2.今月の課題
3.今後の授業スケジュール
4.お知らせ
1. 10月授業内容
1.0 <スタートアップ(全コース)>
割愛します。

1.1 <プライマリーコース『SLロボロコ』>
割愛します。
1.2 <ベーシックコース『ロボート』>

ロボ・ボートの略(りゃく)ですね。ネーミングもさることながら、オールをこぐ動きもナイスです。
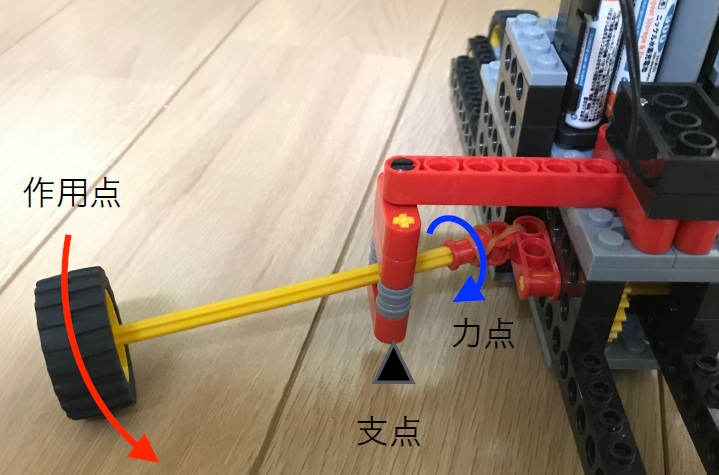
この動きは、棒の中央付近(支点)をあまり動かないように固定し、一端(力点)をこぐように回すと、他端(作用点)も同様に回る性質を利用しています。

ただし、支点の位置によって、作用点の動きを大きく(速く)したり、代わりに働く力を大きくしたり、自在に調整できます。
大事なことは、速さと力の両方を増やすことはできず、どちらか欲しい方を好きなだけ増やせる(*1)ということです。
これを『てこの原理』といいます。
支点が真ん中にあれば、力も速さも変わらず、力点と作用点が対等に“闘う”ことができます(*2)。
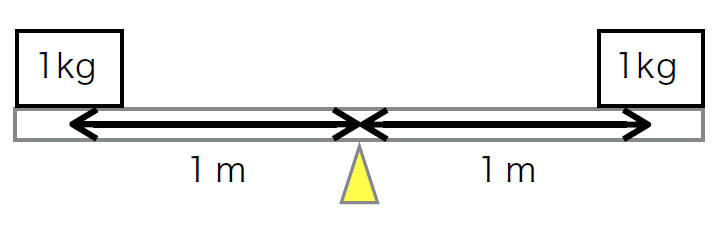
天びんや公園のシーソーは、力点と作用点(区別は不要)に同じくらいの重さの物や人をのせて、バランスを取るものです。
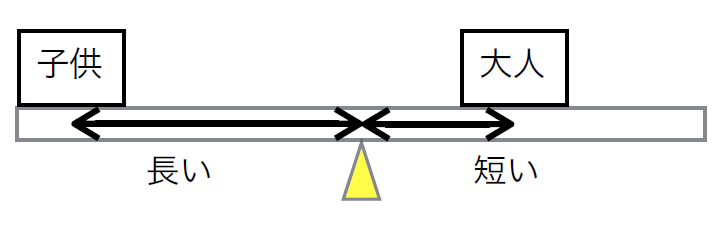
重さの異なるもの同士なら、重い方が支点の近くに寄ることでバランスが取れます。
シーソーでは、大人が中央寄りに座りますよね。
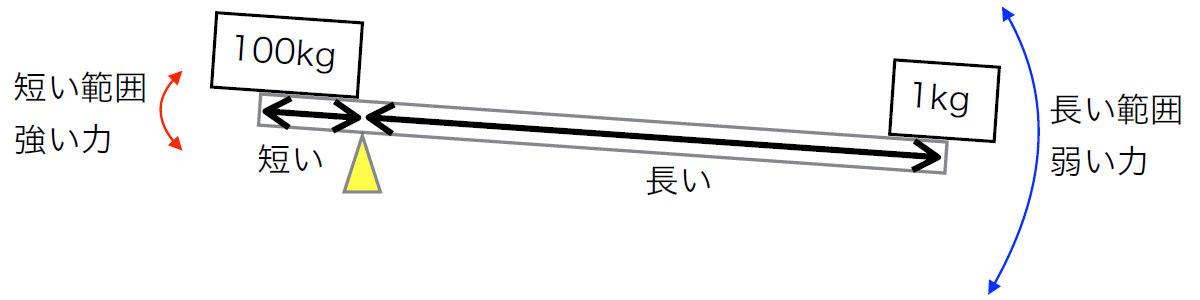
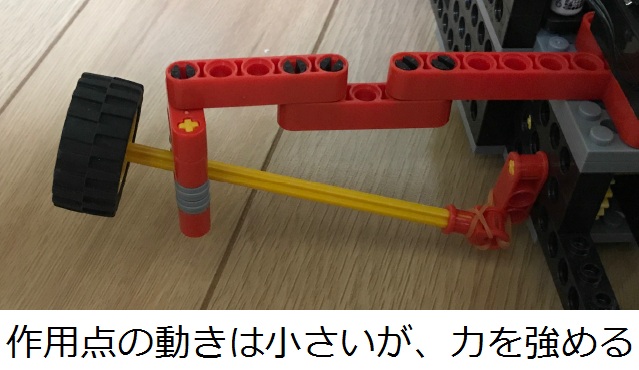
支点が作用点の方に近ければ、力点を大きく動かさないといけない代わりに、力点に加えた力よりも大きな力が作用点に働きます。
