2.今月の課題
3.今後の授業スケジュール
4.お知らせ
1. 7月授業内容
1.0 <スタートアップ(全コース)>
割愛します。
1.1 <プライマリーコース『ウッシーくん』>
割愛します。
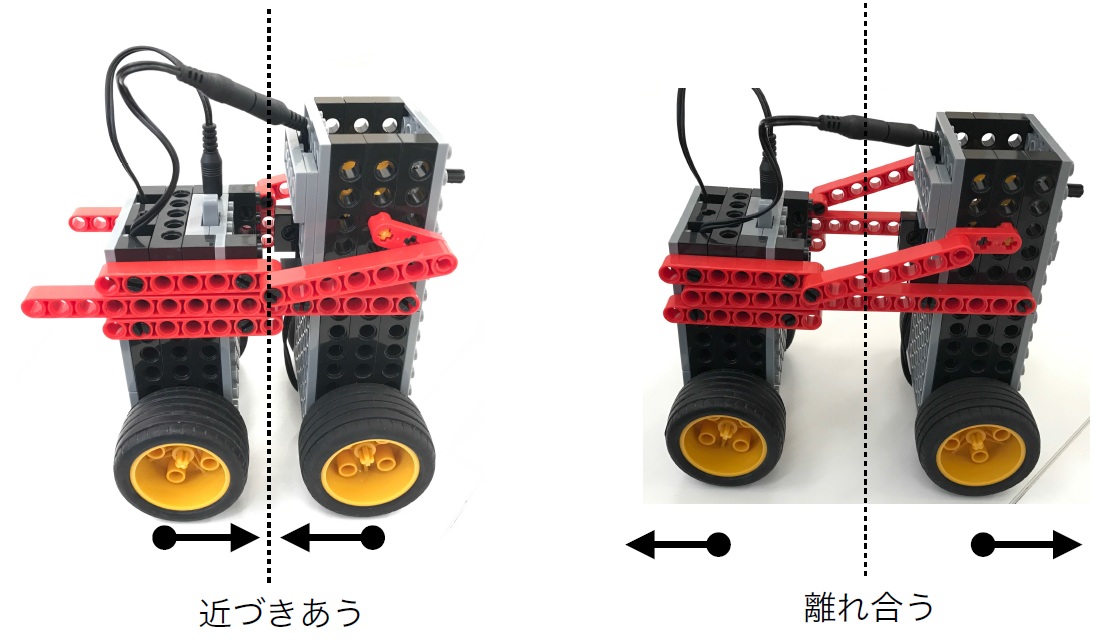
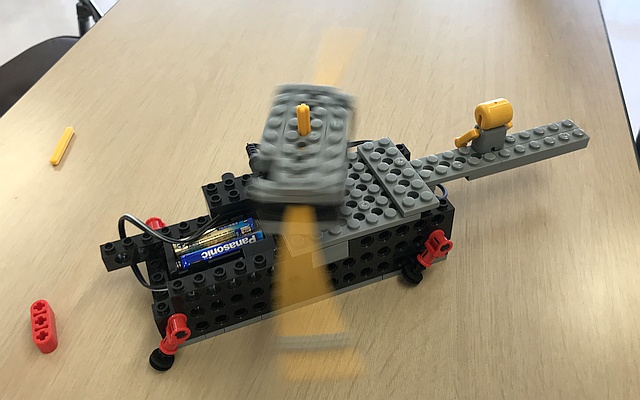
1.2 <ベーシックコース『親子マーチ』>
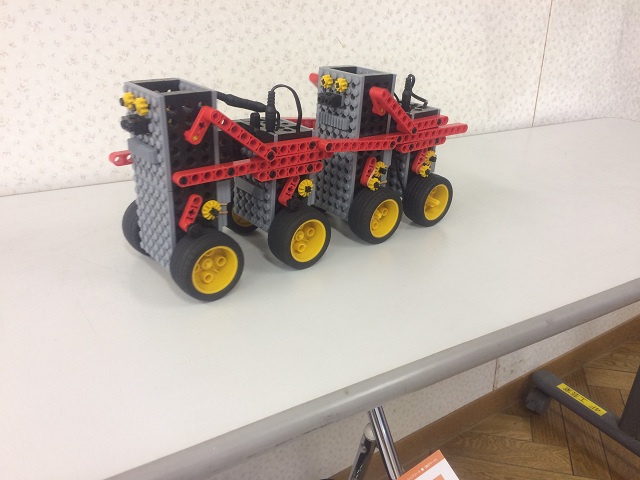
親(前輪)と子(後輪)がタンデムを組んだ4輪車ロボットには違いありませんが、モーターはタイヤを一切(いっさい)回しません。
モーターの仕事は、親の腕(クランク)を回すことで子を引き寄せたり遠ざけたりするだけです。

とは言え、親とて足は自由回転するタイヤ。親子とも前後しながら、付かず離れずを繰り返すだけで全体としては進まず、下手(へた)な二人三脚のようで滑稽(こっけい)です。
1日目はここまで。
さて、この親子をうまく前進させる仕掛(しか)けが何か必要です。
進まない親子ロボットを観察すると、腕の伸縮(しんしゅく)運動(*1)に合わせて、タイヤが前へ後ろへ交互(こうご)に回っており、移動量は差し引きゼロです。
このタイヤを、「前方向へは回るが後ろ方向へは回らない」ようにできれば、もはや進む他(ほか)に道はありませんよね!
