2.今月の課題
3.今後の授業スケジュール
4.お知らせ
1. 6月授業内容
1.0 <スタートアップ>
割愛します。
1.1 <プライマリーコース『アルペンくん』>

割愛します。
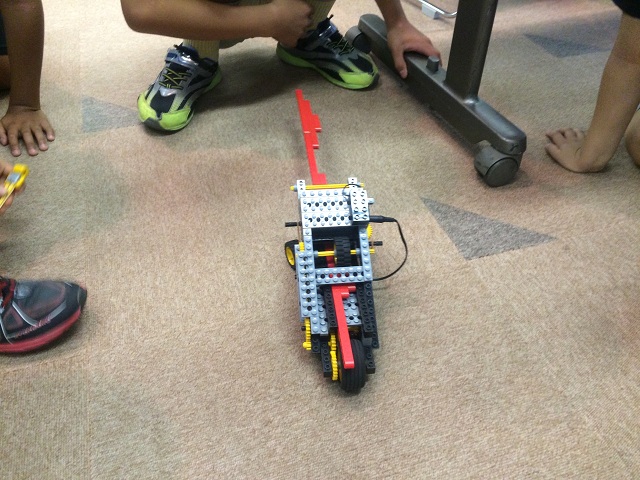
1.2 <ベーシックコース『がたごとレスキュー隊』>
救助ロボットです。

1日目では、何の変哲もなさそうな4輪車に留まりましたが、車体底面の地上高(自動車用語でロードクリアランス)が低いため、少しの段差で引っ掛かってしまい、がたごと道はとても無理のようですね。
それでも、ちょっとした工夫があるのです。それはスピードが“遅い”ことです。
ギアボックスをよく観察してみましょう。
モーター軸のピニオンギア(歯数8)が先ずベベルギア(歯数24)を回し、続いてベベルギアと同軸(つまり等速)のピニオンギア(歯数8)がギアM(歯数24)を回しています。
タイヤはこのギアMと同軸(等速)です。
歯数8のギアが歯数24のギアを回す構成が2段ありますので、1段目で1/3に減速、2段目でさらに1/3に減速することになり、モーターの回転を1/3×1/3=1/9に減速してタイヤを回しています。
つまり、モーターが9回転してタイヤがやっと1回転する遅さです。
遅いだけなら、何のメリットがあるのでしょう?
実は回転する力(トルク)が9倍になるという恩恵があるのです。
試しに、タイヤを外したシャフトを手でギュッと摘まんでみてください。
大人でも止められない程に強力ですよ。レスキュー隊として頼もしい力強さが準備できました。
2日目では、ロードクリアランスの問題を解決します。
もっと大径のタイヤを装着できればよいのですが、タイヤLで最大ですので、代案が必要です。
そうです、タイヤSをクロールする手のように装着するのは、瞬間的に地上高を上げる効果も狙っているためです。
バタバタと騒々しいですが、これで多少の凹凸は乗り越えられるようになりました。

あとは、4脚の取り付け方向ですね。
4脚とも揃えるのか、左右は揃えて前後でずらすのか、全てを90°ずつずらすのか。
後者ほど、いずれかの脚が地面を掻いている期間が長く、推進効率に優れそうですが。
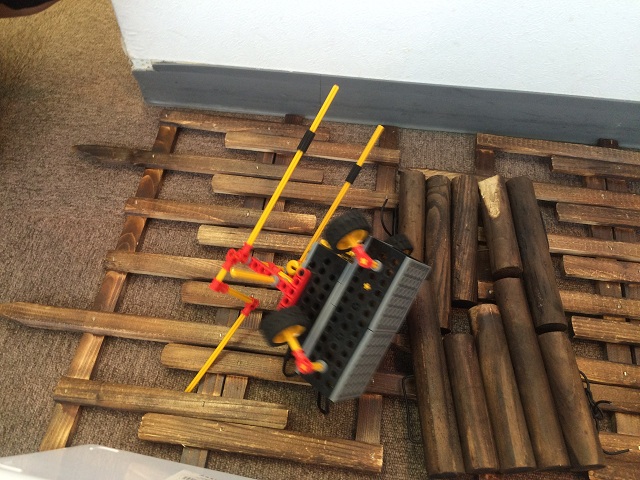
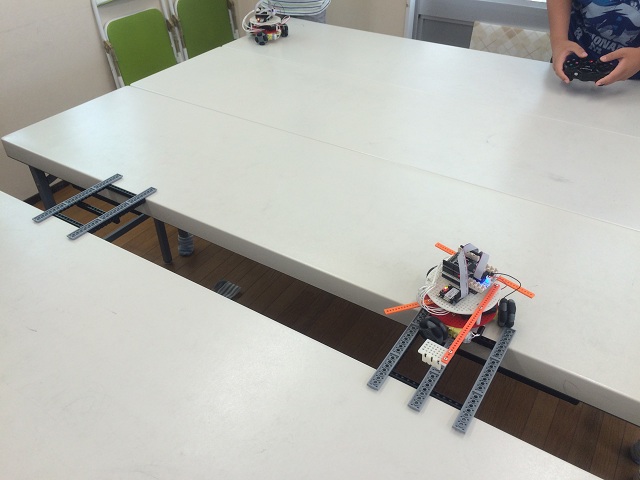
最後の競技は、がたごとレース!
