2.今月の課題
3.今後の授業スケジュール
4.ひと言
1. 1月授業内容
1.0 <スタートアップ/プライマリーコース>
割愛します。
1.1 <ベーシックコース『横綱ロボ』>
力士ロボットです。1日目で基本形の製作は完了するものの、足を運ぶ度にヨタヨタと左右に上体を揺らし、足裏はツルツルと滑ります。
まるで慣れないスケートリンクで立ち往生する初心者のような、何とも頼りない横綱です。
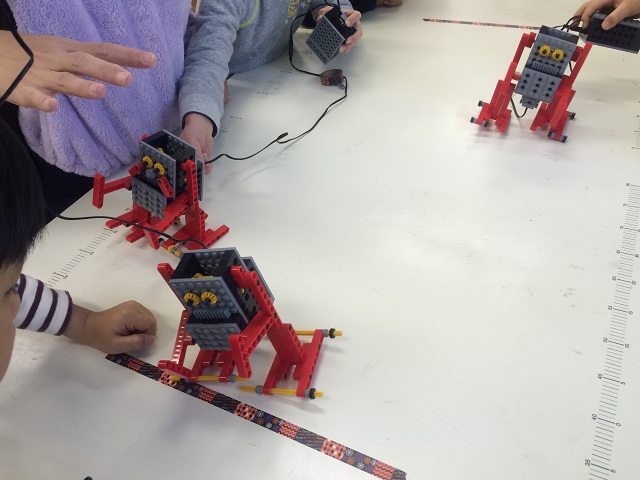
2日目にはシャフトを通して足幅を広げ、輪ゴムやグロメット(ゴム管)で摩擦力を稼ぎ、ようやく大地を掴(つか)んで歩む勇ましさが出てきました。
途中、重たいモーターを低い位置に取り付けた基本設計を変え、脚をひょろ長くして重心を高くしてみましたが、
背が高くなって貫禄(かんろく)は上がるものの、転びやすくなって、相撲取りに大事な安定感はいまいちとなることも試しました。
力士が腰を低くして取り組むのも、重心を下げて倒れにくくするためですね。
2日目最後の競技は、当然、相撲試合です!
土俵に見立てた丸椅子の上で両者をにらみ合わせ、「はっけよーい、のこった!」
どれも似たような動きしかしていないように見えて、テキストや先生の話をヒントに改良したロボットの方が強い結果を残す一方、
弱々しい力士は、バランスが悪くて勝手に転ぶか、足がツルツルですぐに相手に押し出されていました。
見た目の飾り付けばかりに気を取られ、太い眉を付けて“目力”を上げたり、立派なちょんまげを結っても強くはならないですよ。
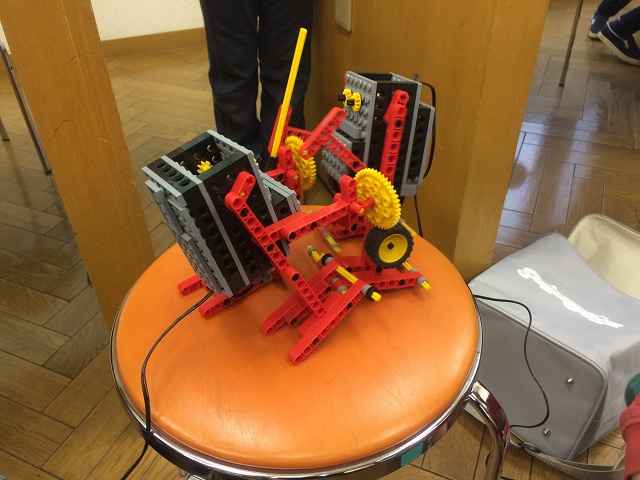
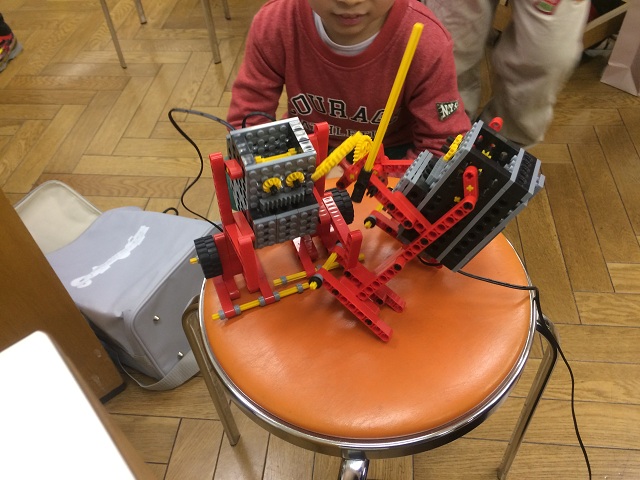
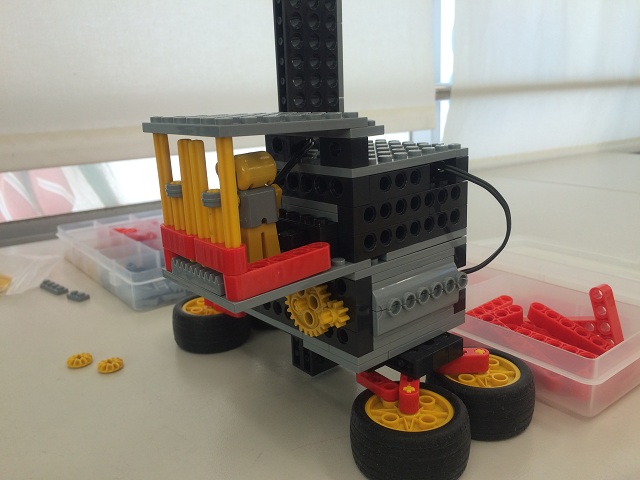
