2.今月の課題
3.今後の授業スケジュール
4.お知らせ
1. 9月授業内容
1.0 <スタートアップ>
割愛します。
1.1 <プライマリーコース『メカビートル』>
割愛します。
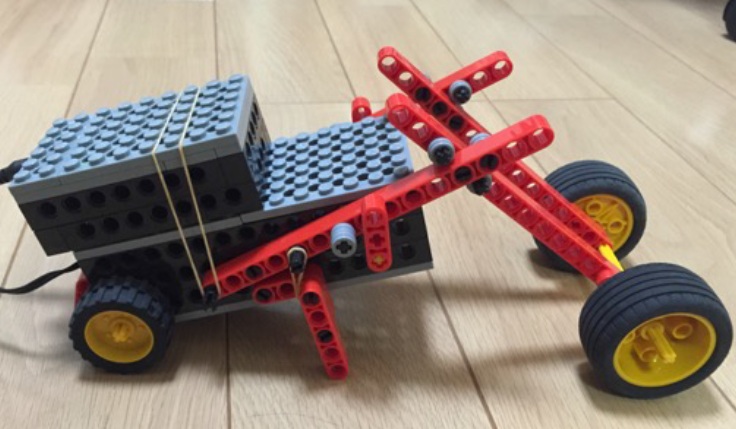
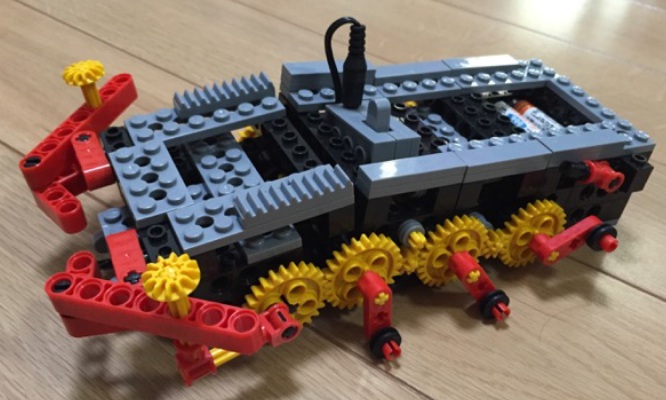
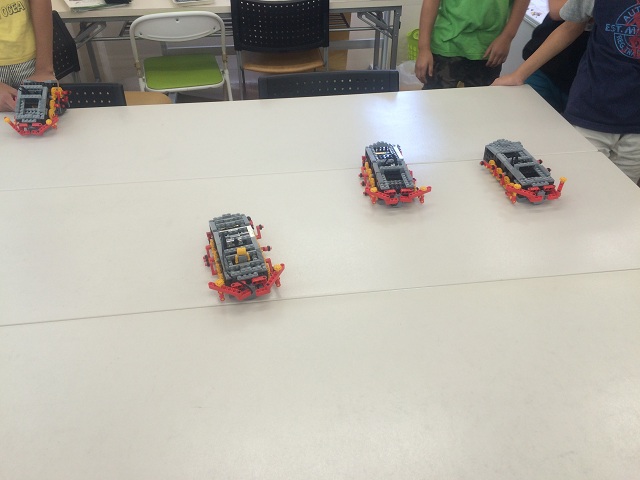
1.2 <ベーシックコース『ジャイアントホッパー』>

バッタ型ロボットです。ギアを介してモーターが駆動するのは、本体の側面で時計の針のように回転するロッド3アナだけです。
それだけなのに、後ろ脚を折り曲げたり、伸ばしたりを繰り返し、尺取り虫のように前進します。どうしてでしょうか?
