2.今月の課題
3.今後の授業スケジュール
4.お知らせ
1. 6月授業内容
1.0 <スタートアップ(全コース)>
割愛します。
1.1 <プライマリーコース『チャリダー』>
割愛します。
1.2 <ベーシックコース『ロボモンキー』>

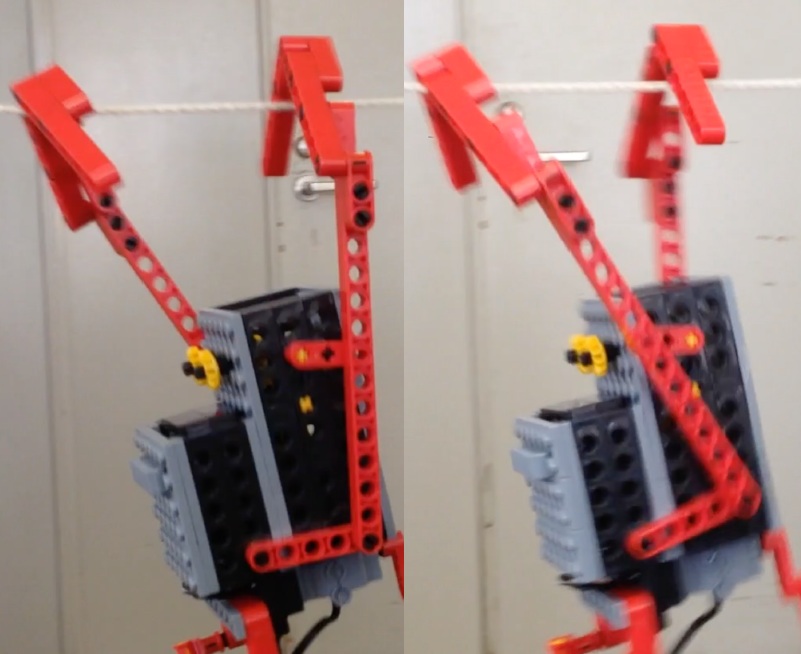
手ながザルが綱(つな)を渡(わた)ります。
重い本体をぶら下げたまま長い手を動かさなくてはならないので、モーターとギアには相応(そうおう)の負荷(ふか)が掛(か)かり、「ガリガリッ」と嫌(いや)な音を立てるだけで、なかなか進まない人もいました。
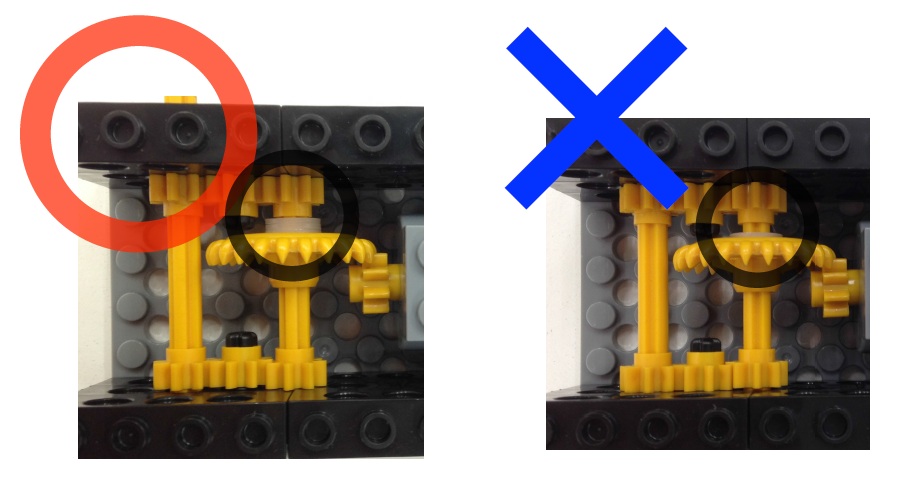
このガリガリ音は、ベベルギアの噛(か)み合わせが緩(ゆる)いために滑(すべ)っている音で、ギアの歯をどんどん削(けず)ってしまいます。
モーターに削れた黄色い粉(こな)が付いていたでしょう。
そうならないように、テキストp.6でワッシャーを3枚使うよう、青字の部品名・個数で書かれています。

写真だけを見てワッシャーを1枚しか入れないのは、何のために必要な部品かを考えていない(ワッシャーがぐらぐらでも気にしない)結果です。
組み付けるすべての部品に(飾りも含めて)意味がありますので、常に追求しましょう。
ワッシャーが足りないと、ベベルギアとピニオンギアうすの間に隙間(すきま)が空き、ベベルギアがしっかり固定されない状態にあります。
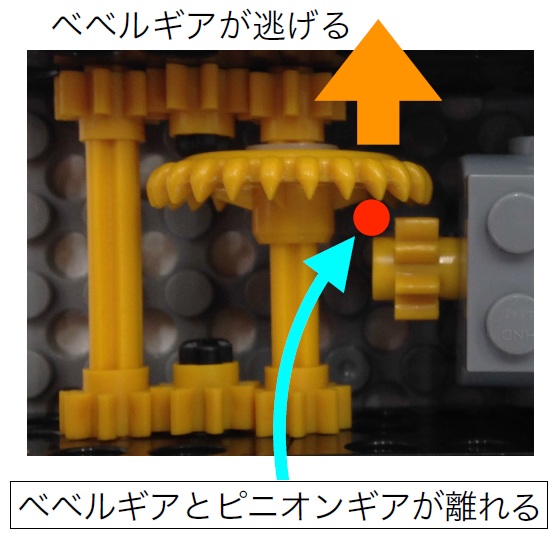
すると、モーターからの強い回転力を受けた時に、写真のオレンジ矢印で示す方向にベベルギアがずれ、モーター軸(じく)のピニオンギアと噛み合わなくなってしまいます。
この状態がまさにガリガリ音の発生源となるのです。
さて、ギアがしっかり噛み合ったら、もう一つ大事な電池パワーさえ十分ならば、スイスイと綱渡りするモンキーが見られます。
この手の動きにも注目してください。
モーターによって回転しているのは、目玉の横のクランクまでですが、手の先は綱渡りするのに都合(つごう)よく、
右手で綱をたぐり寄(よ)せているときは、左手を浮(う)かせて後ろに運び、次には反対の手で同様に進むことを交互(こうご)に繰(く)り返しています。
このような動きを変換する仕組みを“リンク機構(きこう)”と呼び、もっと上級のコースで改(あらた)めて研究しますが、まずは「確かにそうなるよね」と思えるまで観察してみましょう。
そうすると、2日目で手の振(ふ)れ幅(はば)を大きくしてスピードアップした改造(p.19)も、感覚的に理解できるでしょう。
なお、実際にスピードアップできるかどうかは、やはり電池パワーによります。
てこの原理により、「速く動かそうとするほど、力が弱くなる」宿命(しゅくめい)がありますので、力の弱いモーター(電池)から欲張(よくば)って速い動きを取り出そうとしても、逆に遅(おそ)くなるか止まってしまうことがありましたね。
(ガリガリ音で進まないのは、別の話ですよ)
ということは? 弱い電池でも動かす方法があるってこと?
