2.今月の課題
3.今後の授業スケジュール
4.お知らせ
1. 4月授業内容
1.0 <スタートアップ(全コース)>
割愛します。
1.1 <プライマリーコース『ロビット』>
割愛します。
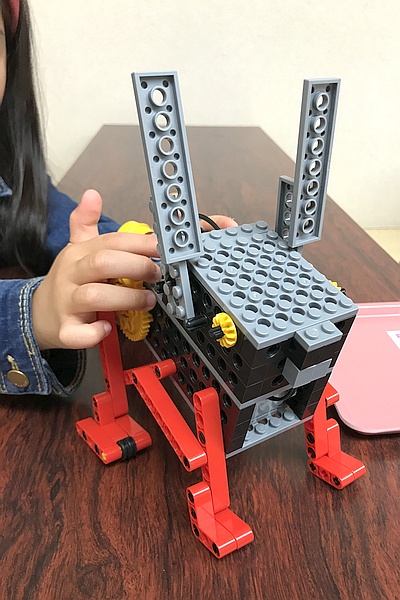
1.2 <ベーシックコース『ケンドーロボ』>
文字通り、剣道のように竹刀(しない)を振るロボットです。
剣道には、ここぞという時に、前進と「面!」の2つの俊敏(しゅんびん)な動きが必要です。
1日目では、モーターで左右両輪を駆動(くどう)し、前進・後退(こうたい)できるようにしましたが、竹刀は手動で前後に振り動かせるだけです。
竹刀を自動的に振るには、動力源と動作タイミングを与えなくてはなりません。
2日目に解決します。
動力源として、モーターを前進に利用してしまっているため、輪ゴム(の弾性力=だんせいりょく)を利用します。
前面に引っかけた輪ゴムが、竹刀を後方へ振り構(かま)えるにつれ引っぱられます。
動作タイミングとしては、背後(はいご)に振り構えた竹刀を振り下ろさないよう固定するロックが、相手にぶつかった衝撃(しょうげき)を検知して外れるよう、ロック部品と一体化してスライドするバンパーを前部に取り付けました。
衝突して押しこまれるバンパーを利用する点が、先月の『う王さ王』と似ていますね。

このロックがうまく外れるための工夫が設計されています。それは“スピード”です。
スピードがあればこそ、ぶつかった衝撃が大きくなり、ちゃんと検知できるのです。
だから、今回のロボットはちょろちょろと速く走り、捕(つか)まえるのが大変ではありませんでしたか?
設計上の違いは、モーター軸(じく)に取り付けるのがいつものピニオンギアではなく、もっと大きなギアMでしたね。
こうして(ギアMがギアMを回して)モーターの回転数を落とさずにタイヤに伝え、速く走らせていたのです(*1)。

最後の競技は「一本!」勝負。早く竹刀を振り下ろし、相手に当てた方が勝ちです。
バンパーを長くして早めに相手を検知し、それ以上に竹刀を長くしてリーチを伸(の)ばすことも一つの指針ですが(*2)、あまり欲張ると重くなって、動作にキレがなくなりましたね。
案外、ノーマル仕様の小柄なボディの方が、体格のいい先輩たちを打ち負かしていました。
なお、ケンドーロボ同士を対面させて、いざ取り組もうと発進させても、まっすぐ進まずに相手を打てないと悩むことがありました。
左右のタイヤは同一シャフトで直結しており、必ず等しく回転するので(*3)、一旦走り出した後はほぼ直進するのですが、最初の急加速する瞬間は、大きな力(タイヤのグリップ力)が地面にかかり、摩擦(まさつ)や重心バランスの関係で、どちらかのタイヤが多めにスリップしてしまうことが原因です。

底にパーツを付けて、摩擦やスリップのバランスを取ることで直進したり、あえてバランスを崩(くず)すことで曲がったりするようにも調整できましたね。
剣道家には見えなくなりますが、直進させるのに最も確実なのは、3輪や4輪車にするアイデアでした。
