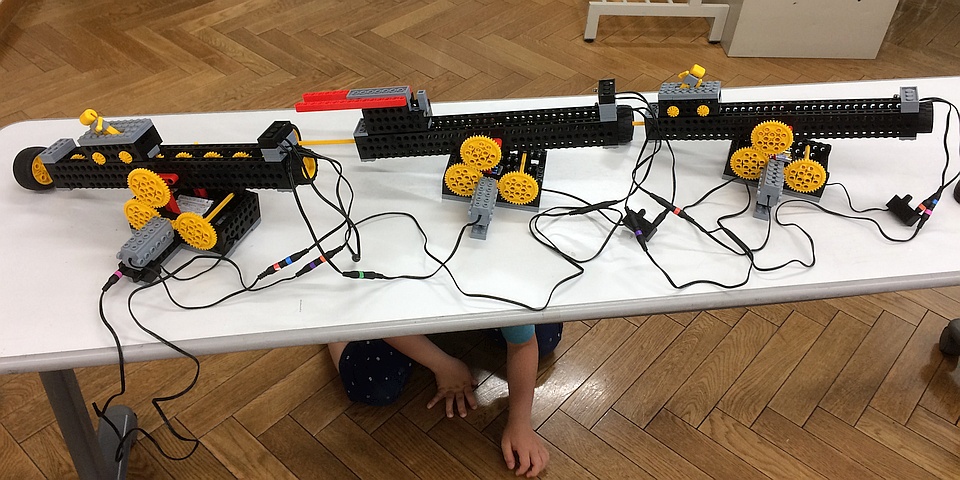
1.4 <アドバンスプログラミングコース『九九ボックス(2)』>
1・2日目の九九ボックスは、足し算するのみでした。
その方式は、スイッチを押した分だけ、1桁の文字板が順回りして、数値がカウントアップされるという単純なものでした。
とは言え、モーターが1回転するのをスイッチで検出しながら、その間に文字板(ギアL)の数字が1だけ進むような1/10減速ギアボックスの設計が秀逸かつ斬新です(*1)。
3・4日目の授業で、掛け算するプログラムを入力し、それに合わせて文字板を2桁に増やしました。9×9=81 なので2桁要りますね。
この掛け算プログラムは、どのような仕組みで動いているのでしょうか。
テキストでは、1の段から3の段までのモードを作りました。
1の段は、スイッチを1回押すとモーターが1回転し(*2)、文字板が1/10回転だけ回る、単なるカウンターです。
2の段は、スイッチを1回押すとモーターが2回転するプログラムです。
3の段は、スイッチを1回押すとモーターが3回転するプログラムです。
やっていることは、足し算と変わりません。
この掛け算プログラムは、足し算を何回も繰り返すに過ぎませんね。
「プログラムが長い割に、結局、足し算かよ!」と落胆する声が聞こえました。
でもね、加減乗除(+-×÷)は全て足し算で行うことができるんです!
実際、コンピュータ内部では、ほとんどの演算を足し算で行っています。
つまり、九九ボックスはコンピュータの走り!(少し言い過ぎかもしれませんが…)
例えば、2x3 の掛け算であれば 2+2+2 と、九九ボックス同様に2を3回足すことで計算できます(*3)。
引き算はどうでしょう。
この場合は「足してちょうど桁が上がる(10になる)数」を持ち出します。
2なら8、3なら7、5なら5、といった数です。これを補数(ほすう)といいます。
数を引く代わりに補数を足すことで、引き算は足し算に置き換えられます。
9-4=5 → 9+6=15 → 2桁目を無視して 5
2桁目を無視する手順が気に入らなければ、下のような式にすると良いでしょう。
9-4+10-10 = 9+(10-4)-10 = 15-10 = 5
勝手に10を足したので、後から10を引いています。結果は変わりませんよね。
この計算方法では、先に補数を求める必要がありますが、コンピュータ内部で扱う数字は0と1の2つしかありません。1+1=10(イチ・ゼロ)のように桁上がりします。
ですから、1の補数は0、0の補数は1と、簡単に決まってしまいます。
実際、電子回路にとってこの変換作業は楽チンなのです!