『てこの原理』と言えば、通常はこちらの利用方法を指し、ペンチや枝切りばさみ、缶切り、せん抜きなど、固いものを切ったり動かしたりする道具に利用されています。
逆に、支点が力点の方に近ければ、力点に大きな力が必要になる(重く感じるようになる)代わりに、作用点を大きく(速く)動かすことができます。
ボートをこぐオールはこちらの利用方法で、結構大きな力が要(い)る代わりに、一こぎですーっと進むことができます。
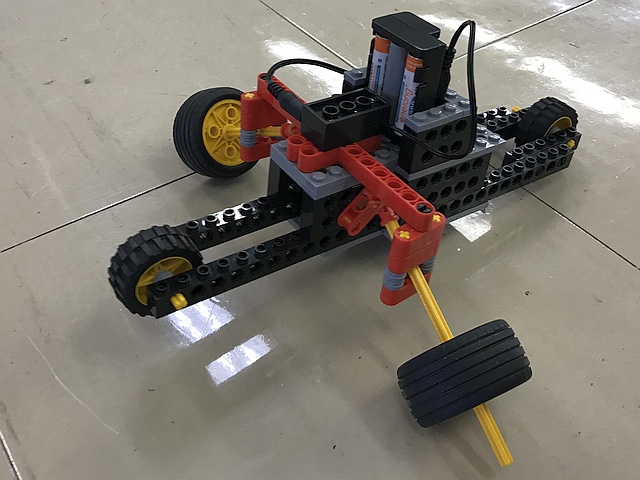
『ロボート』でも同じです。オール(シャフト)の先を延長して速く進ませることもできますが、あまり欲張(よくば)っても、モーターの負担(ふたん)が増えるので逆効果でした。
オール(シャフト)の根元は、輪ゴムでクランク(*3)の先と結び、人間の手のように柔(やわ)らかく“水面”をこぐ設計もうまいです。


2日目の最後に、ボートレースでスピードを競いました。
一見どれも同じような動きに見えて、いざ地面(水面?)に放つと、速さには3~4倍以上の開きがありました。
下記の点に注意したロボートが速かったようです。
●手で押した勢い(惰性=だせい)でもスムーズに進むこと
(前後のタイヤSを手で回して、ブレーキがかかったように固くないこと)
●しっかりした輪ゴムでオールを留(と)める
(伸びきった輪ゴムでは何回転もねじれて先端のタイヤSに力が入らない)
●あまり欲張って、オールを長くし過ぎたり、先端をタイヤLに替(か)えたりしない
(てこの原理により、モーターが力負けして速く回せない)
*1 例えば、力を倍に増やして得をすれば、速さが半分に減って損をします。世の中、うまくできていますね。
*2 物体が静止している時、重力が働いている地球上では必ず、何か2つ以上の力が対立しながらバランスを取っています。