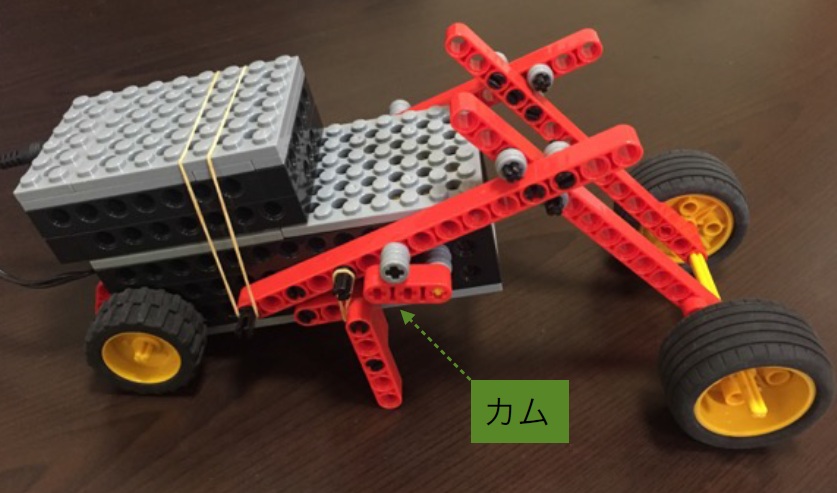
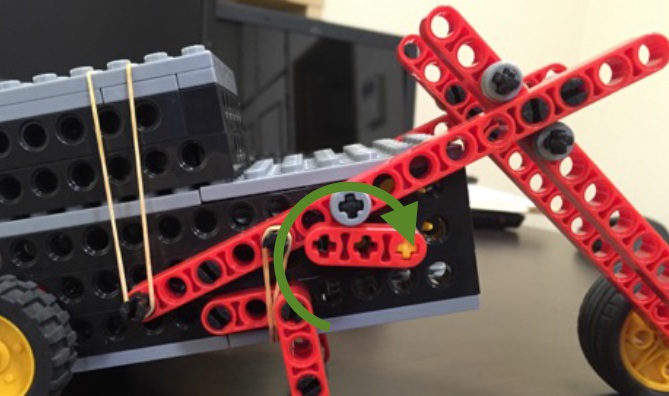
ロッド3アナが1回転毎に後ろ脚を跳ね上げています。
このような回転軸を利用した周期的な運動機構をカムと呼び、例えば、自動車のエンジンが呼吸(吸気と排気)を切り替えるために使われています。
後ろ脚が跳ね上がる時に関節が折れ曲がって、後ろのタイヤLを前方へ引きずります。
この時、本体は進みませんが、次に輪ゴムの力で脚が伸びる時、後ろのタイヤLは微動だにせず、前輪のタイヤSが転がりながら本体を前へ進めます。


後ろのタイヤLは回転しないのに、どうして前進するよう都合良く引きずられたり踏み止まったりしてくれるのでしょうか?
タイヤLは回転しないのですよ。だったら、タイヤLは動かず、後ろ脚の屈伸運動に合わせて本体(前輪)が前後に往復するだけではないでしょうか?
(尺取り虫も、次の一歩を迷ってそのような動きをすることがありますね)
それは摩擦力(滑らないぞ!という力)の効き方が違うからです。
ちょっと難しいのですが、脚を折り曲げる(引っ込める)時はタイヤLを斜め前方上向きに引き上げる力が働き、重い本体を後退させるほどの地面との摩擦力はなくなります。
その結果、タイヤLの方が引きずられるのですが、逆に脚を伸ばす時は、斜め後方下向きに蹴り出すので、地面との摩擦力が強力に働き、推進力になるのです。
消しゴムをノートに軽く当てた場合と強く押し付けた場合とでは、滑らせるのに必要な力が全然違いますよね?