*1 同じ大きさのギア同士は、回転速度が同じに保たれます。このことを「減速しない」と言います。先月の『う王さ王』の改造例としても紹介しました。
*2 自分と相手のバンパーが当たるようだと、相手からも早く検知されるので、相手と高さを変えない限り、あまり有利とは言えません。
*3 モーター直結のギアが右タイヤを先に回していることが曲がる原因と分析する人もいましたが、そうではなく、左右のグリップ力のバランスがとれていない(完全にとるのが難しい)せいです。
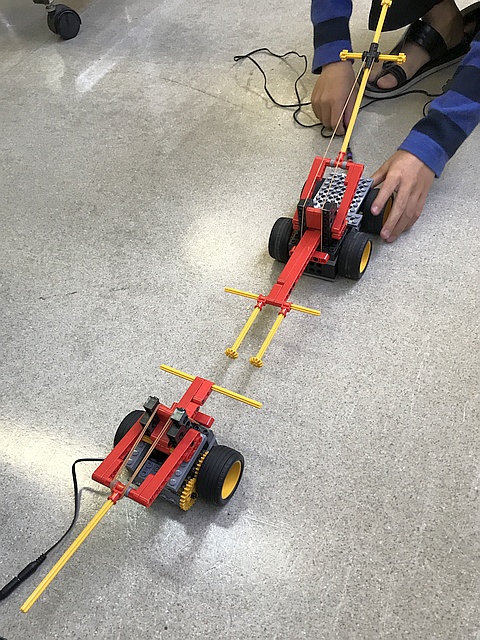
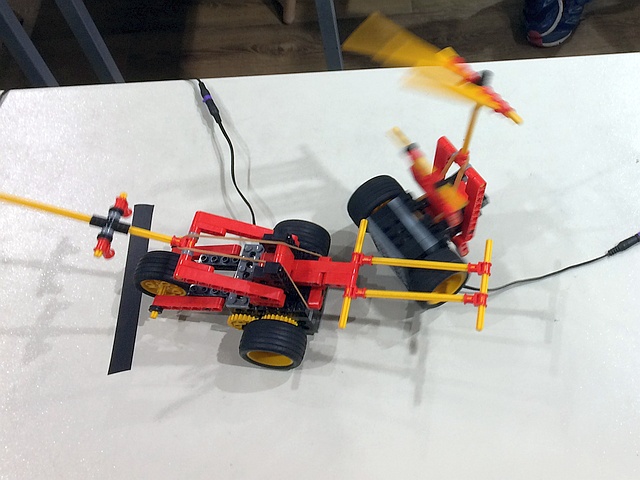
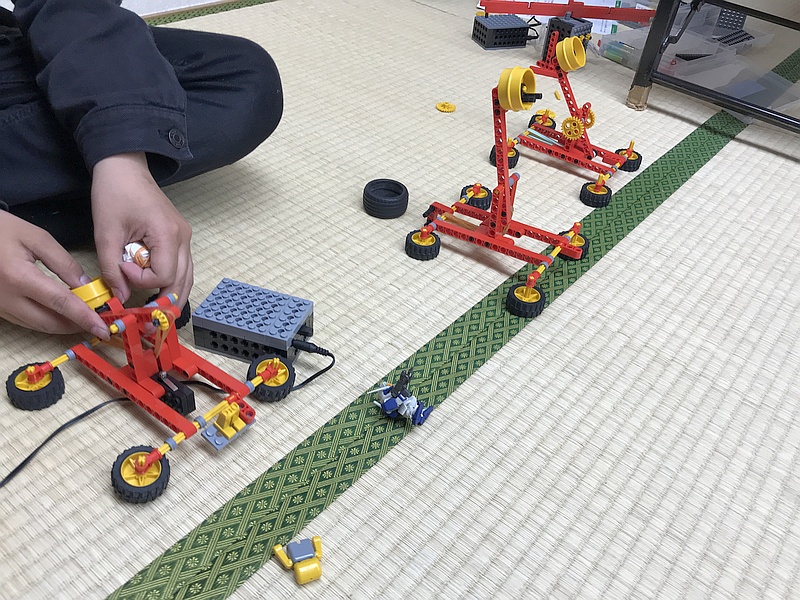
1.3 <ミドルコース『ロボバッター』>
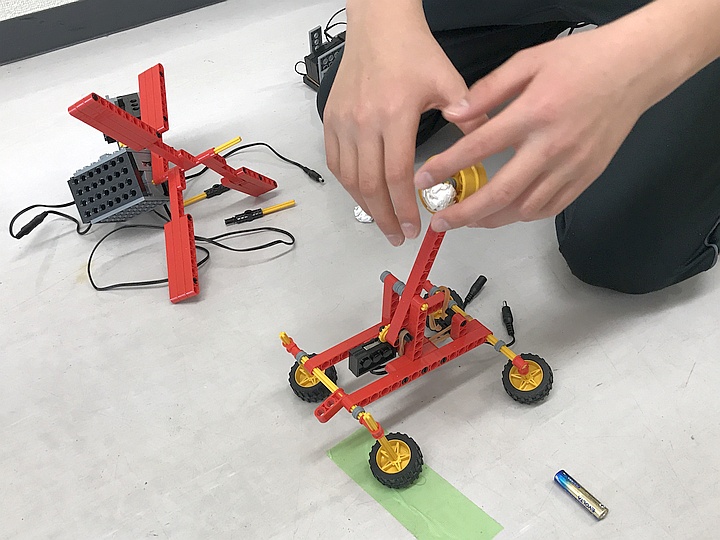
ピッチャーとバッターの2部構成です。
モーターは1つだけなので、その動力はバッターに譲って、ピッチングは輪ゴムを使います。
逆に設計することもできますが、この方がコントロールし易いでしょう(*1)。
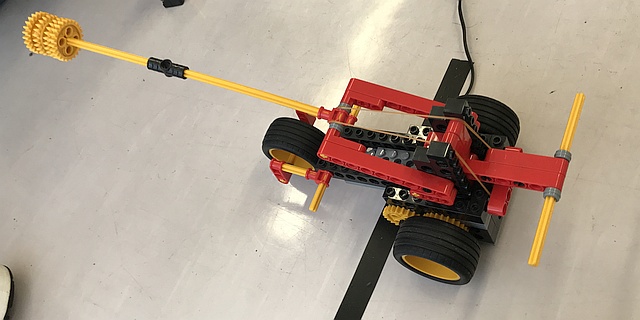
ピッチャーロボ(ピッチングマシン)の構造は、中世の戦争で利用された投石器そのものです。
いろんな物を投げ飛ばして、飛距離を観察してみました。
そこそこ重い物(ギアの塊)で体積が同程度なら、軽い方が遠くまで飛びました。
限られた輪ゴムのパワー(弾性エネルギー)で加速させ易いためです。
同程度に軽い物(ボール状に丸めた紙やティッシュ)なら、堅(かた)く丸めて体積を小さくした方が飛びました。
空気抵抗を受け難くなるためですね。
さて、投げられた物をバッティングするのは至難の業(しなんのわざ)です。
バットを振るタイミングの問題もありますが、そもそもピッチングが安定せず、同じ物を投げても飛距離がばらばら。
玉が加速中にバケット(ピッチャーの手)の中で動いてしまい、飛ばす方向やスピードが変わるからと考えられます(*2)。
まして、バッティングマシンのスイッチを手動でオンにする1日目のロボットでは、全くと言っていいほど玉に当たりません。
2日目にこれを自動化します。
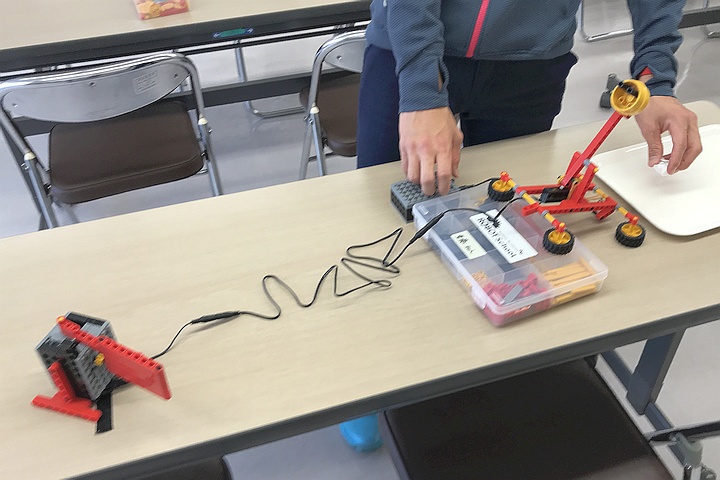
電池ボックスから出たケーブルは、先ずはピッチャーに備(そな)え付けたタッチセンサー(黒)を経由させ、延長ケーブルを通して遠くのバッターに接続します。
こうして、ピッチャーが玉を投げ終わった瞬間にバッター内のモーターが回り始め、バットを自動的に振るようになります。
さらに、いつまでもバットをぶん回し続けているのも格好悪いので、振り終わった位置にタッチセンサー(グレー)を備え付け、モーターを止めます。
これでバットを一回転分振るだけの、省エネ野球部になりました。
電池ボックス ⇒ タッチセンサー(黒) ⇒ タッチセンサー(グレー) ⇒ モーター