*3 実際に使用している部品は『クランク』ではなく『クロスジョイント』ですが、クランクと同じ作用を働かせています。
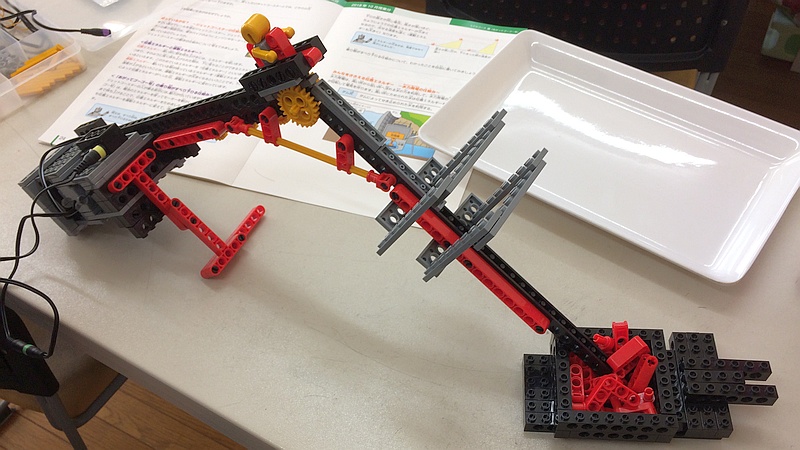
1.3 <ミドルコース『あがってゴーゴー号』>
ジェットコースターです。

必要な動力は、コースター(乗り物)を頂上まで持ち上げることのみです。あとは“下り”だけですね。
コースターを引き上げる方式として、主流なのは、地上と頂上の間を周回する長いチェーンにコースター下部のツメを引っ掛ける方式ですが、
過激なものは、圧縮空気やリニアモーターで平地から一気に加速させ、惰性(だせい)で昇らせてしまいます。(乗ってみたい…)
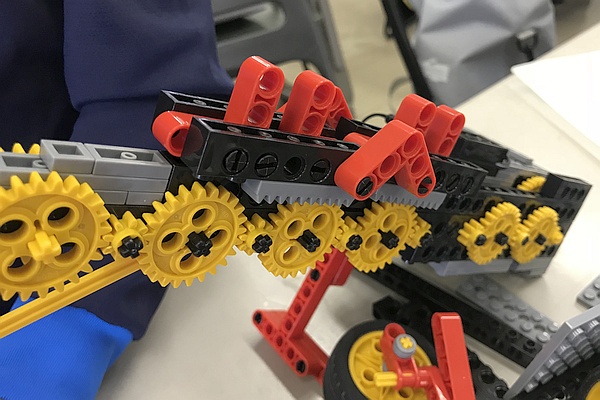
今回は、コースター下部のラックギアが、一列に並んで回転するギアMの上部と噛み合い、昇っていきます。
一連のギアMをチェーンと見立てれば、主流の方式に似ていますね。
1日目は、傾斜したレール上を頂上まで昇らせるところまでです。
重要ポイントは、
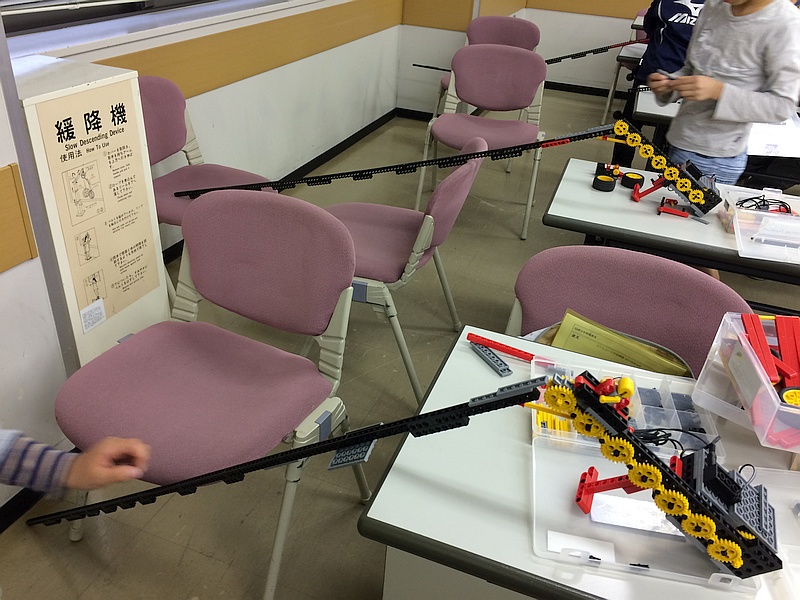
1) ラックギアと噛み合うギアMはすべて、
2) 同じ速さで、
3) 同じ方向に、
回転させることです。
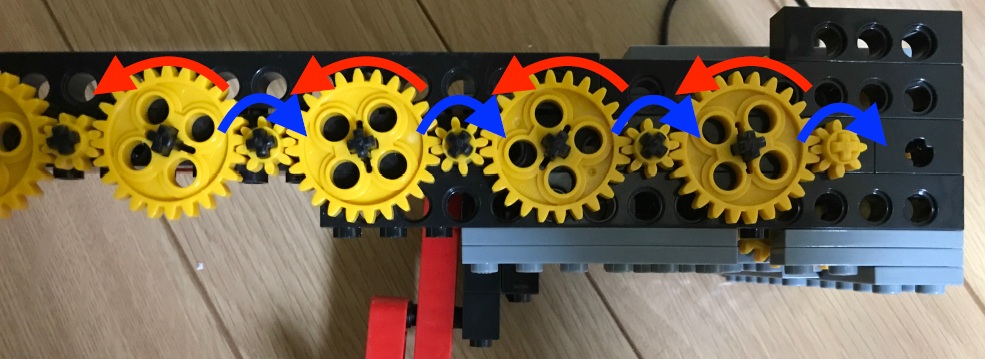
なぜ、直径の異なるギアMとピニオンギアを交互(こうご)に噛み合わせているのか?
だって、隣(とな)り合うギア同士は逆回転する宿命にありますからね。
逆回転するピニオンギアとラックギアを接触させるわけにはいきません。

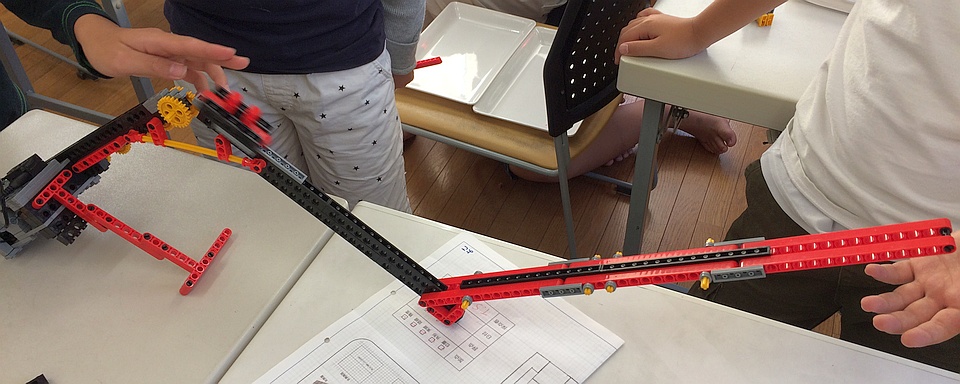
2日目は、下りのレールを付け足しました。
乗り物としては、これこそが醍醐味(だいごみ)ですものね!