いつもはロボットを速くする改造に気を取られますが、遅くすることで得(え)られるメリットもあるのですよ。
ギアで減速(げんそく)するのでも、手足を短くするのでも、それを自分の手で実験して確かめてみてください。
1.3 <ミドルコース『チクタクロック』>
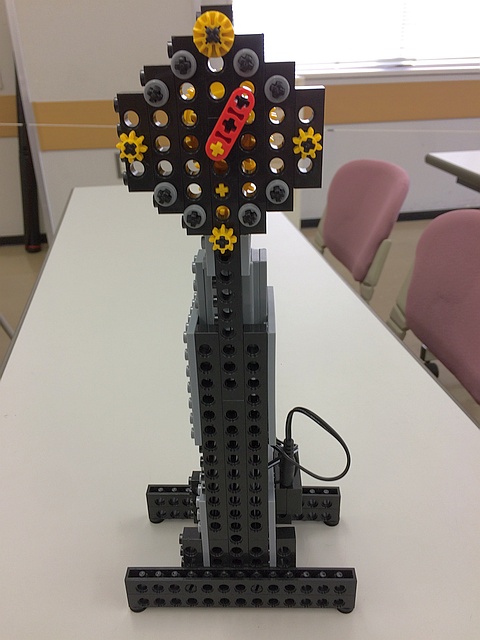
振り子時計です。ロボットというより、からくり仕掛けを匂わせます。
皆さんの家には振り子時計があるでしょうか?
先生はオークションで手に入れました・・・昭和40年代のホンモノを。
1日目は、時計の針をモーターで「ウィーン」と回しました。味気ないですね。
これに振り子を付け足して揺(ゆ)らしても、摩擦(まさつ)のせいで時間と共に減衰(げんすい)しますので、揺れ続けるには、振り子へのエネルギー供給が別途(べっと)必要です。

通常(?)は電磁石が使われます。だから、振り子時計の裏には、モーター用の電池と電磁石用の電池が2本入るようになっていることが多いですね。
時計の針と振り子は全く相関(そうかん)なく、独立して動いています・・・それは、ニセモノです!
本来、振り子時計の振り子は飾りではなく、一定の周期で振れる性質(等時性=とうじせい)を利用した、時のリズムを正確に刻(きざ)むための肝要(かんよう)な仕掛けです。
電池やモーターが無い時代から動いていた時計、エネルギー源としてはゼンマイがよく使われていました。

2日目は、時計の針を、巻き上げたおもり(位置エネルギー)で回しました。
ただし、それだけでは、時計の針が目まぐるしく回り、あっという間におもりが着地しておしまいです。
時のリズムに合わせて、与えたエネルギーを少しずつ使い、少しずつ針を進める仕掛け(脱進機=だっしんき)が必要です。
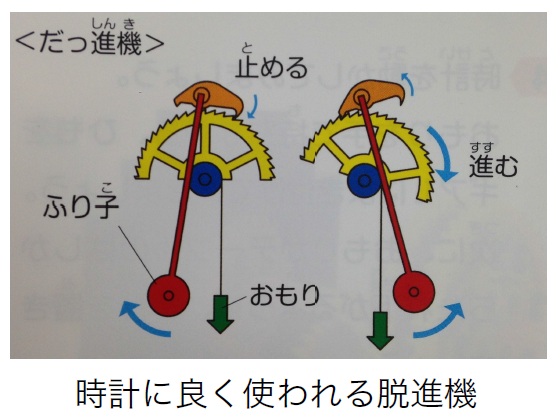
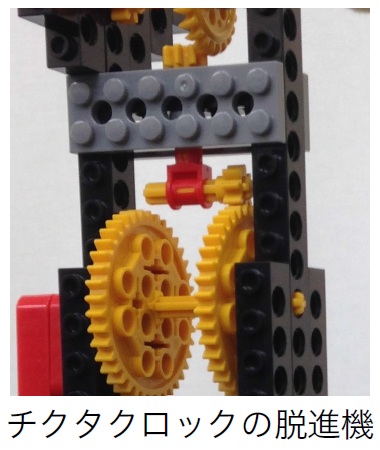
チクタクロックの脱進機は、実際の時計用とは少し違いますが、このシンプルな部品構成で脱進機の役割を立派(りっぱ)に果(は)たしています。
すでに脱進機を知っていた人も、この機構はなかなか思い付かなかったのではないでしょうか。
何しろ、おもり(タイヤL)が少しだけ下がる分の微弱(びじゃく)な位置エネルギーで、針の回転と振り子の加勢(かせい)を滞(とどこお)りなく繰り返す、微妙(びみょう)なエネルギー収支(しゅうし)バランスが必要です(*1)。
テキストの設計はやはり絶妙(ぜつみょう)です。
テキスト通りに組み上げると、随所(ずいしょ)からチクタク音が聞こえてきました。
そうです、いわゆるチクタク音の正体は脱進機だったのです。
初めて電池とモーターを使わないマシン、新鮮です。

振り子の長さで音のリズム(時計の速さ)を変えることもできます。
振り子時計の基本原理が詰(つ)まっています。
このチクタク音を長く持続させるポイントは2つ。
・振り子を長く(重さは関係ない)
・おもりの位置エネルギーを高く(巻き付ける紐を長く)
このうち、振り子を長くすることで重くなると、どうしても摩擦や、振らせるのに必要な力(慣性モーメント)を増やし、脱進機によるエネルギー供給が足りず停止しがちです。
その場合は、おもりを重くするか、巻き付け半径を大きくする(*2)と有効です。
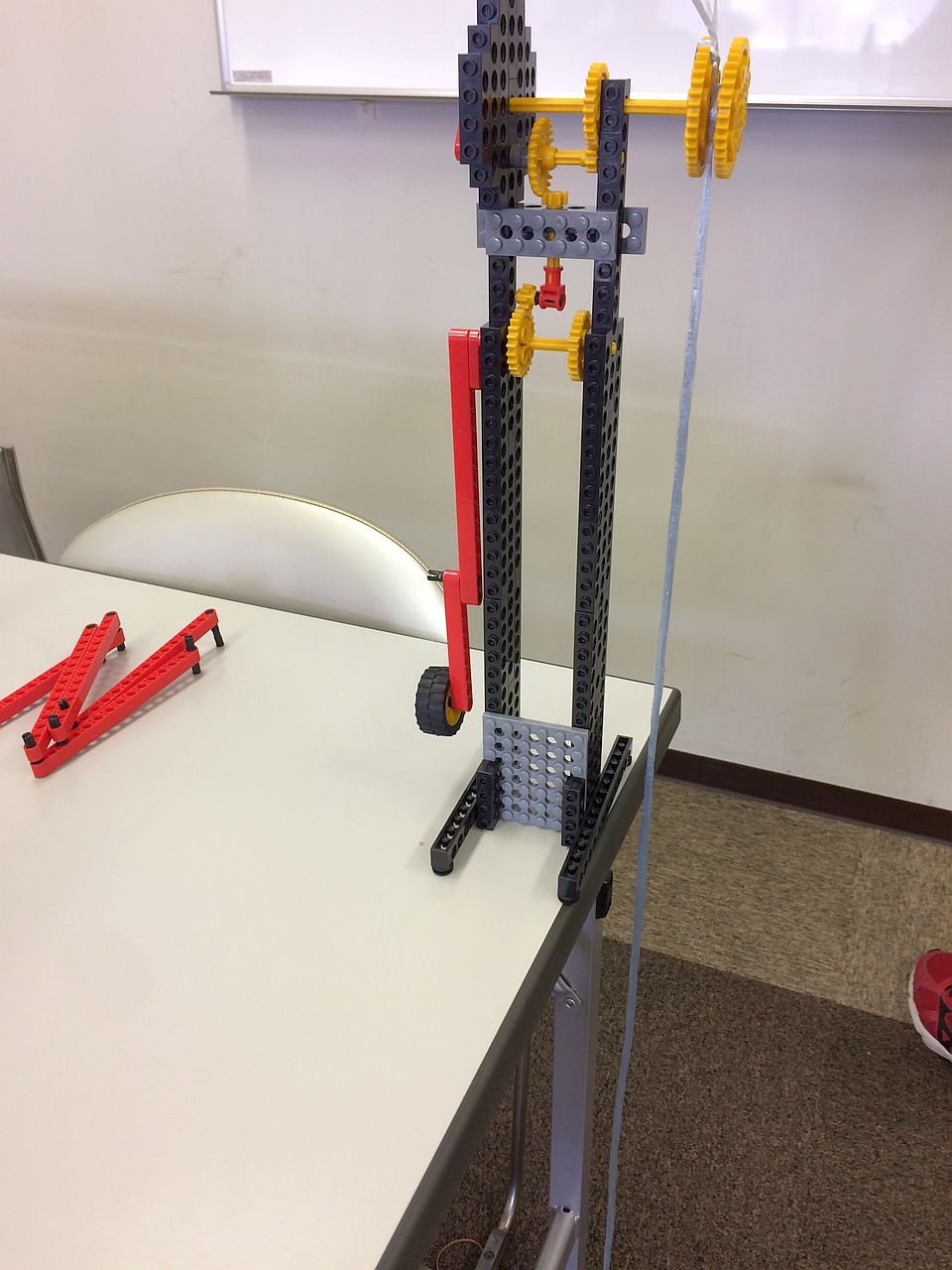
工夫すれば、160cmの紐で100秒以上のチクタク音を奏でることができます(*3)。
この音、レトロでいいですね。