がれきに見立てた木材を敷き、成功率20%の難関コースを乗り越えて救助に向かえるかどうかを競います。

丸太を前に立ち往生し、脚がもげるなど、「救助隊が必要な救助隊」が多い中、4脚の向きを全てずらしたロボットの成功が目立ちました(*1)。
4脚とも揃えたロボットでは、どの脚も着地していない間に、せっかく乗り上げた丸太を底面で滑り下りてしまいました。
左右または前後の2脚ずつ揃えたロボットでは、丸太に乗り上げて傾いた胴体をさらに傾かせ、転覆するか、でんぐり返っていました。

ただ、路面の起伏や摩擦状況により最適な構成が変わり得ますので、脚を揃えるのが常に不利と思わないようにしてください。
激しい凹凸を乗り越えるだけなら、4脚一斉に胴体を持ち上げた方が有利のはずです。
その後、胴体着地する間に滑り落ちないよう工夫すれば最強かもしれません。
*1 胴体と干渉(かんしょう)しないようクリアランスを確保しつつタイヤLに換装(かんそう)するなど、独自の工夫を凝らして走破した人もいました。
1.3 <ミドルコース『プログラミングカー』>
“プログラミング”と“カー”にそそられます。
“カー”だけに製作も理解も難しくはありませんが、生みの親で、アイデアコンテストで最優秀賞に選ばれた当時小学6年生に脱帽です。
他のロボットでも、本体の製作時に動作をプログラミングする要素はありますが、本体(ハードウェア)とプログラム(ソフトウェア)媒体を明確に分離した点で、唯一無二のロボットです。
プログラムとは何でしょう。一連の動作や演目などの手順(表)ですね。
本体の設計を変更することなく、プログラムだけで動作を決定できる利点があります。
ゲーム機やアプリのアップデート等が最たる活用例ですね。
コンピュータ類に限らず、テレビ、エアコン、冷蔵庫、洗濯機、炊飯器まで、現代の殆どの電気製品がプログラムに則り動作しています。
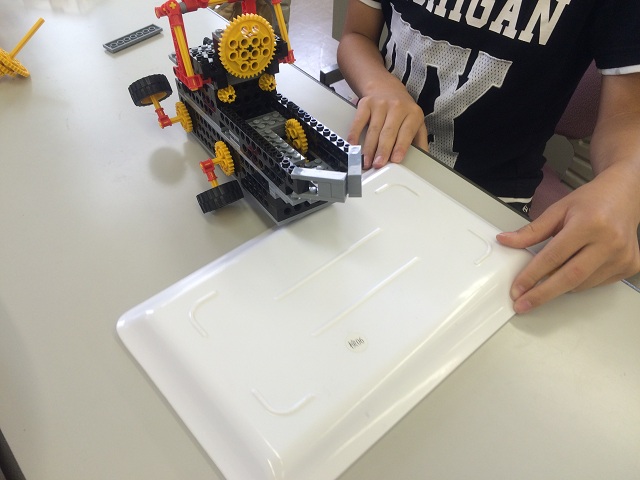
本ロボットのプログラム媒体は、赤いロッドを繋ぎ合わせた一本の棒で、その幅(1~3本分)により、右折・直進・左折を指令します。
走行用モーター動力をプログラムロッドの送り用ローラーにも分配しているところがナイスです。
黎明期のコンピュータも、パンチカードと言って、無数のパンチ穴を開けた何十メートルもの紙を送ってプログラムやデータをセーブ・ロードしていましたが、その様を彷彿とさせます。
