2.今月の課題
3.今後の授業スケジュール
4.お知らせ
1. 4月授業内容
1.0 <スタートアップ>

割愛します。
1.1 <プライマリーコース『ロビット』>

割愛します。
1.2 <ベーシックコース『ロボート』>

ロボ・ボートの略ですね。ネーミングもさることながら、オールをこぐ動きもナイスです。
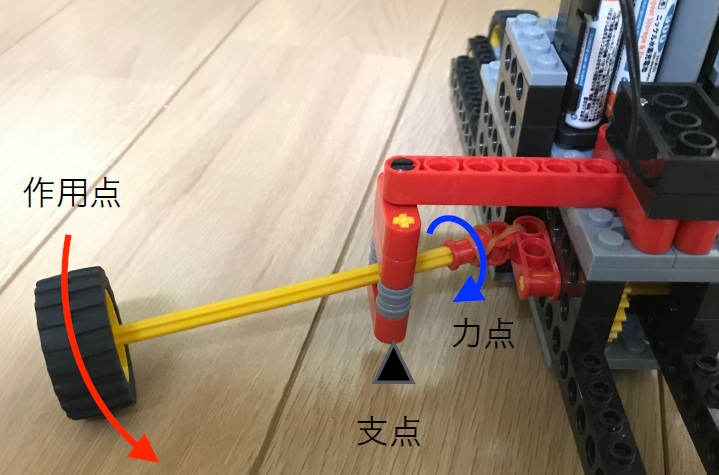
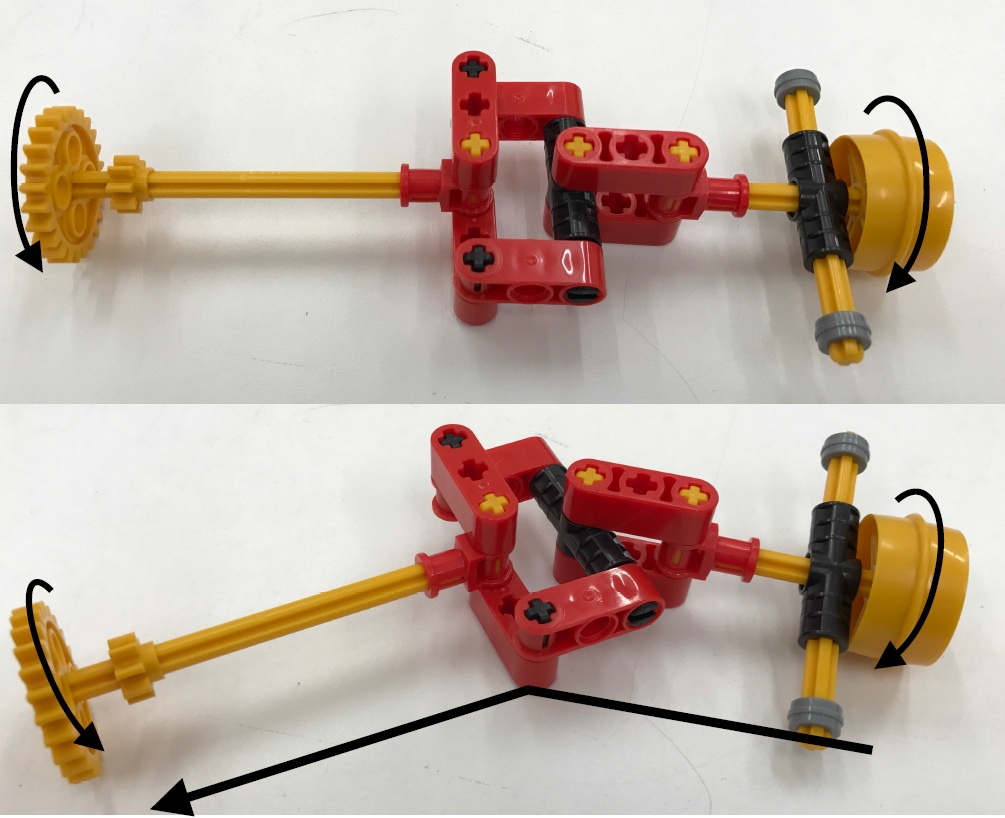
この動きは、棒の中央付近(支点)をあまり動かないように固定し、一端(力点)をこぐように回すと、他端(作用点)も同様に回る性質を利用しています。
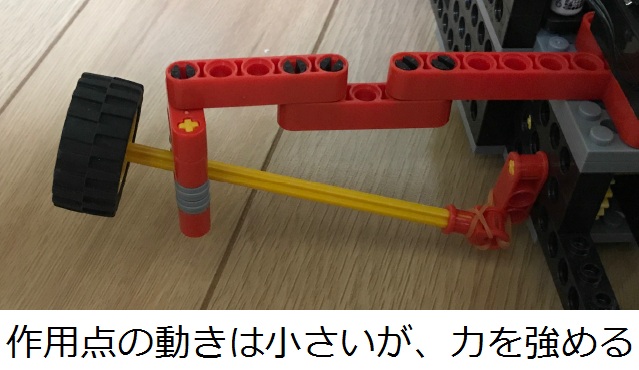

ただし、支点の位置によって、作用点の動きを大きく(速く)したり、代わりに働く力を大きくしたり、自在に調整できます。
大事なことは、速さと力の両方を増やすことはできず、どちらか欲しい方を好きなだけ増やせる(*1)ということです。
これを『てこの原理』といいます。
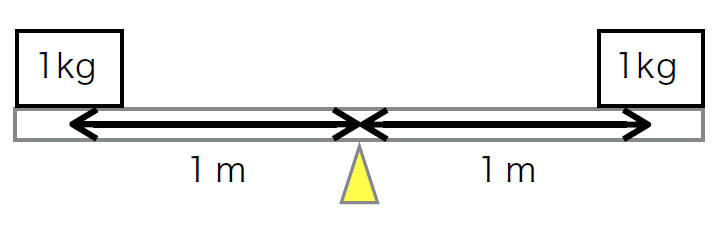
支点が真ん中にあれば、力も速さも変わらず、力点と作用点が対等に“闘う”ことができます(*2)。
天びんや公園のシーソーは、力点と作用点(区別は不要)に同じくらいの重さの物や人をのせて、バランスを取るものです。
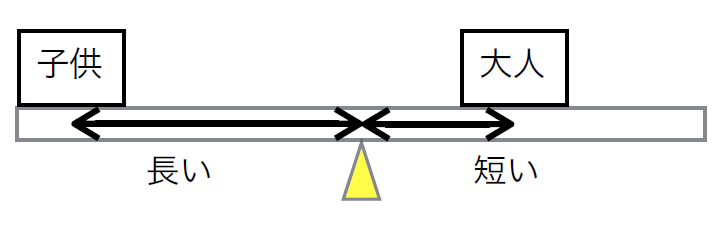
重さの異なるもの同士なら、重い方が支点の近くに寄ることでバランスが取れます。
シーソーでは、大人が中央寄りに座りますよね。
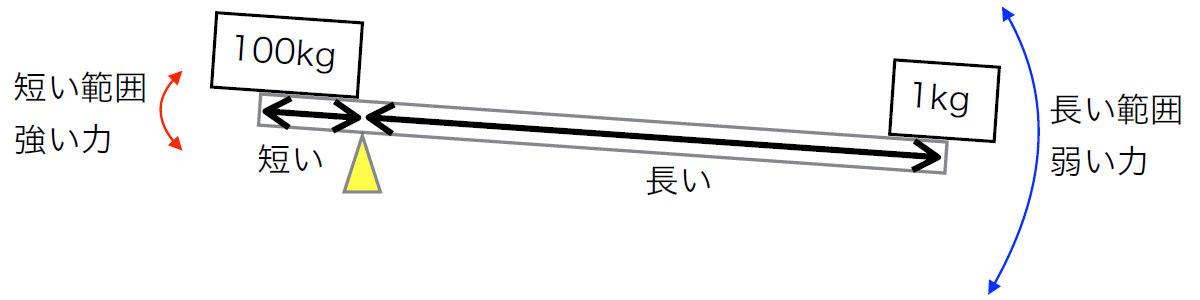
支点が作用点の方に近ければ、力点を大きく動かさないといけない代わりに、力点に加えた力よりも大きな力が作用点に働きます。
『てこの原理』と言えば、通常はこちらの利用方法を指し、ペンチや枝切りばさみ、缶切り、せん抜きなど、固いものを切ったり動かしたりする道具に利用されています。
逆に、支点が力点の方に近ければ、力点に大きな力が必要になる(重く感じるようになる)代わりに、作用点を大きく(速く)動かすことができます。
ボートをこぐオールはこちらの利用方法で、結構大きな力が要(い)る代わりに、一こぎですーっと進むことができます。
『ロボート』でも同じです。オール(シャフト)の先を延長して速く進ませることもできますが、あまり欲張っても、モーターの負担(ふたん)が増えるので逆効果でした。