知る人ぞ知る、「ラチェット機構(きこう)による回転方向の制限(せいげん)」です。
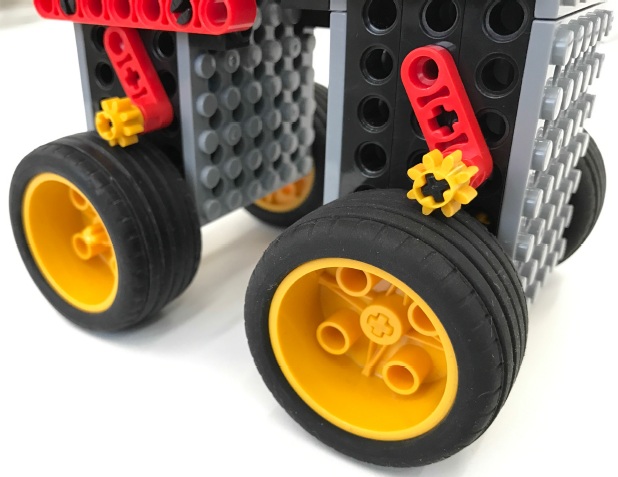
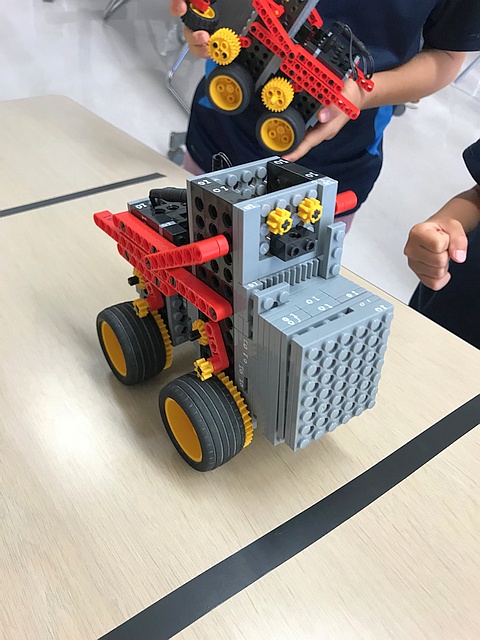
2日目テキストの通り、タイヤの逆回転を阻止(そし)するストッパーを当てただけで、「前輪を止めて後輪を進め、後輪を止めて前輪を進める」動作を繰り返すようになり、今までが嘘(うそ)のようにテンポよく進めるようになりました。
二人三脚というより、尺取虫(しゃくとりむし)の要領(ようりょう)ですね。
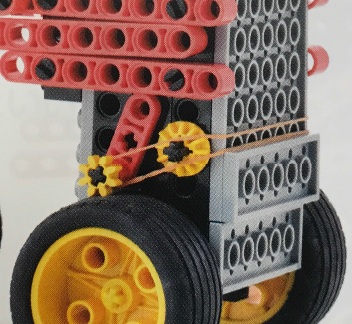
輪ゴムでストッパーの押し付け力を調整します。
あまりに強く押し当て、前方向にも回りにくくなった失敗例もありましたが、軽く当てるだけで、10°くらいの急な坂道すら、ずり下がらずに上れるようになりました。
回転を一方向に制限するだけの仕掛けが、こんなにも有用なのですね(*2)。
テキストに頼らず、独自のすばらしい発明の数々も生まれていました。
授業最後の競技は、上り坂チャレンジ!
長机を下記のレベルに傾け、ラチェット(ストッパー)の実装アイデアと性能を競います。
・レベル1 … 約10°;成功率70%の普通レベル
・レベル2 … 約15°;成功率30%のハイレベル
・レベル3 … 約20°;成功率5%の達人レベル
・レベル神 … 約25°;成功率1%の神レベル!