小さい部品を駆使して、頂上部を滑(なめ)らかに形成します。
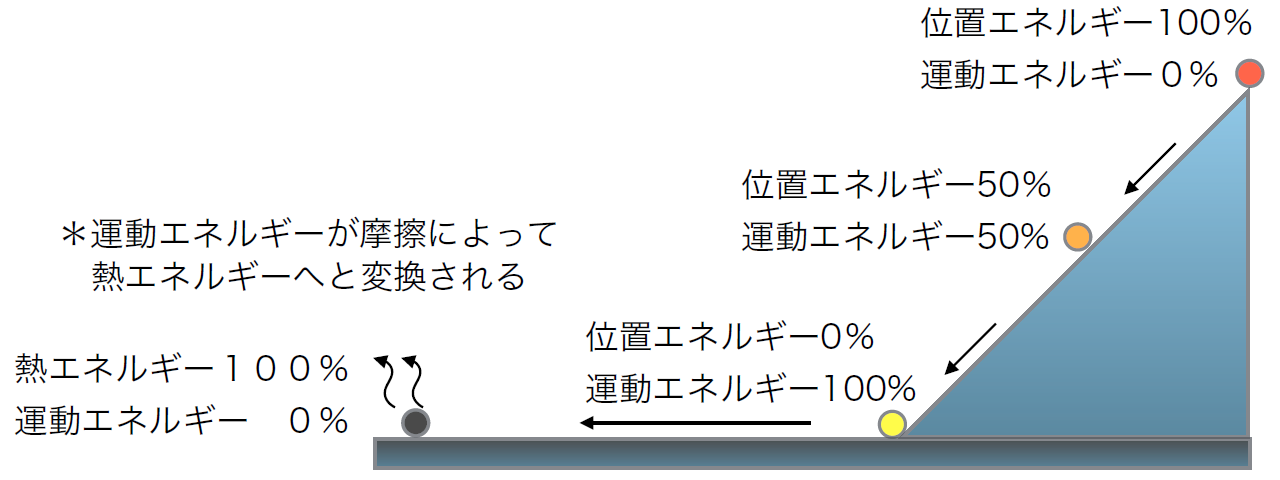
下りながらスピードが増すのは、物理学的に言えば、頂上で満タンになった位置エネルギー(高さ)が、下るにつれて運動エネルギー(速さ)に変わっていくからです。
最下点では位置エネルギーが最小、運動エネルギーが最大です。
その後、机の上をしばらく滑走し、摩擦で机とコースターを僅(わず)かに暖めながら止まります。
位置エネルギー ⇒ 運動エネルギー ⇒ 熱エネルギー へと変換されました。
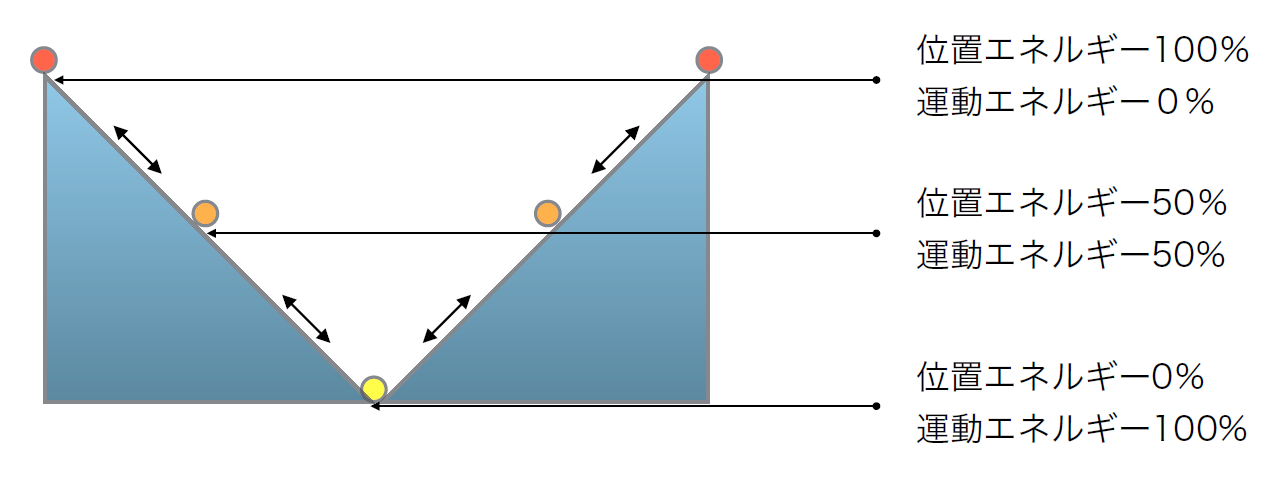
実際のコースターでは、何度か上昇と下降を繰り返す中で、位置エネルギーと運動エネルギーの交換が起こりますが、その和は(摩擦損失を無視すれば)常に一定であるというのが、中学3年理科で習う『エネルギー保存則』です。
振り子やブランコが高さと速さを交換しながら運動を続けるのも同じ原理です。
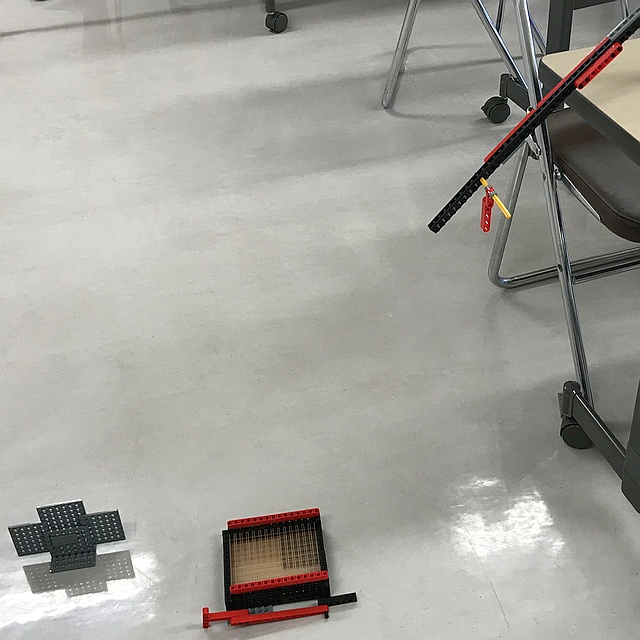

授業の最後に、コースターに人形パーツを乗せて無事に下ることができるか、安全性を至上命令に、スリリングなコースを建設してもらいました。
地上(机上)の高さ以下、奈落の底へと続く下りレールを延長した改造例もありましたが、果たして乗員の運命や如何に。