オール(シャフト)の根元は、輪ゴムでクランク(*3)の先と結び、人間の手のように柔(やわ)らかく“水面”をこぐ設計もうまいです。


2日目の最後に、ボートレースでスピードを競いました。
一見どれも同じような動きに見えて、いざ地面(水面?)に放つと、速さには3~4倍以上の開きがありました。
下記の点に注意したロボートが速かったようです。
●手で押した勢い(惰性=だせい)でもスムーズに進むこと
(前後のタイヤSを手で回して、固くないこと)
●しっかりした輪ゴムでオールを留(と)める
(伸びきった輪ゴムでは何回転もねじれて先端のタイヤSに力が入らない)
●あまり欲張って、オールを長くし過ぎたり、先端をタイヤLに替(か)えたりしない
(てこの原理により、モーターが力負けして速く回せない)
*1 例えば、力を倍に増やして得をすれば、速さが半分に減って損をします。世の中、うまくできていますね。
*2 物体が静止している時、重力が働いている地球上では必ず、何か2つ以上の力が対立しながらバランスを取っています。
*3 実際に使用している部品は『クランク』ではなく『クロスジョイント』ですが、クランクと同じ作用を働かせています。
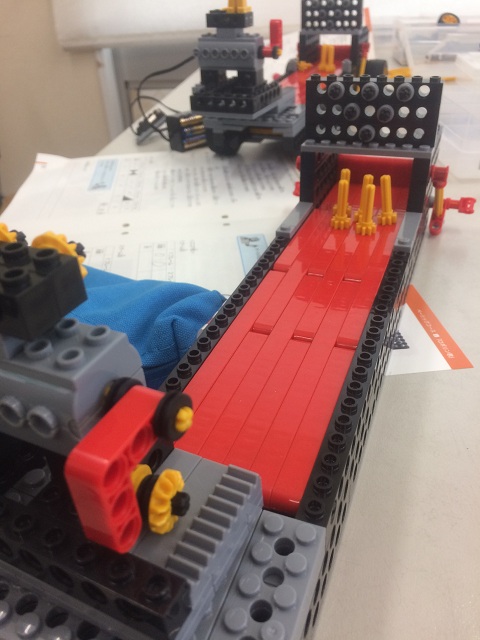
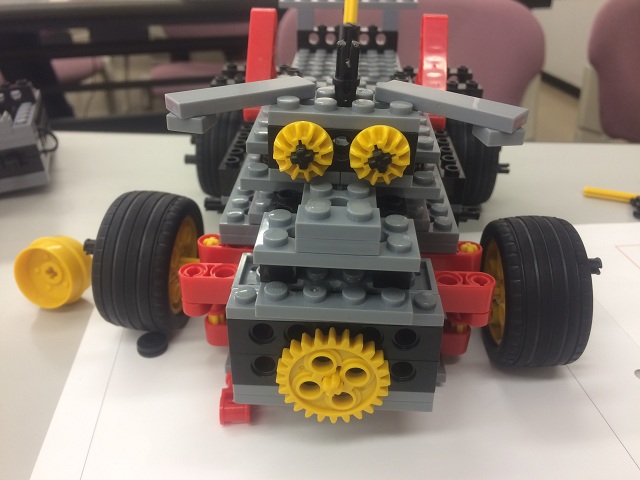
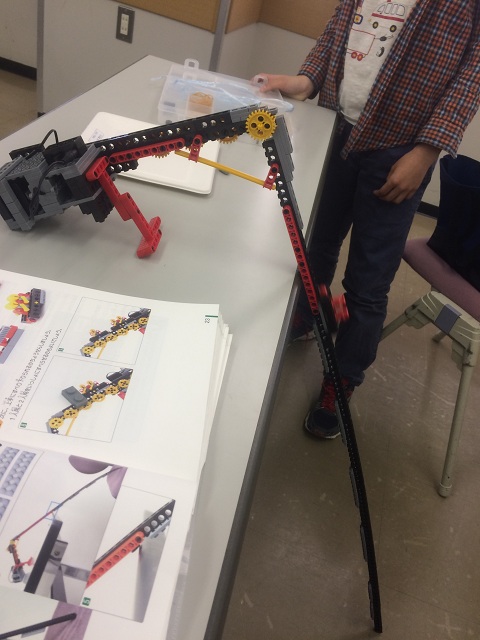
1.3 <ミドルコース『あがってゴーゴー号』>
ジェットコースターです。
必要な動力は、コースター(乗り物)を頂上まで持ち上げることのみです。あとは“下り”だけですね。
コースターを引き上げる方式として、主流なのは、地上と頂上の間を周回する長いチェーンにコースター下部のツメを引っ掛ける方式ですが、
過激なものは、圧縮空気やリニアモーターで平地から一気に加速させ、惰性(だせい)で昇らせてしまいます。(乗ってみたい…)

今回は、コースター下部のラックギアが、一列に並んで回転するギアMの上部と噛み合い、昇っていきます。
一連のギアMをチェーンと見立てれば、主流の方式に似ていますね。
1日目は、傾斜したレール上を頂上まで昇らせるところまでです。
重要ポイントは、
1) ラックギアと噛み合うギアMはすべて、
2) 同じ速さで、
3) 同じ方向に、
回転させることです。
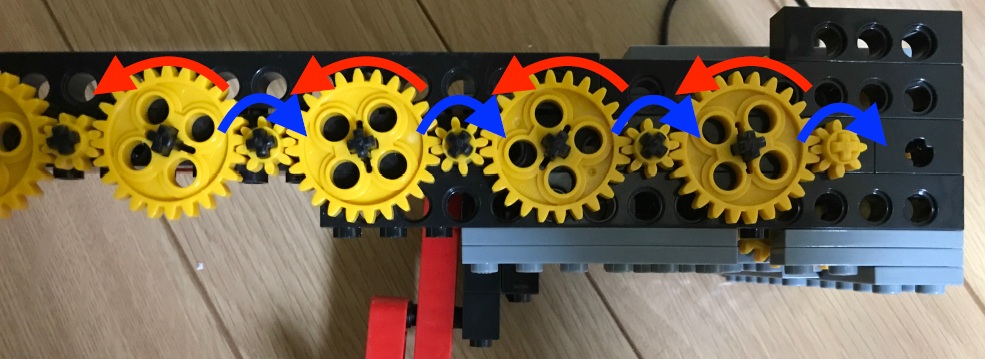
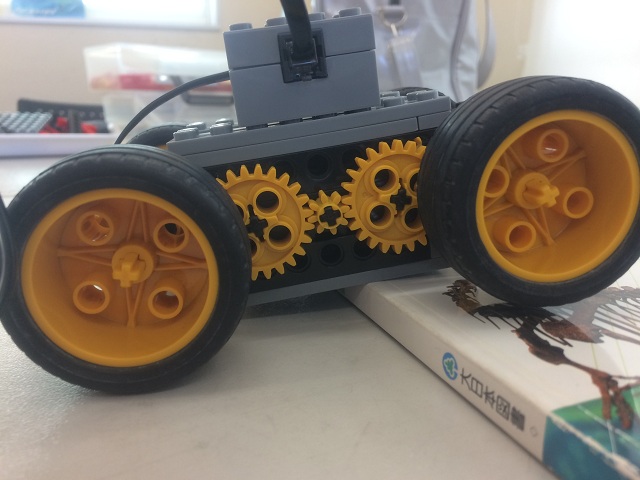
なぜ、直径の異なるギアMとピニオンギアを交互(こうご)に噛み合わせているのか?