*1 収支とは、出し入れのこと。おもりが出す位置エネルギーを脱進機に入れ、摩擦熱(音も含む)として消費していきますが、
このエネルギー(≒力)が必要以上に大きいと、振り子を無駄(むだ)に加勢してエネルギーを浪費(ろうひ)し、逆に小さいと、止まってしまいます。
*2 てこの原理により、おもりを重くするのと同様に回転力(トルク)が増しますが、その分速く垂れ下がります。
*3 *2とは逆に、巻き付け半径を小さくし(おもり降下速度を落とし)、弱くなったトルクでも動くよう脱進機のギアLをギアMに替えて(振り子の振れ幅を小さくして)、標準的な机上の高さにも拘(かかわ)らず100秒を超えた小倉北教室の井上君(小4)もあっぱれでした。
1.4 <アドバンスプログラミングコース『ホイールローダー/フォークリフト(1)』>
ほぼテクニカルコンテスト(ライントレーサー)研究に時間を割いている為、割愛します。
これら建機ロボットも面白いのですが…
1.5 <プロ3年目コース『不思議アイテムIII-1(3)』>
授業中はアルゴリズムを深堀りする時間が取れないため、ここでは先月(第4回)の、赤外線ビームが飛来する方角を推定するプログラムについて考えてみます。
赤外線受光素子を搭載したオムニホイールロボットを360°旋回させ、10°刻みで配列 int A[36] に記憶させたところ、
int A[ ] = {
0,0,0,0,0,0,0,0,0, // 0~ 80°
1,1,1,1,1,1,1,1,1, // 90~170°
0,0,0,0,0,0,0,0,0, //180~260°
0,0,0,0,0,0,0,0,0 }; //270~350°
で初期化した状態と同じだったとします。
ここで、配列中の各値(1/0)は、赤外線の受光有無を表します(*1)。
for( s=0; s<36; s++ ) { //開始位置を探す
if( A[s]==1 ) break;
}
for( e=s+1; e<36; e++ ) { //終了位置を探す
if( A[e]==0 ) break;
}
で、検出開始インデックス s=9, 検出終了インデックス e=18 が得られますから、飛来角度は (s + e)*10/2 = 135°と正しく得られます。
同じアルゴリズムで、
int B[ ] = {
1,1,1,1,1,1,1,0,0, // 0~ 80°
0,0,0,0,0,0,0,0,0, // 90~170°
0,0,0,0,0,0,0,0,0, //180~260°
0,0,0,0,0,0,0,1,1 }; //270~350°
の場合はどうでしょうか。
s=0, e=7 となり、飛来角度を35°と推定してしまいます。
実際は 340(-20)°~ 70°の中心値 25°と推定すべきです。
先に終了位置を探しておきましょう。
for( e=0; e<36; e++ ) { //終了位置を探す
if( B[e]==0 ) break;
}
for( s=e+1; s<36; s++ ) { //開始位置を探す
if( B[s]==1 ) break;
}
これで、s=34, e=7 と正しい値が得られますが、最初のデータ A[ ] に対しては s=9, e=0 となって、中心角度を 225°と誤ってしまいます。
やはり、終了位置は開始位置の後に探しましょう。
for( e=0; e<36; e++ ) { //先ず終了期間まで進める
if( A[e]==0 ) break;
}
for( s=e+1; s<36; s++ ) { //先に開始位置を探す