1.4 <アドバンスプログラミングコース『カメラボ(1)』>
撮影ロボット『カメラボ』では、タブレットのカメラ機能を使います。

カメラ起動中に音量ボタンを押すことでもシャッターをきれますので、プログラムからシャッターを操作できるようロボットを作りました。
モータ軸に取り付けたロッド3アナを一瞬回して、音量ボタンに当てるだけで写真が撮れます。
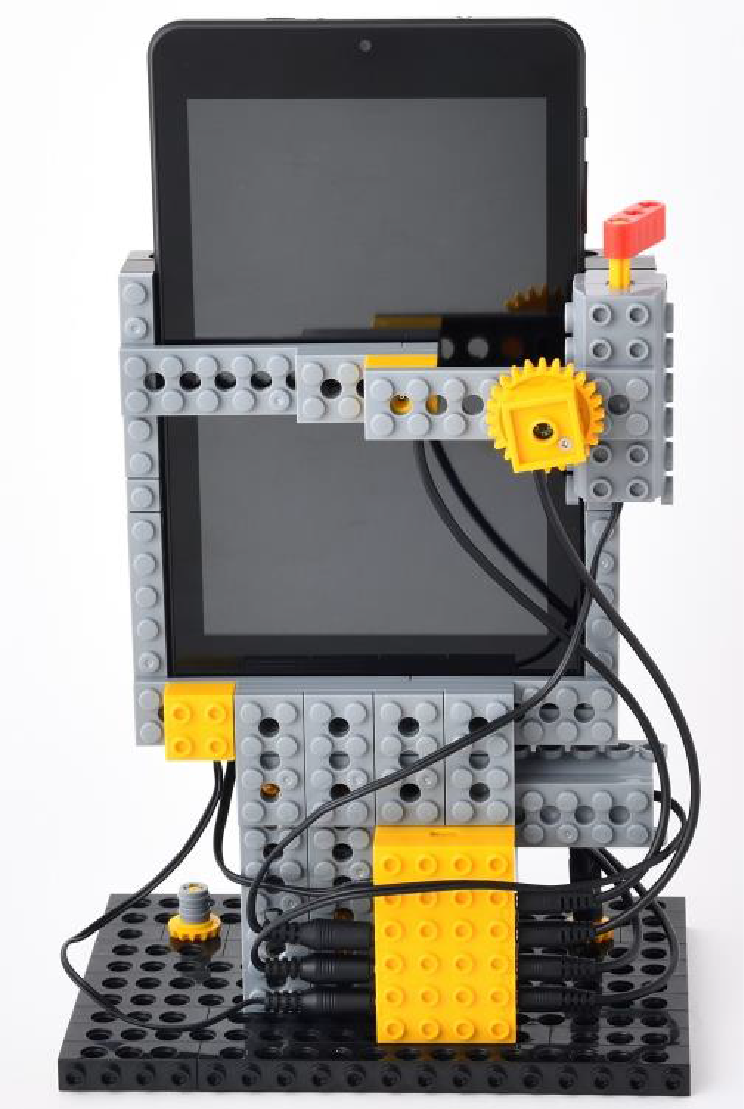
カメラボを2日目まで組み立て、首振り機能や音センサー、光センサーを追加しました。
センサーを用いることで、時間経過以外のきっかけ(トリガー)で写真を撮影することができます。
首振り機能を活用すれば、カメラの視角範囲外の撮影も可能です。
プログラムとセンサーの組み合わせ次第で、いろいろな使い方が考えられます。
光センサーや音センサーからの情報を使い、周囲の異変を検知する防犯カメラ。
首振り機能を活かし、部屋をぐるりと360°撮影できる監視カメラ。
定点撮影を一定間隔で行い、小さな変化を早送りすることで大きな変化として見ることのできるタイムラプスなどがあります。
このタイムラプスは、普段は見過ごしがちなスローな変化を改めて教えてくれますので、いろいろな対象物を撮影してみてください。
YouTubeなどで面白い動画に慣れきった皆さんに、タイムラプスの楽しさを伝えるために以下の動画作品を作ってみました!