だって、隣(とな)り合うギア同士は逆回転する宿命にありますからね。
逆回転するピニオンギアとラックギアを接触させるわけにはいきません。

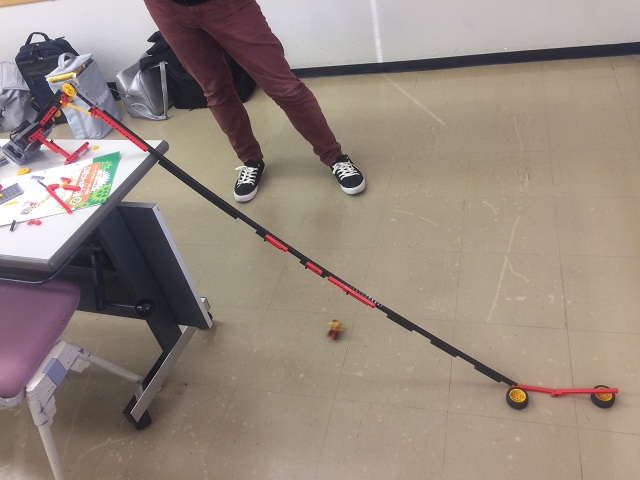
2日目は、下りのレールを付け足しました。
乗り物としては、これこそが醍醐味(だいごみ)ですものね!
小さい部品を駆使して、頂上部を滑(なめ)らかに形成します。
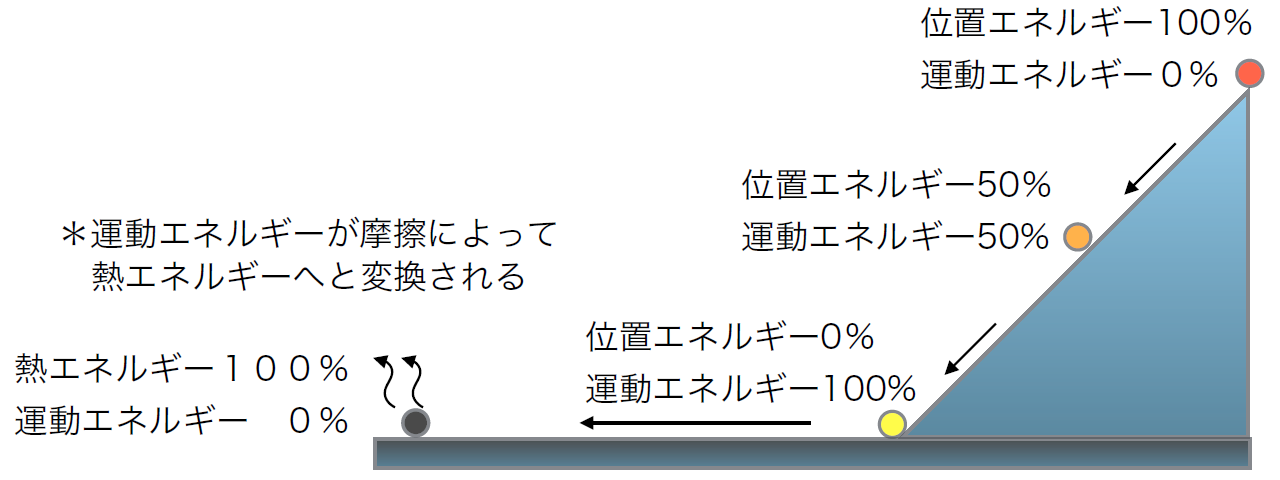
下りながらスピードが増すのは、物理学的に言えば、頂上で満タンになった位置エネルギー(高さ)が、下るにつれて運動エネルギー(速さ)に変わっていくからです。
最下点では位置エネルギーが最小、運動エネルギーが最大です。
その後、机の上をしばらく滑走し、摩擦で机とコースターを僅(わず)かに暖めながら止まります。
位置エネルギー ⇒ 運動エネルギー ⇒ 熱エネルギー へと変換されました。
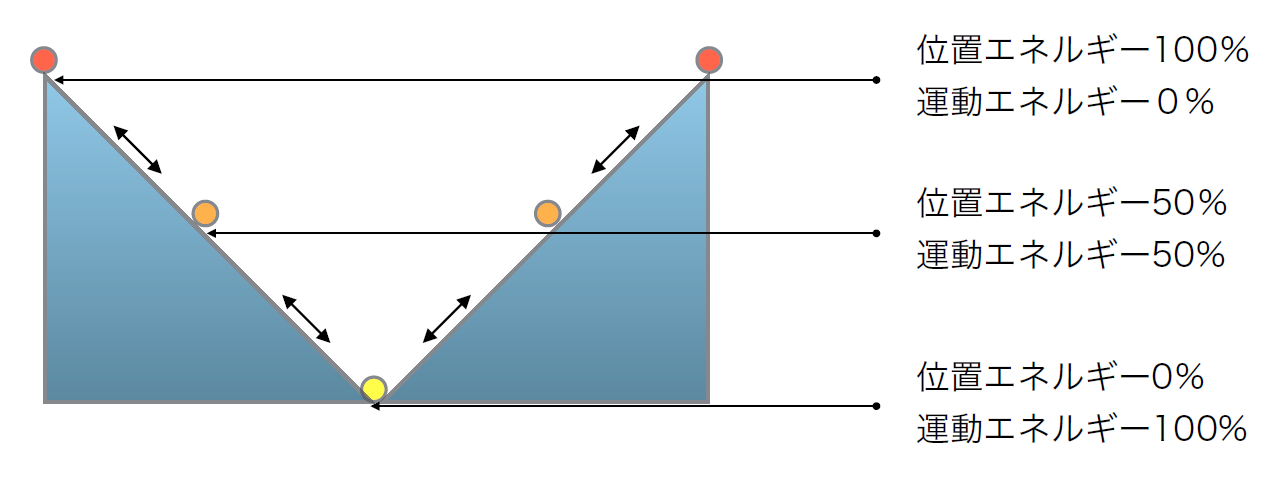
実際のコースターでは、何度か上昇と下降を繰り返す中で、位置エネルギーと運動エネルギーの交換が起こりますが、その和は(摩擦損失を無視すれば)常に一定であるというのが、中学3年理科で習う『エネルギー保存則』です。
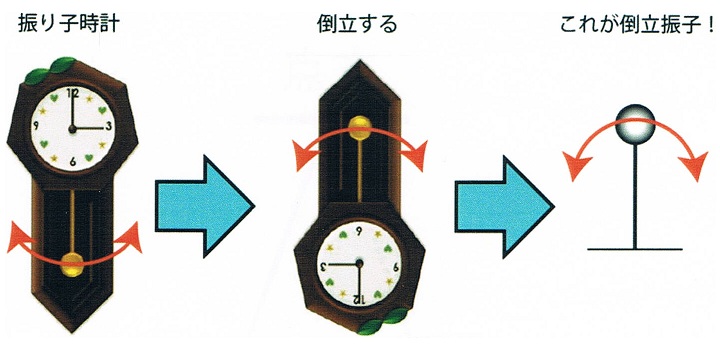
振り子やブランコが高さと速さを交換しながら運動を続けるのも同じ原理です。
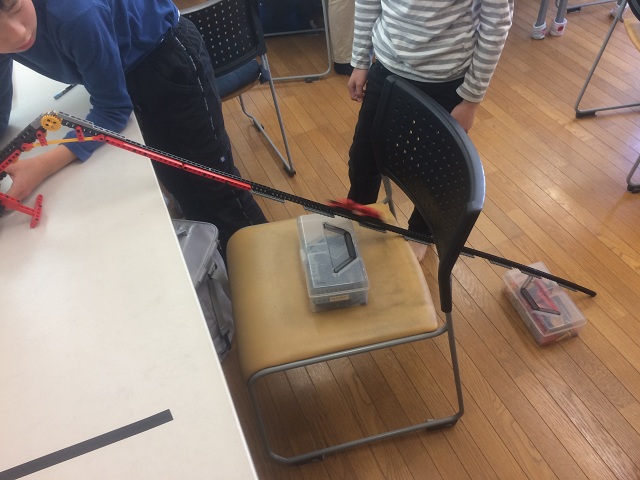
授業の最後に、コースターに人形パーツを乗せて無事に下ることができるか、安全性を至上命令に、スリリングなコースを建設してもらいました。