また、消しゴムをノートに斜めに当てると、引く時は軽く滑りますが、押す時は摩擦力を強く感じますね。その両方がタイヤLに作用しているのです。
タイヤLが地面から跳ね上がるほどのパワーがあれば分かり易いのですが、ずっと地面を引きずっていますので、見た目では分かりません。
タイヤLを消しゴムだと思ってください。
タイヤLを回転しないよう止めている理由が分かったでしょうか? 試しに、自由回転するようクランクを取り外してみてください。

最後の競技は“バッタレース”をしました。スピード勝負です。
推進はゴムの弾性力、そのゴムにエネルギーを充填するのがモーターの仕事と言えますから、ゴムはきつく、モーターはパワフルに、というのが理想です。
究極は、有限なモーターパワーをロッド3アナの回転トルク(脚の力)に振るか回転数(脚のスピード)に振るかでギア比を決めたり、それに適した輪ゴムの掛け方や本数を探ったりするのが戦略です。
下記のような素晴らしい改造が生まれていました。
1) モーター軸のピニオンギア ⇒ ギアMへ交換(脚が3倍速く動く)(*1)
2) 側面のロッド3アナ回転中心を端っこ ⇒ 中心へ変更(脚が2倍速く動く)(*2)
3) 2)のロッド3アナに、ロッド5アナを被せ、2)の弱点を解消(*3)
4) タイヤLに代わり、グロメットをはめて、後ろ脚を軽量化(*4)
5) タイヤLのクランク(回転止め)に代わり、ラチェット機構(前方向のみ回転させる)を取り付けて、スーッと滑るように前進する(*5)
多数のベーシックコース修了生に相応しい、奥の深いロボットでした。
*1 力は1/3に弱くなり、モーターが力負けして停止しやすい弱点がありますので、あまり欲張れません。
*2 回転半径が半分(2アナ分⇒1アナ分)になるので、動きの幅(ストローク)が半分になり、あまりスピードアップしない弱点があります。
*3 ロッド5アナの中心を回転軸としても、回転半径を2アナ分とれ、ストロークを減らさずに脚を2倍速く動かせます。
*4 バッタらしい力強い脚ではなくなりますが、電池が弱くても動きやすいですね!
*5 これだけで圧倒的に速かったですね。4教室中、最速だったと思います。ミドルコースレベルの改造でしたが、宮田君ナイス!!
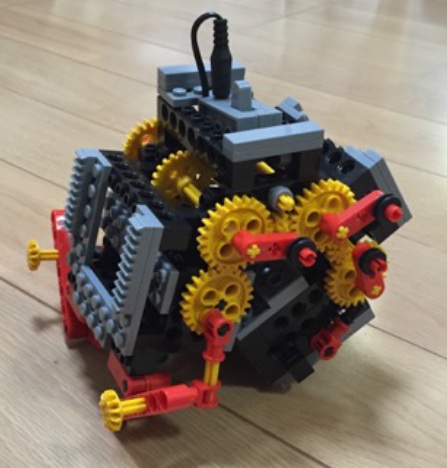
1.3 <ミドルコース『ダンゴム』> (八幡東教室 中野司先生 原著 / 佐藤 改編)
初登場の変形ロボットです。ダンゴムシのように沢山の足で歩いたり、丸まったりします。
●ロボットの動き
モーターは回転する力しか生み出しませんね。
その回転する力でロボットの足を動かし前進するのか、本体を変形させる(丸まる)のかはどこで決まるのでしょうか。
1日目のロボットは丸まらず、スイッチを切り替えても前進・後退するだけです。
(これだけでも、虫嫌いな人をゾクゾクさせるには十分な仕上がりですが)
2日目のテキストに丸まるためのミソが隠されています。
●丸まる改造
テキストに倣い、写真のようにラチェットをギアに噛ませてみました。
これでスイッチを入れると…、前に進んだり、丸まったりしましたね。
なぜ2通りの働きをするのか、皆さんは既に理解していると思います。
スイッチを一方に入れて前進するのは変わりませんが、逆方向に入れるとラチェットがギアに噛み、後退する代わりに変形するようになりました。
ここで、1つ疑問が浮かびます。
ラチェットが噛むと、そのギアは回転できなくなり、ロボットがその場に止まったまま動けなくなるだけではないでしょうか?
