2.今月の課題
3.今後の授業スケジュール
4.ひと言
1. 2月授業内容
1.0 <スタートアップ/プライマリーコース>
割愛します。
1.1 <ベーシックコース『リトルドッグ』>
愛犬ロボットと銘打(めいう)つ、4足歩行ロボットです。
側面で同じ向きに回転する4枚のギアL上に打つペグ(回転軸)の位置だけで、4足を運ぶタイミング(*1)をそれぞれ変えられるので、4足の運び方による進み方の違いを観察するのにうってつけの教材です。
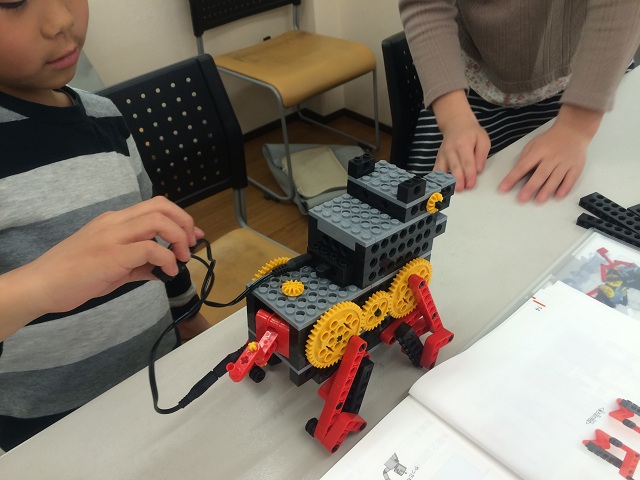
1日目の製作を終えた段階では、うまく歩けない子犬が続出しました。
特に、左右で足の動きが同じだと、おかしな仕草(しぐさ)になります。
回転するような屈伸運動になり、まるでEXILE風ダンスか、100円で前後上下に動く乗り物のようです。全く進みません。
4足の運びに正解が決まっているわけではなく、重心やスピード、足の跳ね方(浮き具合)によって変わりますが(*2)、まずは左右も前後もタイミングを90~180°ずらしてみましょう。

片足ずつ、後ろ足のゴム(グロメット)で上手に地面を蹴ることができれば進むでしょう(*3)。
うまくいけば、トコトコと愛らしい小走りが見られます。
電池が弱いとヨボヨボの老犬に見えました。
*1 位相(いそう)と呼び、角度 0~360°で表します。
*2 同じ動物(犬)でも、スピードによって4足の運びを何種類も使い分けていることがテキストp.21のイラストで分かります。
*3 足を後方へ運ぶ瞬間が速くなるようなスイッチの向きに入れます。テキストp.16, p.18とは逆のようです…。
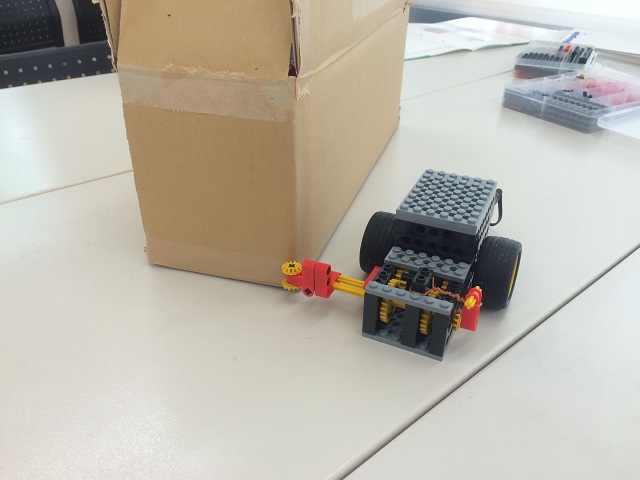
1.2 <ミドルコース『ウォールフォロワー』>
壁伝いロボットという意味です。
右回り専用ながら、前方の右側面から生えたガイドバー(昆虫っぽいので、触角と呼びます)が段ボールなどの壁面を正確にたどりながら周回します。