のような直列接続により、両方のセンサーがオンになる間だけ通電する仕組みができ上がります。

さて、肝心のバッティング精度ですが、ピッチングが安定しない中、タイミングだけは再現性を出せるので、二者間の距離や投球角度(*3)を調整すれば、5回中1回くらいは当てられるようになります。
ピッチングを安定化させた人なら、90%以上の確度で当たるでしょう。
こうして我々人間は、機械化の恩恵(おんけい)に与(あずか)るわけですね。
*1 その大きな理由は、くねくね曲がっていても構わない延長ケーブルを使って、瞬時に電気エネルギーを遠くへ輸送できるからで、投げた直後にバットを振らせるのが簡単です。
自動車も、電気化するほどコントロール性に優れます。
*2 つまり、バケットの中でぐらつかない大きさの玉にすることが、ピッチングを安定化するためのコツです。
*3 同じ初速度でも、投げ上げる角度によって飛距離が変わります。一般に45°が最も飛ぶと言われますが、実際は玉によって異なる空気抵抗を受けるため、40°前後になるようです。
初速度と角度は、アームが止まった(ピッチャーの手を離れた)瞬間で決まります。
1.4 <アドバンスプログラミングコース『九九ボックス(1)』>
電卓も100円ショップで買えて、計算マシンなんて大した価値が無いように思える現代ですが、
コンピュータが世に出回る前、大まじめに複雑な機械式計算機が開発され、高価で販売されていた時代が確かにありました。
『九九ボックス』の計算方式は、回転による足し算がベースという点で、
手回し計算機(日本では「タイガー計算機」が有名)および、
それをモーター駆動化した「モンロー(電動)計算機」を想起させます。
ここは、文章よりも、興味深いYouTube動画で歴史遺産を学びましょう。
■計算機の歴史
【題名】サイエンス・ピックアップ(8) 計算機の歴史から技術の進歩をたどる~東京理科大学近代科学資料館~
【動画】https://www.youtube.com/watch?v=mP8P2wKCujM&t=178s
【内容】
東京理科大学にある近代資料館の紹介動画です。
ここには、人類が計算を工夫して行うために作ってきた道具が展示してあります。
数を数えるための石ころに始まり、そろばん、計算尺、タイガー計算機、初期の電卓、その他大型計算機などが紹介してあります。
(手回し計算の体験ができますので、一度訪れてみたいものです)
■手回し計算器の実演
【題名】タイガー機械式計算器
【動画】https://www.youtube.com/watch?v=2aHdInr9_J8&t=43s
【内容】
タイガー計算器の実演動画です。
ダイアルをセットして右側のハンドルを回すと表示部に答えが現れます。
ハンドルを回して、ガリガリという動作音と共に答えが表示される様子は、現代の計算器にはない趣(おもむき)です。
■電動計算機の実演
【題名】モンロー計算機 完全マスター Monroe calculator 6N-212
【動画】https://www.youtube.com/watch?v=8WJk8rQse-I&t=47s