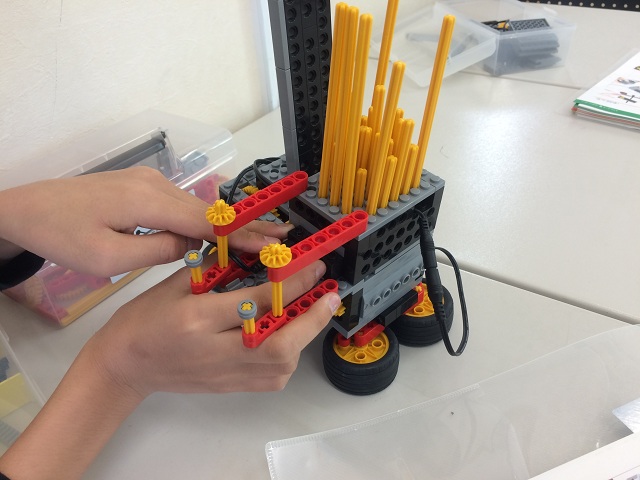
1.2 <ミドルコース『ロボベーター』>
今回はエレベーター! 時々登場する「ロボットというよりも…」シリーズで、毎回とても面白く感動モノです。
製作難易度は高くなく、学習ポイントもさほど高度ではないのですが、
このキットでエレベーターを考案し、アイデアコンテスト全国大会で最優秀賞を獲得した当時小学4年生のアイデアに脱帽です。
見た目としては、エレベーターのかご(運動部位)が水平から少し傾いてしまいますが、
このことにより、駆動ローラー(タイヤ)をレール柱に押し付け、滑らないように摩擦力を稼ぐことができるのです。
このために、かごの重心を一方(モーター搭載側)に偏らせているとも言えます。
かごの重心バランス次第で、好みの摩擦力に調整できるということでもあります。
実際のエレベーターとは方式が異なることも学習しましたが、それは知識であって、
実物を模さないことで何より大事な創造力をいかんなく発揮したことが推し量れます。
1日目では、下降し終えて床に付いてもモーターは唸りを上げたままになり、
上昇し終えると柱から外れて落下するという、“恐怖のエレベーター”!
実物なら絶対に乗りたくありません。
2日目でようやく、タッチセンサーの働きにより、地上でも頂上でも自動停止する安心エレベーターになりました。
実物でも、年を追うごとにセンサー類が多くなって安全性が高まっています。
最後の競技は、一部で品評会としました。その前に、プレゼン(テーション)ですね。
各自で改造や装飾をしたロボベーターの動作を見せ、機能や工夫点をアピールしてもらいます。
皆さん、発表に慣れていないようです。
各人に1分ずつ与えましたが、このような段になると急に押し黙ること!