if( A[s]==1 ) break;
}
for( e=s+1; e<36; e++ ) { //次に終了位置を探す
if( A[e]==0 ) break;
}
これで、A[ ] については問題ありませんが、今度は B[ ] に対して、s=34 は良いとして、e=36 で終わってしまいます。
もう一周させましょう。
for( e=0; e<36; e++ ) { //先ず終了期間まで進める
if( B[e]==0 ) break;
}
for( s=e+1; s<36; s++ ) { //先に開始位置を探す
if( B[s]==1 ) break;
}
for( e=s+1; e<72; e++ ) { //次に終了位置を探す(最長2周分)
if( B[e%36]==0 ) break;
}
出ました! お助けヒーロー演算子“%”の登場です!
例えば、2周目で e=40 の時、B[e] は不正アクセスになりますが、B[e%36] と書いて B[4] を正しく参照できます。
これで、B[ ] でも s=34, e=43 となり、((s + e)*10/2) % 360 = 385 % 360 = 25°と正しく求められます。
int C[ ] = {
1,1,1,1,1,1,1,1,1, // 0~ 80°
0,0,0,0,0,0,0,0,0, // 90~170°
0,0,0,0,0,0,0,0,0, //180~260°
0,0,0,0,0,0,0,0,0 }; //270~350°
に対しても、s=36, e=45 で 45°と一応(*2)正しく機能します。
(;´▽`A`` ふぅ、安心ですかぁ?
さらに考えるならば、自然界の計測値にはノイズ混入が付き物であり、赤外線も壁などで乱反射して届いたり、部品などに当たって瞬間的に遮蔽(しゃへい)されたりするでしょうから、所々0⇔1が入れ替わることも前提にした方が信頼性が高まります。
サンプルプログラム[IRSeekerSt2], [IRSeekerSt3]では、「同じ値が3連続以上」のような条件を位置検出に加えていますが、この仕様の是非はともかく、いい加減に作ったバグだらけのコードに見えますので(*3)、前例の配列仕様に則った改良例を記しておきます。
int D[ ] = {
0,1,1,1,1,0,1,1,1, // 0~ 80°
0,1,1,0,0,0,1,0,0, // 90~170°
0,0,0,0,1,0,0,0,0, //180~260°
0,0,0,0,0,0,0,1,0 }; //270~350°
のようなノイズ混入データに対して、
for( e=0; e<36; e++ ) { //先ず終了期間(e=12)まで進める
if( D[e]==0 && D[(e+1)%36]==0 && D[(e+2)%36]==0 ) break;
}
for( s=e+3; s<72; s++ ) { //先に開始位置(s=37)を探す
if( D[s%36]==1 && D[(s+1)%36]==1 && D[(s+2)%36]==1 ) break;
}
for( e=s+3; e<72; e++ ) { //次に終了位置(e=48)を探す
if( D[e%36]==0 && D[(e+1)%36]==0 && D[(e+2)%36]==0 ) break;
}
では s=37, e=48 となり、((s + e)*10/2) % 360 = 425 % 360 = 65°と求まります。感覚的にも合いそうですね。
どうです? この程度のことでも、突き詰めると高度でしょう?