「単にずっと右に曲がろうとしている結果じゃない?」
そういう声も上がりました。
確かに、あまりにうまく壁を伝うので、そういう風にも見えます。
まるで、ICチップで周回路を認識した自律型ロボットみたいです。
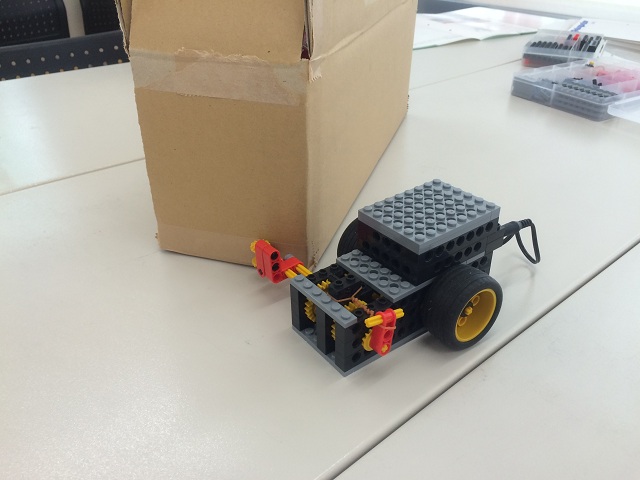
実際のところ、このロボットは、左タイヤはずっと回転したまま、右タイヤを回転させたり止めたり制御することで、直進と右旋回の2つのモードを自動的に切り替えているのです。
制御機構は、壁面に押されて引っ込んだり、壁面から離れると輪ゴムの弾性力で元の位置まで出っ張ったりする触角が、右タイヤへの動力を断続させるクラッチレバーのような働きを担うことで実現しています。これは面白い!(*3)
輪ゴムの掛け方が強すぎると、まっすぐな壁を沿うにも右旋回モードが解除されず、壁に正面を向けて行き詰まるか、触角を擦り付けるようにたどたどしく進みました。
逆に弱すぎると、直進モードから右旋回モードに移行しにくくなり、コーナーを過ぎても直進し続けるか、反応が鈍くて大回りしてしまいましたね。
自重(接触した壁面が触角を押し込める力に関係する)と走行スピードに見合った輪ゴムの弾性力が、壁面への追従性を決めていました。

最後の競技は、名付けて『ウォールフォロワーGP』!
開いた段ボールをひし形に潰して床に固定し、鈍角と鋭角コーナーのでき上がり!
右回りに周回するタイムを計測します。
直角(90°)や鈍角(>90°)はスマートに曲がれても、鋭角(<90°)ですぐに曲がるとタイヤが引っ掛かってタイムをロスします。
輪ゴムを緩めに掛け、少し遅れて大回りする方が早く曲がれるというのが、セッティングの要なのでした。
正に『急がば回れ』!
*3 このロボットを初めて見た佐藤も感心しましたが、同様に工学畑(オタク?)の講師陣3名も本アイデアに唸ることしきりでした。機械式の単純なメカニズムで高度な制御を実現する“機能美”にくすぐられているのです。センスある君も感動したよね!?