【マジカル・ルイボスティー】
http://robocobo.sakura.ne.jp/blog/robot/adv1-1810-1.mov
コップにお茶を少しずつ注ぎ足しては撮影します。
この連続写真をつなげると、コップのお茶が勝手に増えていく不思議な動画になります。
【忍び寄る影】 - 15秒おきに撮影
http://robocobo.sakura.ne.jp/blog/robot/adv1-1810-2.mov
陽が射し込む部屋の様子を撮影したものです。影がだんだんと伸びていく様子が見て取れます。
タイムラプス撮影によって時間を早回しでき、普段は気づかない小さな変化を大きな変化として確認できます。
【キャッツ】 - 15秒おきに撮影
http://robocobo.sakura.ne.jp/blog/robot/adv1-1810-3.mov

お家にペットがいるなら、撮影対象にすると新たな発見があるかもしれません。
この動画からは、キジ猫ちゃんはよく動くけど、黒猫ちゃんはほとんど寝てることが分かりますね。
【マイ・ドライブレコーダー】 - 3秒おきに撮影
http://robocobo.sakura.ne.jp/blog/robot/adv1-1810-4.mov

カメラボを車のダッシュボードに据え付け、車窓を連続撮影しました。
実際には20分ほど時間が経過してますが、15秒ほどにギュッと縮められました。
道順も分かるため、道案内動画などに応用できそうですね。
【フル・ムーン】 - 15秒おきに撮影
http://robocobo.sakura.ne.jp/blog/robot/adv1-1810-5.mov

定番の天体撮影です。アドプロのタブレットでは星の撮影は難しいので、月を狙いました。
カメラを東の夜空に向けてセットし、20時頃から1時間ほど連続撮影を行います。
月が昇っていく様子がよく分かりますね。
あまり月を長時間眺める機会などありませんから、興味深い動画となりました。
この他にも、タイムラプスを利用してトリック撮影(現実世界ではありえない変化)も行えます。
http://robocobo.sakura.ne.jp/blog/robot/adv1-1810-6.gif
一昔前だと、写真を撮るためのコストが高く、このような遊びはできませんでした。
デジカメがプログラムやアプリから制御できるようになり、誰もがこのような撮影を楽しめるようになりました。
アイデア次第では、100万回再生を突破する動画アップも難しくないでしょう!?
ロボット本体の設計にこだわるのも良いですが、今回は映像作品に制作力を注いでみてはいかがでしょうか。
1.5 <プロ1年目コース『リンクロボット(1)』>
Autumn(秋)タームとして、多脚リンクロボットを製作し、プログラム制御するまでの3ヶ月が始まりました。
脚がうにょうにょ動き、にょろにょろ走り回る姿態を空想して、否応無しに期待感が高まります。

1ヶ月目は、2本1組の脚リンクから組み立てていきます。
1組2本の脚だけでも、うねうねと有機的な動きを見せます。
これが6組12本も組み合わさるとなれば、それは壮麗なのか、不気味なのか、いずれにせよ楽しみです。
図面や説明文の読解、パーツの向きや重ねる順番の照合、ネジやナット締め等、単体でも苦労する脚リンクを複雑に組み合わせるのですから、
空間認知、合理的思考、工作的センス(力加減、器用さ)に始まる、あらゆる能力を総動員して完成せねばなりません。
過去にも、大半の生徒さんが授業時間内には終わらず、家庭で進めて完成しても動かないか、動きがギクシャクしたり、自己分解してしまったり…。組み立てミスも続出するような代物です。
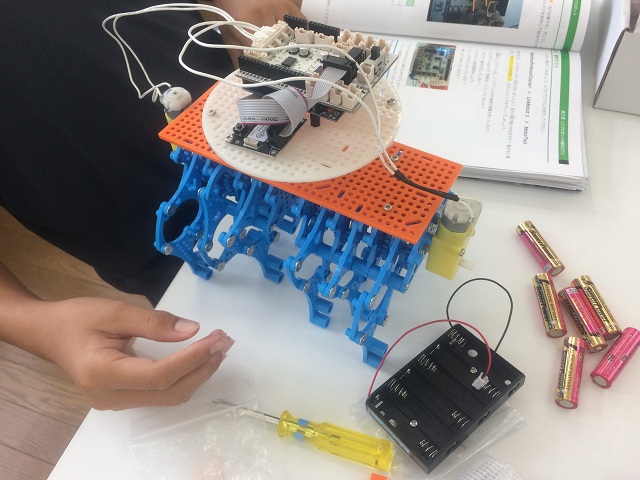