ゲームのバグに文句を言う前に、抜け目の無いプログラムを書くことの難しさを知ってください。
そして、失敗が成功を生むように、バグをたくさん出して成長してください。
赤外線の飛来角度が推定できたならば、姿勢センサーを搭載して(*4)、その方角に向き直る可愛らしいペット(怖い軍事ロボット?)の完成です。
プログラム中、MPU6050::getMotion6(&ax, &ay, &az, &gx, &gy, &gz) により、z軸(鉛直方向)周りでの(水平回転)角速度 gz を取り出し、これを微少単位時間毎に積算(高校数学の時間積分)して角度を算出しています(*5)。
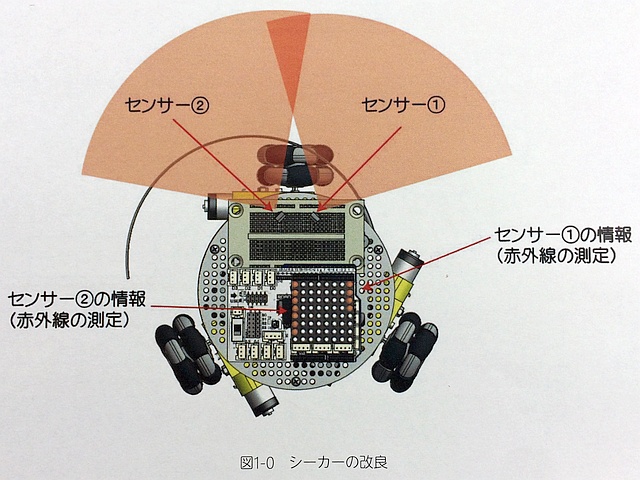
第5回の内容では、赤外線追従ロボットへ改造しました。
姿勢センサーは外しましたが、赤外線受光素子を左右斜め前方に2個取り付け、その受光レベルの強弱で(*6)、ボール代わりの赤外線ビーコンマシン(モーター無し空回りオムニホイールベース)に向かって走ります。
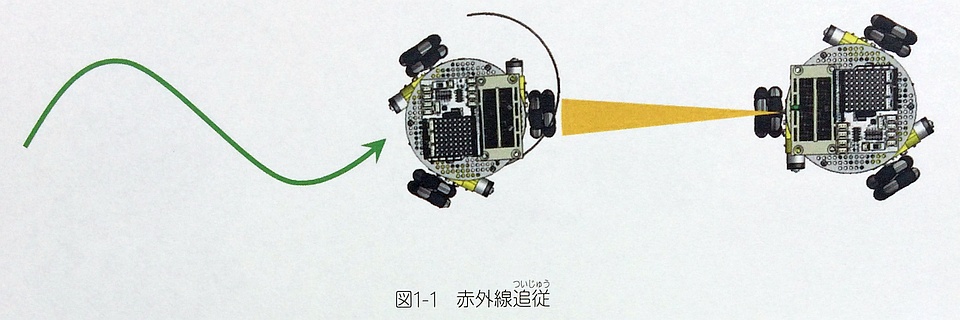
ボールマシンに接触したしたことを前部に取り付けたタッチセンサー(+針金)で検知して、一旦止まります。
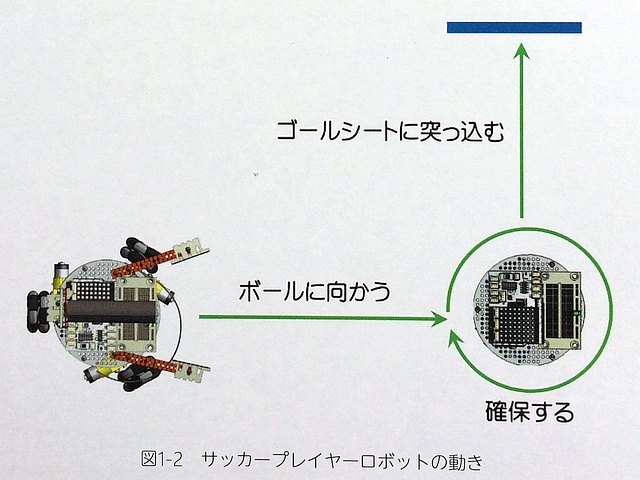
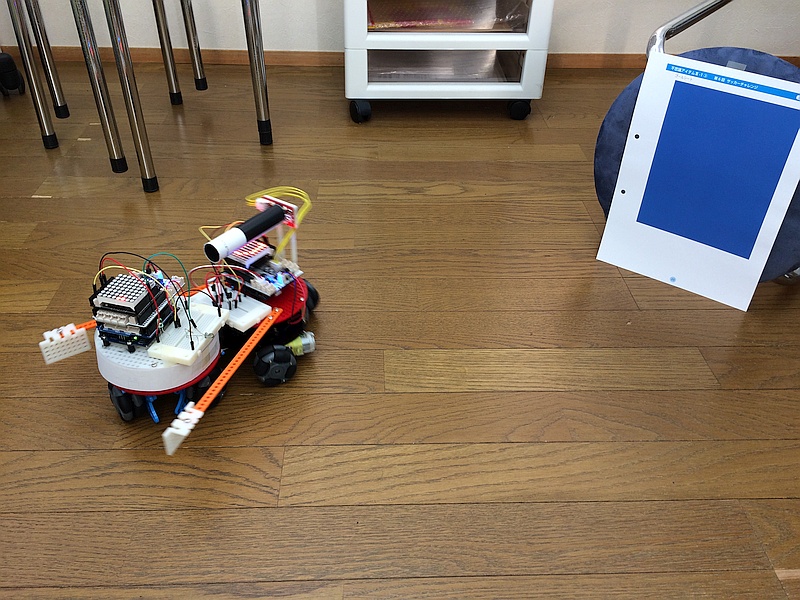
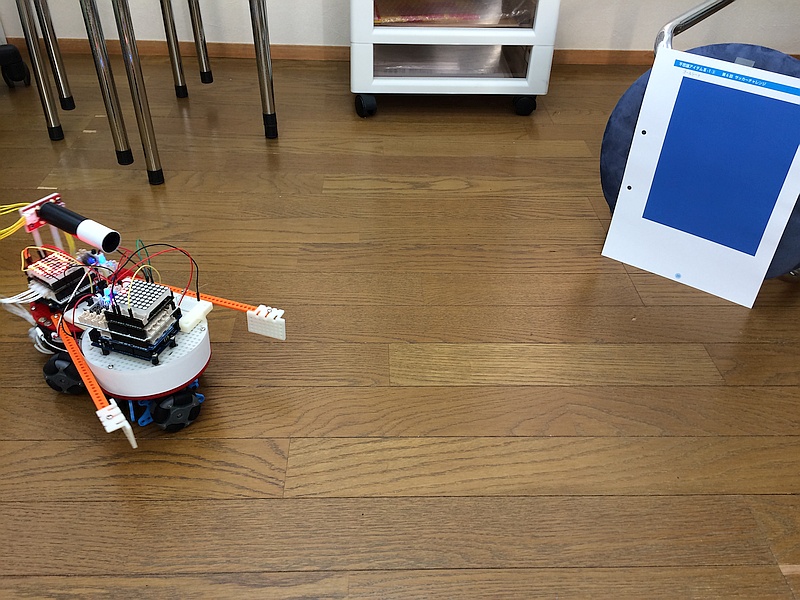
さらに第6回の内容で、サッカー(1人プレイヤー)ロボットへ発展させました。
両アームの間にボールマシンを抱えたまま、カラーセンサー(+覗き円筒)でゴール代わりの青い紙面を見つけるまで旋回し、ドリブルシュートするプレイです。
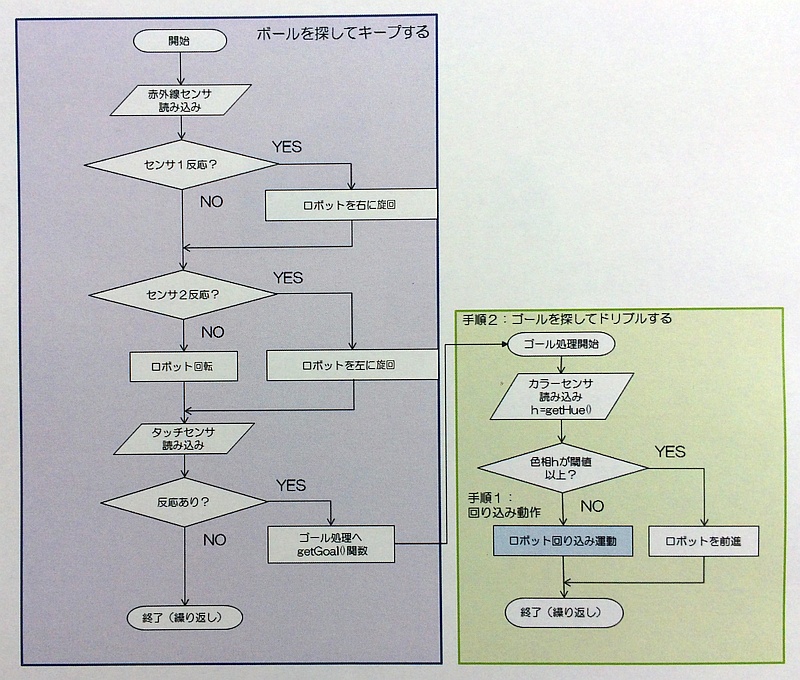
高度な制御に見えますが、赤外線やカラーセンサーの機能(デバイス+ライブラリ)を利用した恩恵が大きいのであって、フローチャートやプログラム[RobotSoccer]を見ても理解し易いように、さほど複雑なアルゴリズムではありません。
プログラムの難しさは、意外な所にあったりします。


ここで授業時間が終わりました。サッカー個人プレイ大会を次回に持ち越します。
*1 実際のサンプルプログラムでは、赤外線受光強度の指標となる受信データ長が90以上か否かで判定しています。
*2 一応と言ったのは、s=36 を直接的に見つけたのではなく、一周して見つからなかったから s=36 で止まった結果であり、それでも、
どこかに必ず‘1’がある前提ならば、アルゴリズム上 s=0 を見過ごしたことになるので、ちょうど問題なく機能する特例のケースになるからです。
このようなトリッキーなアルゴリズム仕様は、何か改変をする際にバグを生み易いので、スッキリ美しい(無駄のない)コードではあるものの、安全上は好ましくありません。
*3 思考が複雑になるので、テキストでは触れてない所ですが、バグの解析に時間を取られた身として、開発側に苦言を伝えておきます。
*4 元より、この方法論により、360°旋回スキャンや10°刻み計測ができていますので、本当は話の順番が逆なのですが。
*5 姿勢センサーについては、2年目コース2017年1月の記事を参照。