「特にないです」「いや、普通に…」って、そんな筈はありません。
確かに、テキスト通りに製作しているだけでは、それが最終目的になって、随所にある工夫点に気付かない面があります。
オリジナルの設計を疑問に感じて、改変して、失敗して、成功して、新たな知見を築いていって欲しいと思います。
1.3 <ロボプロコース『不思議アイテムII(1)』>
3ヶ月間の多脚リンクロボットを終え、新しいタームに入りました。
1ヶ月目は、マイコンの入出力として、音と光を操ります。
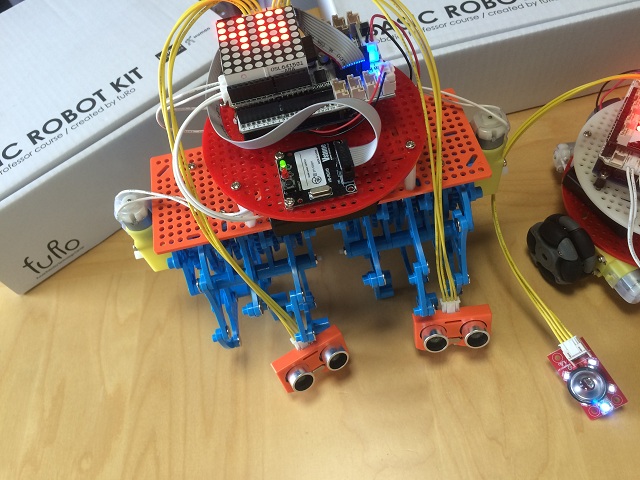
1日目のテーマは、「超音波距離センサーを使う」です。
超音波とは、人間の耳には聞こえない、概ね20kHz以上(*1)の高い周波数の音を指します。
自然界では、イルカ、コウモリ等の生物が利用し、人工物では、犬笛や、魚群探知ソナーが代表的な利用例です。
利用目的としては、コミュニケーションと対象物・距離感知(反響定位/エコーロケーション)に分けられますが、今回のはセンサーですので、後者の方です。
知ってはいても、実際に活用したり、制御したりしたことは無かったでしょう。
超音波センサーが感知した障害物までの距離をLEDマトリクスに表示するプログラムを試したところ、センサーの個体差が大きく、遠方に向けても40cm前後を行き来する不安定なものから、安定して90cm超まで正しく判定するものまで、特性にばらつきが目立ちました。
安定したセンサーに恵まれた人の使命として、“泥棒アラーム”など、実用性の高い電子機器に仕上げてみてください。
ここで、超音波で距離を計測する仕組みを理解したでしょうか。
目玉のような2個セットの円筒は、同じように見えて(*2)、一方は超音波を出すスピーカで、他方は反射音を拾うマイクです。
340m/秒で音が伝わる空気中において、1/1000秒後に反射音をキャッチしたら、対象物までの距離は 0.34m÷2=17cm ですよ。
1日目の最後は、“テルミンもどき”プログラムで遊びます。
超音波センサーが捉えた距離 dist を用いて、“play(dist*20, …)”と記述すれば、22cmのときにラの音(440Hz)を出し、手を近づければ低く、遠ざければ高い音に変化させることができます。

テルミンとは馴染みのない楽器だったでしょうが、空中の手の位置で音程を操る点は共通です(*3)。
超音波センサーは2つ繋いでいますので、1つは音程用で良いとして、もう1つは実物と同じく音の大きさを変えたいところ、その能力は無いので、音の間隔の変更(連続音~断続音)を司らせています。
こうすることで、音の停止(聞こえないほど小さくする代わりに、間隔を無限にあける)を実現しています。
2つのセンサーが担う機能をいろいろ変えて(*4)、面白い楽器に仕立てて遊んで欲しいと思います。
2日目のテーマは、「色で遊ぶ」です。
カラーセンサーボードを接続して、フルカラーLEDを任意の色に光らせたり(出力)、カラーセンサー(1ドットカメラ)で外光を撮影したり(入力)できることを確かめました(*5)。
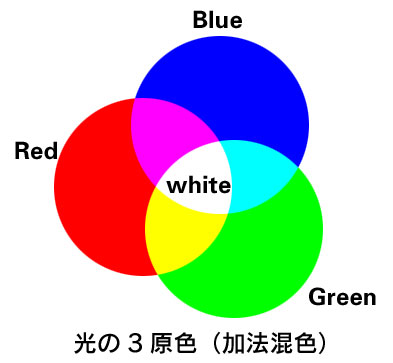
ここで、全ての色は“光の3原色”の混ぜ合わせで作り出せることを実験しました。
テレビ等の映像ディスプレイに採用されているRGBカラー方式の元になる原理です。
昔のパソコンが、モノクロ画面に代わり、カラー表示能力をもったばかりの頃は、赤・緑・青の各色を1ビット(0/1)信号だけで制御したため、2×2×2=8色(デジタルRGB)表示から始まりましたが、メモリやCPU性能の向上に伴って、2ビット64色、3ビット512色、4ビット4096色、6ビット26万色と多色(アナログRGB)表示が進み、現在は8ビット1677万色(フルカラー)が標準です。