ちょうど車のタイヤを回らないように固定した場合のイメージです。
●力の逃げ道
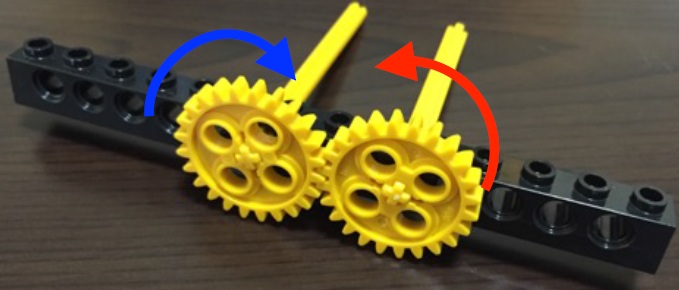
写真のように、赤矢印のギアを回した場合、隣のギアへ回転が伝わります。
青矢印のギアは回転する以外に動きようがないですね。
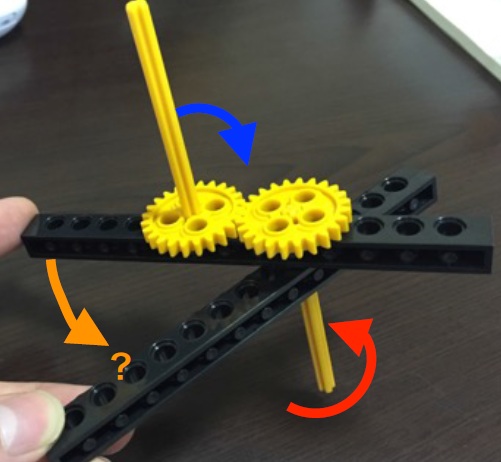
そこで、ギアの土台を変えてみます。
写真のように、ビーム2本にシャフトを1本通し、ハサミのようにクロスさせます。
シャフトにギアを通し、もう1組のシャフトとギアを上部のビーム1本だけに通して噛み合わせます。
(実際に作って体験してみることが理解への一番の近道です)
赤矢印の示すシャフトを回してみます。当然、青矢印のシャフトも回転すると思います。
同時に、なんとなく上部のビームもオレンジ矢印の向きに回転しようとしませんか?
赤矢印のシャフトを急に回そうとするほど(*6)、オレンジ矢印のビームもつられて回りやすいと思います。
この場合、赤矢印の回す力は、青矢印のギアを回すか、オレンジ矢印のビームを回すかの2通り、“逃げ道”があるわけです。
力の逃げ道がいくつかある場合、より簡単に動かせる(抵抗が小さい)方に逃げます。
その結果、青矢印のギアが回ったり、オレンジ矢印のビームが回ったりします。
回しやすさ(抵抗)が同程度の場合は、両方とも回ることになります。
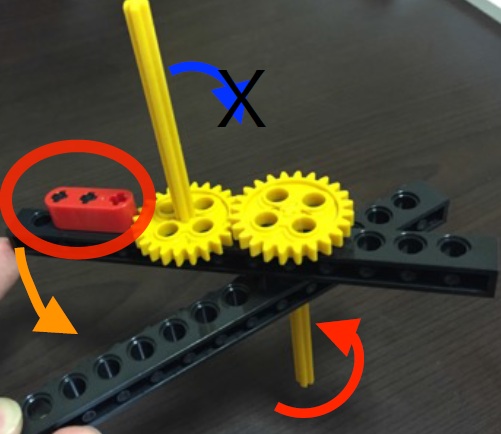
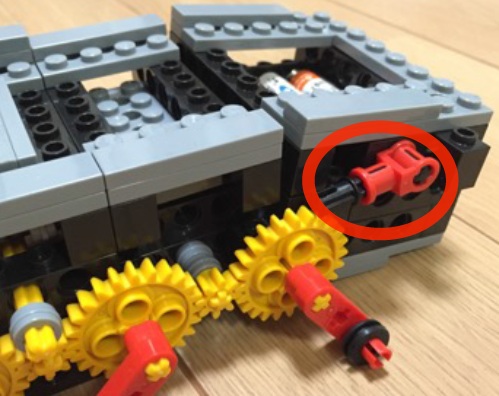
ここで、力の逃げ道の1つを閉ざすとどうなるでしょうか。
写真の赤丸のように、ストッパーを取り付けてみました。
このストッパーの役割は、ダンゴムの(ギアと噛んだ)ラチェットと同じで、接触しているギアを回らなくしています。
この状態で、赤矢印のシャフトを回してみてください。
上部のビームをオレンジ矢印の向きにダイレクトに回転させる感じがすると思います。
なぜそうなるのでしょうか?