http://higashi-fukuma-robot.blogspot.com/2017/01/
*6 強弱の2値(1ビット)だとしても、左右で2ビット4通りの情報が得られますから、左曲がり・右曲がり・直進・旋回(ビーコン探索)のような動作へ割り振れます。
2. 今月の課題
<スタートアップ(全コース)>
特にありません
<プライマリーコース>
- オリジナル図形プリント
<ベーシックコース>
- オリジナル課題プリント(3面図+設問)
- 上記授業内容を精読する(概ね3年生以上/低学年は補助の下で)
<ミドルコース>
- オリジナル課題プリント(3面図+設問)
- 上記授業内容を精読する
<アドバンスプログラミングコース>
特にありません(ライントレーサー頑張るぞー!)
<プロ3年目コース>
- 上記授業内容を精読する(該当テキストページを見ながら)
3. 今後の授業スケジュール
◆小倉北7/1はムーブ4Fで開催します。
◆小倉北7/15は『北九州パレス(勤労青少年文化センター)』で開催します。
◆中間7/28は『中間市生涯学習センター』で開催します。
――――――――――【佐藤教室長】――――――――――
[東福間]第1・3土原則
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドプロ
⇒ 7/7, 21, 8/4, 18, 9/1, 15
[東福間プロ]第2・4日原則
- 15:30~ プロ3年目
⇒ 7/8, 22, 8/12, 26, 9/9, 23
[中間]第2・4土原則<なかまハーモニーホール>
- 13:30~ ベーシック/プライマリ
- 15:30~ ミドル
- 17:30~ アドプロ
⇒7/14 第1回 ハーモニーホール3F会議室2
7/28※第2回 生涯学習センター2F第4研修室
8/11, 25, 9/8, 22
※7/28は代替施設『中間市生涯学習センター』で開催します。
[小倉北]第1・3日原則<ムーブ>
- 10:00~ ベーシック/プライマリ
- 13:00~ ミドル
- 15:00~ アドプロ
⇒7/ 1 第1回 ムーブ4F和室・工芸室
7/15※第2回 北九州パレス2F第1研修室
8/5, 19, 9/2, 16
※7/15は代替施設『北九州パレス(勤労青少年文化センター)』で開催します。
――――――――――【菅本教室長】――――――――――
[とばた]第2・4土原則<ウェルとばた8F>
- 13:00~ 全コース(プロを除く)
⇒ 7/14, 28, 8/11, 25, 9/8, 22
――――――――――【中野教室長】――――――――――
[八幡東]第1・3土原則<レインボープラザ4F>
- 13:30~ ベーシック
- 15:30~ ミドル
- 17:30~ アドプロ
⇒ 7/7, 21, 8/4, 18, 9/1, 15
[小倉南]第2・4日原則<総合農事センター2F>
- 10:30~ ベーシック/プライマリ
- 13:00~ ミドル /アドプロ
⇒ 7/8, 22, 8/12, 26, 9/9, 23
4. お知らせ
1) 5教室合同アイデア発表会7/26(木)福岡市科学館でアイデアコンテスト九州地区大会(第2回)が開催されます。
全国大会はレベルが高すぎますので、発表をするも聞くも、あまり気負わず親子で楽しみましょう!