地上(机上)の高さ以下、奈落の底へと続く下りレールを延長した改造例もありましたが、果たして乗員の運命や如何に。
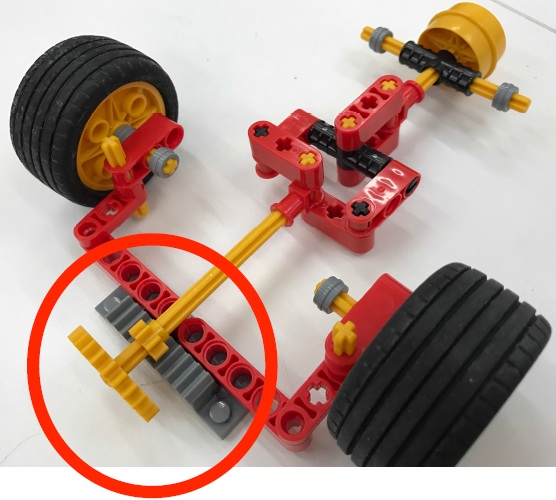
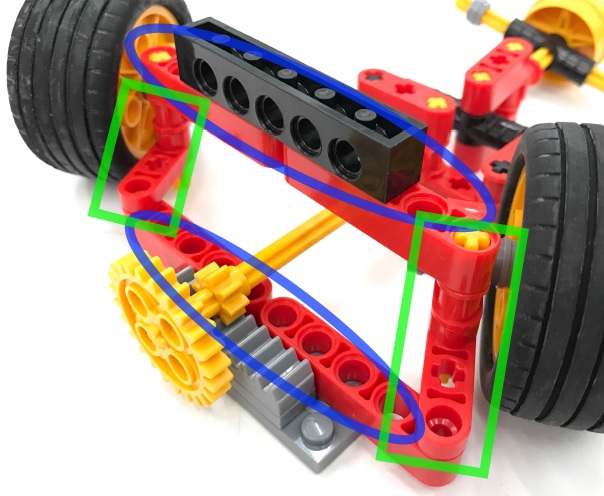
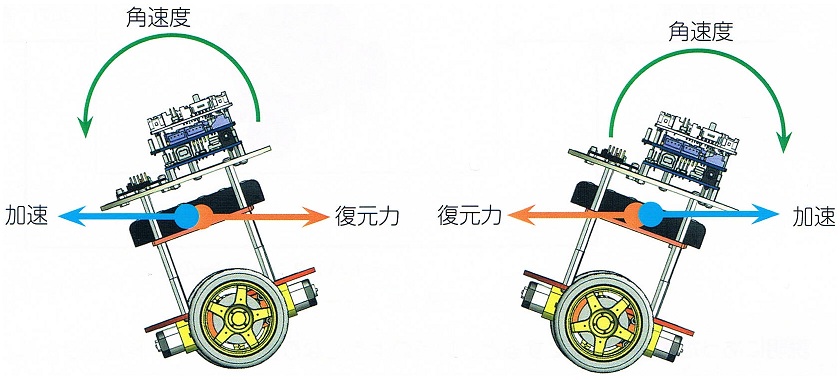
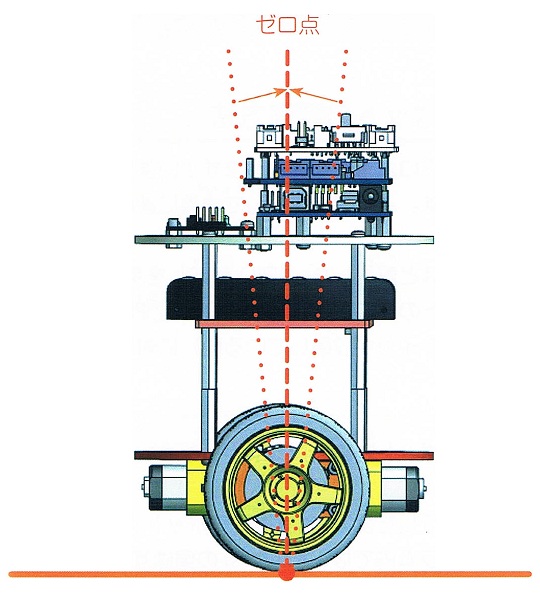
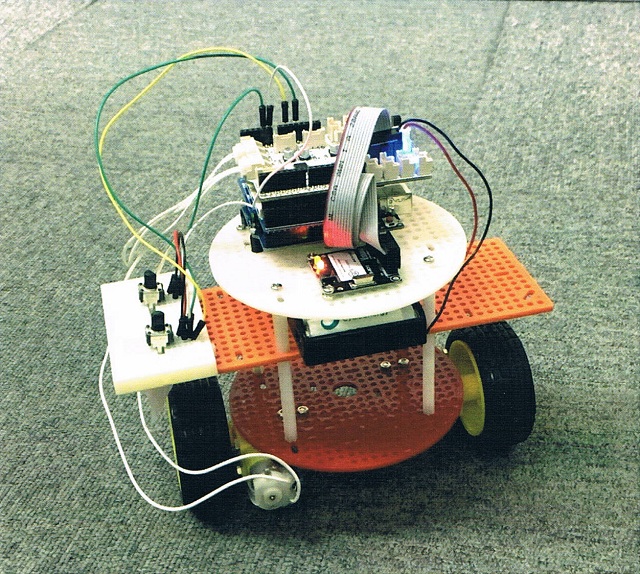
1.4 <プレ・アドバンスコース『ライントレーサー』>
今月アドバンス進級した方の、次月からの本コースに向けた練習テーマです。
とは言え、全国大会競技に通ずるアドバンスコースの醍醐味テーマです。
初めてモーターを2個使用し、初めての光センサーで制御します。
もはや組立手順は載っていません。
完成図(四面図)や配線図を参考に、自力で機能を実装していきます。
光センサーの仕組みも学習しました。
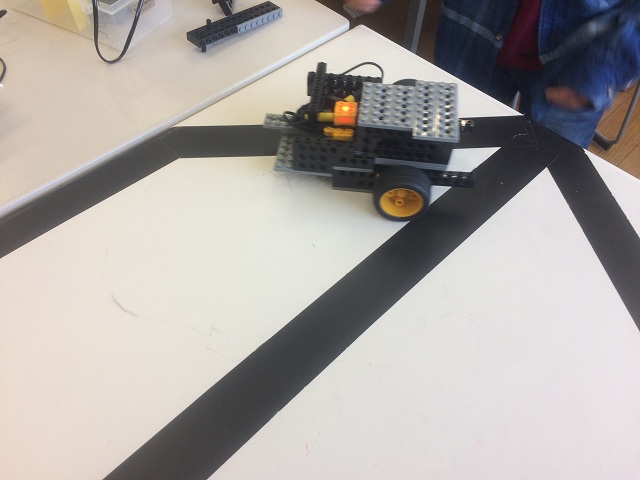
2日目のマシンは、黒テープの縁(光センサーによる白黒検知の境界)に沿って、左右の駆動輪を細かく切り替えながら自律的にコースを周回します。
ミドルコース『ウォールフォロワー』に比べて、2モーターの高速制御によるスムーズな走行を見せつけてくれました。
コースアウトすることも少なく、安定感にまだ余裕がありましたね。
それはそうです、光センサーという立派な半導体制御回路を使っているのですから、輪ゴムに負けるわけにはいきません。
ただ、全国競技レベルには程遠いですよ。
コースアウトするかしないか、ぎりぎりまでスピードを上げ、光センサーとモーターの応答速度の限界まで追求しますよ。