坂を上るためには、まず、後ろにずり下がらないことが大事です。
ストッパーがちゃんとタイヤに当たるようになっていれば、ほぼレベル1クリアです。
ですが、あまりにストッパーを強くすると、前進の抵抗(ていこう)にもなります。
レベル2のきつい坂をクリアするには、ロボットを軽く手で押しても進むスムーズさが必要になります。
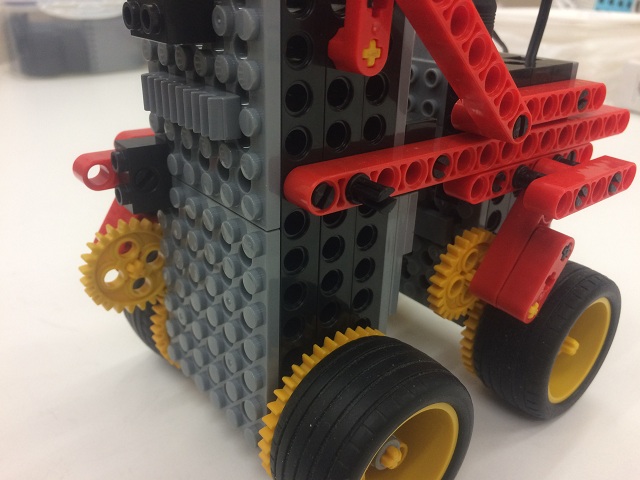
レベル3にもなると、重心が後ろの子ロボットに寄(よ)り、親ロボットのタイヤに掛(か)かる荷重(かじゅう)が軽くなって滑(すべ)ったり浮(う)いたりし、子ロボットを引き上げられなくなります。
こうなると、「親ロボットを重くする」のが思い付くアイデアですが、ロボット全体が重くなるのも上り坂には辛(つら)いですよねぇ。
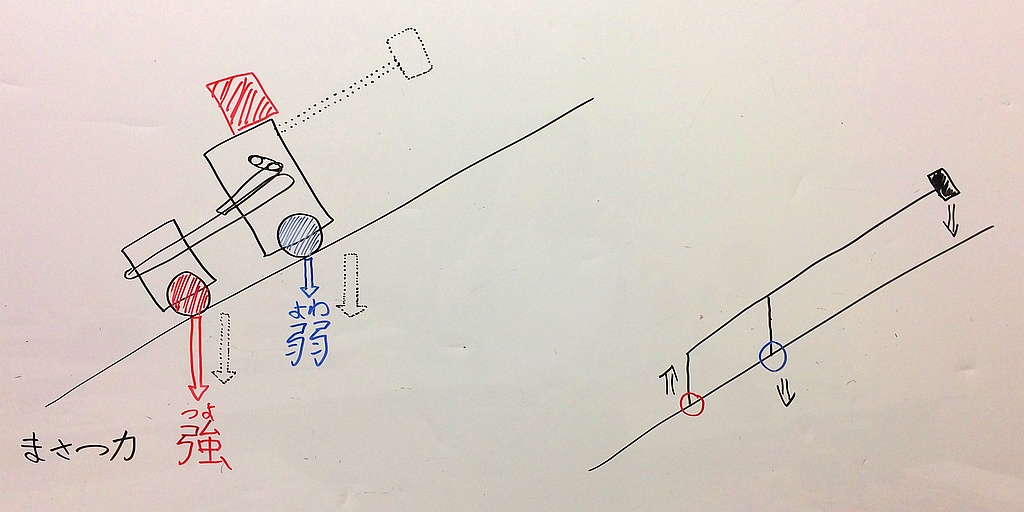


実は、『てこの原理』を応用すれば、「軽いおもりでタイヤに重い荷重を掛ける」なんて魔法も使えるのです。
親ロボットの鼻をピノキオみたいに長く伸ばして、その先に少しおもりを付けましょう。
25°くらいまで上れちゃいますよ。
*1 クランク機構を用いて、モーターからの回転運動を往復(おうふく)運動に変えて実現しています。
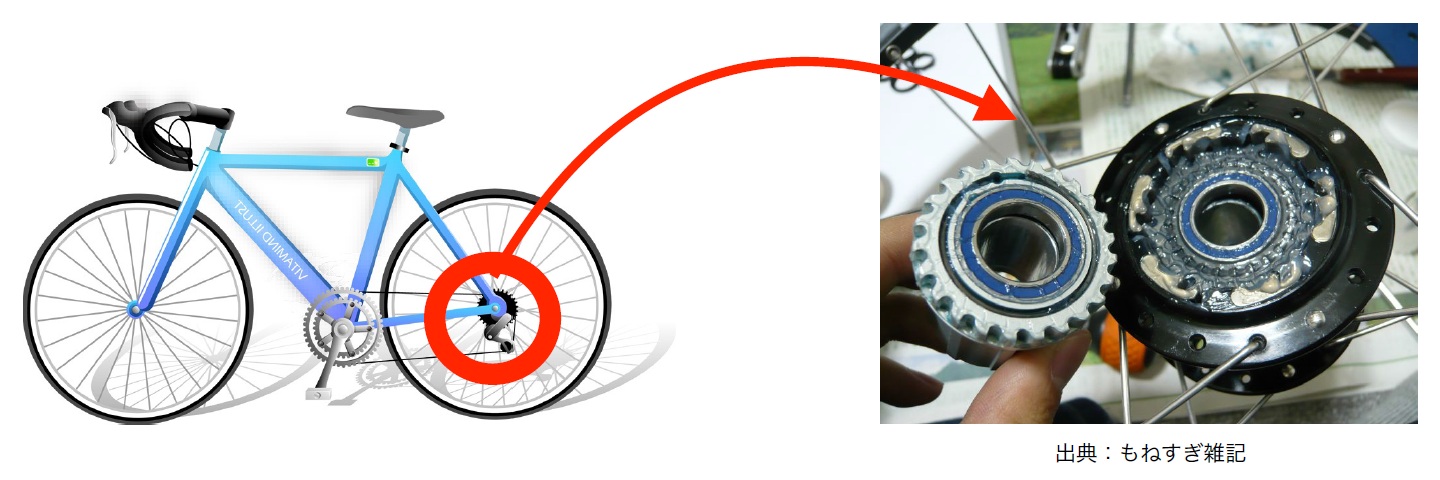
*2 自転車のペダル(正確には後輪のハブ内)にもラチェットが組み込まれています。
このおかげで、ペダルを休めても車輪は空回り(ペダルの逆回転に相当)することができます。
自転車の画期的な技術革新と言われています。
1.3 <ミドルコース『テケテケドリ』>
第5回アイデアコンテスト全国大会(2015年)ベーシックコース最優秀賞作品(小3)がベースの、ダチョウロボットです。
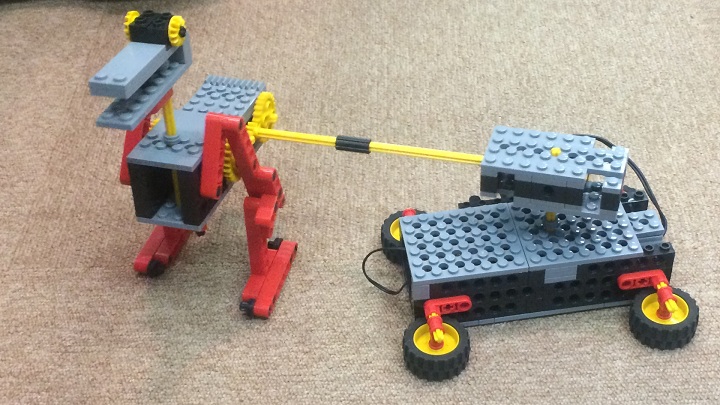
その静的デザインのみならず、足取りや首振りなどの動的アクションに設計センスの高さが光ります。
隙(すき)あらば余剰パーツで武器を製造する過激派の男子には受けないかもしれない、実に可愛らしいだけのロボットに見えますが、高橋智隆先生のお眼鏡に適(かな)い、ミドルコースに登場したのには訳があると考えるべきでしょう。
ダイナミックに動くダチョウ本体には、動力源のモーターが内蔵されておらず、回転する“長い”シャフトで動力を伝える点が斬新です。

このような動力伝達装置をドライブシャフト(またはプロペラシャフト)と呼び、世の産業機械ではよく使われています。
道路に目を向ければ、トラックやスポーツカーが、前部のエンジンから遠い後輪を回すのに利用しています(*1)。