【内容】
モーターにより全自動化したモンロー計算機の実演動画です。
数値入力はボタン式になっており、操作性や計算速度が向上しています。
モータにより各部が動く様子は見ていて飽きません。
このように複雑な計算を機械部品のみで実現できたことに驚きます。
■タイガー計算機についての詳しい解説動画
【題名】学芸員の展示場ガイド「計算機 Part 3」@大阪市立科学館
【動画】https://www.youtube.com/watch?v=nGAYWAm6QB0
【内容】タイガー計算機の計算方法
【題名】Nippon Calculator HL 21
【動画】https://www.youtube.com/watch?v=A6l53sQ50f0&t=81s
【内容】機械式計算機の内部が動く様子
■いろいろな計算機器
【題名】学芸員の展示場ガイド「計算機 Part 1」@大阪市立科学館
【動画】https://www.youtube.com/watch?v=wrRJO0BRzfU
【内容】ダイヤル式加減算器とキー式1桁加算器
【題名】学芸員の展示場ガイド「計算機 Part 2」@大阪市立科学館
【動画】https://www.youtube.com/watch?v=at9KqMInPZ8
【内容】スライド式加減算器
【題名】学芸員の展示場ガイド「計算機 Part 4」@大阪市立科学館
【動画】https://www.youtube.com/watch?v=O10iuSTlODs
【内容】キーボード式計算器
1.5 <プロ1年目コース『オムニホイールロボット(1)』>
春タームとして、オムニホイール(Omnidirectional Wheel;全方向車輪)ロボットを製作し、リモコン操縦するまでの1ヶ月目の授業です。

1日目は製作です。
2層の円形ボードにモーター、オムニホイール、マイコンボード、無線モジュール、電池ボックスを組み付け、配線コネクタを差し込んでいきます。
殆どの作業がネジ留めですが、組み付ける順番の解決と、手先の器用さが要求されます。
日常において、あまり経験しない作業なので、悩みながらもパズルのようで楽しかったのではないでしょうか。
パソコンからサンプルプログラムを転送し、3つのホイールを指示通りの速さ・向きに回せることを確認して終了しました。

2日目に、ゲームパッド(プレステ用と同等!)と無線通信リンクを確立し、パソコンからラジコンプログラムを転送すると、アナログスティック(*1)を倒した分だけの速さで前後左右に移動することを確認しました。
また、調整用プログラムを転送してロボットの動きを観察し、個体差(重心やホイールの摩擦力の違い)による進行方向のズレを補正するための調整値(*2)を割り出しましたが、これは今回の学習テーマの本質ではありませんので、あまり気にしなくて良いです。

どのスティックをどれだけ倒したか、どのボタンを押したかにより、ロボット(3つのモーター)をどの向き(電流の+-)にどれくらいの速さ(電圧)で動かすかは、全てあなた(プログラム)が決めることです。