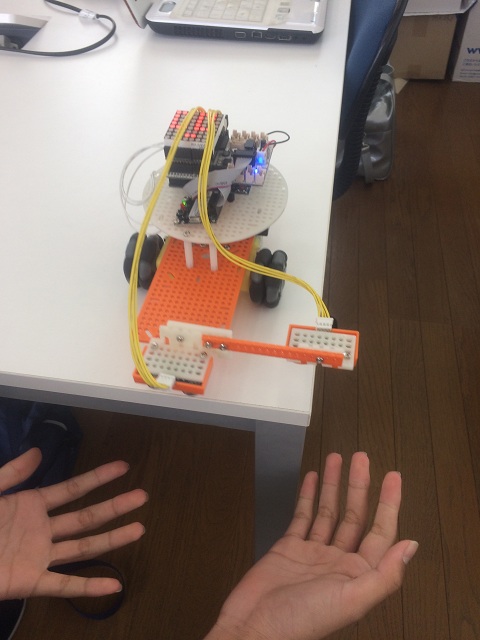
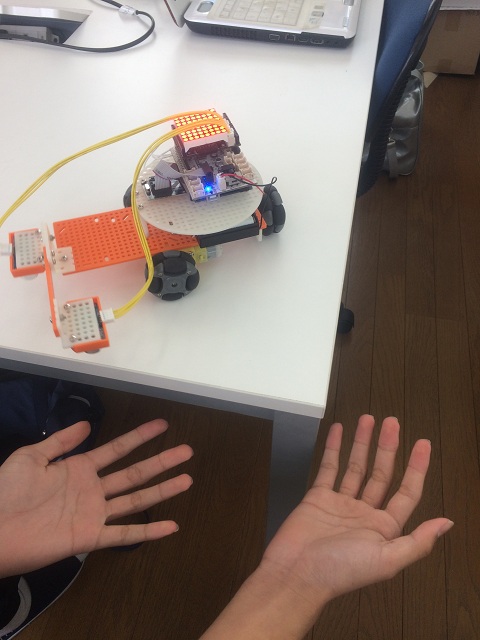
1.5 <アドバンスコース『ステップチャレンジャー』>
2ヶ月目の授業です。
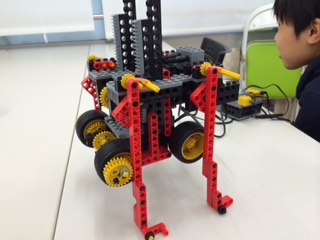
前月2日目に製作した、4輪駆動の台車の“上”のエレベーターに4本脚を取り付け、一旦上昇させたエレベーターを下降させることで4脚を直立させ、台車を浮き上がらせるアイデアです。
4本脚で立ったロボットは、
1) 安定した姿勢で立ち、特に、横や後方へ倒れないこと
2) 前脚を後方へ蹴り、前方へ倒れる初動(動作の契機)を遠隔操作で与えること
3) 4脚が前方へ倒れることで、台車を前方の段差の上面へ水平に落とし込むこと
が実現されています。
各機構がどのように実装されているかについては十分承知のことと思いますが、
それぞれが高度で、特に重要な意味をもつ仕組みと考えるのではなく、
ただの4輪車では乗り越えられない段差を克服するためのロボットとして、
アイデアを寄せ集めた一例に過ぎないと捉えてください。
どんな複雑な機械も、論理も、プログラムも、1つ1つは単純な構成要素を組み合わせて成立しています。
但し、目的の機能を達成するために、個々の要素アイデアに分解して統合し、実現するプロセスこそが高度なのであり、人間の尊い知的営みなのですから、毎回、何か一つでもオリジナルアイデアで代替し、改良し、同等以上の機能を実現してみましょう。
それらの試行が集積して君の本当の力となりますから、難しくても、遅れても、先ずはテキストに紹介された機能を再現してみましょう。
ロボット教室なのですから、苦しくは、ないでしょ?