これを2進数と呼びます(*4)。
割り算は、この引き算の応用です。
割られる数から割る数を引き算していき、0になるまで何回引いたかを数えます。
8÷2 の計算ならば 8-2-2-2-2=0 ですから、4回引きました。
この4が割り算の答えになります(*3)。
苦労した割に、暗算でできる程度の計算しか行えない九九ボックスでしたが、コンピュータと近い計算方法だと思うと、何だか輝いて見えますね!
見えない? そうですか? よーく見てください、マイコンのLEDが輝いてますヨ!!
*1 ロボット教室で初登場。
*2 実際はスイッチを押している間に鳴る音の回数で指令します。
*3 実際に必ずしもこのように処理されているとは限りませんが、一つの方法として使われる場合があります。人間と違って、足し算こそ超高速にできるように作られているからです。
*4 「地球人は10進数を使っているようだ…指が10本だからかな…」by 火星人
1.5 <プロ1年目コース『オムニホイールロボット(2)』>
1ヶ月目に製作したオムニホイール(Omnidirectional Wheel;全方向車輪)ロボットの動きの原理を理解し、思い通りの動きをプログラム上で指示できるようになるまでの2ヶ月目の授業です。
1日目は、改めてオムニホイール(車輪)の仕組みを考察し、3つの車輪を任意の速さ・向きに回したときの進行方向が“力(ベクトル)の合成”によって求まることを学びました。
ここでのベクトルは、車輪の回転の向きと速さを、それぞれ矢印の向きと長さで(紙面上に)表したものです。
2つのベクトルの合成は、まず作用点(ベクトルの始点)を重ねて、それが平行四辺形の2辺を形成するようにもう2辺を描き足し、作用点から発した対角線(=合力)の向きと長さで表します。
3つのベクトルを合成するには、任意の2つを合成した後、その合力と残りのベクトルをさらに合成します。
様々な練習問題を製図して解きつつ、プログラムの数値に反映して動きを確かめ、どんな3輪の回転の組合せでも、ロボットの進行方向を求めることができるようになりました。
2日目に、ロボットの回転する動きを考察します。
1日目では、進行方向を割り出すことができましたが、ロボットが向きを変えずに移動(=並進運動)する場合は、これで十分でした。
しかし、実際は互いに離れた3輪による作用点(ベクトルの始点)を一点(例えば、ロボットの中心)に集めて合成するために、本体が回転しようとする力(モーメント)を扱うことができませんでした。
例えば、3輪とも同じ速さで時計回りに回転させる場合、ベクトルの合成結果は長さゼロの“点”となって、ロボットが移動しないことを言い当てますが、実際の動きは、移動こそしないものの、その場でぐるぐる回り続けます。
この回る動き(=回転運動)を予測できるようにします。
レンチやスパナを想い起こしてください。
支点(回転中心)のある物体に対し、支点から離れた場所(作用点)に、(支点に向かう向きとは異なる)力を加えると、物体は支点の周りで回転します。
この物体を回そうとする作用力を“モーメント”といいます。
支点と作用点の間の距離を単に“長さ”と呼ぶと、
[モーメント]=[長さ]×[力の大きさ]
という関係があり、長いほど回す作用が強くなるという、てこの原理を表しています。
オムニホイールは、3輪とも円周上(円形ボードの縁)に取り付けられているため、円形ボードの中心を支点としてロボットの回転を考えたとき、各ホイールまでの[長さ]が全て等しいので、オムニホイールロボットの[モーメント]を推し量る上では、[力の大きさ](今回はホイールの回転スピード)だけ考慮すればよいことになります。
難しく述べましたが、簡単には、時計回りと反時計回りの回転スピードを差し引きして、ゼロなら回転せず、ゼロ以外ならその値の分だけ優勢な方向に回転する、と言えるのです。
オムニホイールロボットがカーブの軌跡を描いて移動するとき、並進運動だけで実現すれば、飛来するUFOのように向きを変えず、並進運動+回転運動を組み合わせれば、自動車のように自然に曲がることもできるのです。
3つのオムニホイールが生み出す、どんな複雑なロボットの動きも、
“ベクトルの合成”で求まる並進運動と、
“モーメントの合成”で求まる回転運動とに分解して説明できるのです。
最終の3ヶ月目では、このロボットに“触覚”と“頭脳”を植え付け、ロボカップに通ずる自律型ロボットに仕上げます。
2. 今月の課題
<スタートアップ(全コース)>
特にありません
<プライマリーコース>
- オリジナル図形プリント
<ベーシックコース>