その前に、小倉北教室の昼休み時間にアイデア発表会を開催しますので、親子で是非ご参加下さい。
先ずは宣言しちゃって、やる気になってみよう! 頑張ってロボットをひねり出そう!
■7/1(日) 11:45-12:45 男女共同参画センター(ムーブ)4F 和室
【発表シート】6月第2回授業で配布した『コンセプト発表用 連想シート』または任意の紙面
http://robocobo.sakura.ne.jp/blog/convention/ConceptSheet.pdf
【発表内容】「こんな(名前の)ロボット作ろうかなと思ってます」程度の意気込み(ロボットは不要)
【発表形式】1人1分程度(プロジェクター・マイク使用)
■7/15(日) 11:45-12:45 北九州パレス2F 第1研修室
【発表シート】7月第1回授業で配布する『アイデアシート』または任意の紙面※
http://robocobo.sakura.ne.jp/blog/convention/IdeaSheet.pdf
【発表内容】「こんな(動きの)ロボットを作るつもりです」程度の意志表明(ロボット披露も可※)
【発表形式】1人2分程度(プロジェクター・マイク使用)
※地区大会応募に向けてロボットをほぼ完成させておく必要があります
2) 5教室合同ライントレーサー予行演習会
7/26(木)テクニカルコンテスト九州地区予選に出場できるアドプロ生向けに、
本番同様の模擬コースを用意して、下記の教室時間を無料開放します。(振替手数料も無し)
奮って参加下さい!
- 退場時間は自由です
- 振替利用の場合は事前連絡ください
- 追加利用の場合は事前連絡不要です
・7/ 1日 小倉北 ムーブ4F 15:00-21:00
・7/ 7土 八幡東レインボープラザ4F 17:30-21:00
・7/ 8日 小倉南 農事センター2F 10:30-16:00
・7/14土 なかまハーモニーホール3F 17:30-21:30
・7/15日 小倉北 北九州パレス2F 15:00-20:30 ※場所ご注意
・7/21土 八幡東レインボープラザ4F 17:30-21:00
・7/22日 小倉南 農事センター2F 10:30-16:00
3) 地区・全国大会 応募スケジュール
◆地区大会 観覧申込み - 6/25(月)12:00~7/5(木)19:00 ※
◆テクニカル部門 応募 - 7/2(月)10:00~7/18(水)18:00 ※
◆アイデア地区大会 応募 - 7/17(火)大会本部必着にて、所定の応募用紙を郵送
◆アイデア全国大会 応募 - 7/19(木)九州本部必着にて、所定の応募用紙・プレゼン動画(3分以内)を郵送
◆全国大会 観覧申込み - 8/1(水)17:00~定員まで ※
※Web申込みサイト
http://kids.athuman.com/robo/event/convention/2018/
【注意】
・6月第1回授業日に配布した赤い案内冊子をご精読下さい
http://robocobo.sakura.ne.jp/blog/convention/RobotConv2018.pdf
・地区大会は 7/26(木) 福岡市科学館サイエンスホールです
・全国大会は 8/25(土) 東京大学 安田講堂です
・アイデア部門の地区大会は予選ではなく、発表会の位置付け(全国大会と別)です
・テクニカル部門の地区大会は予選(全国大会進出に必須)です
・テクニカル出場・観覧のWeb申込みは教室で代行できません
本部からの受付メールを受信可能なアドレスを入力下さい
・全国大会出場者の保護者様は観覧できますが、出場の抽選洩れに備えて念の為申込み下さい
4) 夏休みオリジナル電子工作講座『RCドレミ』
ロボット教室→プロコースの間を繋ぎ、楽しみながら電子回路の基礎をゼロから学べる本格派講座です。
電子工作・回路学習に欠かせないデジタルマルチテスターをプレゼント!