二輪車(自転車・バイク)ではチェーンで後輪を駆動するのが普通ですが、ドライブシャフトを利用する例もあります。
ドライブシャフトを採用する最大のメリットは、可動部(車輪・脚)を、大きくて重たい動力源(エンジン・モーター)から切り離し、軽くコンパクトにできることです。
胴体の軽量化が、テケテケドリに軽快なステップを歩ませるのに貢献しています。
また逆に、テケテケドリの周回コースの中心に置く箱(土台)に、電池ボックスやモーターが内蔵され重くなることで、跳ね回るテケテケドリを駆動しながらも安定して支えることが可能になります(*2)。
こうして、2足歩行ロボットにとって肝心の、
・左右のバランスをとること
・軽く作ること
の双方を実現しながら、さらに動力エネルギーまで伝える“一石三鳥”の働きを1本のシャフトが担っているのです。すばらしい機能美です。

とは言え、戦車の砲塔(ほうとう)のように、土台の上でシャフトを振り回す旋回部(回転塔)の高さがテケテケドリと合わず、シャフトが水平でない場合は、躓(つまづ)きがちでしたね。
左右の脚に掛かる荷重のバランスが崩れたり、床材によっては、足裏のグロメット(ゴム)との摩擦力が過度に効いたりすることが原因です。
上手に歩む条件を探り出せば、かなり快調(怪鳥?)になります。

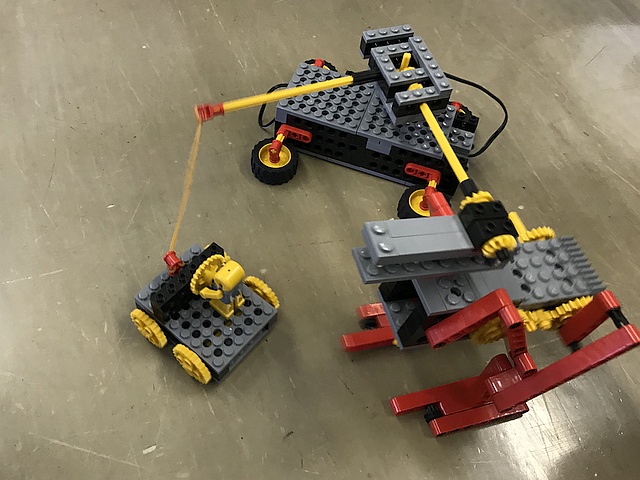
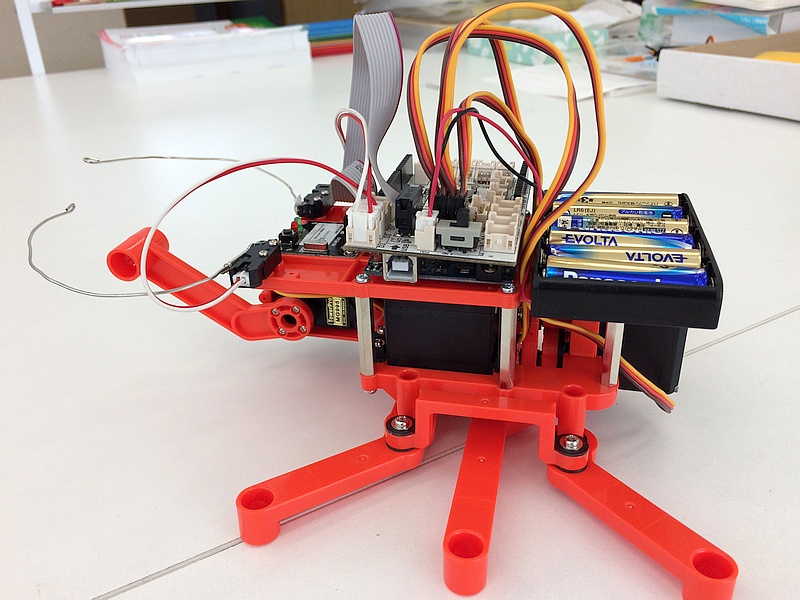
写真は、何ともメカメカしい、中野先生の渾身(こんしん)の改造作(2017年1月)です。
ドライブシャフトを等速ユニバーサルジョイントに変えて、テケテケドリの上下動を吸収し、多少の段差も乗り越えられるようにしました(*3)。
もっとも、ユニバーサルジョイントの自由度の高さが、左右に倒れないよう支える機能を失わせるため、回転塔とトリの背中を平行リンクで結び、上下動しても常に直立させています。
テキストのままでは、ノート1冊分の段差を上ろうにも、すぐに後ろにコケてしまいますが、これは数cmの凹凸も平気です。
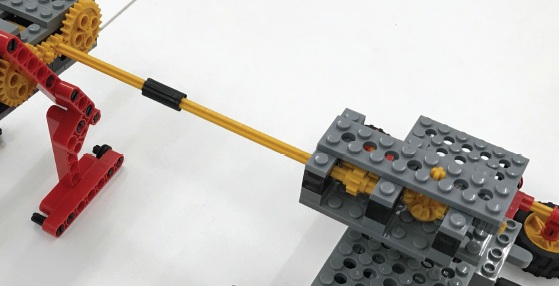
さて、ダチョウ側に目を惹(ひ)かれがちですが、中央の回転塔にも、普段あまり見かけない面白い機構が備わっています。
ドライブシャフトからダチョウを取り外して、スイッチを右(プラグと反対)側に入れると、回転塔が時計回りに勢いよく回転します。
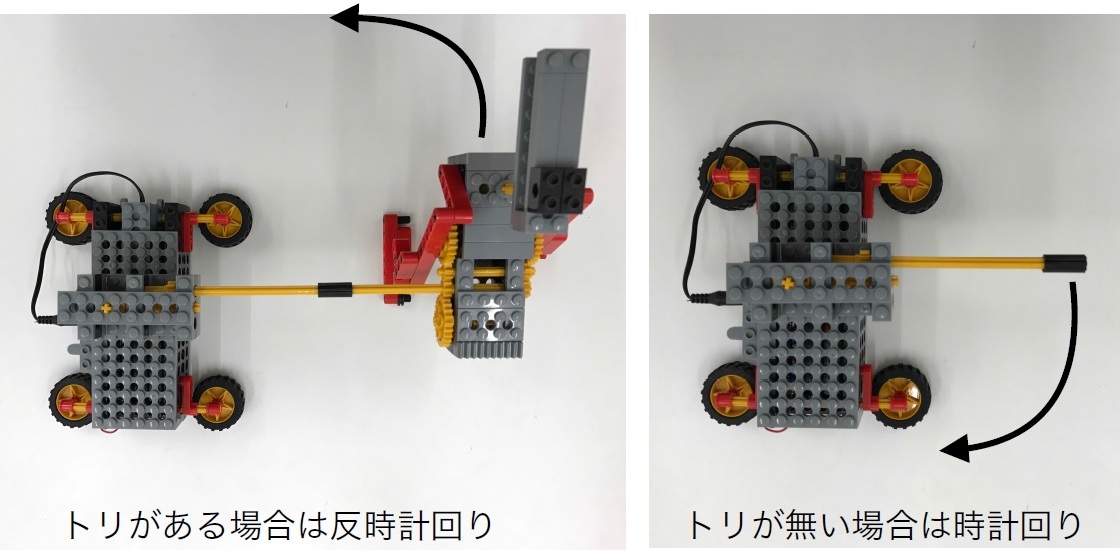
この回転が不思議なのは、ダチョウを取り付けて歩かせている時と比べると、逆回りで、しかもかなり高速なことです。