赤矢印の力の逃げ道として、ストッパーを破壊して青矢印のギヤを回すより、ビームを回した方がはるかに楽(抵抗が小さい)ですね。
その結果、青矢印のギアを回すことなく、ビームを回すことに専念するのです。
これがダンゴムを後退させるか、丸めるかを分かつ仕組みの原理です。
8月の『サカアガリン』、7月の『シュート君』にも使われていますよ。
●丸まる仕組み
力の逃げ道がダンゴムの変形にどのように作用しているのかを見ていきましょう。
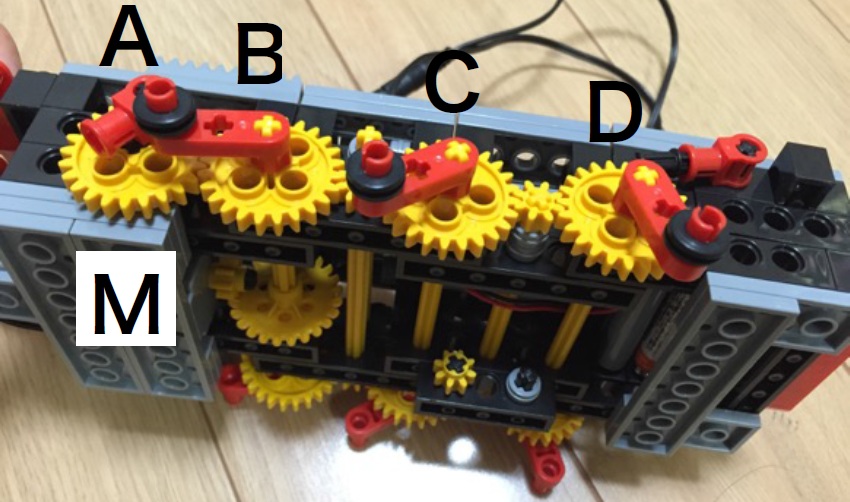
モーター軸(ピニオンギア)をM、側面のギアMを左からA,B,C,Dと名付けます。
ギアDに注目すると、これはラチェットにより回らなくなっています。
全てのギアは噛み合っていますので、このままではモーターMは回転できません。
ここで何が起こるでしょう。力は“逃げ道”を常に探しています。
スイッチを入れると、ピニオンギアMは回転しようとしますが、ラチェットにより固定された一連のギアを回すことはできません。
代わりに、モーター(頭部)自身が赤矢印の向きに回ることで、ピニオンギアMがべベルギアの周りを回ることができますね。
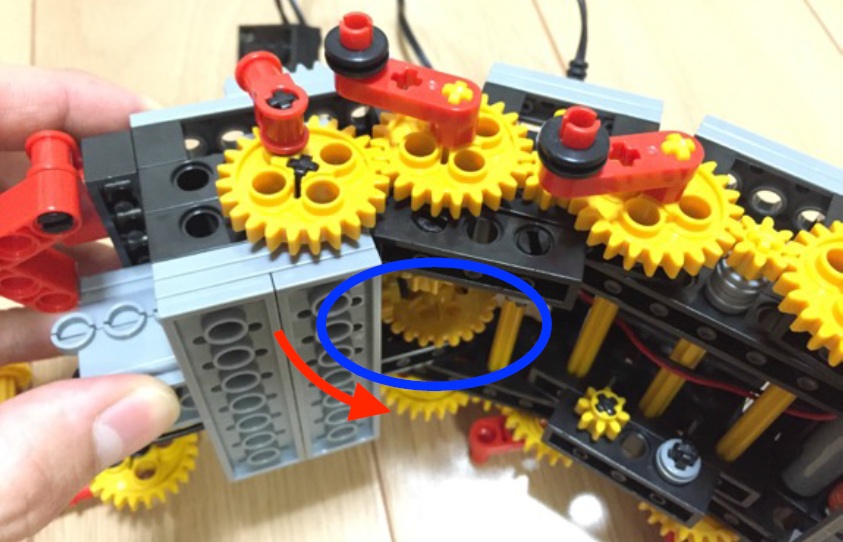
ある程度までモーター(頭部)が回転すると、写真の青丸のように、ダンゴムの頭と胸のパーツ同士がぶつかってしまい、回転できなくなります。
逃げ道は他にないでしょうか?