マイコンは、得意な計算・判断だけを、あなたに代わってあなたが決めたルール通りに素早く実行し、各部品に必要な命令(数値による指示)を間違いなく出してくれる便利な道具と考えてください。
オムニホイールの特徴は、黒い樽型ローラーの作用により、普通のタイヤとしての進行方向(回転方向)とは垂直の横方向(ホイールの回転軸方向)にズルズルっと滑ることです。
このホイールが120°間隔で3つ装着されることにより、自由自在に移動・旋回できそうなことは分かりましたが、これを力学的・数学的にどのように捉え、プログラム上の数値にどのように反映すべきかについては、次回で学びます。
*1 アナログ(連続量)はデジタル(離散量)の対義語ですが、アナログスティックは、倒した向き・強さを -128 ~ 127 など、マイコンが扱いやすい整数(とびとびの値=離散量)に変換しているため、厳密にはデジタル式なのですが、ON/OFF判定だけの○×△□ボタンと違って、最小値~最大値を十分細かく刻んで表しているため、人間には滑らかな連続量で制御しているように感じられます。
*2 プログラム上の調整値“0.9f”などは、数学でいう実数(連続量)に相当し、細かな小数で計算するための拡張された表現方法ですが、これもマイコン内部で扱う以上、厳密にはデジタル値(離散量)です。
2. 今月の課題
<スタートアップ(全コース)>
特にありません
<プライマリーコース>
- オリジナル図形プリント
<ベーシックコース>
- オリジナル課題プリント(3面図+設問)
- 上記授業内容を精読する(概ね3年生以上/低学年は補助の下で)
<ミドルコース>
- オリジナル課題プリント(3面図+設問)
- 上記授業内容を精読する
<アドバンスプログラミングコース>
- 上記授業内容に紹介した動画(YouTube)を視聴する
<プロ1年目コース>
- 上記授業内容を精読する(該当テキストページを見ながら)
3. 今後の授業スケジュール
◆中間5/11は『中間市生涯学習センター』で開催します。
◆小倉北7月よりベーシック/プライマリ10:30~とさせて頂きます。
――――――――――【佐藤教室長】――――――――――
[東福間]第1・3土原則<学習ルームでこぼこ>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドプロ
⇒ 5/4, 18, 6/1, 15, 7/6, 20
[中間]第2・4土原則<なかまハーモニーホール>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドプロ
⇒5/11※第1回 中間市生涯学習センター2F第4研修室
5/25 第2回 なかまハーモニーホール2F会議室1
6/8, 22, 7/13, 27
※5/11は代替施設『中間市生涯学習センター』で開催します。
[小倉北]第1・3日原則<ムーブ>
- 10:00~ ベーシック/プライマリ(7月より10:30~)
- 13:00~ ミドル