- オリジナル課題プリント(3面図+設問)
- 上記授業内容を精読する(概ね3年生以上/低学年は補助の下で)
<ミドルコース>
- オリジナル課題プリント(3面図+設問)
- 上記授業内容を精読する
<アドバンスプログラミングコース>
- オリジナル課題プリント(見取図+設問)
- 上記授業内容を精読する
<プロ1年目コース>
- 上記授業内容を精読する(該当テキストページを見ながら)
3. 今後の授業スケジュール
◆小倉北7月は代替施設『北九州パレス(勤労青少年文化センター)』で開催します。
◆小倉北8月よりベーシック/プライマリ10:30~とさせて頂きます。
◆全国大会の為、中間8/24→8/31へシフトします。
――――――――――【佐藤教室長】――――――――――
[東福間]第1・3土原則<学習ルームでこぼこ>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドプロ
⇒ 6/1, 15, 7/6, 20, 8/3, 17
[中間]第2・4土原則<なかまハーモニーホール>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドプロ
⇒6/ 8 第1回 3F会議室2
6/22 第2回 3F会議室2
7/13, 27, 8/10, 31※
※全国大会の為、8/24→8/31へシフトします。
[小倉北]第1・3日原則<ムーブ>
- 10:00~ ベーシック/プライマリ(8月より10:30~)
- 13:00~ ミドル/ロボプロ1年目[暫定]
- 15:00~ アドプロ
⇒6/ 2 第1回 5F小セミ(AMのみ企画1・2)
6/16 第2回 5F小セミ
7/7※, 21※, 8/4, 18
※7月は代替施設『北九州パレス(勤労青少年文化センター)』で開催します。
――――――――――【中野教室長】――――――――――
[八幡東]第1・3土原則<レインボープラザ4F>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドプロ
⇒ 6/1, 15, 7/6, 20, 8/3, 17
[小倉南]第2・4日原則<総合農事センター2F>
- 10:30~ ベーシック/プライマリ
- 13:00~ ミドル/アドプロ(/ロボプロ1年目)
⇒ 6/9, 23, 7/14, 28, 8/11, 25
4. お知らせ
1) 小倉北ベーシック/プライマリ時間シフト8月よりベーシック/プライマリ時間を30分遅らせ、10:30~12:00とさせて頂きます。
7月~とお伝えしていましたが、全国大会活動の為に延期します。申し訳ありません。
2) 全国大会 8/24(土) 東京大学 安田講堂
アイデアコンテストの時期が近づいてきました。6月第1回授業日に案内冊子を配ります。
http://robocobo.sakura.ne.jp/blog/convention/RobotConv2019.pdf
◆アイデア部門:7/19(金)九州本部必着にて、所定の応募用紙・プレゼン動画(2分以内)を郵送
《全国大会 観覧申込み - 6/21(金)17:00~定員まで》
http://kids.athuman.com/robo/event/convention/2019/
3) アイデア九州地区大会 7/26(金) 福岡市科学館サイエンスホール
全国大会に先立ち、九州地区大会も開催されます。
(発表練習会の位置付けであり、全国大会の予選ではありません)
発表練習のみならず、他人の面白アイデアを伺うチャンス!
福岡県内の皆さんには、地の利があります。ご家族で参加しましょう!
◆アイデア地区大会:7/16(火)大会本部必着にて、所定の応募用紙を郵送
《地区大会 観覧申込み - 6/21(金)17:00~定員まで》
http://kids.athuman.com/robo/event/convention/2019/
4) テクニカル九州地区予選 7/26(金) 福岡市科学館サイエンスホール
テクニカル(アドプロコース用スピード競技)コンテストは地区予選から始まります。
◆テクニカル部門:7/2(火)10:00~7/18(木)17:00までにWeb申込み
《地区大会 観覧申込み - 6/21(金)17:00~定員まで》
http://kids.athuman.com/robo/event/convention/2019/
5) 5教室合同アイデア発表会
いきなり全国大会はハードルが高いですので、まずは地区大会で、発表をするも聞くも、あまり気負わず親子で楽しみましょう!