2日目は、マイコンボードや無線モジュールを搭載し、モーターを回して脚の動きをチェックするところですが…
手順を誤った脚の組み直しに迫られ、ほぼ間に合ってませんね。
完成すると、苦労の甲斐あって、その動きは有機的というか、節足動物的というか、初めて目にする者をゾッとさせる異様さがあります。
非日常性を奏するには十分過ぎるインパクトです。
次月では、コントローラーとプログラムを使って、思い通りにロボットを操縦します。
2. 今月の課題
<スタートアップ(全コース)>
特にありません
<プライマリーコース>
- オリジナル図形プリント
<ベーシックコース>
- オリジナル課題プリント(3面図+設問)
- 上記授業内容を精読する(概ね3年生以上/低学年は補助の下で)
<ミドルコース>
- オリジナル課題プリント(3面図+設問)
- 上記授業内容を精読する
<アドバンスプログラミングコース>
- 上記授業内容を精読する
<プロ1年目コース>
- ロボット製作を完了する
3. 今後の授業スケジュール
◆八幡東11/3→11/10へ一週ずれます。
――――――――――【佐藤教室長】――――――――――
[東福間]第1・3土原則
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドプロ
⇒ 11/3<景品交換会>, 17, 12/1, 15, 1/5, 19
[東福間プロ]
- 11/11 10:30~11:30 卒業制作 発表会
[中間]第2・4土原則<なかまハーモニーホール>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドプロ
⇒11/10 第1回 3F会議室2<景品交換会>
11/24 第2回 3F会議室2
12/8, 22, 1/12, 26※
※1/26はハーモニーホール利用不可の為、代替施設(未定)で開催します。
[小倉北]第1・3日原則<ムーブ>
- 10:00~ ベーシック/プライマリ
- 13:00~ ミドル
- 15:00~ アドプロ/ロボプロ1年目
⇒11/ 4 第1回 5F小セミ<景品交換会>
11/18 第2回 5F大セミ
12/2, 16, 1/6, 20
――――――――――【菅本教室長】――――――――――
[とばた]第2・4土原則<ウェルとばた8F>
- 13:00~ 全コース(プロを除く)
⇒ 11/10, 24, 12/8, 22, 1/12, 26
――――――――――【中野教室長】――――――――――
[八幡東]第1・3土原則<レインボープラザ4F>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドプロ
⇒ 11/10※<景品交換会>, 17, 12/1, 15, 1/5, 19
※11/3はレインボープラザ利用不可の為、一週ずらします。
[小倉南]第2・4日原則<総合農事センター2F>
- 10:30~ ベーシック/プライマリ
- 13:00~ ミドル /アドプロ
⇒ 11/11<景品交換会>, 25, 12/9, 23, 1/13, 27
4. お知らせ
1) IchigoJamマイコンプログラミング(+はんだ付け)講座 リピート開催!
10/8(月・祝)ムーブ4F工芸室にて、AMはんだ付け12組、PMプログラミング14組の方に参加頂きました。
中級レベルの難易度で心配していたはんだ付けは、一部でリカバリ作業を要したものの、概ね順調に完成しました。
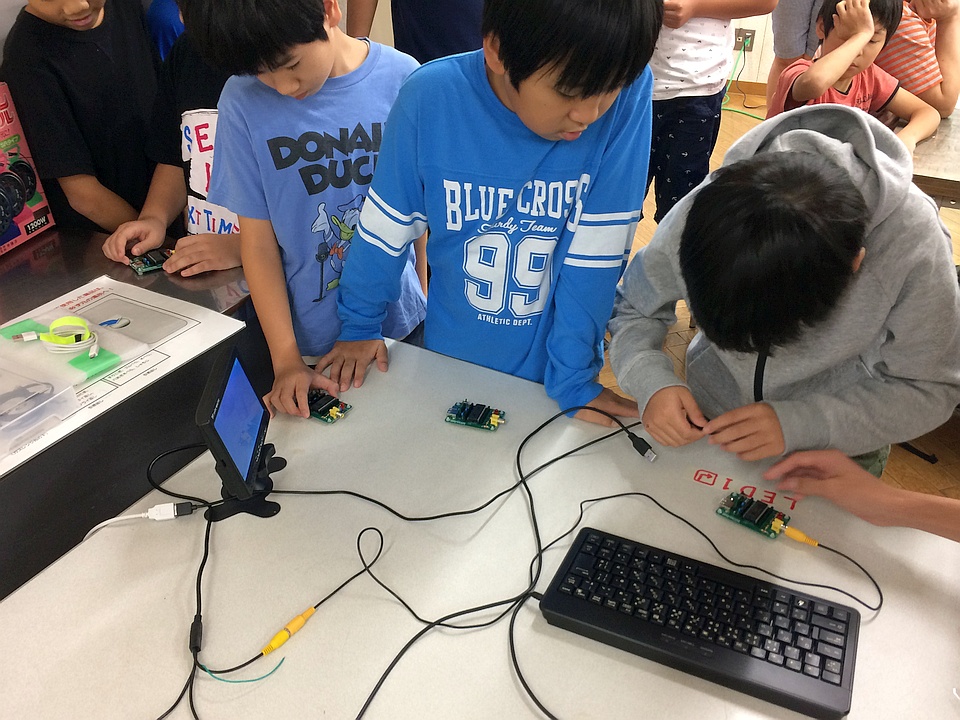
プログラミング編では、キーボードを使ったコマンド入力インタフェース(BASICインタプリタ)に戸惑う場面もありましたが、
短い命令で動作し、少ない行数でそこそこのゲームが作れてしまうことが面白かったようです。

次回12/24(月・祝) 北九州パレスでの初級ステップアップ講座をお楽しみに。