ここから、回転塔内のギアトレーンが、テケテケドリの歩むスピードや周回方向を決定付けている訳ではないことが分かります。
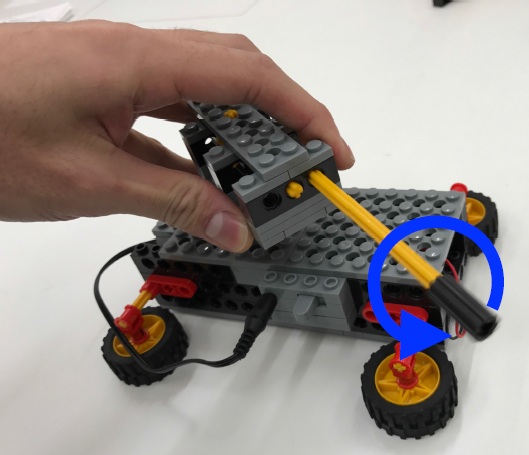
さらに、勢いよく回る回転塔を手で止めてみても、さもお構いなしと言わんばかりに、モーターは軽快に回り続けます。変ですね。
回転部(ギアやタイヤ)を無理矢理止めてしまえば、モーターも唸(うな)りを上げたまま止まってしまうのが常(つね)のはずです。
但し、このとき、ドライブシャフトは回転しており、これまで止めようとすると、さすがにモーターも苦しそうです。
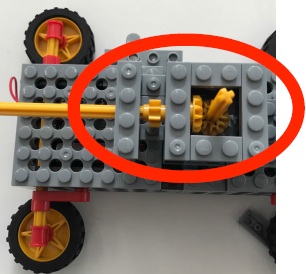
実は、これは差動歯車装置の一種であり、モーターの回転は、シャフトの回転でも、回転塔の旋回でも、どちらでも消費できる機構になっており、次の関係が成立しています。
モーター回転数(スイッチ右) = シャフト回転数(ダチョウ前進方向) + 回転塔の時計回り回転数(ダチョウ後退方向)
だから、モーター回転数100%を使って、シャフトだけ回転しても、回転塔だけが旋回しても、50%ずつ分け合うのでも、合計100%になりさえすれば何でも可能なのです(*4)。面白いですね。
テケテケドリを外して、なぜ回転塔の方がほぼ100%で回ろうとするのかは、負荷(摩擦力)の差で決まります。
つまり、ドライブシャフトを回すよりも楽になっているからで、設計や部品が異なれば逆になっても不思議ではありません。
*1 トラックの荷台の下で、走行に合わせてクルクル回る鉄の棒を見たことがあるでしょう。
*2 テケテケドリが片脚を浮かしても立っていられるようになります。
*3 同一直線上に並ばない(回転軸がずれた)ドライブシャフト同士を繋ぐ継手(つぎて)として、ユニバーサルジョイント(自在継手)というジョイント機構が産業利用されていますが、これはミドルコースで別の機会に学びます。
*4 モーター100% = シャフト110% - 回転塔10%(反時計回り)の関係すら可能です。
1.4 <アドバンスプログラミングコース『ホイールローダー/フォークリフト(2)』>

《割愛し、テクニカルコンテスト(ライントレーサー)研究と成果を纏めます》
http://robocobo.sakura.ne.jp/blog/robot/adv1-1807.pdf
1.5 <プロ3年目コース『六脚ロボット(1)』>
終に、現コース生にとって最後の夏タームに入りました。6本脚の昆虫型ロボットです。
サーボモーター(MG995)を4個使い、(前後)左脚、(前後)右脚、(左右)中脚、ツノの各関節を動かします。
それは即座に、ロボット全体として動きの自由度が4あることを意味します。