- 15:00~ アドプロ/ロボプロ1年目
⇒5/ 5 第1回 5F小セミ
5/19 第2回 4F和室・工芸室
6/2, 16, 7/7※, 21※
※7月はムーブフェスタの為、6/2まで確定できません。代理施設での開催となる可能性があります。
――――――――――【中野教室長】――――――――――
[八幡東]第1・3土原則<レインボープラザ4F>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドプロ
⇒ 5/4, 18, 6/1, 15, 7/6, 20
[小倉南]第2・4日原則<総合農事センター2F>
- 10:30~ ベーシック/プライマリ
- 13:00~ ミドル/アドプロ(/ロボプロ1年目)
⇒ 5/12, 26, 6/9, 23, 7/14, 28
4. お知らせ
1) 小倉北ベーシック/プライマリ時間シフト7月よりベーシック/プライマリ時間を30分遅らせ、10:30~12:00とさせて頂きます。
背景としまして、北九州市財政と市営施設の老朽化に因る室料の大幅値上げ、昼休み時間の圧縮効率化があります。
何卒ご理解・ご協力お願い申し上げます。
2) 8月~新ミドルコース(プログラミング対応)へリニューアル[再掲]
ミドルコースがアドプロコース用のマイコン・センサー類を一部下ろす形で、8月~タブレットを用いた簡易プログラミングに対応します。
【キット代(税別)ご負担の流れ】
~7月:入会時2.85万円→アドプロ進級時2.7万円
8月~:入会時2.85万円→ミドル進級時1.8万円→アドプロ進級時0.9万円
従来ミドル内容をベースとした改編ですので、進級タイミングに関わらず、新旧ミドル合わせて18ヶ月満期の履修が原則となります。
8月時点でミドル継続中の方は、残り期間に応じて、新旧コースの選択肢を提供いたします。詳細は対象の方へ個別にご案内して参ります。
http://robocobo.sakura.ne.jp/blog/0227_newmiddle.pdf
3) 5月景品交換会
3ヶ月毎の宿題ポイント交換会を5月「第2回」授業時間「前」に開催します。
ポイントカードを忘れずに、早めに来て下さい。
4) 3月課題 高得点者 []内は教室と学年
◆プライマリ【7名平均 図形3.1】
5点…田中[八幡東 年長], 柴田(直)[小倉北1], 末吉[小倉北 年長]
◆ベーシック【23名平均 図面2.3+設問2.7=5.0】
10点…なし
9点…柴田[小倉北3], 林田[小倉南1]
8点…中村[東福間3], 下木[八幡東3], 柴田(大)[小倉北1], 橋本[小倉南1]
◆ミドル【18名平均 図面2.7+設問1.2=3.8】
10点…なし
9点…なし
8点…宮尾[八幡東5]
7点…大和(彩)[小倉北4]
6点…樋口[八幡東4]
◆アドバンスプログラミング【6名平均 図面8.5+設問5.8=14.3】
20点…山本[中間6]
17点…橋本[小倉南4]
16点…田中[東福間6]
東福間・中間・小倉北教室 佐藤 / 八幡東・小倉南教室 中野