実験した2本のビーム同士のように、頭⇔胸以外にも、胸⇔腹、腹⇔尻の間に、折れ曲がる関節がありますね。
これらが折れ曲がることで、ギアAはBの周りを、BはCの周りを、CはDの周りを回る仕事ができ(*7)、その結果、ダンゴムは丸まっているのです。
さて、ダンゴムが丸まる仕組みは以上ですが、丸まる動作に不必要なギアがあります。
それは、ギアA,B,C,Dのうち、どれを指しているでしょうか?
ダンゴムは、3つの関節で分けられた頭・胸・腹・尻の4部位それぞれに、ギアA,B,C,Dが取り付けられ、関節の両側のギアが互いの周りを回ろうとする(*8)力で折れ曲がっています。
だから、一見無駄がなさそうですが、この力の伝達に寄与していないギアがあります。
つまり、それを外しても丸まる動作に影響はありません(*9)。それはどれでしょうか。
そのギアの記号と不必要な理由、そのギアの別の役割を考えてみてください。
*6 物体を素早く加速させようとするほど、それを妨げようとする抗力が大きくなり、その分、大きな力を要します。慣性の法則といいます。
*7 実際は、回転方向を整えるために、間にピニオンギアを介していますが、関節を挟んだギア同士が互いの周りを回る作用としては同様に考えられます。
*8 どちらがどちらの周りを回っていると考えるかは、基準(カメラの設置場所=動いていないと感じる方)によって変わる相対的なものです。
*9 ギアA,B,C,Dは両側面にあることに注意してください。両側セットで考えます。
1.4 <ロボプロコース『不思議アイテム(3)』>
不思議アイテムの世界も、最終月を迎えました。
1日目は、“ラーメンタイマー”を作ります。
時間を計る(というより休め!の指示)命令としては delay がありますので、所望の時間だけ静止した後、ブザーでも鳴らせば一先ず完成ですが、経過状況も知りたいのが人情です。
delay(1000) と命令する度に何かをすれば、1秒毎の経過が分かります。
delay(100) を10回繰り返して、0.1秒単位のカッコイイ表示もできます。
秒数を2桁の数字で表したければ putd2、大きな1文字を表示したければ putch、任意の大きさで円や四角を描画したければ circle や rectangle、1ドット光らせたければ write、1音を鳴らしたければ play、メロディを奏でたければ play_rtttl、モーターを回したければ rotate等、いろんな命令が紹介されています。
サンプルプログラムでは、タッチセンサーの入力検出に listen と onPress、繰り返しに for や while、条件分岐に if や switch-case を使って、初めに秒数やアラーム方法を選ばせる実用的タイマーに仕上げていました。
中には「ピッ、ピッ」と音を発しながら10秒からカウントダウン表示し始める、その名も時限爆弾の CountBom もありました(*10)。
最終日の2日目は、ちょっと遊んで一息つくのにふさわしい「人工生命とシンセサイザー」がテーマでした。
人工生命といっても、8x8ドットのそれぞれを生命体(細胞=セル)になぞらえ、周囲の生存セル数に依存した単純な規則によって誕生・生存・死滅を世代展開していく様子を観察して楽しむものです。“ライフゲーム”と呼ばれます。
それの何が面白いといって、“カオス的”なのです。簡単なルールで動いているのに、先行きが読めないのです。
初期状態のちょっとした違いが全く異なる結果を生み、にわかには予測不可能なパターンを繰り広げます。
ここから(*11)、生命現象や神経回路網の再現、人工知能の研究へと発展していきました。
コンピュータの登場がこのような楽しみと学問の道を開いたのですね。
シンセサイザーの方は、先月の“電子ピアノ”を改造したプログラムです。
無線リンクしたゲームパッドのボタンが鍵盤になっている点は変わりませんが、アナログスティックを倒す量に応じて周波数を増減させる、エフェクター(ピッチシフター)機能が搭載されました。
プログラム上では、“play(NOTE_C4 + effect)”のように、音程を表す記号 NOTE_** にスティック傾倒量 effect を足しています。
“ド”に数値を足すって、どういうことでしょうか?