その前に、小倉北教室の昼休み時間にアイデア発表会を開催しますので、親子で是非ご参加下さい。
先ずは宣言しちゃって、やる気になってみよう! 君だけのロボットをひねり出そう!
■6/16(日) 11:45-12:45 男女共同参画センター(ムーブ)5F 小セミ
【発表シート】6月第1回授業で配布する『コンセプト発表用 連想シート』または任意の紙面
http://robocobo.sakura.ne.jp/blog/convention/ConceptSheet2019.pdf
【発表内容】「こんな(名前の)ロボット作ろうかなと思ってます」程度の意気込み(ロボット不要)
【発表形式】1人1分程度(プロジェクター・マイク使用)
■7/7(日) 11:45-12:45 北九州パレス2F 第1研修室
【発表シート】6月第2回授業で配布する『アイデアシート』または任意の紙面
http://robocobo.sakura.ne.jp/blog/convention/IdeaSheet2019.pdf
【発表内容】「こんな(動きの)ロボット作るつもりです」程度の意志表明(ロボット披露も可)
【発表形式】1人2分程度(プロジェクター・マイク使用)
6) 5教室合同テクニカルコンテスト研究会
7/26九州地区予選に出場できるアドプロ生向けに、下記の教室時間を開放します。
奮って参加下さい!
- 退場時間は自由です
- 教室の振替利用には事前連絡ください
- 教室の追加利用には事前連絡不要です
- コンテスト出場者の振替手数料は頂きません(在籍中の方のみ)
・6/ 1土 東福間 でこぼこ 17:30-20:00
・6/ 1土 八幡東レインボープラザ4F 17:30-21:00
・6/ 2日 小倉北 ムーブ5F 15:00-17:30
・6/ 8土 なかまハーモニーホール3F 17:30-21:00
・6/ 9日 小倉南 農事センター2F 13:00-16:00
・6/15土 東福間 でこぼこ 17:30-20:00
・6/15土 八幡東レインボープラザ4F 17:30-21:00
・6/16日 小倉北 ムーブ5F 15:00-17:30
・6/22土 なかまハーモニーホール3F 17:30-21:00
・6/23日 小倉南 農事センター2F 13:00-16:00
・7/ 6土 東福間 でこぼこ 17:30-20:00
・7/ 6土 八幡東レインボープラザ4F 17:30-21:00
・7/ 7日 小倉北 北九州パレス2F 15:00-20:30 ※場所ご注意
・7/13土 なかまハーモニーホール2F 17:30-21:00
・7/14日 小倉南 農事センター2F 10:30-16:00 ※AM~OK
・7/20土 東福間 でこぼこ 17:30-20:00
・7/20土 八幡東レインボープラザ4F 17:30-21:00
・7/21日 小倉北 北九州パレス2F 15:00-20:30 ※場所ご注意
7) 全国大会への教室としての取り組みスタンス
コンテストへの出品・発表は、創作力や理解力など、ロボットの総合力を一気に高めるチャンスです。
ご家族行事として参加下さい。
特にアドプロ生は、原則として全員テクニカル(スピード競技)部門に出場して頂きます。
昨年まで(旧アドバンス~第1回アドプロ)のライントレーサーから一転し、今年はミッション達成型のスピード競技に変わりました。
昨年同様に、物議を醸す(?)くらい、今年も皆さんの知力で暴れ回って下さい!