また、ロッドを円形に組めば無限ループを実現でき、永遠とジグザグ走行や8の字走行を繰り返すこともできます。

2日目最後の競技に、三角コーンやテープで指示されたジグザグコースを無事に完走するプログラムを設計してもらいました。
このとき、試行錯誤を重ねながら仕上げるのも現実的な成功方法なのですが、計算によって一発成功を狙う科学的方法も追求して欲しいと思い、1日目に余力のある人に挑戦状を掲げました。
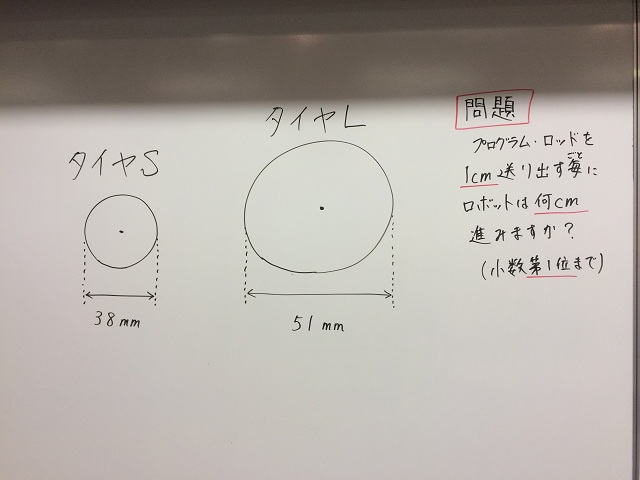
【お題】
ロッド1穴分(約1cm)送る毎にロボットが何cm進むか?(小数第1位まで)
ただし、ロッドを送るタイヤS直径を38mm、本体を推進させるタイヤL直径を51mmとする。
【解答】
タイヤSとLの1回転あたりの移動距離(変位)の比は、円周長の比であり、これは直径の比に等しく、38:51である。
ここで、ギア構成により、タイヤLの回転数はタイヤSの3倍である。
よって、タイヤLによる変位は、タイヤSに比して 3×51/38≒4.026倍となるので、
本ロボットは、ロッド1穴分(約1cm)あたり約4.0cm進む。
実際は、各所のスリップの影響により誤差が出ますが、例えば、55cmのロッドでは220cmのコース取りをプログラミングできるという“アタリ”が付けられるようになり、最初から成功に近づける可能性が高まるのです。
算数/数学が得意な人は、円周率3.14やπ(パイ)を持ち出して面倒な計算をしても同じ答が出ることを確認し、比を用いた考え方を深めてください。
1.4 <ロボプロコース『オムニホイールロボット(3)』>
オムニホイールロボットの3ヶ月目、最終月です。
知的ロボットに必要な「感じて」「考えて」「動く」機能のうち、先月までは「考えて」「動く」だけでした。
いや、「考える」といっても、定めたプログラム通りに動くだけで、せいぜい次の動作に移行する秒数を計っているだけでした。
想像してみてください。いくら“脳ミソ”があっても、外界との接点が無ければ(目も耳も鼻も触覚さえも!)、意識は闇の中…。息が詰まりそうですね。
1日目では、「感じる」触覚を与えます。
丸い本体の前部(頭部?)に左右のタッチセンサーを取り付け、そこから針金(触角?)を2本伸ばします。まるでテントウムシですね。
針金に何かが触れると、タッチセンサーがONになって…、どうなる?