先月の1日目に学びました。音程記号は、プログラムの転送前(コンパイル時)に音の周波数に置き換えているのです。
例えば、440Hzの“ラ”ボタンを押しながら、+54相当分スティックを前に倒せば494Hzの“シ”に、-48相当分スティックを引けば392Hzの“ソ”に変わる、という具合です。
デジタルの世界では、すごく簡単な計算で豊かな効果を演出できる、という一例です。
ロック・ギタリストにでもなった気分で、ブイブイ演奏してみましょう。
ここまでで、もう、光と音を自在に操れる魔法を手に入れたようなものです。
*10 ジョーク・プログラムなのですが、むき出しの配線や電子基板の中で赤いLED数字がカウントダウンを始めると、かなり物騒な雰囲気を醸し出します。
テロが心配される国では冗談どころか、誤解から自身を危険に晒すことになるでしょう。
日本でも、公共の場でいたずらに利用するのは厳に慎みましょう。警察沙汰になるか、配線が切断される被害(?!)に合うこと請け合いです。
*11 ライフゲームそのものというより、上位概念のセル・オートマトンと呼ばれる格子状セルで構成した計算機モデルから。
2. 今月の課題
次回授業日までに完了してください。◎は必須、○は推奨、△は任意です。○△は能力に応じます。
<スタートアップ/プライマリーコース>
特にありません
<ベーシックコース>
△(難解につきスケッチ免除)
○ 上記授業内容を分かるまで音読する
(概ね3年生以上/低学年は補助 or クイズ出題形式で)
<ミドルコース>
△(難解につきスケッチ免除)
◎ 上記授業内容を分かるまで音読する
<プロフェッサーコース>
◎ 上記授業内容を分かるまで音読する(該当するテキストページを見ながら)
◎ [CountTimer4]をベースに、LEDドットパターンで経過秒数が分かるタイマーを作る(1日目)
Lv.1 8個の点を順次点灯または消灯させる8秒タイマー
Lv.2 60個の点を順次点灯または消灯させる60秒タイマー(ヒント:%演算子)
Lv.3 表示方法を独自に工夫した3分間(180秒)タイマー
◎ [TonePS3/4/5/6]をベースに、音程を“CDEFGAB”に代わり、
“どれみふそらし”と分かり易く表示
3. 今後の授業スケジュール
[東福間]第1・3土
- 10:30~ ロボ・ミドル/アドバンス
- 13:30~ ロボ・ベーシック/プライマリ
10月は10/1, 15です。11~1月も原則通りの予定です。
[東福間プロ]第2・4日
- 9:45~ ロボ・プロ1年目
- 13:00~ ロボ・プロ2年目
10月は10/9, 23です。11・12月も原則通り、1月は1/15, 29の予定です。
[中間]第2・4土
- 13:30~ ロボ・ベーシック/プライマリ
- 15:15~ ロボ・ミドル
・10/ 8 第1回 2F会議室1
・10/22 第2回 3F会議室2
11~1月も原則通りの予定です。
[小倉北]第1・3日
- 10:00~ ロボ・ベーシック/プライマリ
- 13:00~ ロボ・ミドル
- 15:00~ ロボ・ベーシック/プライマリ第2部
・10/ 2 第1回 5F小セミ
・10/16 第2回 5F小セミ
11・12月も原則通りの予定ですが、11月はムーブイベントの為、
代替施設『商工貿易会館(シティプラザ)』での開催となります。