(アイデア部門への出品も可能ですので、希望者はお伝え下さい)
どの部門の挑戦者も、6・7月テキストのカリキュラムを割愛して、コンテスト作品に注力しても構いません。
8) 第3回 IchigoJamマイコンプログラミング定期講座
第1回 12/24(月・祝) サウンド 編
第2回 3/21(木・祝) ゲーム工作編 に続き、
第3回 6/29(土)・30(日) ハイパーオリンピック編 を開催いたします。
【6/1~9配布チラシ】
http://robocobo.sakura.ne.jp/blog/lab/IJ-B1906.pdf

「ハイパーオリンピック」とは、初代ファミコン時代にコナミから発売されていた陸上競技ゲームです。
ボタンの連打で記録を伸ばすスポーツ大会ゲームの走りとなりました。
今回は、そのシンプルな面白さをIchigoJamでプログラミングしてみましょう。
友達同士で記録を競い合い、勝利に沸き、そして敗北に涙しましょう。
☆スタートアップ(SU)未受講の方は、6/15東福間AM or 6/23小倉南AMをご検討下さい。
SU講座7,020円のみでも楽しめますので、プログラミング体験にお奨めします。
(マイコンを持ち帰り、継続できます)
http://robocobo.sakura.ne.jp/blog/lab/IJ-SU1906.pdf
【講座名】
IchigoJam初級ゲームプログラミング ~ハイパーオリンピック編~
【内容】
前半は、キー連打でプレイヤーがダッシュし、100m走タイムを計測するプログラムで大会記録を競います。
後半は、ハードル(障害物ジャンプ)走ゲームをプログラミングします。
【講師】中野・佐藤
【会場】下記いずれか
・6/29(土) 東福間教室 (学習ルームでこぼこ)
・6/30(日) 北九州パレス(勤労青少年文化センター) 2F
【時間】10:00~15:00 (昼休み12:00-13:00)
【対象】下記の小3~中学生 15名(保護者同伴可)
a) スタートアップ修了者
b) スタートアップ☆受講可能な方(ご相談)
【必須費用】
a)の方 5,400円(材料費0円)
b)の方 12,420円(a)+SU受講料3,780+キット代3,240円)
【オプション費用】
A-1) 7インチモニター 4,320円(持込み必須/モデル不問)
A-2) PS/2対応USBキーボード1,620円(持込み必須/モデル不問)
【申込方法】下記を指定の上メールにてお申込み下さい。6/23〆切・先着順です。
<スタートアップ☆種別>
a) 修了済み b) 受講希望(ご相談)
<希望オプション>
A-1) 7インチモニター A-2) キーボード
【申込条件】
- IchigoJam本体・周辺機器の持込品が故障した場合は、代用品を購入頂きます。
- 原則として、7月お引落し額(8月分)に加算して徴収させて頂きます。
6/16~キャンセル・欠席により空席が発生した場合は返金できません。
(お申込品とテキストのみお渡しします)
※本活動はヒューマンアカデミー ロボット教室とは関係ありません
9) 夏休み体験講座[予告]
いつものロボット教室とは異なる刺激を。夏休みの自由研究にもどうぞ。
【会場】北九州パレス(勤労青少年文化センター) 2F
【詳細】6月報・チラシでお知らせします
(税別)
◇…科学実験 4,700円予定
◆…科学実験 3,800円予定
☆…IchigoJam 6,500円予定(小3~)
★…IchigoJam 2,500円予定(小3~)
8/1(木)
◇10:00-12:00 ロボットハンド開発ラボ(小4~)
☆13:30-16:00 IchigoJamスタートアップ ~初めてのゲームプログラミング~
8/6(火)
★10:00-12:00 IchigoJam初級ミニゲーム#1
◆13:00-14:30 ふしぎセンサー~LEDを光らせよう~(小3~)
◆15:00-16:30 望遠鏡をつくろう(小3~)
8/8(木)
★10:00-12:00 IchigoJam初級ミニゲーム#2
◆13:00-14:30 ひかりマジック ワン・ツー・スリー(5歳~)
◆15:00-16:30 人工イクラを作ってみよう(小1~)
8/20(火)
★10:00-12:00 IchigoJam初級ミニゲーム#3
◆13:00-14:30 音にさわろう!スピーカー工房(小1~)
◆15:00-16:30 君には名探偵の素質があるか?(小3~)
10) 4月課題 高得点者 []内は教室と学年
◆プライマリ【9名平均 図形4.7】
5点…神崎[中間1], 中村[中間2], 田中[八幡東1], 川田[小倉北1], 柴田(直)[小倉北2], 砂川[小倉北1], 鑓水[小倉北 年長]
◆ベーシック【19名平均 図面3.3+設問2.8=6.1】
10点…柴田[小倉北4]
9点…林田[小倉南2]
8点…野口[八幡東5], 藤野[八幡東4], 柴田(大)[小倉北1]
◆ミドル【18名平均 図面2.9+設問2.4=5.3】
10点…なし
9点…森崎[八幡東4]
8点…宮尾[八幡東6], 空閑[小倉南4], 馬渡[小倉南5]
7点…田中[中間7]
東福間・中間・小倉北教室 佐藤 / 八幡東・小倉南教室 中野