それはプログラム次第ですね。ここが本コースの面白いところです。
右の触角に触れるとちょっと後ずさり、左の触角に触れると旋回するなど、自由に設計できます。
これだけでも、ロボット掃除機を想わせる動きになります。
どうです?あのスゴイ家電の動作も、こんな感じで実現できてしまうのですよ!
自ら判断して動いてくれるので、生物のような賢さや可愛らしさが出てきます。
これを実現するプログラミング要素を学びました。
“もし、○○だったら△△して、そうでなければ××する”ような判断と行動のルールを与えるもので、“if ○○ { △△ } else { ×× }”の形式で記述します。
条件分岐といって、プログラムには大切な要素です。
これがなければ、ゲームソフトも紙芝居がせいぜいです。
最終日の2日目は、ラジコン操縦プログラムを転送して、「考える」賢さをコントローラ操縦者に委ね、パイロン走行や『恐怖の鉄橋渡り』、しまいにサッカー対戦など、教室ロボカップを開催して走らせ回りました。


この過程で、プログラムの条件分岐を使用して、高速走行モードに入るボタンが決められていることを悪用(?)して、パラメータを改造したり、さらに禁断の“スピードリミッタ解除”にまで及んだ人もいましたが(*2)、机上では速すぎて落下の恐怖が付きまといましたね(*3)。
以上、3ヶ月にわたり、オムニホイールの走行原理やプログラミングの基礎を学びました。
特に、同じボタンやタッチセンサーでも、押されてどう反応するかはプログラム次第であるという点が、従来のロボット教室パーツにはない新鮮な体験だったと思います。
次回以降のテーマでも、マイコンに様々な判断と命令を担わせて、面白いマシンを製作して参りましょう。
*2 実際の自動車でも、そういうことが(やろうと思えば)できます。エンジン/モーターの最大パワーは変わらないものの、アクセル操作に対する応答特性を変える走行モード切替が付いている車もあります。
*3 実際、落下→分解→修理が続出しました。反省…。
2. 今月の課題
次回授業日までに完了してください。◎は必須、○は推奨、△は任意です。○△は能力に応じます。
<スタートアップ/プライマリーコース>
特にありません
<ベーシックコース>
○ 4面図スケッチ(専用方眼紙)
○ 見取図スケッチ(テキスト最終ページ/難しければ写真の模写から)
○ 上記授業内容を分かるまで音読する
(概ね3年生以上/低学年は補助 or クイズ出題形式で)
<ミドルコース>
△(長尺につきスケッチ免除)
○ ロッド1穴分(約1cm)送る毎にロボットが何cm進むか計算する(1日目)
◎ 上記授業内容を分かるまで音読する
<プロフェッサーコース>
◎ 上記授業内容を分かるまで音読する
◎ サンプルプログラム[Sensor3]をベースに、テキストp.23フローチャートのアルゴリズムを実現する(1日目)
3. 今後の授業スケジュール
[東福間]第1・3土
- 10:30~ ロボ・ミドル
- 13:30~ ロボ・ベーシック/プライマリ
7・9・10月は原則通り、8月は7/30, 8/20の予定です。
[東福間プロ]第2・4日
- 9:45~ ロボ・プロ1年目
7・9・10月は原則通り、8月は8/7, 28の予定です。
[中間]第2・4土
- 13:30~ ロボ・ベーシック/プライマリ
・7/ 9 第1回 2F会議室1
・7/23 第2回 2F会議室1
7・9・10月は原則通り、8月は8/6, 27の予定です。
[小倉北]第1・3日
- 10:00~ ロボ・ベーシック/プライマリ
- 13:00~ ロボ・ミドル
- 15:00~ ロボ・ベーシック/プライマリ第2部
・7/ 3 第1回 ※部屋変更
10:00~ 5F小セミ
※13:00~ 4Fサポータールーム
※15:00~ 4Fサポータールーム
・7/31 第2回
10:00~ 5F小セミ
13:00~ 5F小セミ
15:00~ 5F小セミ
プライマリは幼児向け6ヶ月コースです。
7月はムーブフェスタの為、7/3, 31です。7/15はありません!