1月は1/8, 22の予定です。
[小倉南]第2・4日【振替専用教室として試験運用スタート】
in 総合農事センター(小倉南区横代東町1-6-1)
by 中野司先生
- 10:30~ ロボ・ベーシック/プライマリ
- 13:00~ ロボ・ミドル
・10/ 9 第1回 なし
・10/23 第2回 2F B研修室
振替希望はなるべく1週間前までにお願いします。
指導リソースが限られますので、所定コースのみお受けします。
11月以降も原則として第2・4日曜日に開催予定です。
振替手数料540円/回をご負担下さい。
4. お知らせ
1) ロボット教室全国大会ビデオ8/20(土)に東京大学で開催された第6回全国大会が『キッズステーション』で放送されました。
https://www.youtube.com/watch?v=q6OeL6fhNR0
ナレーション音声が消えておりますが、出場者のレベルの高さが感じられます。
もしくは、関連動画からダイジェスト版をご覧下さい。
2) 電池交換
消耗した電池でロボットが動かないと訴える生徒さんが多く、診断&交換で製作・進行が滞ります。
10月より、原則として電池代4本108円+診断料108円を加算させて頂きますので、
自らの責任で学習してもらうべく、下記の準備をお願いします。いずれも100円ショップで入手できます。
- 市販のバッテリーチェッカーを購入し、自ら残量を管理する
- なるべく充電池を用い、毎回充電してくる
3) 宿題ポイント導入(東福間・中間・小倉北・八幡東教室)
形骸化しがちな図面スケッチですが、億劫な気持ちは良~く分かります。
自主的に楽しく取り組んでもらえるよう、10月~オリジナルのスケッチお題を作成し、配布することにします。
毎月の授業まとめに則した課題も掲げますので、Blog読者未登録の方は招待メールをご用命下さい。
提出物ごとに1~5ポイント色カードを進呈し、ポイント交換用景品を用意します。
4) スライドスイッチ改造サービス
今年に入り“改良”されたはずのスライドスイッチで、断線事故が多発しております。
新品は高価で、また断線しますので、教室独自の強化改造サービスを始めます。
断線時は、原則として下記※を適用させて頂きます。
・バッテリボックス新品 572円: 問題ありません(故障時は買い替え)
・スライドスイッチ新品 789円: 問題はこちら (お薦めしません)
・スライドスイッチ改造※ 0円: 純正品⇒改造品への初回交換時
・スライドスイッチ修理※ 780円: 改造品の断線時
※スイッチ本体を破損・紛失している場合は、原価代789円を加算
小学生の使用を前提としない設計で、本部に強いクレームを申し入れております。
純正品が断線してもお子さんを叱らないで下さいね。
(モーター、タッチセンサー、改造品が断線するようなら、扱いが荒いです)
5) 小倉南教室(仮称)の来春開校に向けて
これまで、特に小倉北教室(日曜日)へお通いの方には、振替体制の不足を申し訳なく存じておりました。
八幡東教室 中野司先生に、小倉南区での日曜日開校を検討頂いております。
正式な開校・場所の決定まで今暫く時間を要しますので、当面、振替専用教室として試験運用スタートします。
10/23(日)~原則として第2・4日曜日に開催予定です。
正式開校・転属までは振替手数料540円/回をご負担下さい。
東福間・中間・小倉北教室 佐藤