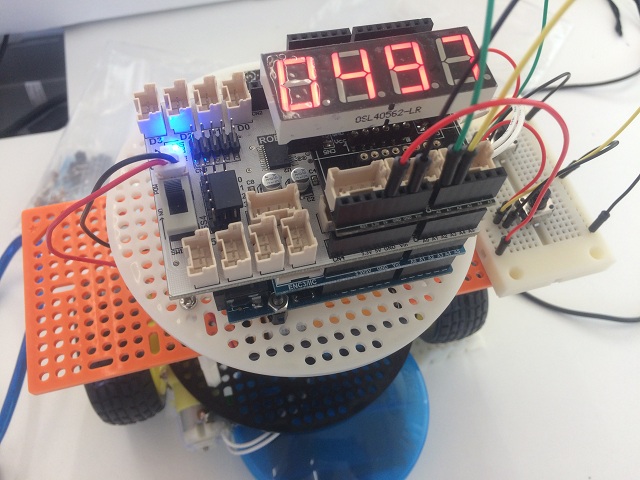
1.6 <プロ2年目コース『不思議アイテム2-I(1)』>
春タームの3ヶ月に入りました。外付けの電子回路をプログラミングで操ります。
これまでも、マイコン(頭脳)の外側にある、モーターやLED表示器などの出力デバイス(手足)、タッチセンサーなどの入力デバイス(感覚)をプログラム制御してきました。
しかし、それらは、単体で所望の入出力デバイスとして機能する完結品で、ハードウェア的作業としては“つなぐだけ”でした。
ここで、もっと、自ら回路を設計し、動かすためのロボット実装スキルを学び始めましょう。
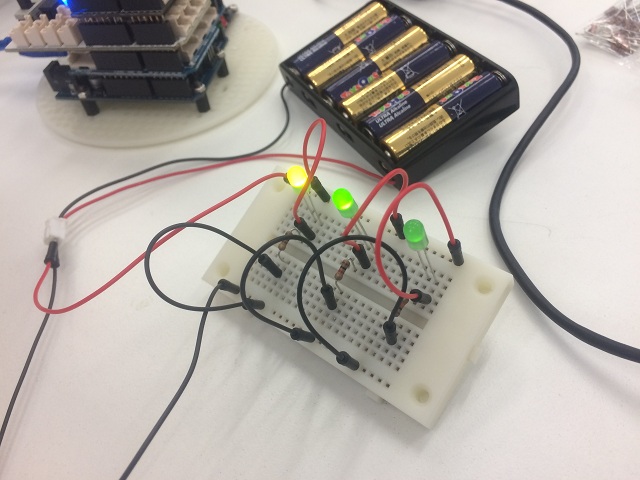
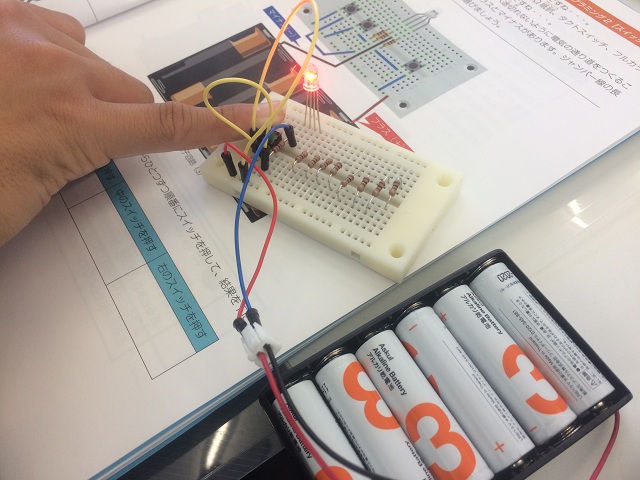
1日目は、電子工作において最も基本的な部品である、LEDと抵抗を使っての点灯実験です。
回路の土台としては、実験やプロトタイピング(試作)に便利なブレッドボードを用います(*1)。
LED(Light Emitting Diode,発光ダイオード)も、点けるだけなら豆電球同様、マイコンは要りませんね。
しかし、小学校理科に登場しない、下記の知識が必要です。
・LED電極には極性(+/-)がある
・過大電流で切れやすいので、保護抵抗を入れる(*2)
・保護抵抗の値を大きくするほど電流が絞られ、暗くなる
マイコンなら、点滅を制御できますね。
8番ピンに繋いだLEDを1秒間だけ点灯するなら、下記のようなプログラムになります。
pinMode(8, OUTPUT); //8番ピン出力モード設定
digitalWrite(8, HIGH); //8番ピンON
delay(1000); //そのまま1000ms放置
digitalWrite(8, LOW); //8番ピンOFF
たったこれだけで!
お、面白い…。マイコンには“手足”をたくさん繋げられます。
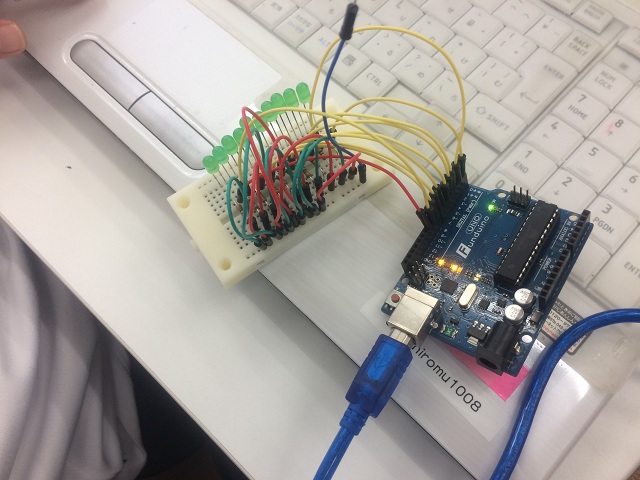
LED本数を増やして、流れるイルミネーションに挑戦です。
しかし、LED本数に比例して、プログラム行数が増えていきます(*3)。
LED3本を0.5秒毎に順次点灯・消灯させるだけで、下記になります。
pinMode(6, OUTPUT); //6番ピン出力モード設定
pinMode(7, OUTPUT); //7番ピン出力モード設定
pinMode(8, OUTPUT); //8番ピン出力モード設定
digitalWrite(6, HIGH); //6番ピンON
delay(500); //そのまま500ms放置
digitalWrite(7, HIGH); //7番ピンON
delay(500); //そのまま500ms放置
digitalWrite(8, HIGH); //8番ピンON
delay(500); //そのまま500ms放置
digitalWrite(6, LOW); //6番ピンOFF
delay(500); //そのまま500ms放置
digitalWrite(7, LOW); //7番ピンOFF
delay(500); //そのまま500ms放置
digitalWrite(8, LOW); //8番ピンOFF
8~10本ともなると、とんでもない量になりました。
点灯パターンを作るのも変更するのも大変な労力です(*4)。
こんなやり方で、キャラクタが跳び回るゲームなぞ作れる訳がないですね。
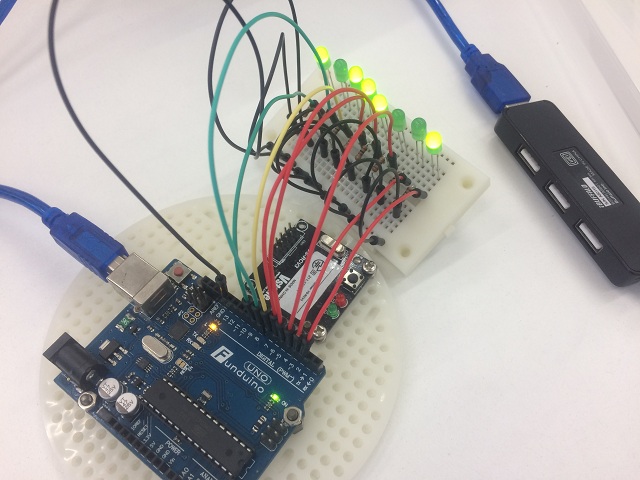
for文を使って書き直します。
int n; //整数型変数n宣言
for(n=6; n<=8; n++) { //n=6, 7, 8
pinMode(n, OUTPUT); //n番ピン出力モード設定
digitalWrite(n, HIGH); //n番ピンON
delay(500); //そのまま500ms放置
}
for(n=6; n<=8; n++) { //n=6, 7, 8
digitalWrite(n, LOW); //n番ピンOFF
delay(500); //そのまま500ms放置
}
このプログラム行数は、LEDが3本でも10本でも変わりません。“繰返しパワー”ですね!