単なる関節の多いロボットは、モーター1個+リンク機構(ギア・ロッド・ペグ等)でも作れます。
しかし、モーターが正確な位置決めの可能なサーボ型であり、4個であり、触覚センサー(入力)を2個搭載して動作条件を判断できるマイコン制御であることから、動きに非常に多くのコンビネーション(組合せ)を持たせることができる筈です。
翌月以降のテキストで紹介されるであろう歩行制御プログラムの他にも、
「何か面白い(人を笑わせる)モーションを付けることができるかもしれない」
という視点で一人想像笑いするような人(不気味?)になって欲しいと思います(*1)。
一方で、エンジニアの卵としては、4個のサーボモーターを同時に速く(一度に大変位で)回すと、電源容量の不足(電池の出力電圧の低下)から誤動作を引き起こしかねないと心配して、なるべく滑らかに動かす制御を好む姿勢を身に付けます。
決して、全身を激しく揺さぶる『ふ○っしー』のような動きを期待しないことです(*2)。
今月は2回とも製作編でしたので、詳細を割愛します。
*1 それはクリエイターの最も重要かもしれない視点です。
成果物を人から見て/使って喜んでもらえるのは、何より元気が出ます。
足りない能力を勉強して補う勇気も出ます。
それが“仕事”の原点であり、“稼ぎ”になります。
*2 このような“役立たず”だけど鋭いロボットを世に送り出す先覚者、高橋智隆先生に期待したいところです。
生物型ロボットの動きは、まだまだトロいですね。頭脳(AI)だけではなく、生物のように省エネで機敏に動かすのも、次世代のロボット技術が狙う分野です。
それは、必ずしもサーボモーターである必要はなく、人工筋肉と呼ばれるアクチュエーターかもしれません。
2. 今月の課題
<スタートアップ(全コース)>
特にありません
<プライマリーコース>
- オリジナル図形プリント
<ベーシックコース>
- オリジナル課題プリント(3面図+設問)
- 上記授業内容を精読する(概ね3年生以上/低学年は補助の下で)
<ミドルコース>
- オリジナル課題プリント(3面図+設問)
- 上記授業内容を精読する
<アドバンスプログラミングコース>
特にありません(ライントレーサー全国進出枠、獲ったどー!)
<プロ3年目コース>
- 卒業作品を構想する
3. 今後の授業スケジュール
――――――――――【佐藤教室長】――――――――――
[東福間]第1・3土原則
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドプロ
⇒ 8/4, 18, 9/1, 15, 10/6, 20
[東福間プロ]第2・4日原則
- 15:30~ プロ3年目