1.3 <ロボプロコース『不思議アイテムII(2)』>
センサー類を駆使する、冬タームの2ヶ月目です。
1日目のテーマは、「ベースロボットの組み立て」です。
何のことはない、左右両輪(2モーター)を独立駆動して、前進・後退・左右旋回を自在にこなす土台のロボットを製作します(*4)。

戦車型ラジコンプログラム[Tank]を転送して操縦したり、決まったコース(円・四角・8の字など)を自動的に走らせることはできますが、まだセンサー類が無いので、外界からの入力情報を基に“考える”ことはできません。
2日目のテーマが、「カラーセンサーロボット」です。
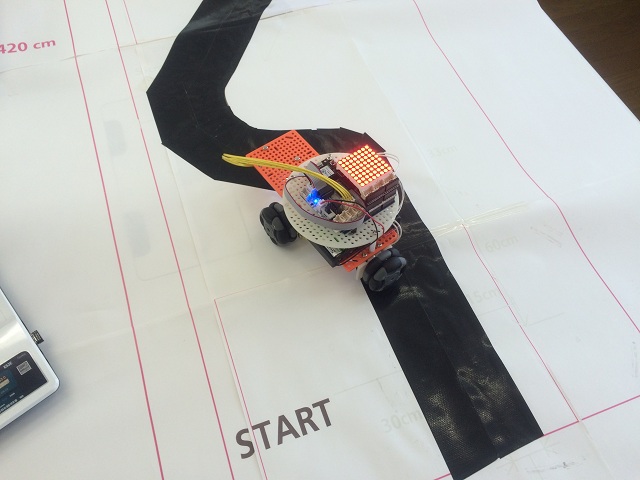
その1つ目は、「ライントレーサー」です。
カラーセンサーを下向きに取り付け、地面の明暗(白黒)情報だけを処理し、黒いライン(の縁)をたどるロボット[Tracer]に仕立てます。
「白なら右へ、黒なら左へ」旋回するように片輪を交互に駆動する制御方式は、アドバンスコースのテクニカルコンテストと同じですね。
マイコンが認識する明度(明るさの数値)は、環境光や反射率はもちろん、センサーの個体差、電源電圧(*5)にも左右されるため、各々が白地と黒ラインとで数値をモニタリングし、その中間値を閾(しきい)値として設定する必要がありました。
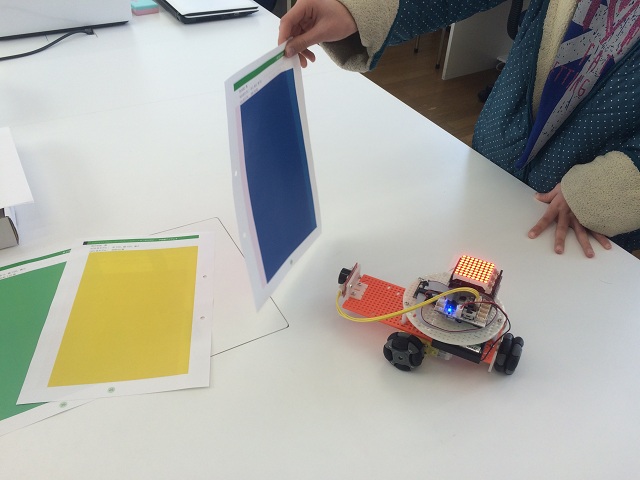
2つ目は、「カラートレーサー」です。
カラーセンサーをヘッドライトのように前向きに取り付け、前方景色の色相(色味)情報だけ(*6)を処理し、特定の色に向かうロボット[ColorTracer]に仕立てます。
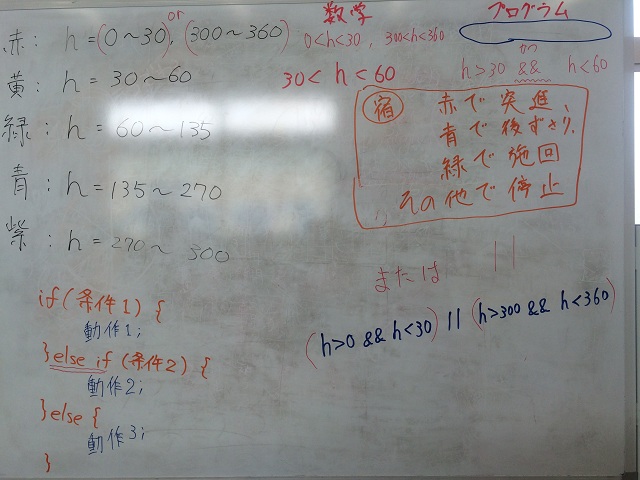
サンプルプログラム中、色相 h を使って“if(h>180 && h<270) {前進せよ;} else {停止せよ;}”となっています。
これは、数学的には 180°<h<270°のことで、色相環(先月第2回テキストp.12)で確かめると“青”ですね。
“緑”なら“if(h>60 && h<150) …”くらいでしょうか。
“赤”は難しいです。2つの変域 0°≦h<30°, 300°<h<360°がありますので、『もし(hが0以上 かつ hが30未満)または(hが300超 かつ hが360未満)ならば』のように論理的に記述しなければなりません。
“if( (h>=0 && h<30) || (h>300 && h<360) ) …”となります(*7)。
走り方(タイミング、スピード、軌跡など)に変化をもたせて、好きな色を見ると近づいて行く愛らしいロボット(闘牛?)に仕上げてみましょう。
“鳴く”と面白そうですね。
最終月は、「ウルトラソニックロボット」で今タームを仕上げます。
*4 これだけで普通の自動車(1エンジン)を遥かに凌駕する自由度を獲得できるのですから、将来は電気自動車に替わっていくわけです。
*5 パソコンからのUSB給電の場合と、電池駆動とで数値が変わるという…盲点でしたね。
*6 1ドットカメラなので、人間なら瞼(まぶた)を瞑(つむ)ったまま外光の色を感じるようなものです。