http://robocobo.sakura.ne.jp/blog/lab/RCdoremi2018.pdf
↑本文と同一内容
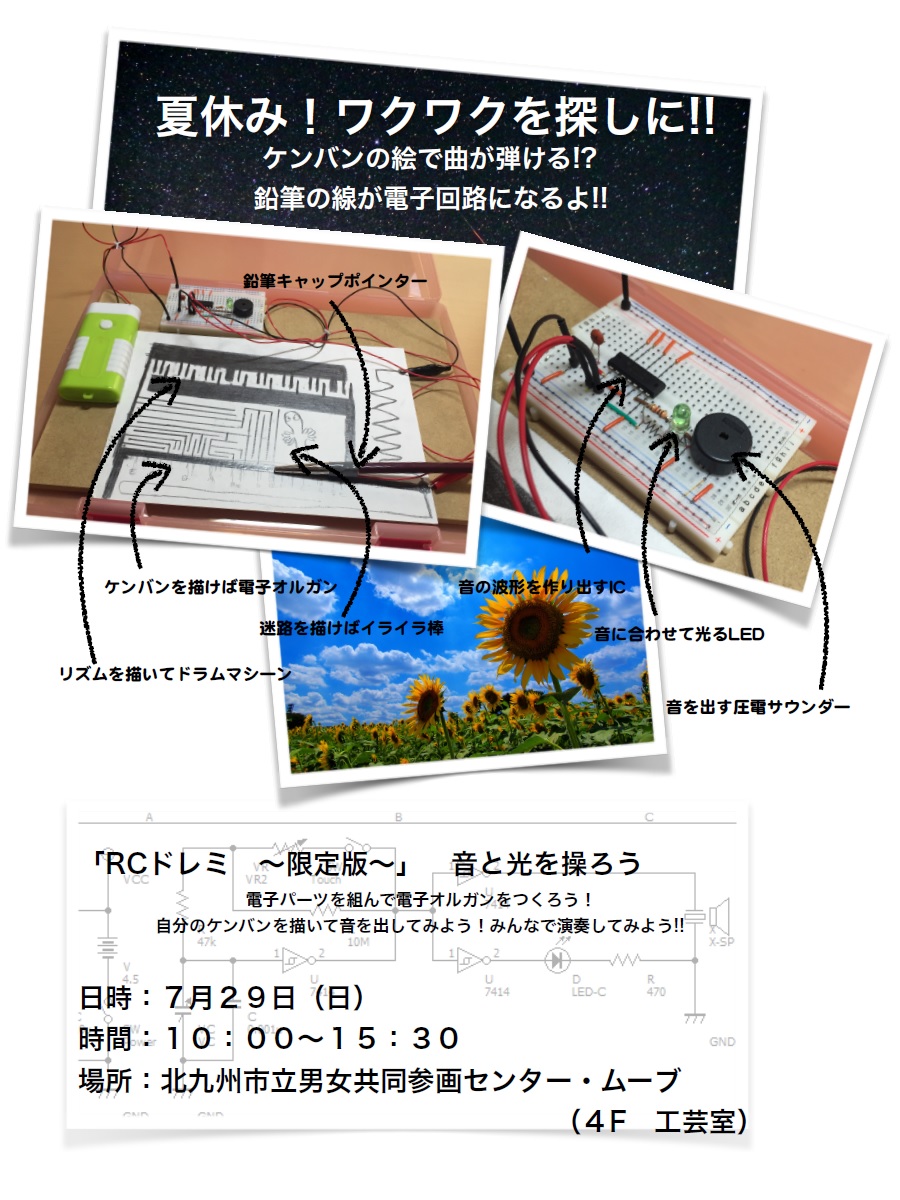
【工作名/タイトル】
『RCドレミ ~限定版~』/「鉛筆一本で音と光を操ろう!」
【内容】
電子部品と発振回路の原理を実験を通して学び、身近な物をオルガン鍵盤にしてしまうガジェットを製作して遊びます。
【講師】中野・佐藤
【会場】北九州市立男女共同参画センター(ムーブ)4F 工芸室
【日時】7/29(日) 10:00~15:30(昼休み12:30-13:30)
【対象】小4~高校生 10名(保護者同伴可)
【費用】8,100円(受講料6,000円+材料費2,100円)
【申込方法】メールにてお申込み下さい。7/15〆切・先着順です。
【申込条件】
- 原則として、8月お引落し額(9月分)に加算して徴収させて頂きます。
7/15~キャンセル・欠席により空席が発生した場合は返金できません。
(キットと製作テキストのみお渡しします)
- 別日にKIGS主催イベントとしても実施予定ですが、KIGS決定に則り参加料が異なります。(一般参加の公平性のため、ご案内しません)
今回の講座(限定版)は、内容・部品においてKIGSイベントと差別化を図っており、電子工学の道に目覚める運命(!?)の生徒さんに強くお薦めします。
- 学習の場につき、同伴者は保護者1名のみ(任意・途中退場可)とし、受講生以外のお子様はご遠慮下さい。
5) 夏休み短期講座(ロボプロ/理科)
いつものロボット教室とは異なる刺激を。夏休みの自由研究にもどうぞ。
http://robocobo.sakura.ne.jp/blog/lab/SummerProgram2018.pdf
【内容】↑PDFをご覧下さい
【講師】中野・佐藤
【会場】北九州パレス(勤労青少年文化センター) 2F
【申込方法】メールにてお申込み下さい。7/10〆切・先着順です。
【申込条件】
- 原則として、8月お引落し額(9月分)に加算して徴収させて頂きます。
7/10~キャンセル・欠席により空席が発生した場合は返金できません。
(キットと製作テキストのみお渡しします)
- 学習の場につき、同伴者は保護者1名のみ(任意・途中退場可)とし、受講生以外のお子様はご遠慮下さい。
A. ロボットエンジニア養成ゼミナール(ロボットプログラミング)
【日時】8/2(木), 9(木), 16(木) 10:00~12:00 全3日間
【対象】小3~中学生 12名(保護者同伴可)
【費用】21,600円(税込・キット代10,800円込)
キット・プログラムを持ち帰り、自宅PCでも研究できます
【注意】ロボティクス・プロフェッサー(ロボプロ)コース相当の内容です。
将来の検討用・体験講座※としてもどうぞ。
※ロボプロ生・今秋スタート生には特に必要ありません
※今秋開講の小倉北教室で体験授業の開催予定はありません/説明会のみ
B. 人工イクラを作ってみよう
【日時】8/2(木) 14:00~15:30
【対象】小学生 12名(保護者同伴可)
【費用】3,780円(税込)
C. たおれない家を建てよう
【日時】8/9(木) 14:00~15:30
【対象】小学生 12名(保護者同伴可)
【費用】3,780円(税込)
D. 君には名探偵の素質があるか?
【日時】8/16(木) 14:00~15:30
【対象】小学生 12名(保護者同伴可)
【費用】3,780円(税込)
6) 5月課題 高得点者 []内は教室と学年
◆プライマリ【4名平均 図形3.5】
5点…板脇[小倉北1], 柴田[小倉北1]
◆ベーシック【27名平均 図面2.2+設問1.9=4.1】
10点…柴田[小倉北3] →偏差値76!
9点…なし
8点…橋本[小倉南1]
7点…なし
◆ミドル【22名平均 図面2.6+設問2.4=5.0】
10点…なし
9点…なし
8点…今橋[小倉南5], 杉本[小倉南6], 橋本[小倉南4], 原[小倉南5]
7点…田中[東福間6], 荒木[小倉北4]
東福間・中間・小倉北教室 佐藤 / 八幡東・小倉南教室 中野