さて、時間制御プログラムを走らせて眺めているだけでは飽きますので、もっとインタラクティブ(interactive,人間の操作が関わる)な電子回路にしましょう。
ゲーム機に近づきます。
タクトスイッチ(押しボタン)を押している間だけLED点灯させます。
“フツー”のスイッチですね。マイコン要らず、簡単です。
回路の実装も動作も予想の範囲内で、感動もありません。
では、同じスイッチを使って、押すとLEDが消える回路を作れるでしょうか。
動作が逆なだけなのに、難しいですね。途端に電気回路の知識が必要になります(*5)。
しかし、「私がスイッチを押したら消して」と誰かに申し付ける方法もあります。
if文を使って、マイコンにやらせましょう。
pinMode(5, INPUT); //5番ピン入力モード設定
pinMode(8, OUTPUT); //8番ピン出力モード設定
if( digitalRead(5) == HIGH ) { //もし5番ピンに入力(スイッチ押下)あれば
digitalWrite(8, LOW); //8番ピンOFF(LED消灯)
} else { //さもなければ
digitalWrite(8, HIGH); //8番ピンON(LED点灯)
}
これは凄いフリーダムです。自分専属の執事を従えたようなものです。
繰返し命令や時間命令を組み合わせれば、押している間だけ消すのも、1回押せば永遠に滅すのも、暫くして復帰するのも、フラッシュ明滅するのも、5分であらゆるスイッチに変身できます。
スイッチ1個でLED3本を同期させるも、時間差でアニメーションさせるも、スイッチ3個で暗号キーを照合させるも、“神”となった君の手中です。
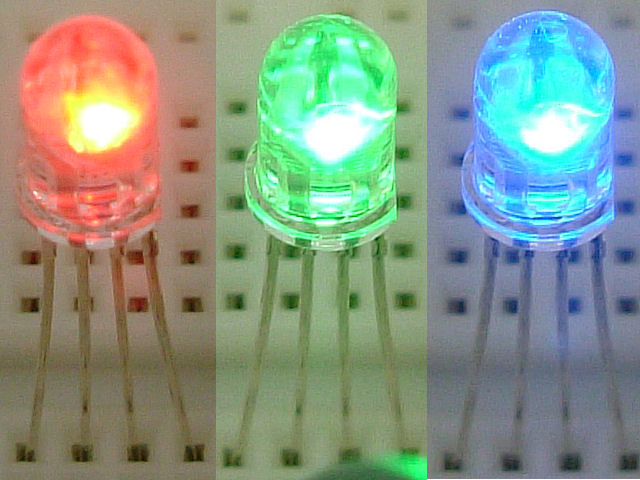
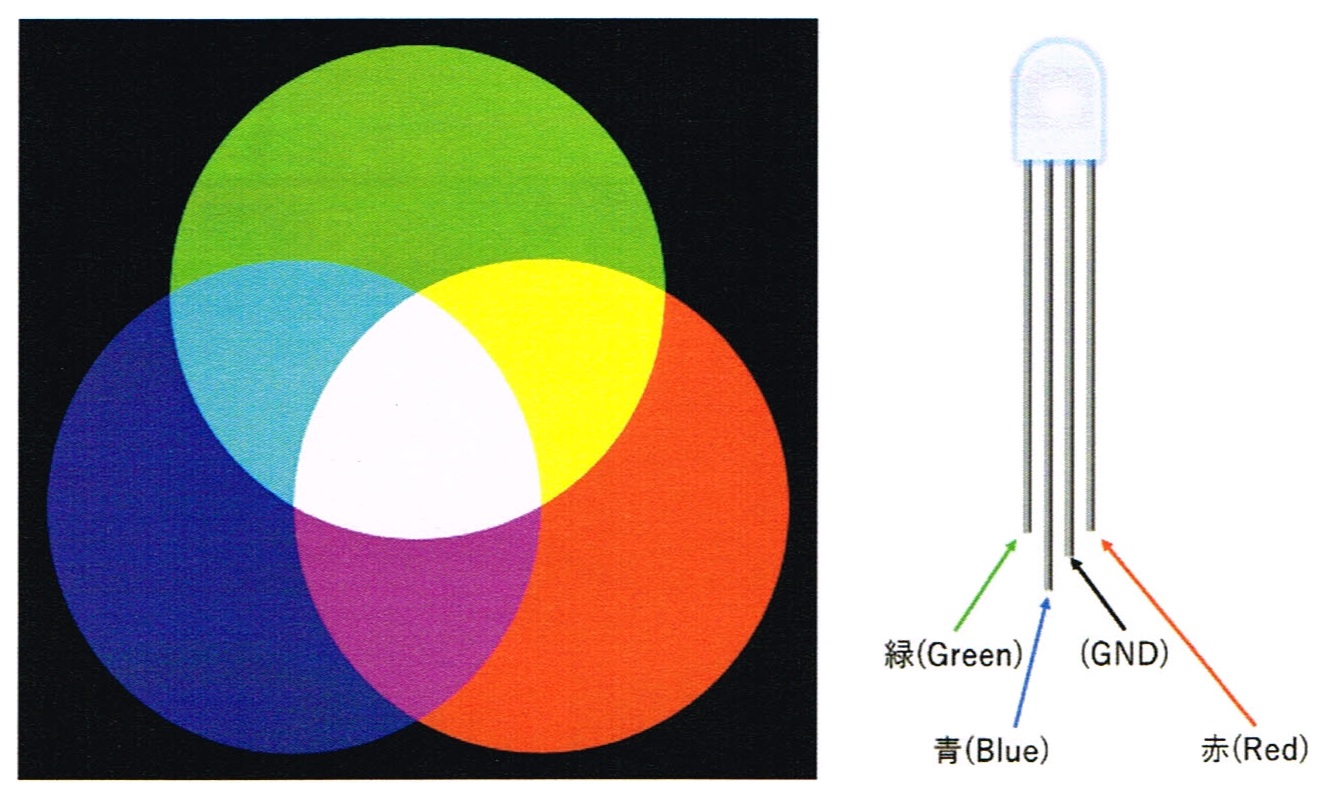
緑色LED3本の代わりに、フルカラーLEDのR,G,B端子を差せば、“光の3原色”の組合せで、2×2×2=8色(デジタルRGB)表現できます。
digitalWrite(8, HIGH) に代わり、analogWrite(8, 128) と書けば、8番ピンの色を50%(128/255)に落とすなど、256×256×256=1677万色(アナログRGB)表現が可能になります(*6)。
光に飽きたら、音です。
tone(A5, 440, 2000) と書き直し、A5ピンにスピーカを繋げば、440Hzの“ラ”が2秒間鳴ります。タクトスイッチは、もう、電子ピアノの鍵盤なのです。
まさに全能です。マイコンなしで電子回路の機能を変更するのは、大変な手間なんですよ。
*1 電子部品の抜き差しが自由で、はんだを使わず、差し込むだけで部品同士を接続できるため。
*2 順(電流が流れる)方向に電圧を上げていくと急激に流れ始めるダイオードの一般的な性質により、焼損しないよう、電源と直列に100~1kΩを入れます。
*3 いや、可能な点灯パターンは爆発的に増えます。「指数関数的に増大する」と表現します。
*4 「コピペのプロになる!」なんて、末恐ろしいことを言わないように…。
*5 かように、マイコンを使わず、要素的な電子部品(受動素子)だけで機能(受動回路)を設計する方が、高度な知識や経験を必要とする面もあります。
「江戸時代のからくり人形より、現代のロボットの方が簡単」とも言えます。
*6 パソコンやテレビと同じ“フルカラー”と称される色数ですが、あくまで机上の計算値であり、電圧に対するLED輝度の非線形領域の使用により、そこまでの再現性はありません。
また、デジタル回路の塊であるマイコンには、真のアナログ信号は扱えないので、PWM制御(1年目1月)により擬似的にアナログ電圧(各ピン256階調)を生成しています。
2. 今月の課題
次回授業日までに完了してください。◎は必須、○は推奨、△は任意です。○△は能力に応じます。
<スタートアップ/プライマリーコース>
特にありません
<ベーシックコース>
○ オリジナル課題プリント(3面図+設問)
○ 上記授業内容を精読する
(概ね3年生以上/低学年は補助 or クイズ出題形式で)
<ミドルコース>
◎ オリジナル課題プリント(3面図+設問)