*7 論理積(AND)演算子 && は、論理和(OR)演算子 || より優先順位が高い(先に演算される)ので、“if(h>0&&h<30||h>300&&h<360)…”と続けて書いてもOKですし、h=0~359の値しか取らないので、実は“if(h<30 || h>300)…”だけでもOKです。
2. 今月の課題
次回授業日までに完了してください。◎は必須、○は推奨、△は任意です。○△は能力に応じます。
<スタートアップ/プライマリーコース>
特にありません
<ベーシックコース>
○ 4面図スケッチ(専用方眼紙)
○ 見取図スケッチ(テキスト最終ページ/難しければ写真の模写から)
○ 上記授業内容を分かるまで音読する
(概ね3年生以上/低学年は補助 or クイズ出題形式で)
<ミドルコース>
◎ 4面図スケッチ(専用方眼紙)
○ 見取図スケッチ(テキスト最終ページ)
◎ 上記授業内容を分かるまで音読する
<プロフェッサーコース>
◎ 上記授業内容を分かるまで音読する
◎ カラートレーサープログラム[ColorTracer]を改変し、
赤(好き!)へ突進、青(怖い!)からはゆっくり後ずさり、
それ以外では停止するロボットに仕立てる
《ハイレベル挑戦》さらに、緑(臭い!)で旋回する動作を足せるかな?
【注意】色は色相 h で表し、赤:h<15 or h>315、青:195<h<255、緑:75<h<135 等で与えます。動作を足すほど不意に動き回って危険ですので、特に後退時はスピードを抑え、忙(せわ)しすぎる場合は反応する色相範囲を狭めて(停止範囲を広げて)下さい。
3. 今後の授業スケジュール
[東福間]第1・3土
- 9:00~ 理科実験・中級
- 10:30~ ロボ・ミドル
- 13:30~ ロボ・ベーシック
3~6月まで原則通りの予定です。
[東福間プロ]第2・4日
- 9:45~ ロボ・プロ1年目
3・4・6月は原則通り、5月は 5/15, 29 となります。
3/13は佐藤が出張の為、新下関教室 百合野先生、八幡東教室 中野先生が授業します。
第2期生スタートアップは、3/19 9:00-11:00 です。
[中間]第2・4土
4月~振替教室として供用予定です。
[小倉北]第1・3日
- 10:00~ ロボ・ベーシック
- 13:00~ ロボ・ミドル
・3/ 6 第1回
10:00~ 4F和室 (ベーシック)
10:00~ 5F企画2(プライマリ/スタートアップ)
13:00~ 5F企画2(ミドル)
・3/20 第2回
10:00~ 5F小セミ(ベーシック/プライマリ/スタートアップ)
13:00~ 5F企画2 (ミドル)
プライマリは幼児向け6ヶ月コース、スタートアップは初月コースです。
3・4・6月は原則通り、5月は 5/8, 22 となります。
4. ひと言
土曜日の教室が4月新規開講します。・中間教室 第2/4土 13:30 他(なかまハーモニーホール/佐藤)
・八幡東教室 第1/3土 13:30 他(レインボープラザ/中野司先生)
中野先生は時々ムーブに来てくれる先生です。勿論、振替協力します。
なかまハーモニーホールは、広い無料駐車場がやっぱり楽ですよ~。
(ホールイベント時は満車になりますが)
振替・転属ご希望は随時ご相談下さい。
東福間・小倉北教室 佐藤