(詳細は来月報でご案内します)
その前に、本スタートアップ講座をリピート開催いたします。
10/8ご参加になれなかった方、ご興味のある方はご検討下さい。
http://robocobo.sakura.ne.jp/blog/lab/IchigoSU2018-2.pdf
【講座名】
A) IchigoJamマイコンボードはんだ付け(中級)
B) IchigoJamスタートアップ ~初めてのゲームプログラミング~
【内容】
A) 自分だけのIchigoJamパソコンを自分で作っちゃいます
B) IchigoJamでゲームをプログラミングしながら、BASIC言語の基礎に触れます
【講師】中野・佐藤
【会場】北九州市立男女共同参画センター(ムーブ)5F
【日時】A) 11/18(日) 10:00~12:15
B) 12/ 2(日) 10:00~12:15
【対象】下記の小4~中学生 5名(保護者同伴可)
A) 昨年11/23はんだ付け受講者、経験者、根気ある初心者
B) 大文字アルファベットA~Zが読める
【必須費用】
△A)のみ 5,940円(受講料3,780円+自作キット代2,160円)
B)のみ 7,020円(受講料4,320円+完成キット代2,700円)
A)+B) 10,260円(受講料8,100円+自作キット代2,160円)
△IchigoJam経験者向け(一般には非推奨)
【オプション費用】
A-0) はんだ、吸取り線、こて台、破損部品代(実費)
A-1) はんだごて/吸取り線/スポンジ付こて台セット1,620円(持込可)
A-2) はんだごてセット レンタル 810円
<注意>持込品が作業に適さない場合は購入orレンタル頂きます
B-1) 7インチモニター 3,780円(自宅用/テレビでも可)
B-2) PS/2対応USBキーボード1,350円(自宅用/不明な場合は推奨)
【申込方法】下記を選択の上メールにてお申込み下さい。11/11〆切・先着順です。
<受講コース>
A)のみ B)のみ A)+B)
<希望オプション>
当日変更できますので予定をお伝え下さい
A-1) はんだごてセット購入 B-1) 7インチモニター
A-2) はんだごてセットレンタル B-2) キーボード
【申込条件】
- はんだごてセット持込品が作業に適さない(不足を含む)と判断した場合は、講座指定品を購入orレンタル頂きます。
- 半田ごては熱器具です。扱いを誤ると火傷・火災の恐れがあります。
ご家庭での取り扱いルールをお決め下さい。
- 原則として、12月お引落し額(1月分)に加算して徴収させて頂きます。
11/11~キャンセル・欠席により空席が発生した場合は返金できません。
(キットと製作テキストのみお渡しします/オプション品は任意)
2) 11月景品交換会
宿題ポイントを貯めてくれてました生徒さんには長らく申し訳ないことに
先送りになっておりました宿題ポイント交換会を11月第1回授業時間「前」に開催します。ポイントカードを忘れずに、早めに来て下さい。
3) 9月課題 高得点者 []内は教室と学年
◆プライマリ【4名平均 図形4.8】
5点…川田[小倉北 年長], 柴田[小倉北1], 末吉[小倉北 年長]
◆ベーシック【19名平均 図面6.2】
10点…下木[八幡東3], 柴田[小倉北3], 橋本[小倉南1]
9点…筋田[東福間3], 中村[東福間3], 井窪[中間6]
8点…藤野[八幡東3]
◆ミドル【22名平均 図面3.0+設問1.3=4.2】
10点…なし
9点…なし
8点…原[小倉南5]
7点…なし
6点…川村[中間5], 谷川[八幡東5], 荒木[小倉北4]
◆アドバンスプログラミング【4名平均 図面5.8+設問4.7=10.4】
最高18点…山本[中間6]
東福間・中間・小倉北教室 佐藤 / 八幡東・小倉南教室 中野