◎ 上記授業内容を精読する
<アドバンス/プレ・アドバンスコース>
○ 上記授業内容を精読する
<プロ2年目コース>
◎ 上記授業内容を精読する(該当テキストページを見ながら)
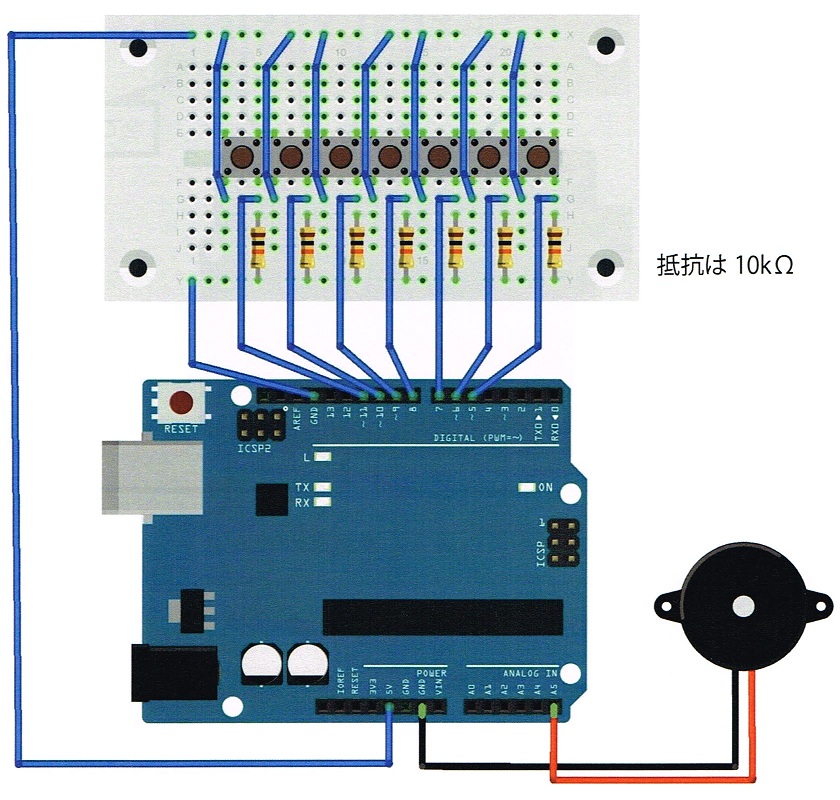
◎ タクトSW7個で“ドレミファソラシ”7音の電子ピアノ[ElectroPiano1改](第2回テキストp.19~20)を完成させる
《ハイレベル挑戦》タクトSW4~7個で8音以上の電子ピアノを設計・実装する
【ヒント】片手5本の指を使った2進法でいくつまで数えられたかな?
必ずしも2進法に則る必要はない
3. 今後の授業スケジュール
8/13(日)を休む為、東福間プロ・小倉北・南教室の8月第1回は一週前倒しになります。
日付の()は臨時、!は原則外、?は予定の意です。
――――――――――【佐藤教室長】――――――――――
[東福間]第1・3土原則
- 10:30~ ミドル/アドバンス
- 13:30~ ベーシック/プライマリ
・5/6, 20, (28※), 6/3?, 17?, 7/1?, 15?
※全コース臨時10:30~
[東福間プロ]第2・4日原則
- 12:45~ プロ2年目
・5/14, 28, 6/11, 25, 7/9, 23, 8/6!, 27
[中間]第2・4土原則<なかまハーモニーホール>
- 13:30~ ベーシック/プライマリ
- 15:15~ ミドル(/アドバンス振替)
・5/13 第1回 3F会議室2
・5/27 第2回 3F会議室2
・6/10, 24, 7/8, 22
[小倉北]第1・3日原則<ムーブ>
- 10:00~ ベーシック/プライマリ
- 13:00~ ミドル
- 15:00~ アドバンス/ベーシック第2部
・5/ 7 第1回 5F小セミ
・5/21 第2回 4F工芸室&和室
・6/4, 18, 7/2?, 16?, 7/30!?, 8/20?
7月はムーブフェスタの為、6/2まで確定できません。代理施設での開催となる可能性があります。
――――――――――【菅本教室長】――――――――――
[とばた]第2・4土原則<ウェルとばた8F>
- 第2・4土 13:00~ 全コース(プロを除く) 時間が30分早くなりました
・5/13, 27, 6/10, 24, 7/8(10:00), 22
――――――――――【中野教室長】――――――――――
[八幡東]第1・3土原則<レインボープラザ4F>
- 13:30~ ベーシック
- 15:30~ ミドル
- 17:30~ アドバンス
・5/6, 20, 6/3, 17, 7/1, 15
[小倉南]第2・4日原則<総合農事センター2F>
- 10:30~ ベーシック/プライマリ
- 13:00~ ミドル /アドバンス
・5/14, 28, 6/11, 25, 7/9, 23, 8/6!, 27
4. お知らせ
1) 電池について・単4乾電池4本(+ダミー1本)、または充電池5本(6V)を推奨します。
プロ本体は単3×6本、コントローラは単4×3本です。
・電池不足が多く見受けられ、進行上の支障となっております。
電池チェッカー・予備電池を用意し、自ら残量の管理を。
・教室サービス時、原則として電池代4本108円+診断料108円を頂きます。
2) 宿題ポイント交換会【ベーシック・ミドルのみ/5月~アドバンス対応】
5月第1回「授業前」に景品交換します。その後も3ヶ月毎に予定します。
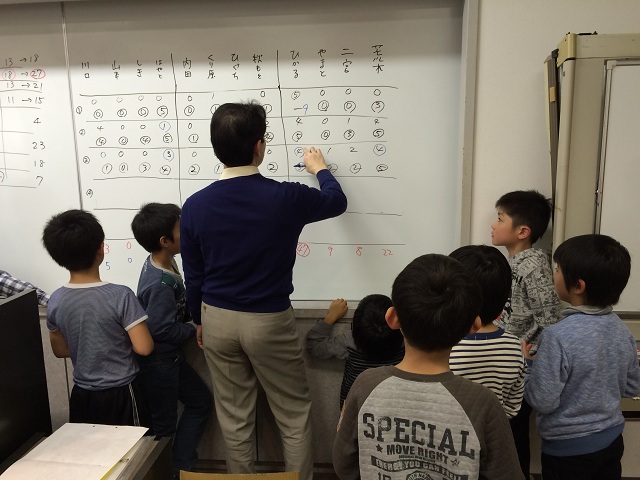
3) 3月課題 高得点者 []内は教室と学年
◆ベーシック【20名平均 図面6.8】
10点…川村[中間3], 橋本[小倉北2]
9点…佐藤[東福間3], 谷川[八幡東2], 原[小倉北3]
8点…田中[東福間4], 宮尾[八幡東3], 荒木[小倉北2], 大橋[小倉北3], 杉本[小倉北4]
◆ミドル【15名平均 図面2.7+設問2.5=5.1】
10点…なし
9点…なし
8点…岩熊[中間5], 山本[中間4], 辻[小倉北5]
7点…江平[小倉北6], 吉良[小倉北5]
東福間・中間・小倉北教室 佐藤 / 八幡東・小倉南教室 中野