8月は原則通り8/7, 21ですが、8/21は代替施設『商工貿易会館(シティプラザ)』での開催となります。
9・10月は原則通りの予定です。
4. お知らせ
●全国大会(既報)
6月授業でベーシック・ミドルコースのアイデアコンテスト全国大会の案内冊子を配りました。
オリジナルロボットを考案し、7/21(木)九州本部必着にて、所定の応募用紙・プレゼン動画(3分以内)を提出します。
ベーシック・ミドル部門別で選抜しますので、ほぼ1回ずつのチャンス!
何人か試作動画を送ってくれ、アドバイスもしております。有志は果敢に挑戦して下さい。
8/20(土)に東京大学で開催の第6回ロボット教室全国大会は、生徒さん・ご家族を優先に、下記HP上で観覧申込みもできます。7/4(月)正午~受付開始です。
http://kids.athuman.com/robo/event/convention/2016/
●オリジナル電子工作講座
八幡東教室の中野先生と協力し、ロボット教室→プロコースの間を繋ぎ、コンピュータ制御の基礎となるデジタル回路を学べる電子工作講座を開講します!
先ずは年に数回の不定期開催とし、来年より定期のシリーズ講座化を目指します。
【対象】
ロボット/プロ/理科実験教室に通う小4~高校生 1日8組16名(保護者同伴可)
【日時】下記いずれか一日
・8/10(水) 9:30~15:00
・8/22(月) 9:30~15:00
【会場】
北九州イノベーションギャラリー(KIGS) 工房(スペースワールド駅 徒歩5分)
【工作名/タイトル】
『RCドレミ ~限定版~』/「鉛筆一本で音と光を操ろう!」
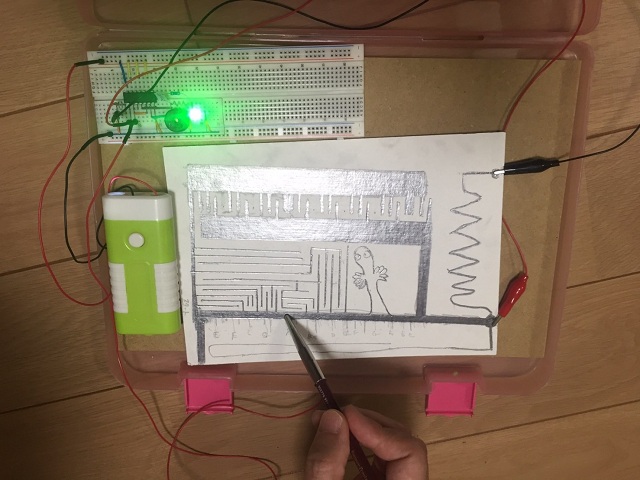
【内容】
電子部品と発振回路の原理を実験を通して学び、身近な物をオルガン鍵盤にしてしまうガジェットを製作して遊びます。
【参加料】
7,500円(受講料5,400円+材料費2,100円)
【講師】
中野 司・佐藤 誉夫
【申込方法】
7月授業でチラシを配布し、7/20~メールにて募集、7/27決定(抽選)します。
ご反響メール歓迎します!
【申込条件】
・原則として、8月お引落し額(9月分)に加算して徴収させて頂きます。
キャンセル・欠席により空席が発生した場合は返金できません。
(キットと製作テキストのみお渡しします)
・別途、KIGS主催イベントとしても実施予定ですが、KIGS決定に則り参加料が異なります。(一般参加の公平性のため、ご案内しません)
今回の講座(限定版)は、内容・部品においてKIGSイベントと差別化を図っており、電子工学の道に目覚める運命(!?)の生徒さんに強くお薦めします。
・学習の場につき、同伴者は保護者1名のみ(任意・途中退場可)とし、受講生以外のお子様はご遠慮下さい。
●TV出演情報
プロコースのアドバイザー 千葉工業大学 未来ロボット技術研究センター所長 古田貴之先生がTV出演される予定です。是非ご覧下さい。
7月3日(日) 21:00~23:09 フジテレビ系列「Mr.サンデー」
http://www.fujitv.co.jp/mrsunday/index.html
東福間・中間・小倉北教室 佐藤