ここで、各原色(R・G・B)を多ビットで駆動するということは、例えば2ビットなら4階調(0%, 33%, 66%, 100%)の明るさで光らせることであり、その制御方法として、下記の2方式があることを学びました。
A) アナログ方式 - 階調に応じた電圧や電流値に変える
B) デジタル方式 - 高速な0/1信号波形の時間幅の割合を変える
今回のフルカラーLED表示にも使われている B)方式をパルス幅変調(PWM)方式と呼び、マイコンやプログラムとの親和性が高いので、デジタル制御回路において多用されています。
ところで、色の再現方法には、RGB色モデルの他にも、色味(色相H)・鮮やかさ(彩度S)・明るさ(明度V)を指定して表すHSV色モデルもあり、これらの3次元色空間モデルのいずれでも同一色を表現したり、相互に変換したりできます。
最後に、“光の3原色”について、付け加えておきました。
3原色と言われると、物理学的に赤・緑・青が全ての色の元となる“純色”であって、黄や紫などは“混色”に過ぎないとの錯誤に陥りそうですが(8人中5人)、
実は、人間の視覚の都合による決め付けに過ぎません。

人間の網膜には、赤・緑・青の光(波長)に“良く”反応する3種の視細胞(赤錐体・緑錐体・青錐体)が高密度に分布しており、
この錐体の興奮度合い(電気信号)が視神経を通して脳の視覚野に伝わり、その組み合わせ次第を“勝手に”色として感じているのです。
テレビやカメラがRGB方式を採るのも、この視覚特性に由来しており、
人間が「実際の風景を忠実に再現した」と感じる4Kハイビジョン映像も、他の生物や宇宙人の目には、実物とは随分異なる映像色に映るかもしれません。
また、赤と緑の間の単波長光が目に入っても、赤錐体と緑錐体の両方が弱く反応して「黄色」と感じます。
つまり、人間は、黄色に感じる光が赤と緑の混合なのか、単色光(*7)なのかを区別できません。
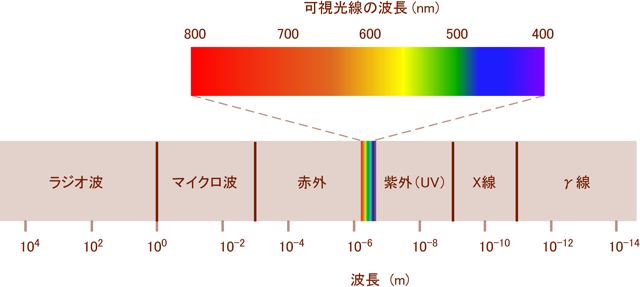
もっと言うと、0.01nm以下から100,000,000,000,000nm(百km)以上の波長まで連続的に存在する電磁波のうち、400~800nmの可視光というごく狭い帯域に人間の視覚が割り当てた“色”という概念は、まやかしに過ぎないのです(*8)。
閑話休題し、2ヶ月目は、カラーセンサーを利用したトレーサー(追跡)ロボットを組み立てます。
*1 授業中、“耳年齢”アプリを使って、何kHzの音まで聞こえるか試してみましたが、悲しいかな、中年の先生には15kHz辺りが限界でした。10代の皆さんには18kHz以上まで聞こえるようですが、先生にとっては既に超音波の域です…。
*2 いや、実は同一部品でしょう。スピーカ(出力)とマイク(入力)は、モーターと発電機の関係に似て、原理的に同じ構造です。パソコンやオーディオ用のイヤホンも、マイク端子に挿して話しかけると、立派にマイクとして働きます。
*3 実物は、アンテナと手との間の静電容量の変化を、発振周波数(音の高さ)の変調に利用しています。
*4 やり尽くされて、他にできることが無い? 独創性が足りない証と考えるべし。
*5 LED発光および撮影自体はフルカラーRGB色モデルで処理していますが、サンプルプログラム ColorSensor1/3 や OneDotCamera[Average] 中では、一旦HSV色モデルに変換し、彩度(S)と明度(V)の情報を捨て、色相(H)のみを残して再生するため、視覚とは異なる色に写りますが、色味としては正しいと信じましょう。
*6 サンプルプログラム ColorLED2 で各色を100段階に調整できることからすれば、7ビット(128階調)209万色相当なのでしょうか。