⇒ 8/12, 26, 9/9, 23(卒業), 10/14, 28(卒業作品製作・発表会予定)
[中間]第2・4土原則<なかまハーモニーホール>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドプロ
⇒8/11 第1回 ハーモニーホール3F会議室2
8/25 第2回 ハーモニーホール3F会議室2
9/8, 22, 10/13, 27
[小倉北]第1・3日原則<ムーブ>
- 10:00~ ベーシック/プライマリ
- 13:00~ ミドル
- 15:00~ アドプロ(/ロボプロ2018年9月~)
⇒8/ 5 第1回 ムーブ5F小セミ
8/19 第2回 ムーブ5F小セミ
9/2, 16, 10/7, 21
――――――――――【菅本教室長】――――――――――
[とばた]第2・4土原則<ウェルとばた8F>
- 13:00~ 全コース(プロを除く)
⇒ 8/11, 25, 9/8, 22, 10/13, 27
――――――――――【中野教室長】――――――――――
[八幡東]第1・3土原則<レインボープラザ4F>
- 13:30~ ベーシック
- 15:30~ ミドル
- 17:30~ アドプロ
⇒ 8/4, 18, 9/1, 15, 10/6, 20
[小倉南]第2・4日原則<総合農事センター2F>
- 10:30~ ベーシック/プライマリ
- 13:00~ ミドル /アドプロ
⇒ 8/12, 26, 9/9, 23, 10/14, 28
4. お知らせ
1) ロボット教室 九州地区大会7/26(木)福岡市科学館 サイエンスホールで開催されました。

福岡の他、山口~沖縄各県の教室から参加があり、250名を超える観覧の中、
ライントレーサによるスピード競技(38名・欠場2名)や、創作ロボットの発表(15名)、高橋智隆氏のユーモラスな講演と写真撮影・サイン会が続き、盛況でした。
今年は昨年以上(動員数2倍)に盛り上がったように、来年はもっと盛り上がるでしょうし、当教室としても更に取り組みを強化して参ります。
出場者の皆さん、お疲れ様でした。
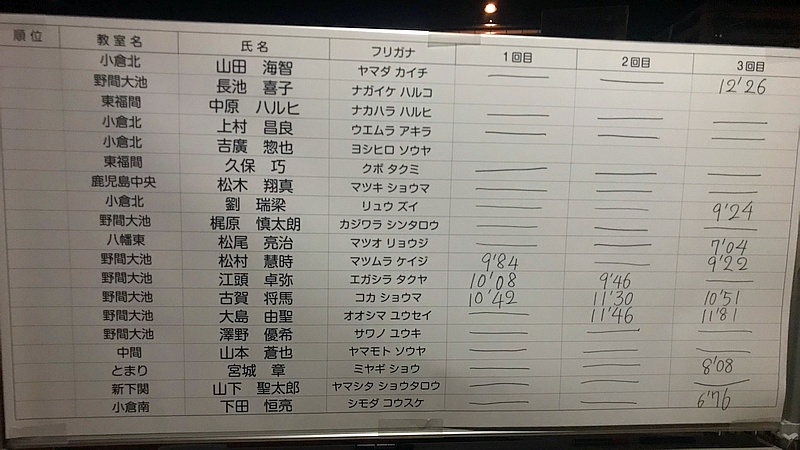

【テクニカルコンテスト部門】
[東福間]中原・久保・時安
[中 間]杉本<1位6'43>・山本・岩熊
[八幡東]下田<2位6'76>・松尾<3位7'04>・池本
[小倉北]井上<5位7'64>・榊<7位7'98>・劉<11位9'24>・江平<12位9'35>・早川<14位10'40>・山田<17位12'26>・関<18位14'85>・中村・数住・上村
[小倉南]辻<6位7'84>・大川・吉良

【アイデアコンテスト部門】
[中 間]ミドル…大塚『トカゲロボット』