*7 オレンジ1色のナトリウムランプ(単波長590nmの光)が照らすトンネル内の世界では、もはや「色」は存在しないのです…。
*8 この世の物質にも“色”という実体は無く、単に電磁波の波長ごとの反射率や吸収率の違いによる波長分布(スペクトル)の変化と、感覚器官による勝手な解釈があるに過ぎません。
2. 今月の課題
次回授業日までに完了してください。◎は必須、○は推奨、△は任意です。○△は能力に応じます。
<スタートアップ/プライマリーコース>
特にありません
<ベーシックコース>
○ 専用方眼紙にロボットの4面図をスケッチ
○ テキスト最終ページにロボットの見取図をスケッチ
(難しければ、写真撮影したものか、テキスト表紙を模写してもよい)
○ 上記授業内容を分かるまで音読する
(概ね3年生以上/低学年は補助 or クイズ出題形式で)
<ミドルコース>
×(長尺につきスケッチ免除)
◎ 上記授業内容を分かるまで音読する
<プロフェッサーコース>
◎ 上記授業内容を分かるまで音読する
○ テルミンプログラム(USSTone2/3)を超音波センサーの特性に応じて調整し、
自分好みの演奏しやすい楽器に仕立てる
◎ 色相環プログラム(ColorLED3)の改変例(配布)を試し、
右アナログスティックの傾倒量に応じてLED発光に明暗が付くことを確認する
(三平方の定理の数式利用を理解する)
○ テキストp.21チャレンジ課題のHSV→RGB色モデル変換式を考案する
(角度0~360によって決まる色相のみをRGB値0~100の比に変換する)
3. 今後の授業スケジュール
[東福間]
- 9:00~ 理科実験・中級
- 10:30~ ロボ・ミドル
- 13:30~ ロボ・ベーシック
・2/ 6 第1回
・2/20 第2回
(2/20 福津地区 土曜日授業)
(2/27 宗像地区 土曜日授業)
・3/ 5 第1回
(3/ 5 玄海東小 土曜日授業)
・3/19 第2回
・4/ 2 第1回
・4/16 第2回
・5/ 7 第1回
・5/21 第2回
[東福間プロ]
- 9:45~ ロボ・プロ1年目
・2/14 第1回
・2/28 第2回
・3/13 第1回
・3/27 第2回
・4/10 第1回
・4/24 第2回
・5/15 第1回
・5/29 第2回
[小倉北]
- 10:00~ ロボ・ベーシック
- 13:00~ ロボ・ミドル
AM/PM
・2/ 7 第1回 和室/企画2
・2/21 第2回 和室/企画2
(2/21 北九州マラソン)
・3/ 6 第1回 和室+企画2/企画2
・3/20 第2回 小セミ /企画1
・4/ 3 第1回 小セミ/小セミ
・4/17 第2回 大セミ/和室
・5/ 8 第1回 小セミ/小セミ
・5/22 第2回 小セミ/小セミ
4. ひと言
1/15放送のBS日テレ「ON&OFF」で高橋智隆先生が紹介されました。年末のイノベーションフォーラム講演で一足先に知りましたが、
「図面を描かず」「たった独りで」「外見から作る」等、
ロボット開発の常識を覆す“変人ぶり”が魅力の方ですね。
当教室の監修ロボットも、こだわりをもって設計に頭を悩まされる
様子が映し出されていました。
そうそう、「役に立つかどうか」の視点でロボット作りをしていない
とのご本人談に納得の製品が出るようです・・・その名は“ロボホン”。
2足歩行型電話? 電話型ロボット? 一般名称が何かも分からない、
新しい商品ジャンルを開拓すべく、講演でも本気でアピールされていました。
スマホが欲しい小6娘と、与えたくない親(私)との間で、
唯一交渉が成立しそうな一品ですが、まさか、20万円もしないですよね…。
東福間・小倉北教室 佐藤