[八幡東]ベーシック…倉富『ウインチX』

テクニカルコンテスト部門は、昨年の惨敗の雪辱を果たし、全国大会出場枠(上位3/36名)を我らが教室で独占した他、上位7位に6名が入るなど、圧勝しました!
引き続き、アイデア部門の審査結果(発表期日8/9)に期待します。
地区大会の様子を動画で撮影しておりますので、研究用に活用下さい。
下記URLからダウンロードしてご覧下さい。
https://www.dropbox.com/sh/e1jco87mtp0epmj/AACxkWmodnMruMAZe7qg3dJpa?dl=0
2) 全国大会 観覧申込み - 8/1(水)17:00~定員まで ※
※Web申込みサイト
http://kids.athuman.com/robo/event/convention/2018/
【注意】
・全国大会は 8/25(土) 東京大学 安田講堂です
本部からの受付メールを受信可能なアドレスを入力下さい
・全国大会出場者のご家族様は観覧できますが、出場の選考洩れに備える場合は申込み下さい
3) 7/29オリジナル電子工作講座『RCドレミ』終了
台風12号の接近が心配される中、7/29(日) 9:55~15:45 ムーブ4F工芸室にて、7組の方に参加頂きました。
電気抵抗値を音の高さに変換できる原理を学び、オルガン回路を組んで演奏したり、
音で判定できる導通テスターや水分センサー、明るさセンサーに改造したりして遊びました。
4) 小倉北ロボティクス・プロフェッサー(ロボプロ)コース説明会
アドプロ1年以上履修生・外部生を対象に、小倉北教室で今秋9月~開講します。
小6以上の方へご案内メール差し上げました(5/31, 7/28)。
ご興味のある方は、下記いずれかの説明会にお越し下さい。
◆8/ 5(日) ムーブ5F 15:15~ / 16:30~(小倉北アドプロ生向け)
◆8/19(日) ムーブ5F 15:15~ / 16:30~(小倉北アドプロ生向け)
- 各時間先着8名まで/事前にご予約下さい
- 募集は9月と3月のみです
- 9月スタートには8/20までにお申込み下さい
- アドプロ進級/継続/ロボプロ進級で悩まれる方はご相談下さい
5) 6月課題 高得点者 []内は教室と学年
◆プライマリ【3名平均 図形2.7】
5点…なし
4点…なし
◆ベーシック【23名平均 図面2.6+設問2.8=5.3】
10点…森崎[八幡東3]
9点…柴田[小倉北3]
8点…下木[八幡東3], 林田[小倉南1]
◆ミドル【22名平均 図面3.1+設問2.3=5.4】
10点…なし
9点…荒木[小倉北4]
8点…田中[東福間6]
東福間・中間・小倉北教室 佐藤 / 八幡東・小倉南教室 中野